

Инструкция по точной настройке pid
Знакомство с воздействием P, I и D на характеристикиР – это величина корректирующей силы, приложенной для того, чтобы вернуть модель в начальное положение.Величина силы пропорциональна общему отклонению от изначальной позиции минус любое командное воздействие на изменение направления с пульта управления.
Более высокое значение Р создаст более мощное усилие по сопротивлению любой попытке изменить положение модели. Если значение Р слишком велико, то при возврате в исходное положение возникает перерегулирование и, следовательно, требуется противоположная сила, чтобы компенсировать новое отклонение.
Увеличение значения Р:- Приводит к большей устойчивости /стабильности до тех пор, пока слишком большое значение Р не приведет к колебаниям и потере контроля над моделью.- Вы заметите очень большую силу воздействия, противодействующую любому изменению положения модели.
Уменьшение значения Р:- Приведет к дрейфу в управлении до тех пор, пока слишком малое значение Р не сделает модель неуправляемой.- Коптер будет меньше сопротивляться любым попыткам изменить его положение.
Акробатические (пилотажные) полеты требуют чуть более высоких Р. аАккуратные и плавные полеты – чуть более низкого Р.
I – это период времени, в течение которого угловые отклонения записываются и усредняются.Величина силы, прикладываемой для возврата в исходное положение, увеличивается на значения I настолько долго, насколько угловое отклонение сохраняется, пока не будет достигнута максимальная величина усилия. Более высокое значение I способствует улучшению курсовой устойчивости.
Увеличение значения I:- Увеличит способность удерживать начальное положение и уменьшит дрейф, но так же увеличит задержку возврата в начальное положение.- Также уменьшает влияние Р.
Уменьшение значения I:- Улучшит реакцию на изменения, но увеличит дрейф и уменьшит способность удерживать положение.- Так же увеличивает влияние Р.
Акробатический полёт: требует немного меньших значений IАккуратный плавный полёт: требует немного большие значения I
D – это скорость, с которой модель вернется в его начальное положение.
Увеличение значения D: (означает меньшее число, т.е. значение близкое к нулю) улучшает скорость, с которой отклонения восстанавливается.- Увеличение значения D (помним, что это значит МЕНЬШЕЕ число, т.к. значение отрицательное) увеличивает скорость, с которой все отклонения будут скомпенсированы.
Уменьшение значения D: (это уже значит БОЛЬШОЕ число (дальше от нуля), т.к. это отрицательно значение)- Уменьшает колебания при возврате в начальное положение.- Возврат в начальное положение происходит медленнее.- Так же уменьшает эффект от изменения Р.
Для акробатического полёта: увеличьте D (меньшее число, т.е. ближе к нулю)Для аккуратного и плавного полёта: уменьшите D (большее число, т.е. дальше от нуля)
Настройка gps модуля
Этот пункт не обязателен, только если у вас возникли проблемы с настройкой I2C-GPS-NAV модуля. Скачивайте программу U-center с сайта производителя U-box. С ее помощью можно задать скорость обмена данными и узнать кодировку данных.
Настройка i2c gps navi
Подключаем FTDI переходник к плате. Скачиваем архив с скетчем I2C_GPS_NAV.zip (файл в конце статьи). С помощью Arduino IDE открываем файл /I2C_GPS_NAV.ino в списке файлов выбираем config.h в нем будем производить настройку под наш GPS модуль.Выполним следующие изменения:
- #define GPS_SERIAL_SPEED 9600 // в моем GPS модуле задана такая скорость обмена даными. Вам нужно указать свою. Обычно это 57600
- #define NMEA // в моем GPS модуле используется такой протокол данных, у вас он может быть UBLOX или MTK
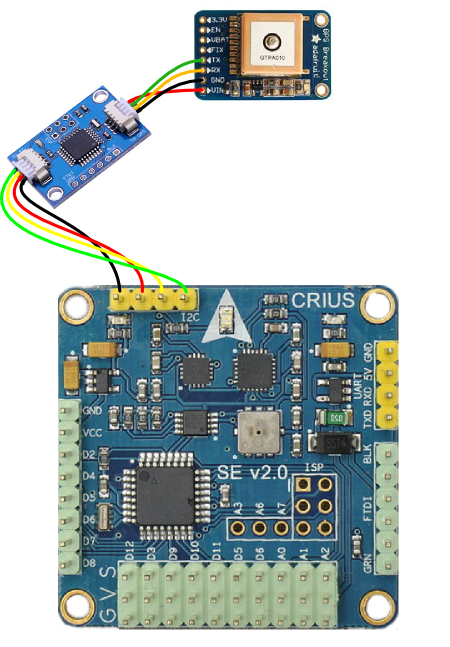
Остальные настройки менять не нужно. Зашиваем скетч с теми же настройками, что прошлый раз (все платы одинаковые). Подключаем компоненты:
При включении модуль отображает состояние с помощью красного диода.Если диод зажигается/гаснет каждую секунду – модуль GPS не обнаружен – проверяйте настройки кодировки и скорости данных, они не соотвествуют тем, что отдает GPS.Если диод моргает одиночными короткими вспышками – данные передаются, но спутники не найдены.Если диод трижды быстро моргает – данные передаются, найдены спутники – все отлично.
Мы можем еще раз подключить FTDI адаптер к Multiwii. В программе конфигурирования отображаются данные о координатах с GPS модуля тем самым убедиться, что все работает верно.
Настройка minimosd
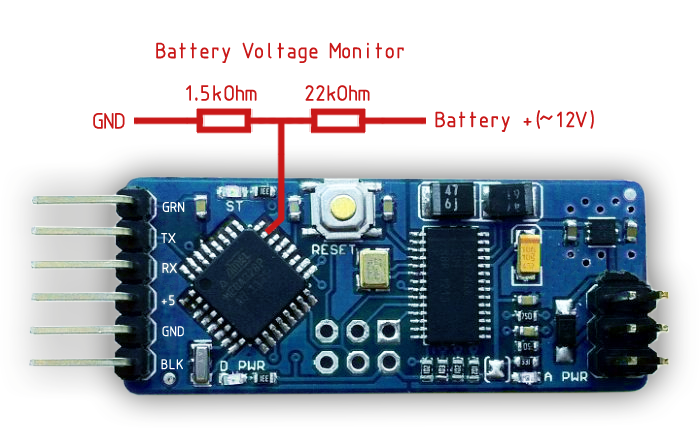
На рынке есть как минимум три типа таких модулей. Самый неудобный классический Minimum OSD. В нем нет встроенных резисторов для замера напряжения питания и приходится колхозить вот так:
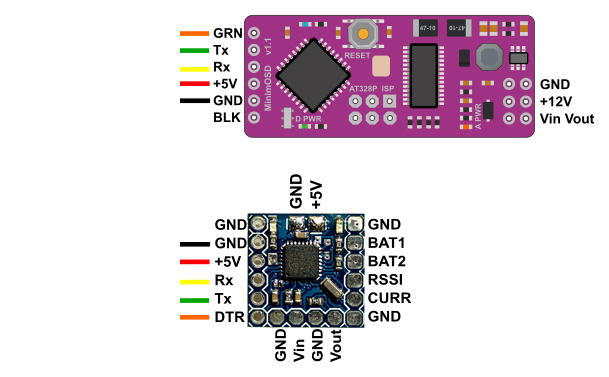
Так что лучше выбрать платы с пинами под измерение напряжения батареи или Micro версию. Вот их распиновки:
С подключением все понятно – подключаем FTDI переходник и переходим к прошивке. Прошивки можно использовать разные: ArduCAM, MWOSD и пр. Качаем архив с скетчем scarab-osd-1.6.zip (файл в конце статьи). Это последняя бесплатная версия программы MW OSD.
Она отлично дружит с Multiwii без каких-либо настроек. Из минусов – в версии 1.6 нельзя менять местами индикаторы на экране.Выполняем до боли знакомый порядок действий: открываем в Arduino IDE файл /MW_OSD/MW_OSD.ino в настройках файла Config.h нужно раскомментировать строки:
- #define MULTIWII // поддержка обмена данными мультиваем
- #define FIXEDWING // тип нашей модели – летающее крыло или самолет
Зашиваем скетч так же как прошлые два раза.
Следующая задача – сконфигурировать OSD. Запустим программу конфигурирования из папки /MW_OSD_GUIВыбираем наш com порт.
Жмахаем SETTINGS READ.
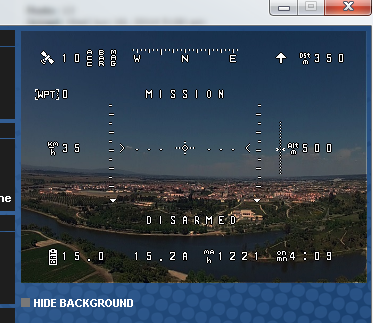
Теперь нужно пройти по всем настройкам и задать отображение нужных вам данных. Отдельно отмечу, что Voltage Adjuist нужно подбирать опытным путем, что бы расхождения в показаниях напряжения батареи были минимальными.Последний шаг – загрузить шрифт.
Стандартный шрифт отображает некоторые линии китайскими загагулинами – это не столь круто. Скачиваем файл digital.mcm (файл в конце статьи), затем нажимаем SELECT, а после выбора файла UPLOAD. Дожидаемся загрузки шрифта. Все, можно подключать OSD к Multiwii. UART разъем OSD нужно подключить к UART разъему Multiwii.
Важно! Если вы с подключенной OSD попытаетесь подключиться к Multiwii по FTDI, то у вас скорее всего ничего не выйдет т.к. они используют одни и теже порты – по тому перед заливкой скетча в Multiwii или перед конфигурированием отключайте OSD от платы, что бы не тратить время на поиски причины.
Настройка модуля стабилизации полета multiwii (автопилота)
Это основной модуль который будет управлять моделью. Конечно, вам кажется, что управляете вы, но сигналы с РУ напрямую не идут на привода – управлять ими будет микроконтроллер. Так что это уже с некоторой натяжкой.Функции контроллера: включать горизонтальную стабилизацию (стабилизировать полет) при включении таковой по сигналу AUX1; спасать модель при потере сигнала (FAIL-SAFE); вести модель к точке взлета при сигнале с земли AUX2 (Return To Home – RTH); обмениваться данными с телеметрией; работать с экранным меню в телеметрии (доступны такие опции как регулировка PID т.е. характеристик стабилизации) и пр. функции.
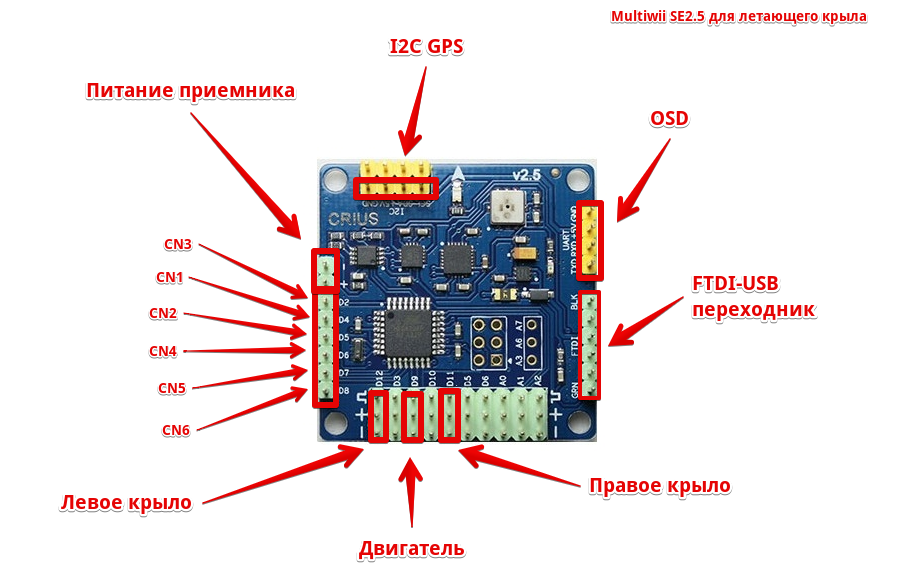
В корпусе встроены: акселерометры, гироскопы, барометр, магнитометр. Все эти датчики используются при полете, к ним еще добавится GPS, но чуть позже.Модуль должен жестко устанавливаться в корпус модели, принимать все вращательные моменты. После этого нужно правильно подключить двигатель, сервы и каналы от приемника. Сделать это можно руководствуясь схемой:
Установка fpv и телеметрии на квадрокоптер
Данная статья является продолжением статьи
«Квадрокоптер на MultiWii SE v2.5 — от задумки до первого полёта»
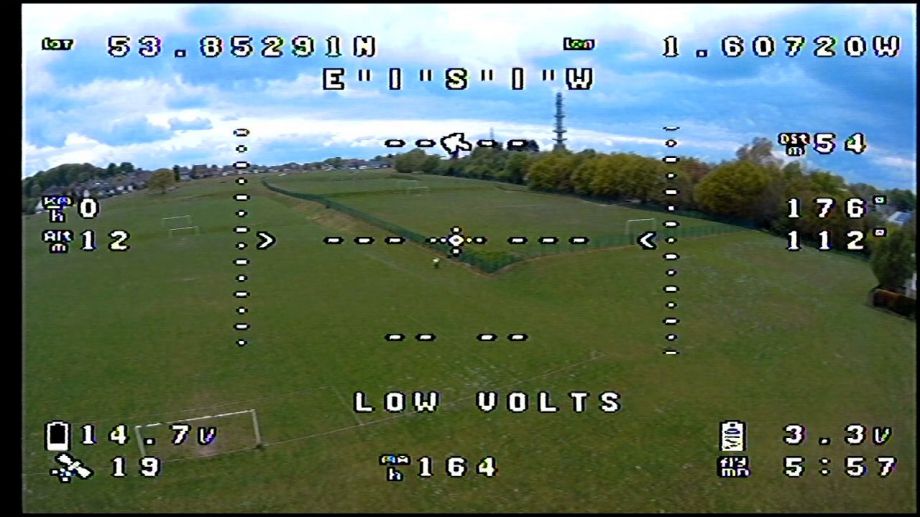
, в ней я поделюсь с Вами своим опытом установки и настройки FPV оборудования на квадрокоптер для полётов от первого лица. Заинтересовавшихся прошу под кат.


Используемые комплектующие:
1. Приёмник/передатчик Boscam 5.8Ghz 200mW 8 Channel FPV Audio Video Transmitter & Receiver TS351 RC805 2Km
2. Телеметрия CRIUS MAVLink-OSD v2.2
3. CRIUS NEO-6 GPS v3.0 I2C-GPS NAV Module v1.1
4. FPV монитор (использовал старый телевизор)
5. FPV камера (использовал уличную камеру видеонаблюдения)
Передатчик TS351, телеметрию MAVLink-OSD и камеру подключаем к MultiWii SE v2.5 по схеме ниже:


Модуль GPS NEO-6 подключаем к модулю I2C-GPS в разъём «GPS», а модуль I2C-GPS через разъём «FC» подключаем к MultiWii в разъём «I2C».




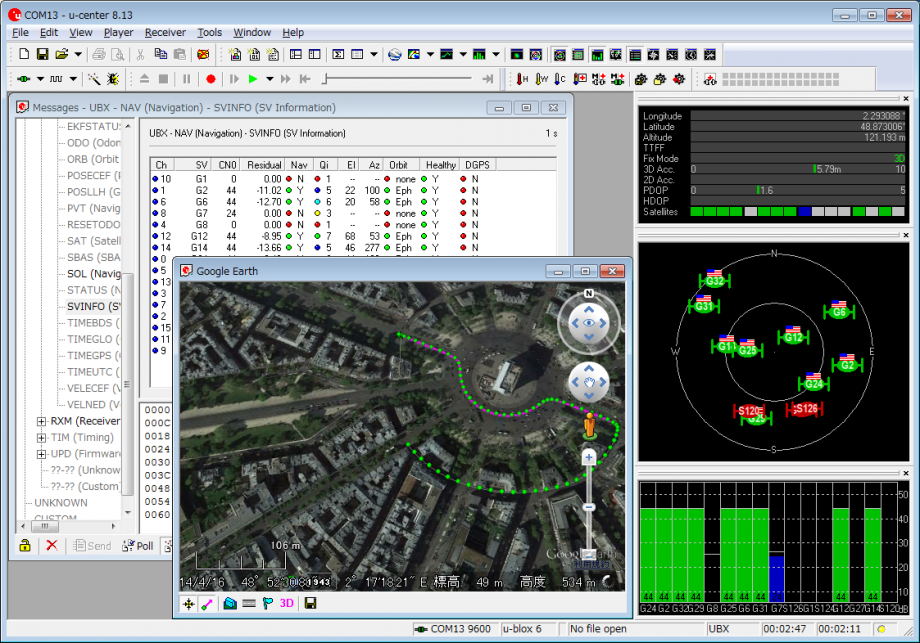
Проверка модуля GPS NEO-6 на работоспособность: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, 5V к VCC) к PC; запускаем на PC установленную программу «u-center» (ссылка на прогу в конце статьи); выбираем автоматическую скорость передачи данных -> нажимаем «Autobauding» (цифра «1»); выбираем COM порт, к которому подключен модуль GPS NEO-6 (цифра «2»); ждём…, если всё сделали правильно, через некоторое время начнут поступать данные от модуля GPS NEO-6 (цифра «3»), у меня уже через 3-4 мин. пошли данные.

Прошивка телеметрии MAVLink-OSD: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, 5V к VCC) к PC; запускаем на PC программу «Arduino IDE»; открываем прошивку «KV_Team_OSD_2.3» (ссылка на прошивку в конце статьи) — запускать нужно файл KV_Team_OSD_2.3/KV_Team_OSD/KV_Team_OSD.ino; прошиваем… Далее нужно прошить шрифты; запускаем KV_Team_OSD_2.3/KV_Team_GUI; выбираем COM порт, к которому подключен модуль MAVLink-OSD; в блоке «FONT TOOLS» нажимаем «BROWSE», выбираем шрифт «KVTOSD_FMap_v1_Small.mcm», нажимаем «Upload» и ждём пока шрифты загрузятся, в процессе будет мигать индикатор «TX» в блоке «PORT STATUS»; Теперь в блоке «OSD Controls» нажимаем «READ» (прочитать данные с платы), вносим необходимые настройки для отображения нужной Вам информации на мониторе, нажимаем «WRITE» (записать на плату). P.S. — небольшое отступление, я перепробовал не один десяток прошивок для MAVLink-OSD, но во всех шрифты никак не хотели прошиваться, то ли это особенность этой платы, то ли помогло то, что прошивая шрифты из прошивки «KV_Team_OSD_2.3» я подал питание от аккума (12V) на «аналоговую часть» платы, а «цифровая часть» платы соответственно питается от 5V!


Подключаем приёмник RC805 к монитору и при желании крепим это всё на аппу. Помните, что для корректного видео сигнала, каналы на приёмнике/передатчике должны быть идентичны!


Ссылки для скачивания:
Программа u-center
Прошивка KV_Team_OSD_2.3
P.S. — статья была подготовлена более 2-х лет назад и благополучно забыта в черновике, возможно уже и не актуальна, но всё же решил опубликовать, строго не судите…
Заключение
Точно следуйте инструкциям и никаких проблем у вас не возникнет, а результат компенсирует все затраченные нервы. OSD контроллер полета – это очень приятная штука. Они помогут вам расслабиться и насладиться полетом, перестать бояться потерять модель или разбить при недостаточных навыках. Автопилот и стабилизация решат все проблемы щелчком тумблера, если не слишком поздно)) Enjoy!





 купить по привлекательной цене 46990 руб. в Москве")