
 - Dji-Club")
Инструкция по работе с геодезическими квадрокоптерами
Перед началом аэрофотосъемки (АФС) необходимо:
– Зарегистрировать ваш квадрокоптер в Росавиации;
– Проверить отсутствие запретных для полета зон в месте проведения работ. Карта запретных зон для квадрокоптеров DJI;
– При необходимости получите разрешения на полет квадрокоптера у местных органов власти;
– Оценить приемлемость погодных условий для полетов (отсутствие осадков, тумана, сильного ветра (более 10 м/с), высоту нижнего края облачности и пр.);

Подготовка оборудования
– Проверьте разъем питания аккумулятора на предмет оплавления и загрязнение. Включите квадрокоптер и убедитесь в отсутствии предупреждений и ошибок в приложении DJI GO 4.
– Используйте карту памяти U3 класса, с объемом от 16 до 64 Гб. Карты 128 Гб могут вызвать зависание камеры на 10-40 секунд во время интервальной съемки.
– Зарядите аккумуляторы. Одна батарея в среднем обеспечивает 27 минут полетного времени или 70-90Га охватываемой площади.
– Зарядите пульт управления.
– Зарядите аккумулятор базовой станции и убедитесь в достаточности объема свободной памяти. Настройте режим записи измерений статики в точке с известными координатами.
Подготовка к АФС
Для получения качественного фотоматериала, помимо правильных настроек камеры, необходимо уменьшить проявление различных артефактов, таких как: тени, блики, пересвеченные и перетемненные области.
Для этого:
– Производите АФС в светлое время суток. Идеально, если солнечный свет будет рассеян тонкой, высокой, сплошной облачностью. В ясный день, лучшее время для съемки: пару часов после рассвета и перед закатом.
– Блики можно устранить поляризационными фильтрами.
– Для подбора оптимальной экспозиции, ориентируйтесь на изображение транслируемое с камеры и используйте гистограмму.
– Полезно сделать тестовый вылет в несколько различных точек области проведения работ, сделать тестовые фото с разной экспозицией, оценить обстановку, убедиться в отсутствии помех, проверить уровень сигналов от спутников, связь, силу ветра и т.д.
Планирование маршрута полета
Для построения конечного продукта – цифровой модели местности, рельефа, карты высот, ортофотоплана и т.д., фотограмметрической программе необходимо большое количество качественных фотографий местности.
Фото должны иметь достаточное продольное и поперечное перекрытие, для поиска общих точек между всеми соседними фотографиями. Для обеспечения этого необходимо, чтобы квадрокоптер находился на определенной высоте и летел по определенному маршруту делая фотографии с разной периодичностью.
Существуют специальные приложения которые управляют квадрокоптером и делают все в автоматическом режиме в соответствии с настройками пользователя.
Вот некоторые из них: Litchi проф. планировщик teofly.com, Pix4D Capture, MapPilot, DroneDeploy, DJI GS Pro и другие.
Существуют также решения с построением маршрута в сторонних программах с последующей загрузкой в полетное приложение с помощью KML файла. Например платные Litchi или MapPilot.
Данный метод подходит для продвинутых пользователей и позволяет контролировать множество параметров прохождения маршрутов а также получать бОльшую производительность.
При правильном построении маршрутов, квадрокоптер летает по оптимальной траектории и не останавливается в поворотных точках что существенно сокращает время полета. При средней скорости горизонтального перемещения 10 м/с, максимальное расстояние которое может пройти коптер за один полет – 11 км.
Интервальное фотографирование при этом методе можно производить не зависимо от приложения, с помощью модуля синхронизации камеры Ashot.
Активация модуля управления камерой Ashot
Модуль позволяет производить фотографирование без участия приложения с частотой 1 кадр каждые 1.3 или 1.8 секунды, а также передает сигнал о фото событии в GNSS приемник, точно в середине выдержки.
Для активации Ashot необходимо выполнить следующие действия:
1. Настройте на кнопки С1 или С2 пульта управления, функцию опускания камеры вниз (в надир, -90) и поднимания вверх (в горизонт, 0). Функции Camera Forward/Down в приложении DJI GO4, Restart Gimbal (Рестарт подвеса) в Litchi.
2. Опустите камеру вниз.
3. Из нижнего положения поднимите кнопкой камеру вверх и сразу опустите вниз. Камера начнет делать фотографии с интервалом 1.3 секунды.
4. Для активации интервала 1.8 секунды, из нижнего положения поднимите камеру вверх и через 1,5-2 секунды опустите вниз.
5. В процессе фотографирования можно управлять наклоном камеры колесиком на пульте управления. Фотографирование не остановится.
6. Для того чтобы остановить фотографирование, из нижнего положения поднимите камеру вверх и сразу опустите вниз.
Также АФС можно производить в ручном режиме, стиками регулируя скорость и направление движения квадрокоптера. Фотографирование при этом можно осуществлять с помощью модуля Ashot, либо по таймеру каждые 2 секунды (настраивается в полетном приложении).
В полетном приложении при этом виден пройденный маршрут и можно контролировать параллельность галсов для обеспечения необходимого перекрытия и исключения не охваченных зон.
Данный режим можно рекомендовать только опытным пользователям, при небольших объемах съемки, а также в местах с высокой вероятностью сбоя навигационной системы (зоны глушения сигналов).
Во всех случаях, рекомендуется строить маршруты так, чтобы квадрокоптер в основном летал под углом в 90 градусов к направлению ветра.
При полетах над рельефом с перепадами высот, рекомендуется летать вдоль изолиний рельефа.
Настройка камеры
– Переключатель режима камеры: положение A (режим приоритета диафрагмы).
– ISO (светочувствительность): 100
– Aperture (диафрагма): 2.8-8, в зависимости от освещенности. Очень важно чтобы выдержка при фотографировании была не короче 1/1600. С выдержкой 1/2000 и короче, перестает работать механический затвор – что ухудшает качество фото.
– White Balance (баланс белого): Sunny или Cloudy
– Style (стиль): Landscape
– Color (цветовая схема): None или Normal
– Image Size (пропорции фото): 3:2
– Image Format (формат изображения): JPG
– Mechanical Shutter (механический затвор): включено
– Фокусировка камеры: режим M (ручной) и перевести фокус в бесконечность
Раскладка опознаков
При проведении АФС на квадрокоптере с GNSS приемником, мы получаем точные координаты центра каждого кадра. Это дает возможность строить цифровую модель местности и привязывать её в плане, достаточно точно и без опознаков.
Не смотря на это, мы рекомендуем использовать несколько опознаков для контроля получаемых данных. А также, хотя бы один опознак нужен для автоматической калибровки камеры в фотограмметрической программе и уточнения высоты модели.
Опознак – это хорошо различимый на фото объект, с ярко выраженным центром с известными координатами. В качестве опознака можно использовать ранее созданные элементы (например дорожная разметка) или создать свои (краской или полотнищами в виде Х или Г, пластиковыми тарелками).
Координаты опознаков обычно определяют методом RTK.
Раскладывать опознаки лучше в местах с наибольшей и наименьшей высотами снимаемой территории, а также ближе к её границам.
Работа с базовой станцией и приемником квадрокоптера
Все геодезические квадрокоптеры на базе DJI Phantom 4 Pro и DJI Phantom 4 Pro v2.0, применяют пост-процессный метод обработки данных (PPK). Для успешной реализации данного метода, необходимо использовать два GNSS приемника, которые записывают сырые данные измерений в формате Rinex. Один устанавливается в точку с известными координатами и пишет статику с частотой не менее 5Гц, с 5-15° маски возвышения (базовая станция). Другой выступает в качестве ровера на борту квадрокоптера.
По завершении полета, необходимо скачать и обработать эти два файла в телеграм-боте Teobox PPK Bot.
Подключение и настройка приемника AGNSS (L1/L2) установленного на квадрокоптер (ровер):
1. Накрутите антенну, включите квадрокоптер и дождитесь готовности платы AGNSS. Она будет издавать звуковой сигнал (бип бип бип).
2. После прекращения подачи звукового сигнала AGNSS будет мигать желтым индикатором в переднем левом луче квадрокоптера, пока не соединится по крайней мере с 6-ю спутниками, после чего индикатор начнет мигать зеленым.
4. Найдите сеть “AGNSS_XXXX” в настройках Wi-Fi вашего мобильного устройства или ноутбука и подключитесь с паролем “12345678”.
5. После подключения введите адрес http://192.168.0.1 в адресную строку вашего браузера для входа в веб-интерфейс AGNSS, для проверки настроек.
6. Рекомендуемые настройки: Запись исходных данных GPS ГЛОНАСС 10 Гц.
7. Приемник будет автоматически начинать запись данных при включении квадрокоптера и завершать её при выключении. Таким образом, на каждый полет будет создаваться отдельный файл с данными.
Для подключения и настройки базовой станции, воспользуйтесь инструкцией производителя.
В качестве базовой станции можно также использовать GNSS приемники референцной геодезической сети. Вы можете запросить Rinex файл измерений, покрывающий зону и время полета квадрокоптера. Перед полетом необходимо убедиться что станция активна и запись измерений производится.
Так как самая быстрая частота записи таких станций в основном составляет 1 Гц, коптер перед взлетом необходимо выдержать включенным не менее 2-х минут на открытой местности, для сбора достаточных данных, если базовая станция находится дальше 10 км.
Максимальное расстояние до референцной базовой станции: не далее 50 км;
Подготовка квадрокоптера
1. После включения квадрокоптера и размещения его на открытом пространстве, подождите не менее 2-х минут для поиска спутников и сбора достаточного количества данных. В это время включите приложение DJI GO4 и убедитесь в отсутствии критических предупреждений или ошибок.
2. Отформатируйте SD карту в квадрокоптере!
3. Проверьте состояние компасов квадрокоптера, показания должны находиться в зеленой области. Если показания колеблются в желтой или красной зоне, необходимо устранить источник магнитных наводок, либо изменить место взлета. При необходимости произведите калибровку компасов. Калибровку можно производить только вдали от потенциальных источников магнитных наводок (металлические объекты, ЛЭП, стоянки, железобетонные конструкции и т.д.).
4. Если полет производится при низких температурах, после взлета дайте коптеру повисеть на месте пару минут, для разогрева батареи. Выполняйте полет плавно, без резких наборов высоты и продолжительных повышенных нагрузок.
5. Перед взлетом убедитесь что квадрокоптер поймал минимум 8 спутников.
6. Для взлета используйте ровную, твердую, не пыльную поверхность. Можно стартовать с серого транспортировочного кейса. Не взлетайте с капота или крыши автомобиля, т.к. это вызовет проблемы с компасом.
7. При ручной посадке, если площадка ограниченная, квадрокоптер можно поймать рукой за основание ножки. После этого опустите правый стик пульта управления (газ) до упора вниз и подержите так 3 секунды, пока моторы не остановятся.
8. Во время полета, в том числе в автоматическом режиме, следите за телеметрией квадрокоптера и его положением в пространстве, а так-же за корректностью прохождения маршрута. Будьте готовы в случае необходимости, перейти на ручное управление.
ВНИМАНИЕ! Не начинайте или не продолжайте полет, если вы обнаружили какое-то не нормальное поведение квадрокоптера (появление не понятных вам сообщений или предупреждений в приложении, отклонение от маршрута, потеря сигнала управления и/или трансляции видео на малых расстояниях, потеря спутников без видимых причин, не адекватный отзыв на ручное управление и т.д.). В случае наступления данных обстоятельств, необходимо прекратить полет до выяснения причин!
9. Если потребуется сделать несколько вылетов на один объект, то при разрядке батареи, приземлите коптер. Необходимо вынуть аккумулятор, плотно вставить новую батарею до щелчка и включить питание. Подождите не менее 2-х минут и взлетайте снова.
10. При смене аккумулятора, обращайте внимание на температуру разъема питания. Если разъем сильно нагрелся, не используйте данную батарею без технического обслуживания контактов.
11. После окончания каждого полета, на этапе посадки квадрокоптера, наблюдайте за световым индикатором приемника AGNSS (светодиод в переднем левом луче). Индикатор должен МОРГАТЬ ЗЕЛЕНЫМ. Если индикатор МОРГАЕТ или ГОРИТ КРАСНЫМ, это может сигнализировать о проблемах с записью спутниковых данных. Необходимо перезапустить квадрокоптер и повторить вылет еще раз.
12. После завершения полетов, выключите квадрокоптер и поисковый маяк. Затем, вашу базовую станцию.
13. Не летайте рядом с запретными зонами (аэропорты, стадионы, тюрьмы, посольства, воинские части, правительственные и силовые объекты, оборонные предприятия и т.д.).
Работа с поисковым маяком
На все наши геодезические квадрокоптеры, устанавливаются радиомаяки для поиска модели при нештатных ситуациях. Маяк подключается к GNSS антенне и может передавать координаты местонахождения коптера, а также возможен поиск методом “охота на лис”.
Маяк автоматически включается при включении квадрокоптера и заряжает свой встроенный аккумулятор для автономной работы в течение 14 дней. Если за это время маяк не будет выключен, он перейдет в спящий режим для предотвращения переразрядки встроенного аккумулятора.
Тем не менее, рекомендуем самостоятельно выключать маяк после полетов. Это позволит сохранить полный заряд встроенного аккумулятора и обеспечит максимальное время работы маяка в экстренной ситуации.
Выключение маяка производится удаленно, с помощью рации:
1. Поднесите рацию к коптеру.
2. В течение 7 секунд, пошлите тоновый вызов на частоте 1750Гц.
3. Маяк ответит обратным отсчетом: “три”, “два”, “один”.
4. Пока идет отсчет, нужно еще раз послать тоновый вызов на 3 секунды.
5. Маяк издаст звуковые сигналы и выключится.
Сбор полученных данных
Для начала обработки информации с геодезического квадрокоптера, вам необходимо следующее:
1. Скачать фотографии с карты памяти квадрокоптера.
2. Скачать ubx файл с приемника в квадрокоптере. Подключитесь к приемнику по Wi-Fi и в разделе Logging найдите необходимые файлы. Проверьте, что количество файлов ubx, равно числу включений дрона.
3. Скачать Rinex файл с базовой станции. Используйте подключение через Wi-Fi или прямое подключение в соответствии с руководством пользователя вашего оборудования.
4. Получить координаты опознаков и базовой станции.
Обработка полученных данных
Каждый *.ubx файл составляет около 8МБ для 20-минутного полета с GPS GLONASS 5 Гц.
Количество фотографий зависит от временного интервала между ними. Если интервал Ashot составлял 1,3 сек., то это 1000 фотографий. Если интервал был 1,8 сек., то это около 700 фотографий.
Для преобразования UBX в формат RINEX используйте бесплатное программное обеспечение RTK lib.
Для более полной обработки данных, без дополнительного ПО, используйте телеграм-бот TeoBox PPK Bot.
Обработка спутниковых данных в телеграм-боте TeoBox PPK Bot.
Для загрузки данных, откройте бота, введите команду /start, и следуйте дальнейшим инструкциям.
Вам понадобяться файлы с приемника квадрокоптера, с базовой станции и файл PRJ с параметрами системы координат.
На выходе вы получите TXT файл, который вместе с фотографиями с квадрокоптера, необходимо загрузить в программу Teobox. На выходе вы получите переименованные и упорядоченные фотографии а также CSV файл с координатами центров снимков. Далее эти файлы можно использовать в фотограмметрических программах.
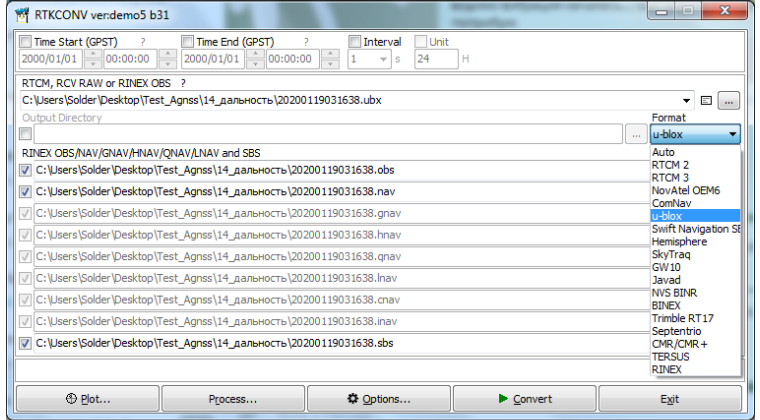
Конвертирование Ubx файлов с помощью пакета RTK lib.
Скачайте пакет RTK lib и запустите rtkconv.exe.
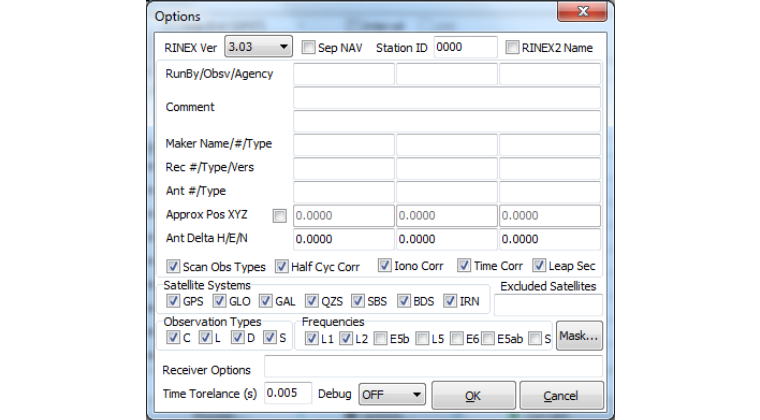
В верхнем поле, выберите нужный файл ubx. В меню Format выберите u-blox. Нажмите кнопку “Options…” и выполните настройки как на скриншоте ниже и нажмите “Ok”. Далее нажмите кнопку Convert.
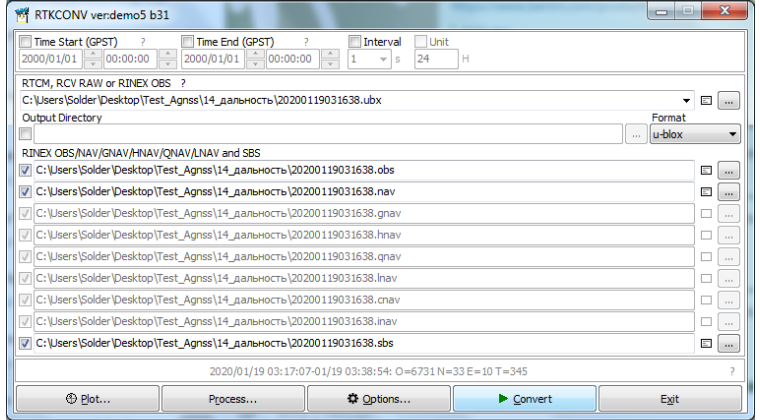
После конвертации, создадутся два файла *.obs и *.nav.
Проверка данных OBS
Если вы все сделали правильно, в нижней части окна RTK Conv появятся следующие строки:
0=… – наблюдение
N=… – эфемериды
T=… – количество временных меток
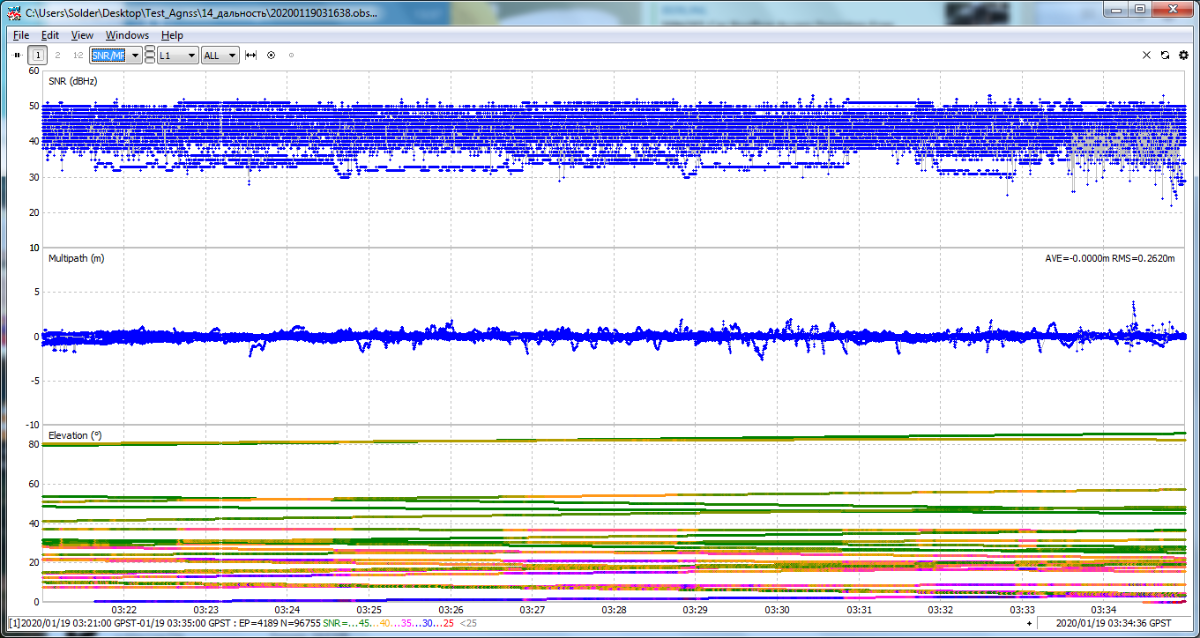
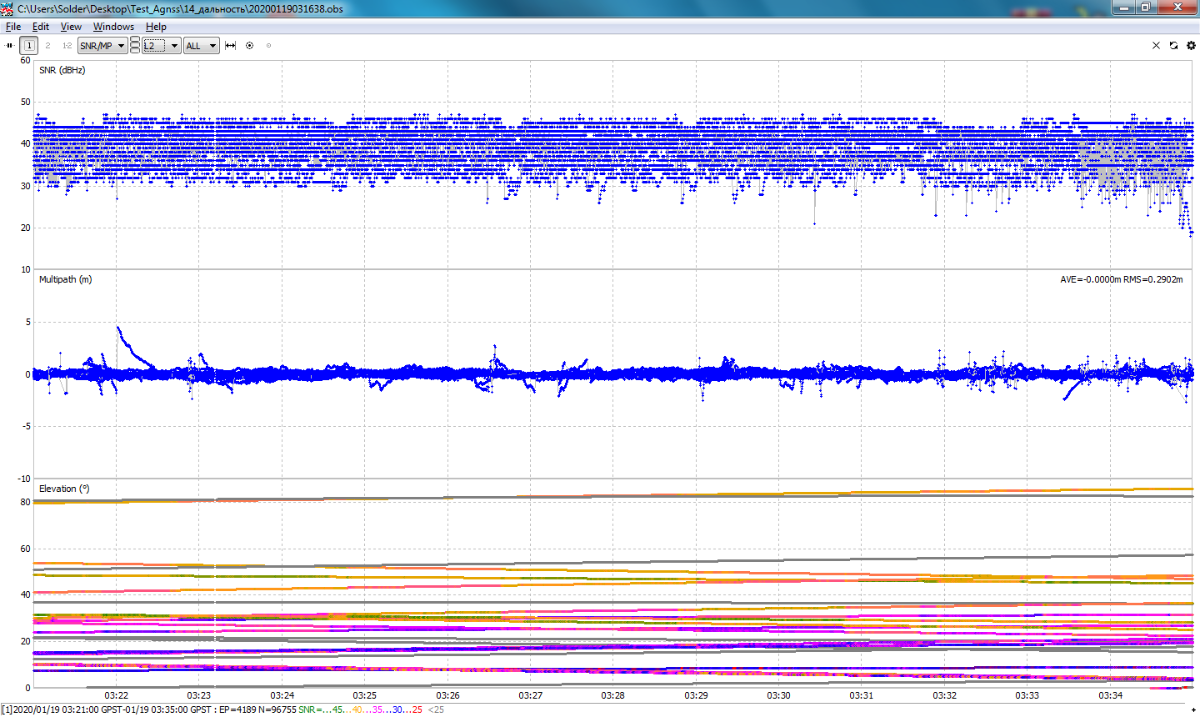
Чтобы убедиться в качественности измерений ГНСС, нажмите кнопку “Plot…”.
Откроется окно со спутниками, видимыми во время полета (см. скриншот).
Для хорошего результата в данных не должно быть пробелов и циклических сдвигов. Циклические проскальзывания происходят, когда сигнал GNSS блокируется, например зданиями.
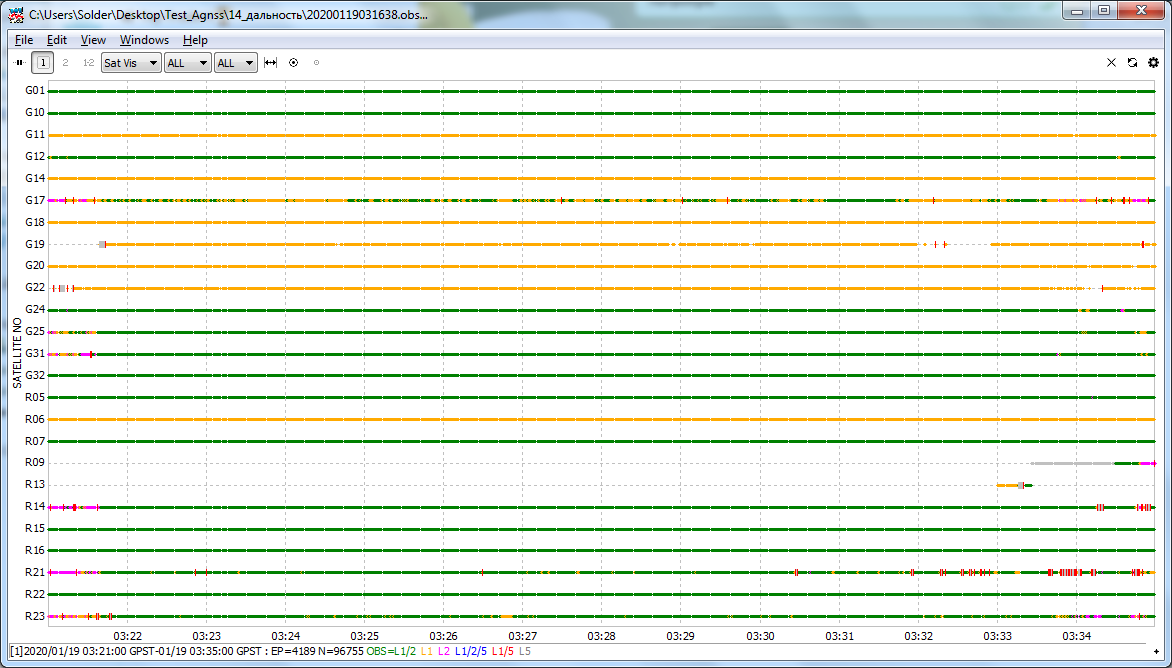
Если в выпадающем меню выбрать SNR/MP/EL (см. скриншот), то можно увидеть качество данных GNSS и наличие в них шума.
Для хорошего результата, SNR должен быть в диапазоне 30-50 дБ/Гц, и не должно быть никаких циклов скольжения.
Квадрокоптер dji phantom 3 se – последний фантом из 3й серии
Всем привет! Пишу свой первый обзор на MySku.
Фото сделаны на полу и на столе, и это ковролин, а не ковер =)
Еще в начале марта компания DJI, считающаяся законодателем моды на квадрокоптеры, в Барселоне на выставке MWC 2023 без лишнего шума и внимания прессы анонсировала новый дрон серии Phantom 3 — DJI Phantom 3 SE.
На текущий момент Phantom 3 SE является логическим продолжением DJI Phantom 3 Standard, но с учётом 2023 года на дворе, бюджетных решений в ассортименте производителя способных снимать видео в разрешении 4k нету. И я так думаю в связи с этим руководство DJI решило предложить своим клиентам новый дрон, который в одночасье имел бы ключевые «фишки» топовой в третьей серии модели DJI Phantom 3 Professional, но стоил бы при этом как базовая модель DJI Phantom 3 Standard. 
На текущий момент у производителя находится на продаже из линейки Phantom следующие дроны (я говорю о официальном магазине DJI в Китае): Phantom 4 Pro, Phantom 4 Advanced, Phantom 3 SE, Phantom 3 Standard. Восстановленные квадрокоптеры: Phantom 4, Phantom 3 Professional, Phantom 3 Advanced, Phantom 3 Standard.
В результате на свет появился Phantom 3 SE. При этом необходимо учесть, что Phantom 3 Advanced и Phantom 3 Professional больше выпускать не будут: на производственной линии останется лишь Phantom 3 Standard и новоиспечённый Phantom 3 SE. Чем же он выделяется на фоне своих предшественников и действительно ли DJI сделала его на много лучше чем Phantom 3 Standard?
Квадрокоптер поставляется в белой коробке с красной ручкой и изображением нашего красавца с обоих сторон. 
Далее нас встречает уже всем знакомая «яичная» коробка. Внутри все красиво разложено. 

Комплектация:
1 * Квадрокоптер DJI Phantom 3 SE
1 * Аппаратура управления
4 * Пары пропеллеров
1 * Интеллектуальная батарея 15.2V 4480mAh LiPo 4S
1 * Зарядное устройство 57W
1 * Шнур ЗУ, с китайской вилкой
1 * Набор инструкций на китайском (большее количество), английском языке
1 * Фиксатор подвеса камеры крышка объектива
4 * запасных силиконовых демпфера подвеса
1 * micro USB кабель
2 * запасных «стопора» подвеса
4 * запасных подушечки на шасси
1 * пинцет
5 * стикеров
Инструкцию прочитать хотя бы от Phantom 3 Standard, принцип работы у них одинаков. Они есть с переводом на русском языке, найти можно в сети.
Тело (туша) квадрокоптера:
Со стандартом изменений куча. Новые золотые стикеры на лучах, новый шильдик. Обновленная система позиционирования. Обновленные корпуса антенн в шасси. Обновленная камера. Другой фиксатор подвеса.
Самое главное что DJI Phantom 3 SE получил возможность съёмки видео в 4K вместо прежних 2,7К (далее буду сравнивать с Phantom 3 Standard). Максимальная дальность полёта была увеличена с 1000м FCC / 500м CE, до 4000м FCC / 3000м SRRC. Если в том же Phantom 3 Advanced она составляла около 2 км (по паспорту, могу ошибаться), у Phantom 3 Standard максимум после прошивки 1,5 км, то Phantom 3 SE у меня смог улететь примерно на 3,6 км.
Есть поддержка системы Vision Positioning System, которая прежде числилась особенностью лишь Phantom 3 Professional. С помощью Vision Positioning System маневрирование в закрытых помещениях и местах, где сигнал GPS недоступен, окажется плёвым делом. Теперь позиционирование еще будет более точнее добавился Глонасс, что доводит общее количество спутников до 20 штук!
Камера позволяет снимать в таких разрешениях как: C4K 4096×2160 24/25p, 4K 3840×2160 24/25/30p, 2.7K 2704×1520 24/25/30p, FHD 1920×1080 24/25/30/48/50/60p, HD 1280×720 24/25/30/48/50/60p с битрейтом до 60 Mbps.





Аппаратура управления (пульт):
Перетерпела лишь одно внешнее изменение. Заменен держатель мобильного устройства, на держатель нового образца. Позволяет установить планшет до 10″. И я так подозреваю что железки внутри тоже новые. Пульт заряжается через разъем micro USB около 2,5 часа. 



Пропеллеры:
Пропеллеры остались прежние, без изменений.
Зарядное устройство и кабели:
Здесь у нас ЗУ, сетевой кабель с китайской вилкой, кабель micro USB. ЗУ давно нам знакомо по ЗУ от DJI Phantom 3 Standard. Мощность 57W, заряжает батарейку за 1,5 часа. 


Аксессуары:
Находятся в отдельной коробочке с пакетиком. Здесь у нас: 4 * запасных силиконовых демпфера подвеса, 2 * запасных «стопора» подвеса, 4 * запасных подушечки на шасси, 1 * пинцет (нужен для удержания мотора при закручивании пропеллера).

Видео:
Вывод:
Будем надеяться, что позднее DJI Phantom 3 SE выйдет за пределы китайского рынка и будет продаваться официально. А слух о том, что Phantom 3 SE станет эксклюзивным предложением для китайского рынка окажется провальным. Так как на мой взгляд, дрон в такой комплектации и за такую цену имеет все шансы стать лакомой вишенкой на торту. Всем спасибо и огромной удачи с вашими будущими винтокрылыми питомцами =)
P.S.: Попросил продавца дать скидку в 5$. Пишите в комментарии к заказу перед оплатой «ruslan5» и продавец сделает скидку. Это не реферальная ссылка или купон. Я не получаю выгоды от продажи товара (прямой или косвенной). Указана прямая ссылка на страницу квадрокоптера.
Потеряна связь от передатчика к квадрокоптеру
Скорее всего он неправильно откалиброван. Установите беспилотник на ровной поверхности и разместите подкладку (сойдет картон или сложенная бумага) под луч, в чью сторону идет отклонение. После новой калибровки проблема должна исчезнуть. Если она все еще остается, возможно вашему квадрокоптеру все-таки требуется более серьезный ремонт.
Часто причина очень проста — ручка газа не стоит в положении минимум. Как вы понимаете, ремонт мультикоптера в данном случае не требуется. Все решается вами и достаточно быстро — установите ручку на себя до упора, устройтесь поудобнее и ждите полной инициализации квадрокоптера. Готово!
Если включение режима «эксперт» не помогает, то проверьте аккумулятор. Часто беспилотнику просто не хватает мощности для выполнения.
Это тот случай, когда вам как раз лучше сменить режим с «эксперта» на менее чувствительный. Если вы только приступили к управлению квадрокоптером, не беспокойтесь — не все сразу! По прошествии времени, когда вы лучше освоите управление, перейти на режим эксперта получится уже без особых проблем.
Часто это случается из-за того, что винты или двигатель установлены неправильно. Можно самостоятельно сравнить со схемой из руководства пользователя либо отнести беспилотник в сервис.
Самая печальная неприятность, которая часто означает потерю вашего летающего друга. Причины могут быть самыми разными, но способ предотвратить побег только один — установка GPS маячка.
Естественно, список на этом не заканчивается, мы указали только самые распространенные моменты. Кроме прочего, у каждой модели есть свои «болезни». Ремонт DJI Phantom, например, может потребоваться после падения даже с небольшой высоты, т.к. часто летит их слабое место — материнская плата.
Как мы все знаем, компания DJI делает качественные дроны в хорошем исполнении. Казалось бы от такого качества ремонта можно избежать на 100%. Но нет. Это вещь, и как любой другой вещи нужен уход. Собственно, квадрокоптеру тоже нужен уход. Основные поломки, которые у них могут встречаться – это:
- программные сбои и выход из строя;
- краши и падения дрона;
- следствия долгой эксплуатации;
- следствия износа;
- стики, на пульте управления не расположены по центру, а отклоняются;
- при получении SSID выдается ошибка;
- поломка камеры и других компонентов после падения;
- GPS навигация не срабатывает;
- падение дрона в воду;
- батарея не держит заряд и быстро садится;
- материнская плата повреждена, или ее отдельные компоненты;
- треснул или повредился пропеллер;
Если у вас есть поломка из списка выше, мой вам совет – делайте ремонт в сервисном центре или у частных мастеров. Не стоит этим заниматься самостоятельно, если вы в этом не разбираетесь.
В вашем городе наверняка есть такие люди, которые за небольшую плату произведут ремонт квадрокоптера DJI и у них наверняка есть необходимые детали и запчасти.
Если между машиной и ПДУ нет связи, в первую очередь проверяется пульт. Разряженный аккумулятор и севшие батарейки – распространенная причина отсутствия связи. Сигнализирует об отсутствии заряда в батарейках и загорающийся индикатор на коптере. В этом случае просто замените батарейку и оцените результат.
В некоторых случаях владелец аппарата неверно выполняет последовательность действий при запуске. Важно поэтапно и правильно соблюдать шаги, описанные в инструкции. К примеру: если на старте устройство лежит неправильно (на боку, перевернуто кверху вниз), оно не будет реагировать на пульт при команде подняться в воздух.
Если рекомендованные меры приняты, а аппарат по прежнему не видит пульт, проблема кроется внутри ПДУ. Возможно, нарушены контакты, имеется обрыв проводков. Иногда проблема решается чисткой контактов (в случае окисления батареек).
Неисправность, с которой приходится столкнуться почти каждому новичку. Винты запущены на полную мощь, а дрон не поднимается в воздух, не реагируя на ПДУ. Такое случается, если неправильно установлены пропеллеры. Не спешите нести технику в ремонт: сначала сравните маркировку на пропеллерах с маркировкой на лучах – совпадение знаков обязательно.
Возможно, случилась путаница: пропеллер, предназначенный для вращения по часовой стрелке, установлен на мотор, работающий против часовой стрелки (и наоборот). При неверном направлении винтов аппарат не взлетит. Поставьте пропеллеры в соответствии с маркировкой, и попробуйте запустить технику повторно.
Если при полете аппарат сносит в сторону, имеет место быть неверная калибровка. Чтобы решить проблему, поставьте квадрокоптер на ровную поверхность, подложив под отклоняющийся луч листы бумаги. Также подойдет и ровный лист картона. После повторной калибровки, как правило, проблема решается.
Если сваливание на бок после калибровки не прекратилось, а только уменьшилось, воспользуйтесь триммерами на пульте управления. Начинающие пользователи часто забывают о пилоте триммеров. Также, одна из распространенных ошибок у новичков — некорректная настройка гироскопа.
Отказ от взлета часто обусловлен неправильной установкой двигателя или винтов. Еще раз внимательно осмотрите маркировку каждой детали – если замечено несовпадение, проведите разбор и установку в соответствии со схемой в инструкции.

 (LiPo) - 94182PRO")





