

- Убедитесь, что перед калибровкой:
- Чтобы переназначить переключатели, выполните следующие действия:
- . Калибровка акселерометра
- . Калибровка компаса
- . Калибровка гироскопа
- . Полетные режимы
- . Отключение Safety Switch
- . Калибровка регуляторов
- . Настройка PID – регулятора
- Форматирование карты памяти
- Обновление прошивки Pixhawk
- Настройка Pixhawk
- Выбор рамы
- Настройка режимных каналов
- Калибровка пульта
- Аварийная посадка
- Безопасность перед вылетом
- Безопасность в полете
- Безопасность при подготовке к вылету
- Бесколлекторные моторы (brushless motors)
- Запланированная посадка
- Как подключить gps к pixracer клевер
- Настройка px4 для использования marker_navigator
- Общая картина подключений
- Подключение бесколлекторных моторов и регуляторов скорости
- Подключение приемников радиоуправляемых моделей
- Подключение сервомашинок
- Приемники р/у моделей (receivers)
- Регуляторы напряжения (esc)
- Сервоприводы
Убедитесь, что перед калибровкой:
- К коптеру не подключено внешнее питание АКБ
- Пропеллеры не установлены на моторах
- Заходим в меню Radio
- Включаем пульт, переводя переключатель Power в верхнее положение
Далее необходимо убедиться, что связь с приемником установлена:
- На ЖК Экране пульта высвечивается индикация

- Светодиод на приемнике горит непрерывно красным
При наличиии проблем с подключением щелкните
Чтобы переназначить переключатели, выполните следующие действия:
- Зайдите в МЕНЮ (удерживаем нажатой кнопку “ОК”)
- Выберите меню “Functions setup” (Кнопки Up/Down – для навигации, кнопка “ОК” – подтверждение выбора
- Выберите “Aux. channels”
- Выберите
- Channel 5 – SwC
- Channel 6 – SwA
- Сохраните изменения (удерживаем нажатой кнопку “CANCEL”)
. Калибровка акселерометра
- Заходим в меню Sensors > Accelerometer
Поскольку направление Pixhawk совпадает с носом БПЛА, то выбираем Autopilot Orientation: ROTATION_NONE
Кликаем OK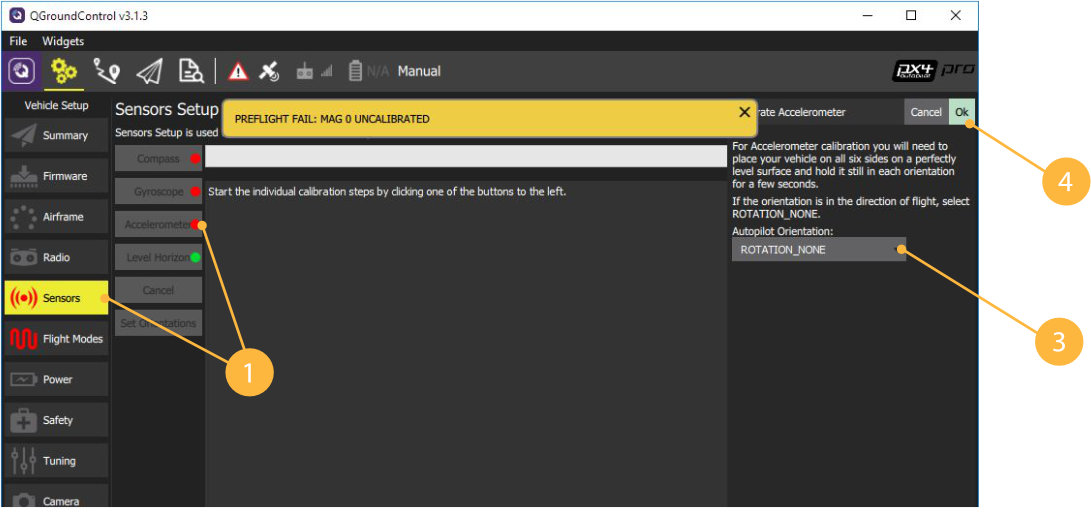
Начинаем калибровку:
Последовательно располагаем БПЛА как на картинках, когда Pixhawk захватит положение, вокруг картинки появится желтая рамка – удерживаем в этом положении БПЛА до переключения в зеленую рамку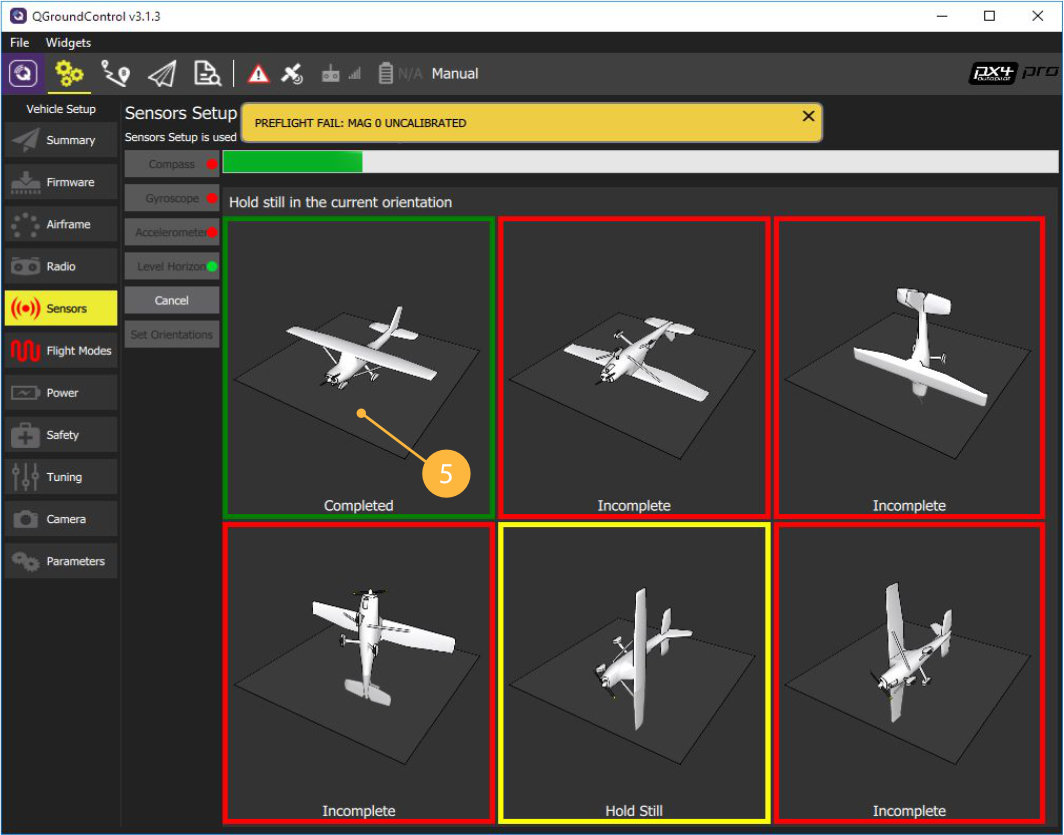
. Калибровка компаса
- Заходим в меню Sensors > Compass
- Поскольку направление Pixhawk совпадает с носом БПЛА, то выбираем Autopilot Orientation: ROTATION_NONE
Кликаем OK - Начало калибровки.
- Выбираем ориентацию БПЛА как на картинке и ждем, когда Pixhawk определит положение БПЛА, появится желтая рамка и надпись “Rotate”
- Вращаем БПЛА как на картинке до появления зеленой рамки – Pixhawk откалибровал компас по данной оси.
. Калибровка гироскопа
- Заходим в меню Sensors > Gyroscope
- Устанавливаем БПЛА на ровную поверхность и кликаем OK
Ждем окончания калибровки.
. Полетные режимы
- Заходим в меню Flight Modes
- Устанавливаем переключатель каналов на переключатель SwC (Channel 5)
Mode channel – Channel 5 - Переключая SwC, текущий режим подсвечивается желтым цветом.
- Назначаем полетные режимы:
- Flight Mode 1: Stabilized
- Flight Mode 4: Altitude
- Flight Mode 6: Hold
- Отображение текущего полетного режима
- Аварийное отключение моторов ставим на переключатель SwA (Channel 6).
Kill switch – Channel 6
. Отключение Safety Switch
В полетном контроллере PIXHAWK стоит защита моторов от случайного использования.
Чтобы разблокировать коптер, необходимо отключить кнопку безопасности
- Заходим в меню Parameters > Circuit Breaker
- Выбираем параметр CBRK_AIRSPD_CHK, устанавливаем максимальное значение параметра (оно указано в строке Maximum Value окна Parameter Editor)
- Сохраняем значения, кликая по кнопке Save
- Повторяем установку максимальных значений для всех параметров, кроме CBRK_RATE_CTRL и CBRK_VELPOSERR
. Калибровка регуляторов
- Заходим в меню Power
- Устанавливаем количество банок Number of cells – 4S
- Устанавливаем параметр Full Voltage (per cell) – 4.20V
Чтобы изменения сохранились, необходимо перезагрузить Pixhawk.
- Отключаем Pixhawk от USB
Подключаем Pixhawk к USB снова
Проверяем, что АКБ не подключена и пропеллеры сняты
Нажимаем Calibrate
. Настройка PID – регулятора
Если во время полета, квадрокоптер имеет осцилляции (колебания) и в связи с этим не может корректно летать, то необходимо провести
По умолчанию для квадрокоптера Клевер 2 используются следующие коэффициенты:
- Заходим в меню Parameters > Multicopter Attitude Control
Устанавливаем выделенные значения параметров ПИД регулятора для углов Roll и Pitch:
MC_PITCHRATE_P: 0.145
- MC_PITCHRATE_I: 0.050
MC_PITCHRATE_D: 0.0025
MC_ROLLRATE_P: 0.145
- MC_ROLLRATE_I: 0.050
- MC_ROLLRATE_D: 0.0025
Форматирование карты памяти
- Устанавливаем карту памяти microSD в адаптер
- Форматируем карту в файловую систему FAT32
правый клие на диске > Форматирование - Выполняем “Безопасное извлечение” карты напанели инструментов, далее извлекаем карту
- Устанавливаем micrSD карту в полетный контроллер Pixhawk.
Обновление прошивки Pixhawk
- Заходим в Vehicle Setup.
- Выбираем Firmware.
- Отключаем Pixhawk от USB. Подключаем Pixhawk к USB снова.
- Ждем подключения Pixhawk, выбираем прошивку PX4 Flight Stack и активируем Advanced settings.
- Выбираем тип прошивки Standard Version (stable). Если загружать собственную прошивку/ прошивку внешним файлом (например, скачанную из интернета), то выбираем Customize из выпадающего меню.
- Кликаем OK.
- Отключаем Pixhawk от USB.
- Подключаем Pixhawk к USB снова.
Настройка Pixhawk
- Системы, нуждающиеся в настройке: Airframe, Radio, Sensors, Flight Mode
- Текущая прошивка контроллера.
- Текущий полетный режим.
- Сообщения об ошибках.
Выбор рамы
- Заходим в меню Airframe.
- Выбираем тип рамы Quadrotor X.
- Выбираем тип навесных элементов Generic Quadrotor X config
- Перемещаемся в начало списка и сохраняем настройки Apply and Restart
- Повторно подтверждаем Apply
- Ждем, пока Pixhawk выполнит сохранение и перезагрузится
Настройка режимных каналов
Каналы CH5 и CH6 необходимы для настройки полета коптера.
На канал CH5 назначаем 3-х позиционный переключатель SwC – будем изменять полетные режимы
На канал CH6 назначаем 2-х позиционный переключатель SwA – аварийная остановка моторов
Калибровка пульта
Начинаем процедуру калибровки
- Нажимаем кнопку Calibrate
- Устанавливаем триммеры Throttle, Yaw, Pitch, Roll в 0.
- Триммеры позволяют задавать смещение коптеру.
- Чтобы установить один из триммеров в 0, необходимо на пульте переместить указатель в центр до длительного звукового сигнала (писка)
- Жмем ОК
- Переводим Левый стик (газ) (throttle) в минимум и кликаем Next
- Калибровка каналов управления (throttle, yaw, pitch, roll).
Повторяем движения стиками вслед за анимацией и читаем подсказки. - Калибровка переключателей.
При появлении надписи Move all transmitter switches and/or dials back and forth to their extreme positions переключаем SwA..SwD, VrA, VrB в их конечные положения.
Кликаем Next Сохранение параметров.
При появлении надписи “All settings have been captured. Click Next to write the new parameters to your board”
Кликаем NextКалибровка пульта завершена!
Аварийная посадка
В случае удара об землю или жесткой посадки выполнить следующие действия:
- Прекратить полёт. Посадить коптер на землю. Левый стик (газ) в минимум
- Disarm (Левый стик влево-вниз на 3 секунды)
- Отключить Li-ion аккумулятор на коптере.
- Выключить пульт.
- Осмотреть коптер и при необходимости отремонтировать.
Безопасность перед вылетом
- Располагать зрителей за спиной пилота или за линией, проходящей через оба плеча пилота за спиной пилота.
- Не допускать выхода зрителей в полусферу перед лицом пилота.
Знать и помнить время полёта, на которое рассчитан данный коптер и его аккумулятор.
ДО подключения Li-ion аккумулятора включить аппаратуру управления (пульт), перевести левый стик (газ) в нулевое положение.
- Подключать Li-ion аккумулятор только перед взлётом, отключать сразу после взлёта.
- Стоять на расстоянии не менее 3 м от коптера.
Взлетать с земли с ровной площадки, на расстоянии не менее 3 метров от препятствий.
Безопасность в полете
Выполнять все указания преподавателя или лётного инструктора.
- Заранее обозначить зону пилотажа. Летать только в обозначенной зоне и не допускать вылета за её пределы. Не залетать за собственную спину.
- При обучении полётам летать на уровне ниже собственного роста.
- Летать рядом с собой на расстоянии, на котором вам видна ориентация коптера в пространстве. Не улетать далеко от себя. В случае сомнений в ориентации коптера немедленно выполнить посадку на месте. Не пытаться взлететь. Подойти ближе к коптеру и выполнить взлёт.
- При управлении все движения стиками выполнять аккуратно и плавно. Не допускать резких движений. При необходимости изменить направление полёта двигать стиками следует энергично, но не резко.
“РЕЗКИЕ движения стиками ЗАПРЕЩАЮТСЯ. Движения стиками В КРАЯ ЗАПРЕЩАЮТСЯ.”
- Летать следует осторожно и выполнять только те элементы, в которых нет сомнений. Запрещается выполнять фигуры пилотажа, в успехе которых возникают сомнения и фигуры, связанные с риском.
- Соблюдать скоростной режим. Скорость полёта коптера держать в пределах скорости идущего человека.
- Вернуть коптер к месту посадки к рассчитанному времени, не допускать полной разрядки аккумулятора в полёте.
- Посадку выполнять только на ровную открытую площадку вдали от препятствий
Безопасность при подготовке к вылету
- Убедиться, что Li-ion аккумуляторы заряжены.
- Убедиться, что батарейки в аппаратуре управления заряжены.
- Устанавливать пропеллеры только перед вылетом.
- Проверить надёжность следующих узлов:
- Затянутость гаек пропеллеров.
- Крепление и целостность защит винтов.
- Надежность крепления проводов, отсутствие болтающихся проводов.
Бесколлекторные моторы (brushless motors)
В микровертолетах обычно стоят коллекторные моторы, т. е. моторы с щетками и коллектором. При всей их простоте, у них один огромный недостаток – ограниченный ресурс. Щетки подгорают и перетираются и рано или поздно выходят из строя. У бесколлекторных моторов щеток нет, а кроме того значительно выше КПД, но они требуют использования обязательного электронного узла – регулятора скорости (ESC – Electronic Speed Controller, его еще называют “контроллер”), который контролирует вращение электрического магнитного поля своевременно подавая напряжение на соответствующие обмотки мотора.
Регулятору бесколлекторного мотора необходимо знать положение ротора в каждый момент времени, для этого могут использоваться либо встроенные в мотор датчики, либо импульсы обратного электромагнитного поля (кстати, именно поэтому каждому б/к мотору требуется свой собственный регулятор).
Моторы без датчиков проще по конструкции, поэтому в р/у моделях в основном используется второй вариант – контроллер рассчитывает положение ротора на основе времени между импульсом напряжения питания и импульса обратного электромагнитного поля и использует эту информацию для определения фазы и того куда подать следующий импульс напряжения питания.
Регулирование скорости вращения мотора происходит с помощью изменения продолжительности импульса питания (широтно-импульсная модуляция) – более длительная серия импульсов создает большее магнитное поле, которое заставляет ротор вращаться быстрее, что вынуждает контроллер увеличивать частоту подачи импульсов.
Со всем вышесказанным связано еще два немаловажных понятия – тайминг регулятора и срыв синхронизации бесколлекторного мотора. Тайминг – это нечто вроде выставления угла зажигания в карбюраторных двигателях. Он определяет сдвиг фазы подачи питания на мотор.
Регуляторы обычно позволяют настроить тайминг выбором из нескольких значений. Для каждого мотора и условий его эксплуатации оптимальный тайминг может быть разным. Обычно его определяют по максимальной эффективности работы мотора в его рабочем диапазоне оборотов.
Иногда может возникнуть такая ситуация, когда из-за резкого изменения нагрузки или оборотов мотора, регулятор может “упустить” данные о действительном положении ротора и заблокировать подачу питания на мотор, такое явление называется срывом синхронизации. Вероятность этого повышается при неправильно выставленном тайминге. В этом случае придется перезапускать мотор заново.
По исполнению моторы бывают инраннерами (inrunner) и аутраннерами (ourunner), в инраннерах постоянный магнит закрепленн на вращающемся роторе, в аутраннерах – на вращающемся колоколе, т. е. в аутраннерах вращается внешняя часть мотора. Поскольку аутраннеры в силу своей конструкции позволяют использовать большее число магнитных полюсов, то они развивают больший крутящий момент и позволяют обходиться без редуктора, поэтому они больше распространены для р/у моделей.
Кроме габаритов и мощности, у мотора есть еще одна важная характеристика – kV. Так принято обозначать коэффициент отношения частоты вращения оборотов мотора (об/мин) к напряжению питания мотора (В). Грубо говоря kV показывает насколько быстро будут вращаться разные моторы при одинаковом напряжении.
 Несколько типичных аутраннеров
Несколько типичных аутраннеров
Обычно б/к моторы продаются с крестовиной крепления и адаптером для пропеллера, но иногда комплектация более скудная.
Запланированная посадка
После запланированной посадки выполнить следующие действия:
- Disarm (Левый стик влево-вниз на 3 секунды)
- Отключить Li-ion аккумулятор на коптере.
- Выключить пульт.
Как подключить gps к pixracer клевер
Сборка Клевера 3
В данной инструкции рассматривается сборка комплекта COEX Clever 3 с платой регуляторов 4в1.

Caution Перед использованием паяльного оборудования обязательно ознакомьтесь с техникой безопасности при пайке.


Закрепить мотор на луче шестигранными винтами М3х6 (самые короткие винты в комплекте с моторами).
Шестигранный ключ в комплекте.
Вставить гайки М3 (4 шт) в пластиковый держатель.
Для удобства можно использовать длинный винт, либо плоскогубцы
Закрепить луч, нижнюю защиту луча и держатель винтами М3х12, используя крестовую отвертку.
Скрепить хомутом луч и нижнюю защиту луча.
Хвост от хомута (стяжки) отрезать ножницами.

Монтаж каркасных элементов
- Установить пластиковые гайки М3 (4 шт) для крепления PDB на раму винтами М3х8.
- Установить стойки 6 мм (4 шт) для крепления Raspberry Pi на раму винтами М3х8.
- Установить на раму собранную конструкцию, соблюдая схему, винтами М3х16.
- Установить каркас для светодиодной ленты, используя прорези в держателях для ножек.

Монтаж преобразователя напряжения BEC (припаять и проверить)
Распаковать плату питания и установить шлейф питания.
Включить мультиметр в режим измерения постоянного напряжения (диапазон 20В или 200В).
Проверить работоспособность платы питания, подключив АКБ
- Выходное напряжение на разъеме XT30 должно равняться напряжению на АКБ (от 10В до 12.6В).
- Выходное напряжение на шлейфе питания должно быть в пределах 4.9В до 5.3В.
- Измеряем между черным и красным проводами.
Распаковывать преобразователь напряжения и снимаем прозрачную изоляцию.
Припаять два дополнительных провода на BEC
Взять из набора 3 провода папа-мама (красный, черный и любого цвета)
Красный и черный залудить с обеих сторон, используя пинцет. На синем проводе залудить со стороны коннектора ПАПА.
- Нанести флюс на оголенную часть провода.
- Покрыть припоем.
Припаять красный и черный провода к BEC:
Проверить работу BEC.
Припаять BEC на плату питания:
Подключить АКБ и проверяем напряжение на припаянных проводах к BEC (из пункта 5).
5В — все правильно!
больше 10В — отключите питание и переставьте желтую перемычку на другой пинцет.
0В — плохо спаяли.
Если BEC выдает 5В, то изолируем паячное соединение черной термоусадкой.
Монтаж светодиодной ленты.
Припаять провода от BEC (из пункта 5) к светодиодной ленте.
Удалить силиконовый слой на ленте (надрезать ножом и оторвать).
Залудить контакты светодиодной ленты.

Монтаж 4 отдельных регуляторов
Залудить три контактные площадки регулятора
- Нанести флюс
- Нанести припой
Чтобы припой аккуратно заполнил всю площадку, необходимо прогреть площадку регулятора. Для этого нужно удерживать жало паяльника на контактной площадке в течение 2 сек (или больше, если потребуется)

- Повторить данную операцию для оставшихся трех регуляторов
Припаять провода моторов к регуляторам
Припаять ранее приготовленные провода моторов к контактным площадкам регуляторов.

- Повторить данную операцию для оставшихся трех регуляторов
Монтаж платы регуляторов 4в1 и платы питания PDB
Установить плату регуляторов 4в1, как показано на картинке.
Соединить фазные провода моторов с проводами регуляторов.
Закрепить плату регуляторов стойками 6 мм (4 шт.).
На стойки накрутить пластиковые гайки М3 (4 шт.).
Установить плату распределения питания PDB, как показано на картинке (разъем XT60 направлен к хвосту коптера).
Соединить разъемы питания платы питания и платы регуляторов XT30.

Сопряжение приемника и пульта
Подключить провод 5В от BEC в разъем приемника.
Установить BIND разъем в крайний правый порт B/VCC.
Подключить АКБ. Индикатор на приемники должен быстро мигать (режим сброса).
Зажать и удерживать кнопку BIND на пульте и включаем пульт.
На пульте отображается процесс сопряжения RXBinding
После установки сопряжения (появление допю строк на дисплее пульта):
- Убрать BIND разъем из приемника.
- Отключить АКБ.

Hint Если пульт не включается или заблокирован, см. статью неисправности пульта.
Проверка направления вращения моторов
Убедиться, что PPM в меню RX Setup отключен (раздел «Нет связи с полетным контроллером»)
В пункте 3 выберите “RX setup” > “PPM OUTPUT” > “Off”.
Сохраните изменения (удерживаем нажатой кнопку “CANCEL”).
Подключить оранжевый провод S1 от платы регуляторов в CH3 на приемнике. Подключить внешнее питание.
Подать левым стиком газ (throttle) на 10%.
Проверить направления вращения мотора по схеме.Повторить для каждого мотора. Таким образом, будет понятно каким именно мотором мы управляем.
Если необходимо изменить направление вращения, то меняем любые два фазных провода мотора (нужно переподключить).

Монтаж и подключение полетного контроллера Pixracer
Установить Полетный контроллер Pixracer на двухстороний скотч 3М (2-3 слоя). Также полетный контроллер можно извлечь из корпуса и жестко установить на стойке М3х6.
Установить стойки 40 мм, используя винты М3х87.
Подключить разъем POWER.
Подключить регуляторы, как на картинке.
Подключить шлейф радиоприемника в разъем RCIN в Pixracer.

Установить Raspberry на стойки, используя монтажные отверстия Raspberry.
USB-разъемы направлены к хвостовой части коптера.
Установка шлейфа для камеры:
- поднять защелку;
- подключить шлейф;
- закрыть защелку.
Подключение питания Raspberry:
Сборка маунта для камеры RPi.
Используйте винт М3х16 и гайку М3

Монтаж Arduino и радиоприемника FlySky
Произвести монтаж пинов микроконтроллера Arduino Nano, используя пайку.
Установить миконтроллер в специальной маунт и прикрепите к нижней деке, используя винты М3х16 (4 шт.).
Используя 2хсторонний скотч, прикрепить приемник, как показано на рисунке.
Подключить шлейф радиоприемника от Pixracer как на рисунке.

Монтаж камеры RPi
Установить маунт для камеры RPi в сборе на нижнюю деку винтами М3х12 (2 шт.).
Подключить шлейф к камере RPi.
Установить камеру в маунт, закрепить саморезами М2.
Закрепить Raspberry стойками 30 мм (4 шт.).
Установить нижнюю деку в сборе на стойки винтами М3х8 (4шт.)
Установить ножки в маунты (4 шт.).

Монтаж остальных конструктивных элементов
Установить нижней защиты, используя винты М3х12 (8 шт.) и стойки 30 мм (8 шт.).
Установить верхней защиты, используя винты М3х12 (8 шт.).
Установить ремешок в верхнюю деку для фиксации АКБ.
Закрепить верхнюю деку винтами М3х8 (4 шт.)
Тема раздела Коптеры. Комплектующие, сборка, настройка. в категории Квадрокоптеры и мультироторы; На гитхабе исходники блхели,если вам интересны алгоритмы, вам туда. Да и прошивки бетафлай и айнав там же.
На гитхабе исходники блхели,если вам интересны алгоритмы, вам туда. Да и прошивки бетафлай и айнав там же.
Мне точно не туда, а сюда. Интересны принципы, а не сами алгоритмы, если вы их не знаете — то то что вы говорите про всякие мифические сверхточности похоже на фантазии.
Я пока не слышал, что бы полетник как либо учитывал данные датчиков тока и телеметрии от регуляторов. Когда я смотрел описание, там везде было указанно — для будущего использования. Поэтому если вы не знаете как это работает — интересует на чем построены ваши утверждения.
Там нет алгоритмов, только прошивки и проги.
1.
С точки зрения техники, механики это просто ужас.
Во-первых, силовые токи рядом с чуткой электроникой. И ладно это на ЕСК, где он просто дополнительно греет плату и нехило. Так это же ПК где гиры, аксели, компас и т.д. Да и сам проц вряд-ли в восторге.
Во-вторых. Это же просто толстый провод, который не согнуть на коротком расстоянии, а значит он механически каждый раз ломает плату, где просто куча многослойных линий.
Да, и если понадобится виброразвязка, то можно просто забыть. Для мелких это не критично, а вот для больших уже криминально.
Конечно, можно не паять, тогда обидный балласт.
Всем привет. Такая проблема непонятная. Коптер в стабилизации летает отлично и в лоитере висит. В авто летает отлично. Прихожу на следующий день. В стабилизации и в лоитере норм. Включаю авто режим. То чуть отлетает и зависает в точке, то отлетает набирает высоту и тоже зависает. В авто не летит совсем. Спутники есть компасы вкл, откл, внутренний и калибровал все. Не понятно почему один раз летит, другой нет. Еще в это время появляется ошибка error compass variance. Прошивка 3.4.0. Pixhawk и gps оригинал.
Когда технически грамотно сможете объяснить им зачем это надо.
В принципе дшот использовать можно, если кто-то догадается изобрести что-то более значимое, чем просто гон частоты.
Ну я приблизительно это и имел ввиду )))))
Слышим звон.
Не знаю какой у вас там звон, но факт есть факт. Новая техника надежнее и проще в настройке.
А люди то летают на гоночных квадриках, у которых все в одном, наслаждаются точностью управления, не вникая в ваши выдуманные проблемы.
Если что я писал про моторы всех классов.
Если есть идеи чем заменить этот «транспорт», предлагайте.
Для понимания, я за прогресс обеими руками, но я не в восторге от очкавтирательства под видом прогресса. Конечно шелуха нужна, чтобы методом отбора найти реальное.
Я даже готов предложить идеи для этого прогресса, только маркетингу это не надо. Нужно только красивое, чтобы быстро продавалось.
.
Не стоит в одну кучу валить коптеры разных классов и задач.
Если что, все читаемо.
Если Вам понравилось что-то больше правильнее обсуждать это в соответствующей теме, чем пытаться писать лишнее. У всех есть свои проблемы и каждый выбирает сам что ему надо.
Факт, что кроме маркетинговых фраз, ничего технически грамотного вы объяснить не можете.
Выдуманные сказки про повышенную точность управления благодаря обратной связи, мы тут слышим только от вас.
Возьмите за привычку знать предмет, прежде чем надувать щеки.
На рейсерских регулях я летал, когда вы еще на форуме не зарегистрировались. Поэтому бабушке своей можете рассказывать про новое железо.
То что Ардукоптер не включил поддержку новых протоколов, значит что это не влияет на качество управления по их мнению. Если вы не можете аргументированно доказать обратное — не засоряйте эфир. И не надо нам обьяснять, что новые регули лучше старых, это ежу понятно, вот только протоколы управления — это другая история.
для больших аппаратов 250мм и более превосходно работают стандартные ардушные контроллеры, при умелых руках и здравой голове совершенно нормально настраиваются.
поэтому то что на 500 раме что то там у вас не получилось либо результат «кривых рук» либо умышленное желание вбросить в тему говнеца
В регуляторах с blheli32 есть обратная связь. Вeшается на свободный uart. С регулятора выдаются такие параметры, как скорость вращения, потребляемый ток, температура. Эти параметры можно вывести на OSD, а вот используются ли они полетным контроллером как то еще, я не уверен. Гуглится эта информация по фразе betaflight esc telemetry
Единственное реально полезное, что там можно мониторить — это температуру. И то, это актуально только для рейсеров с перегрузками. Для больших вся эта телеметрия — козе гармошка.
ну и что вам даст рпм?
совершенно бесполезная информация для обычных полетов.
температура, обороты и ток параметры полезные для протоколирования в «черном ящике», для разбора причины отказа
обратная связь регулей с полетником как раз более востребована на крупных и дорогих аппаратах
изначально пикс и подобные имеют на борту канбас порт, предназначенный для коммуникации с бортовыми устройствами втч с регулями с обратной связью
но видимо сделать сами регули с совместимым каном так руки и не дошли
да, для логов — отлично, но не на ОСД смотреть
кстати, могут теперь добавить логирование регулей

Служба поддержки: 7 495 545-4883
Добро пожаловать
Обзор камеры

Руководство пользования
1. Подключите устройство к адаптеру питания
2. Скачайте приложение “Clever Dog” в App Store или Google play и установите .
3. Пройдите авторизацию. (Вход: для регистрации входа используйте ваш адрес электронной почты )


4. Добавление устройства в мобильный телефон.
1) Удостоверьтесь что индикатор WIFI мигает синим. Если нет, зажмите кнопку wifi на пару секунд пока индикатор не начнет мигать
2) Система ANDROID: в Clever Dog【 Главная страница 】, нажмите “ ” для поиска устройства

Шаг 1: через 【 Настройки 】 > 【 WLAN 】 на вашем iPhone, подсоединитесь к DOG -00****


Шаг 2: откройте Clever Dog 【 Главная 】, нажмите “ ” для поиска устройства
1) В 【 Поиск устройства 】 выберите CID устройства
2) В 【 WIFI 】 подключитесь к WiFi которую вы выбрали, и нажмите Следующий


3) Подключитесь к сети когда индикатор Wifi мигает красным, это займет около минуты, ожидайте…
WIFI индикатор загорится синим цветом, это означает что подключение прошло успешно.
6. Устройство добавлено! Приступайте к использованию!


Индикатор статуса светодиодов
Настройка px4 для использования marker_navigator
Для полетов по полю маркеров убедиться, что:
- SYS_MC_EST_GROUP = local_position_estimator
- В LPE_FUSION установлены только vision position, vision yaw, land detector. При желании, можно включить Baro (барометр).
- Выключен компас: ATT_W_MAG = 0
- Включена ориентация по Yaw по зрению: ATT_EXT_HDG_M = Vision
Общая картина подключений
Ну, надеюсь с подключениями этих устройств все более-менее ясно. В целом, получается что-то вроде этого:
 Подключение регулятора, мотора, сервы и приемника
Подключение регулятора, мотора, сервы и приемника
Длинная статья получилась и занудная, все равно всего не получается охватить, но надеюсь что общее представление мне удалось раскрыть.
Подключение бесколлекторных моторов и регуляторов скорости
Регулятор скорости подключается к б/к мотору тремя проводами. Последовательность соединения не имеет значения, но если мотор вращается не в ту сторону, в которую вам требуется, то нужно просто поменять местами любые 2 провода. В качестве соединительных разъемов обычно используются разъемы типа “Gold Bullet Banana Connector”, они бывают разных диаметров.
 Набор разъемов Gold Bullet 3,5мм
Набор разъемов Gold Bullet 3,5мм
Подключение остальных проводов регулятора скорости вопросов вызывать не должно – разъем с “фишкой” подключается к требуемому каналу приемника, по этому разъему регулятор получает информацию для управления скоростью вращения двигателя, а если в нем встроенный стабилизатор, то через этот разъем он также питает приемник.
Сам регулятор запитывается от аккумулятора (обычно там голые провода, поэтому надо припаять разъем питания, например, XT-60). Современные регуляторы умеют автоматически определять количество банок аккумулятора, так что этот параметр обычно настраивать не требуется).
Естественно, диапазон входного напряжения регулятора не безграничен и обычно указывается в его характеристиках. Самые распространенные регуляторы могут работать с аккумуляторами с количеством банок от 2 до 6. Регуляторы рассчитанные на большее количество банок как правило стоят значительно дороже, т. к. именно на 25В проходит граница между сравнительно дешевыми и более дорогими полевыми транзисторами.
Есть один очень важный момент по подключению регулятора, который возможно не все знают – удлинять провода регуляторов не рекомендуется. Если вам все же никуда не деться от удлинения, то: 1. Лучше удлинить провода от контроллера до мотора, 2. Желательно использовать провод большего сечения, чем стоит на регуляторе.
Дело в том, что при удлинении проводов от контроллера до батареи начинает сказываться их индуктивность и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и “повисает” процессор контроллера).
Известно несколько случаев полного “выгорания в дым” контроллеров, при удлинении проводов со стороны аккумулятора до 30см. В то же время, при удлинении проводов от контроллера до мотора всего лишь слегка сдвигается задержка тайминга контроллера. Чем больше напряжение от которого питается регулятор, тем более критичен он к удлинению проводов.
Как резюме
В случае крайней необходимости можно удлинить провод от регулятора до аккумулятора, если сделать это проводом толстого сечения и чтобы итоговая длине в любом случае не превышала 20 см. В остальных случаях лучше удлинять провода на мотор и без лишней необходимости это не делать.
Подключение приемников радиоуправляемых моделей
 Bind Plug и разъемы приемника AR6100e
Bind Plug и разъемы приемника AR6100e
Ничего сложного здесь нет. Возьмем для примера шестиканальный спектрумовский приемник AR6100E. У него есть 7 разъемов по 3 контакта. 6 разъемов – это выходы на каналы, они промаркированы в соответствии с общепринятой маркировкой каналов – Thro (Газ), Aile (Элероны)
, Elev (Элеватор), Rudd (Руль), Gear (Шасси, 5 канал), Aux1 (6 канал). Выводы каналов тоже промаркированы как “-“, ” ” и управляющий сигнал. Соответственно к каждому из каналов можно подключить сервопривод, либо регулятор напряжения бесколлекторного двигателя, либо еще какую-нибудь электронику и она будет питаться от плюса с минусом и контролироваться управляющим сигналом.
Седьмой разъем обычно помечен как Batt и служит для подачи питания на приемник (если оно уже не подается через какой-нибудь другой разъем), а также для переключения приемника в режим “Bind”, т. е. для процедуры привязки к пульту. Для переключения в этот режим при включении приемника управляющий контакт разъема Bat должен быть замкнут на землю, обычно для этого втыкается специальная перемычка – “Bind Pug”.
В приемниках с поддержкой телеметрии, этот разъем также используется для связи с модулем телеметрии. Питание на приемник может подаваться через любой из разъемов ” ” и “-“, т. к. они все между собой просто-напросто соединены внутри приемника. Точно так же электронные устройства получают питание с приемника – он никак не регулирует напряжение, он просто напрямую передает питание через свои разъемы, соответственно особых ограничений по току здесь нет, но будут ограничения если вы решите подключить какой-нибудь потребитель питания (например, светодиодную подсветку) непосредственно к управляющему сигналу.
Что касается маркировки проводов подключаемых к приемнику устройств, то здесь мне попадалось пока 2 “стандарта” желтый/красный/коричневый и белый/красный/черный, сигнальный провод – желтый или белый.
Подключение сервомашинок
При подключении серв надо учитывать, что некоторые сервы рассчитаны на работу от повышенного напряжения и питание их от встроенного стабилизатора не позволит им развить полную заявленную мощность. Другая сторона вопроса, что если модель большая и на ней стоят мощные сервы, то максимального тока отдаваемого стабилизатором контроллера может не хватить для их работы, появляется риск просадки напряжения, что очень чревато для работы приемника, поэтому при использовании мощных серв необходимо в обязательном порядке просчитывать их аппетиты и возможности стабилизатора, а еще лучше замерять все это на практике, либо организовывать отдельную линию для питания приемника.
Так же, насколько я слышал, иногда бывают проблемы совместимости некоторых цифровых серв с некоторыми гироскопами, этот момент нужно также учитывать.
Приемники р/у моделей (receivers)
Поскольку у меня в хозяйстве в основном семейство Spektrum, то и рассказывать я буду исключительно про приемники DSM2/DSMX. У спектрума есть достаточно много моделей приемников различающихся количеством каналов, массой и возможностями. По размерам и дальности приема они делятся на классы: ultra micro – для ультра-микро моделей самолетов, нередко это приемники со встроенными сервами; паркфлайерные модели – приемники без сателлитов с небольшим радиусом приема (грубо говоря для самолетов которым хватает для полета небольшой лужайки); а также приемники рассчитанные на полноценную дальность.
Последние обычно рассчитаны на использование с “сателлитами” – маленькими дополнительными приемниками, которые подключаются к основному чтобы обеспечить пространственное разнесение антенн. Приемники с сателлитами есть не у всех фирм. Например, Futaba, насколько я знаю, принципиально не использует сателлиты, выезжая на лучшей помехозащищенности при кодировании сигнала.
Тем не менее, пространственное разнесение антенн – эффективный и сравнительно простой способ увеличить дальность приема. Основное предназначение сателлитов – избежать затенения сигнала материалом корпуса модели, поэтому основной приемник и сателлит размещаются в разных местах модели и желательно под углом друг к другу, а приемник просто берет лучший из двух сигналов в каждый момент времени. Для моделей с полностью карбоновыми корпусами есть специальные типы приемников с выносными модулями для крепления снаружи.
Некоторые спектрумовские приемники также имеют разъемы для подключения модуля телеметрии. Блок телеметрии использует собственный передатчик для отправки на пульт данных с подключенных датчиков – это могут быть уровень сигнала приемника, напряжение батареи, температура, обороты двигателя и т. д.
Также на приемнике обычно имеется лампочка-индикатор показывающая своим миганием или горением текущее состояние связи с пультом.
Несмотря на простоту исполнения, стоимость оригинальных приемников обычно немаленькая. К счастью, на помощь в очередной раз пришли китайцы и наклепали своих версий под самые разные протоколы. Для Спектрумовского DSM2, это Хоббикинговские приемники OrangeRx – шестиканальный OrangeRx R610, легкие четырехканальные R410 и R415, семиканальный OrangeRx R710 и девятиканальный R910; ну и сателлит к ним:
 Оригинальный приемник Spektrum AR6100e и его китайский клон OrangeRX R610, а также сателлит для него
Оригинальный приемник Spektrum AR6100e и его китайский клон OrangeRX R610, а также сателлит для него
Регуляторы напряжения (esc)
О том, что такое регулятор (контроллер) скорости и для чего он нужен думаю уже стало понятно из предыдущего пункта. По сути, регулятор представляет собой микроконтроллер с прошитой в него программой и силовые ключи для управления обмотками мотора.
 Несколько типичных регуляторов напряжения со встроенным BEC’ом
Несколько типичных регуляторов напряжения со встроенным BEC’ом
Основная характеристика ESC – максимальный ток который он может обеспечить для питания мотора. Среди моделистов почему-то распространена привычка подбирать регуляторы с большим запасом по току. Это не всегда рационально и примеры из жизни показывают что “впритык” подобранный регулятор работает ничуть не хуже, зато весит и стоит гораздо меньше (по крайней мере это справедливо для питания от трехбаночных аккумуляторов, с ростом напряжения лучше все же иметь запас).
Конструктивно, чаще всего регулятор представляет собой плату засунутую в термоусадку. Чтобы предохранить электронику от влаги многие моделисты перед установкой регулятора дополнительно герметизируют эти два конца термоусадки с помощью герметика или термоклея.
Регуляторы скорости бывают со встроенным стабилизатором напряжения (BEC – Battery Eliminator Circuit) и без него. Стабилизатор напряжения выдает 5В и используется для питания приемника, серв и прочей рассчитанной на это напряжение аппаратуры. В случае если у вашего регулятора нет встроенного BEC’a, для питания приемника и аппаратуры придется использовать отдельный стабилизатор напряжения – UBEC (Universal Battery Eliminator Circuit).
Некоторые специально ставят UBEC для большей надежности (чтобы не зависел от нагрева регулятора), или разносят питание мощных (сервы) и важных (приемник) потребителей на разные цепи. Стабилизаторы напряжения в свою очередь бывают двух типов – линейные и импульсные (обозначаются пометкой Switching).
Импульсные стабилизаторы имеют более высокий КПД (особенно хорошие дорогие импульсные стабилизаторы), а следовательно меньше греются. Не рекомендуется запараллеливать питание нескольких стабилизаторов. В случае с линейными стабилизаторами это просто не рекомендуют делать из-за разброса параметров их электронных компонентов, а в случае с импульсными стабилизаторами это делать категорически нельзя.
Микроконтроллер регулятора обычно имеет несколько параметров которые можно настроить. Набор чаще всего стандартный – это тормоз, тип отсечки, тип аккумулятора, напряжение отсечки, тайминг, мягкий старт и частота PWM, но иногда бывают и дополнительные специфичные параметры. Подробнее об этом и о программировании регуляторов я расскажу в следующей статье.
Хочу отметить, что разные модели регуляторов могут иметь различное “предназначение”. Например, регулятор отлично работающий в самолете будет совсем никуда не годным в квадрокоптере, или наоборот. Это сложно оценить объективно, поэтому лучше ориентироваться на отзывы из жизни.
 Типичный UBEC
Типичный UBEC
Сервоприводы
Я не буду сильно останавливаться на этом пункте, так как материал по сервам очень обширный и его в двух словах не расскажешь. Напишу основное.
Сервопривод (серва или рулевая машинка, сервомашинка) представляет собой не просто моторчик с резистором и шестеренками, но также и электронную плату которая преобразует сигнал управления с приемника и контролирует работу мотора сервы. Соответственно, сервы бывают цифровыми и аналоговыми.
По размерам все сервоприводы делятся на несколько стандартных классов – гигантские, нормальные, мини, микро, нано. Бывают также низкопрофильные сервомашинки уменьшенной высоты. Основные характеристики – скорость перекладки и мощность усилия. Еще два важных свойства – точность отработки и надежность.
На самом деле выбор серв для модели – очень важное и ответственное действие, здесь тоже есть свои фавориты и разница в ценах между дешевыми и дорогими сервами может достигать десятков раз. Поэтому лучше подойти к этому делу ответственно и хорошенько изучить советы и отзывы перед покупкой, т. к. от этого зависит, во-первых, точность поведения модели в воздухе, во-вторых, вероятность потерять модель в один “прекрасный” момент из-за отказа сервомашинки.
 Типичная цифровая серва
Типичная цифровая серва


