

- 2 Оптимальное управление
- Бортовой компьютер и сенсоры
- Безопасность
- Краткий гайд по квадрокоптерам для fpv. часть третья – про двигатели и регуляторы.
- Моторы и пропеллеры
- Поворотный механизм
- Регулятор оборотов коллекторного микроэлектродвигателя для ру модели
- Ремонт регуляторов скорости от rax-а
- Теория полета
2 Оптимальное управление
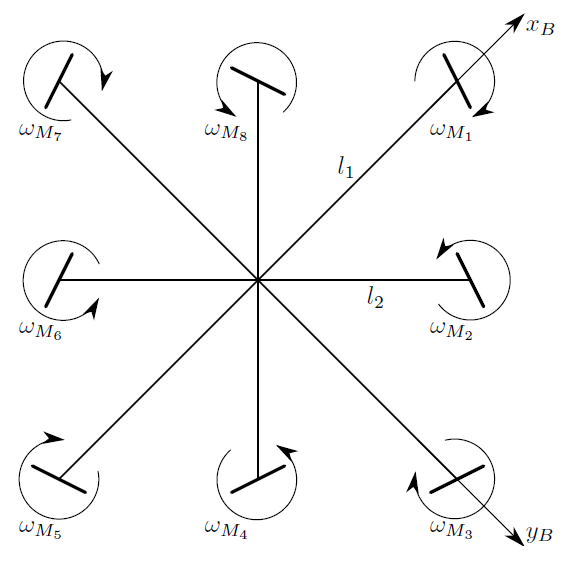
С точки зрения управления коптер представляет собой не самую простую конструкцию – мы имеем 8 двигателей, которыми можно управлять индивидуально, но практически каждый из них влияет на все 12 из переменных состояния (фазовых координат) коптера. То есть, если мы будем «рулить» одним из двигателей – менять его обороты в большую или меньшую сторону, это будет оказывать воздействие на каждую из координат x, y, z и на каждую из трёх угловых скоростей.
Кроме случаев, когда вектор тяги параллелен какой-либо из координатных плоскостей системы B – тогда на 4 из 12 переменных состояния данная сила тяги воздействовать не будет. И, если бы мы делали всё методами классической теории управления, то можно было бы записать 8х12 = 96 передаточных функций между 8 входными воздействиями и 12 выходными (переменными состояния) коптера.
Также, изменение оборотов (частоты вращения) двигателей приводит к нелинейному (а к квадратичному) изменению силы тяги. В проектировании регуляторов коптера это предполагается как аксиома, и она довольно хорошо согласуется с экспериментальными данными.
Задача оптимального управления заключается в том, чтобы перевести коптер из точки А в точку Б с минимальным перерегулированием, по оптимальной (как правило кратчайшей) траектории и за минимальное время. При этом налагаются ограничения на максимальную скорость, ускорения и углы наклона коптера (отклонение от горизонтальности).
Проблема заключается в том, что в «прямую» сторону можно довольно несложно посчитать – как воздействует каждый из двигателей (8 переменных – 8 частот вращения) на каждую из 12 переменных состояния. А если учитывать еще и ускорения, то на каждую из 18 переменных.
Если не сильно вдаваться в теоретические дебри теории оптимального управления и нелинейного программирования, такую задачу можно свести и решить методом множителей Лагранжа, а точнее – условиями и методом Каруша-Куна-Такера, где ограничения, накладываемые на переменные, представляют собой неравенства.
Чтобы упростить изложение, приведем краткий ход решения задачи. Для начала запишем матрицу Г размерностью 6х8 – по количеству каналов управления (6) и количеству ВМГ (8), которая будет отображать как именно каждый из двигателей влияет на каждый из каналов управления:
Где: fi|x,y,z – это коэффициент перед 

 Рисунок 16. Структура регулятораМетодами теории оптимального управления (подробнее см. [1, раздел 4.1.1]) задача решается поиском так называемой обратной псевдоинверсной матрицы
Рисунок 16. Структура регулятораМетодами теории оптимального управления (подробнее см. [1, раздел 4.1.1]) задача решается поиском так называемой обратной псевдоинверсной матрицы 

На практике, для заданной геометрии коптера и полученных 48 чисел в матрице Г, получаем другие 48 чисел, которые определяют правило управления (микширования) двигателей, при поступлении той или иной команды по какому-либо каналу управления. На рисунке 16 представлена общая схема построения регулятора.
Задатчик положения вырабатывает нужные координаты, в которые требуется привести коптер. Они сравниваются по какому-то алгоритму с измеренными координатами и управляющий алгоритм вырабатывает 6 управляющих воздействий, по каждому из каналов управления.
На основе посчитанной псевдообратной матрицы 
Управляющие команды по каждому из каналов управления формируются как рассогласование между заданной координатой (углом) и текущей, измеренной координатой. Это в самом простом варианте. В более сложном управляющий алгоритм должен иметь в своём составе алгоритм приоритетности стабилизации положения коптера над алгоритмом перемещения в пространстве.
Дело в том, что по каждому из каналов есть запас (располагаемая у ВМГ возможность) управления. И, если (например) мы сделаем приоритетным перемещение по оси х то при большом рассогласовании между текущей координатой x и заданной регулятор будет стремиться наклонить всё больше и больше коптер вокруг оси y, и при определенном наклоне уже не хватит возможностей двигателей обеспечивать стабилизацию коптера и регулирование высоты полёта.
Для коптера с конкретными параметрами двигателей, винтов, массы и размеров это всё можно вычислить и наложить нужные ограничения на управляющие воздействия ui(t), а также их приоритет. Но это выходит за рамки данной статьи, где мы делаем модель в общем виде.
Выпишем аналитические выражения для элементов первых двух столбцов матрицы Г в случае рассматриваемого октокоптера (без реактивного момента ВМГ и без прецессии!):
Видно, что первая ВМГ (ось силы тяги которой параллельна плоскости yz) не создаёт никакой силы вдоль оси x и никакого момента вокруг оси x (т.к. пересекает её). Поэтому при управлении по оси x или для создания вращательного момента вокруг оси x первый двигатель «бесполезен».

Третья колонка – управление по оси z, имеет отрицательные числа т.к. ось z направлена вниз, а вектора силы тяги ВМГ – вверх. Обратим внимание, что абсолютные значения чисел третьей колонки гораздо меньше, чем первой и второй и все имеют один и тот же знак.
Это означает что коптер имеет гораздо лучшую управляемость по вертикальной оси, что очевидно, т.к. все ВМГ как раз и работают практически в эту сторону (а не влево-вправо-вперёд-назад). Четвёртая колонка и пятая – это управляемость коптера по крену и тангажу, последняя шестая – по курсу.
Видно, что по курсу коптер гораздо слабее управляем, чем по крену и тангажу. Но для наших целей, и для целей настоящей обучающей статьи, этого было достаточно. Подбором направлений сил тяги ВМГ (и перевычислением матриц для новой геометрии) можно этот баланс менять.
Обратим также внимание на то, что теоретически – при вычисленном и приведенном здесь количественно микшировании двигателей, достигается только управление по выбранному каналу, без влияния на другие каналы управления. Т.е. при выбранном расположении ВМГ у октокоптера, в некоторых малых пределах можно изменять направление вектора тяги, без создания поворотных моментов т.е. не наклоняя сам коптер, и он будет горизонтально лететь и управляться без наклонов. Но только в очень узком диапазоне скоростей и внешних возмущений.
Общая структура регулятора приведена на рисунках 17 и 18.
Рисунок 17. Общая схема регулятораРисунок 18. Схема каналов регулятораВ самом простейшем случае — на 6 входов регулятора поступают заданные фазовые координаты, они сравниваются с текущими (измеренными) и в общем случае в соответствии с матрицей
Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик — начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте.
На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; • компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет).
К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; • сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.
MegaPirateNG — это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Краткий гайд по квадрокоптерам для fpv. часть третья – про двигатели и регуляторы.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке.
Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.

он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя.
Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.

И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент.
Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше — тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
Поворотный механизм

Настало время для механизма поворота заднего мотора. Вот это пакетик с 40мм креплениями для передних колес. Всего 2.5$ за два с половиной узла поворота.
Возьмем две таких штучки и рассверлим в одном из них отверстие 4.2мм. 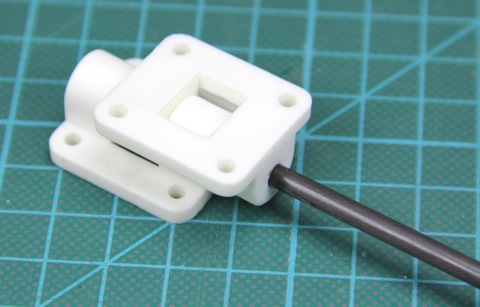
Удалим весь мусор после сверления и вставим 4мм ось (прим.: например карбоновую трубку от удочки). Она четко закрепляет в той части, которую не сверлили. Придется постараться чтобы вставить одно в другое.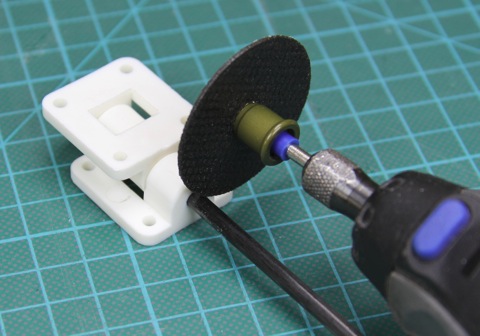
Отпиливаем лишнее. Я использовал дремель с диском.
Стачиваем неровности на той части, которую сверлили.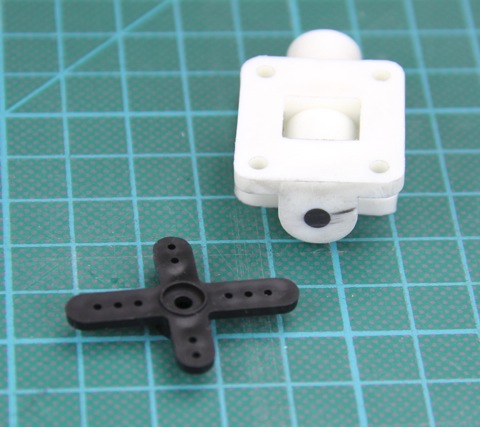
Пришло время соединения поворотного механизма с сервой. Используемая серва пришла с крестовым креплением, которое отлично нам подойдет.
Сделаем крестовину плоской.
И приклеим к поворотному механизму, чтобы потом было проще сверлить, да и держаться покрепче будет. Пару важный вещей: крестовину клеим на ту часть, которую не сверлили и стараемся чтобы её отверстие совпадало с местом установки вала. Если не получится, то будет лишняя нагрузка на серву.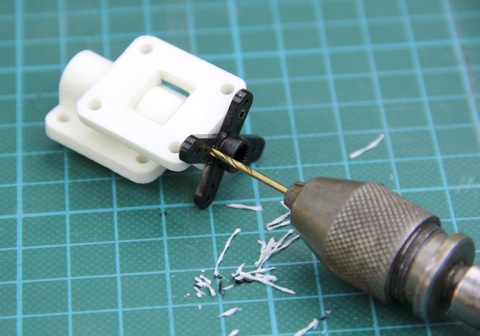
А теперь просверлим два 1.2мм отверстия. Сверлите чуть глубже, чем длинна шурупов, которыми потом будете скреплять это.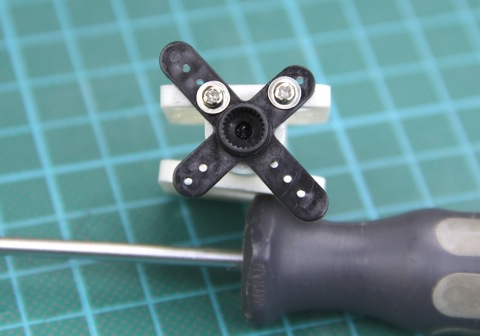
И закрепим шурупами, например от мелкой сервы.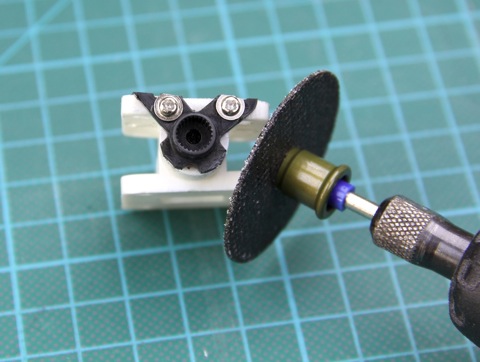
Срезаем лишнее.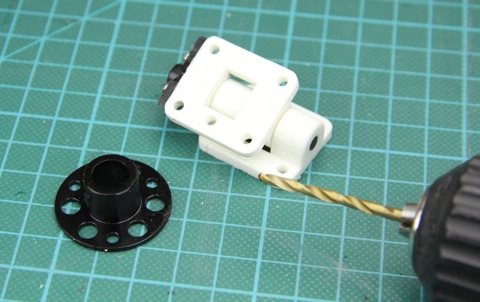
Крепления DT750 очень хорошо подойдут для такого механизма. Только придется просверлить одно отверстие в поворотном механизме, куда будет укреплен мотор (и куда прикручена крестовина от сервы).
Три 2.5мм стяжки всё что необходимо для закрепления мотора. Стяжки лучше закрепить так, как показано на картинке, чтобы не мешать отклонению поворотного механизма.
А теперь немного переделаем серву, срезав нижнюю часть крепления. Чтобы серва подходила по высоте, придется добавить 0.8мм стеклотекстолита или сточить поворотный механизм на эти самые 0.8мм.
Поворотный механизм готов. Осталось только стяжками пристегнуть его к заднему лучу.
Серву притягиваем более толстыми стяжками. При установке стяжек сделайте так, чтобы замки стяжек были по разные стороны луча.
Регулятор оборотов коллекторного микроэлектродвигателя для ру модели
Желание собрать радиоуправление у меня созрело достаточно давно. Но дальше поиска схем, с последующим пониманием, что прошивку автор не даст, дело не продвинулось. В итоге, затея была похоронена в стадии развития. Но недавно мне на глаза попались модули, именуемые NRF24L01 (стоит 0.6$ на Ali), и уже позабытое желание собрать радиоуправление загорелось с новой силой.
В конечном счете, была разработана схема радиоуправления, а так же несколько сопутствующих устройств. Об одном из них и пойдет речь в данной статье. К слову, в следующих статьях будет описано само радиоуправление, а так же зарядное устройство для li-ion аккумуляторов.
Регулятор оборотов двигателя — это название слышал любой моделист, а в особенности те, кто собирал авиа- и судомодели. Это устройство незаменимо, так как оно обеспечивает плавное управление скорость двигателя.
https://www.youtube.com/watch?v=JxtgtNsXNBM
Существует множество вариантов исполнения таких регуляторов: на микроконтроллерах, на жесткой логике и даже на дискретных компонентах. После просмотра уже готовых схем, я понял что придется делать что-то свое — на логике собирать не хотелось, на дискретных компонентах выходило уж очень громоздко.
После всего этого и была разработана и собрана схема.
Итак, краткие характеристики (при номиналах деталей, указанных на схеме):
- Диапазон питающих напряжений: 7 . 35В
- Максимальный ток: 3А
- Длительность управляющего импульса: 1 . 2мс
- Рекомендованный период импульсов: 20мс
Силовая часть представляет собой Н-мост с дополнительными маломощными управляющими транзисторами. Управление оборотами двигателя производится ШИМ сигналом, генерируемым МК. Скважность ШИМ зависит от длительности импульса, поступающего на вход устройства.
Обработку сигналов и управление транзисторами в этой схеме выполняет микроконтроллер ATtiny2313. Этот выбор ничем не обусловлен, кроме того, что он у меня валялся под рукой на момент проектировки устройства. Изначально, в схеме планировалось использование полевых транзисторов, но позже я от них отказался в пользу более доступных советских биполярников (которых практически у каждого целый ящик). Конечно, это наложило свой отпечаток на параметры: максимальный ток значительно снизился, как и цена девайса.
Как уже упоминалось, напряжение питания устройства может варьироваться от 6 до 30 вольт. Это обусловлено границами напряжения, которое может выдержать интегральный стабилизатор LM7805, а так же двигатель (на него подается напряжение, отличное от питающего примерно на 1 вольт).
Максимальный ток зависит от применяемых транзисторов. В моем варианте — это КТ816/817, максимальный ток коллектора которых равен трем амперам.
В качестве маломощных управляющих транзисторов использованы распространенные КТ315.
Для более точного измерения длительности управляющего (серво) импульса был применен кварцевый резонатор на частоту 8МГц.
Диоды D1 — D4 желательно монтировать. Будет работать и без них, но вопрос в том, как долго.
Печатная плата устройства выполнена на одностороннем фольгированном материале (стеклотекстолит, гетинакс). Дорожки выделенные красным — перемычки с лицевой стороны. В моем варианте транзисторы монтируются вне платы на радиаторе.
Печатная плата устройства (синие проводники — обратная сторона):
Принцип работы
При получении импульса, запускается 16 битный таймер, который останавливается по спаду импульса. Таймер настроен таким образом, что каждый его такт — это 1мкс, что позволяет упростить вычисления. После определения длительности импульса происходит сравнение с заданной величиной. Результат записывается в регистр OCR1A/B в зависимости от положения джампера и длительности импульса.
Исходный код приведен ниже. Так же его можно взять в приложении к статье.
В наладке устройство не нуждается, и должно работать сразу после правильной сборки и прошивки микроконтроллера. С последним будьте осторожны — не отключите ненароком бит RSTDISBL. Это может стоить вам нового микроконтроллера (если у вас конечно нет параллельного программатора).
Транзисторы КТ315 можно заменить любыми маломощными кремниевыми транзисторами структуры n-p-n. КТ816/817 — аналогичными по параметрам (или более мощными). К примеру, КТ818/819 и т.д. Резисторы можно заменить на аналогичные по мощности с допуском 20-30% от номинального сопротивления.
Фото , а так же видео работы устройства можно увидеть ниже.

Извиняюсь за не очень презентабельный вид платы — изначально это был тестовый вариант «на первое время». Но так как устройство с первого раза заработало так как от него требовалось, то «временный вариант» перерос в постоянный.
Ремонт регуляторов скорости от rax-а
Для начала откроем регулятор, для этого нужно аккуратно разрезать термоусадку по всей длине

После этого достаём плату из термоусаадки и снимаем радиатор
Здесь деталей достаточно 🙂 Для того чтобы разобратся что к чему привожу блок схему (схемочично)

Для понятности выделил цветом на плате в соответствии с блок схемой

После того как вскрыли регулятор начинаем диагностику. Для начала проверяем визуальным осмотром на сколы деталей, гарь, копоть транзисторов, замыкания, металлической стружки, плохого пропая, криво установленых деталей. Если такие дефекты наблюдаются то устранить их, взможно это и являлось причиной поломки, но не спешите его включать! Возможно есть ещё горелые детали. Чаще всего у них выгорают управляющие транзисторы (ключи) у меня их 6 штук. (Синий цвет) По 3 с каждой стороны. Они как правило сгорают от перегрузки или от короткого замыкания. В интернете много информации о том как их проверить. Но можно быстро проверить их на наличие пробоя между стоком и истоком, стоком и затвором. Если такие имеются заменить такими же или найти аналоги согласно их параметрам. Проверить надо все! Как правило они выгорают в паре с одной и с другой стороны. У меня сгорели все 6 🙂 Пока на радостях не включаем! вожможно если пробой был между стоком и затвором выгорели другие элементы.
Далее проверяем SBEG (голубой цвет) На нём должно быть напряжение 5.4 – 5.6 вольт. Обратите внимание там не ровно 5 вольт! так что будте бдительны когда будете питать SBEG-ом другие устройства SBEG это импульсный стабилизатор. Если напряжение не выдерженно то проверяем его компоненты. Он состоит из задающего генератора (микросхема из 8 ног) и полевика (микросхема 6 ног). Надо проверить полевик на наличие пробоя, защитный диод (прямоугольник левее фильтра) и электролит (жёлтый прямоугольник).
Схема SBEG-а из даташита (на примере LM3485)
После того как вскрыли регулятор начинаем диагностику. Для начала проверяем визуальным осмотром на сколы деталей, гарь, копоть транзисторов, замыкания, металлической стружки, плохого пропая, криво установленых деталей. Если такие дефекты наблюдаются то устранить их, взможно это и являлось причиной поломки, но не спешите его включать! Возможно есть ещё горелые детали. Чаще всего у них выгорают управляющие транзисторы (ключи) у меня их 6 штук. (Синий цвет) По 3 с каждой стороны. Они как правило сгорают от перегрузки или от короткого замыкания. В интернете много информации о том как их проверить. Но можно быстро проверить их на наличие пробоя между стоком и истоком, стоком и затвором. Если такие имеются заменить такими же или найти аналоги согласно их параметрам. Проверить надо все! Как правило они выгорают в паре с одной и с другой стороны. У меня сгорели все 6 🙂 Пока на радостях не включаем! вожможно если пробой был между стоком и затвором выгорели другие элементы.
Далее проверяем SBEG (голубой цвет) На нём должно быть напряжение 5.4 – 5.6 вольт. Обратите внимание там не ровно 5 вольт! так что будте бдительны когда будете питать SBEG-ом другие устройства SBEG это импульсный стабилизатор. Если напряжение не выдерженно то проверяем его компоненты. Он состоит из задающего генератора (микросхема из 8 ног) и полевика (микросхема 6 ног). Надо проверить полевик на наличие пробоя, защитный диод (прямоугольник левее фильтра) и электролит (жёлтый прямоугольник).
Схема SBEG-а из даташита (на примере LM3485)
Далее смотрим стабилизатор для ATmega8a (оранжевый цвет) Это обычный стабилизатор на 5 вольт на микросхеме LM2931 (8 ног). Проверяем напряжение должно быть в пределах 4.9 – 5.1 вольт. Если не так – заменить.
Смотрим в даташит (в бонус ещё и распиновка)
Следующий шаг это стабилизатор на 12 вольт на базе 78L12 (розовый цвет). Измеряем напряжение должно быть в пределах 11.9 – 12.1 вольт. В случае чего заменям деталь.
Схема по даташиту 
Следующий шаг это стабилизатор на 12 вольт на базе 78L12 (розовый цвет). Измеряем напряжение должно быть в пределах 11.9 – 12.1 вольт. В случае чего заменям деталь.
Схема по даташиту
Инвентор (серый цвет) состоит из 3 транзисторов и 3 диодов которые надо тоже проверить на пробой.
Ну и заключительный этап это микросхема ATmega8a (фиолетовый цвет). Китайцы решили сэкономить и вместо ATmega8 вставили ATmega8a которая в разы дешевле. Для её проверки нужно проверить выводы на наличие пробоя. В включенном состоянии на выводах микросхемы идущих напрямую через ограничивающие резисторы на ключи должны быть логические нули. А выводы идущие через инвентор должны быть логические еденицы. Если не так возможно микросхема вышла из строя. Также при наличии специального оборудования полезно проверить кварц на 16 MHz (полосатый прямоугольник).
С диагностикой разобрались у меня вышло 6 горелых транзисторов которые лечатся заменой я заменил 30 амперниками из материнки, выглядит далеко не эстетично (размер большой у транзисторов) зато работает.

По поводу выпайки не обязательно иметь паяльный фен, главное больше припоя и флюса. Я паял обычным 40 ваттным паялом 🙂
В заключении даже если не получится наладить регулятор в любом случае его можно оставить на детали для ремонта других регуляторов.
И ещё хотелось бы сказать что у меня регулятор сгорел после заливания прошивки kda для multistar. При включении он пропищал т.е. загрузился при подаче газа он задымился 🙁 Может кто скажет что я сделал не так.
Всем удачного дня!
RaX
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит».
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.

В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт.
Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два — против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами.
Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся.
А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо.
Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса.
Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch.
Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.


