

Робот asimo – самый человечный из всех роботов
Этого симпатичного робота ASIMO создала японская корпорация HONDA. Он может ходить задом наперёд, бить по мячу, ходить по лестнице, танцевать и прыгать, знает язык жестов и это ещё не всё…

Этого симпатичного робота-андроида по имени ASIMO (сокращение от Advanced Step in Innovative MObility) создала японская корпорация HONDA. Последняя версия робота, выпущенная в 2023 году, имеет рост 130 см, массу 50 кг и напоминает человечка в белом скафандре с рюкзаком-аккумулятором за спиной. «Лицо», покрытое тёмным стеклом, делает робота похожим на космонавта в шлеме. Множество его плат, механизмов и микросхем нагреваются – и робот излучает почти человеческое тепло.

Этот робот способен различать людей по специальным карточкам, которые носятся на груди. Он может ходить вверх и вниз по лестнице, бегать со скорость до 9 км/ч, открывать бутылки, подавать напитки и при необходимости вежливо пожать руку.






Последняя демонстрация показала гибкость и баланс робота – теперь ASIMO может ходить задом наперёд, бить по мячу, танцевать и прыгать (даже на одной ноге), а также знает язык жестов благодаря обновлённым рукам, пальцы которых стали ещё более гибкими. Помимо этого, ASIMO может следить за поведением человека и предсказывать его дальнейшие действия. Самым главным обновлением интеллектуальных способностей робота можно считать распознавание лиц и голосов в толпе и умение слушать определённого собеседника, даже если голоса нескольких людей звучат одновременно.






ASIMO был разработан для того, чтобы помогать людям с ограниченными возможностями. По состоянию на 2009 год в мире существовало 100 экземпляров ASIMO. Стоимость производства каждого из них не превышает один миллион долларов.

Первая модель была представлена в 2000 году. С тех пор японские учёные изучали человеческие движения в попытке повторить их на своём роботе. С моделью ASIMO образца 2000 года HONDA добавила роботу массу функций, которые позволили ему лучше общаться с людьми. Эти функции делятся на пять категорий:
- Распознавание движущихся объектов
У ASIMO в голову встроена видеокамера. С её помощью робот может следить за перемещениями большого числа объектов, определяя дистанцию до них и направление. Практические применения этой функции следующие: способность следить за перемещениями людей (поворачивая камеру), способность следовать за человеком и способность «приветствовать» человека, когда он войдёт в пределы досягаемости. - Распознавание жестов
ASIMO умеет верно истолковывать движения рук, распознавая тем самым жесты. Вследствие этого можно отдавать роботу команды не только голосом, но и руками. Например, ASIMO понимает, когда собеседник собирается пожать ему руку, а когда машет рукой, говоря «До свидания». ASIMO может также распознавать указующие жесты, типа «иди вон туда». - Распознавание окружения
ASIMO умеет распознавать предметы и поверхности, благодаря чему может действовать безопасно для себя и для окружающих. Например, ASIMO владеет понятием «ступенька» и не будет падать с лестницы, если его не столкнуть. Кроме того, робот умеет двигаться, обходя людей, вставших у него на пути. - Различение звуков
Различение звуков происходит благодаря системе HARK, в которой используется массив из восьми микрофонов, расположенных на голове и теле андроида. Она обнаруживает, откуда пришёл звук, и отделяет каждый голос от внешнего шума. При этом ей не задаётся количество источников звука и их местоположение. На данный момент HARK, способна надёжно (70-80 % точности) распознавать три речевых потока, то есть ASIMO способен улавливать и воспринимать речь сразу трёх человек, что обычному человеку недоступно. Робот умеет откликаться на собственное имя, поворачивать голову к людям, с которыми говорит, а также оборачиваться на неожиданные и тревожные звуки – такие, например, как звук падающей мебели. - Распознавание лиц
ASIMO способен замечать знакомые лица, даже во время движения. То есть, когда движется сам ASIMO, движется лицо человека, или движутся оба объекта. Робот может отличать примерно десять разных лиц. Как только ASIMO узнаёт кого-нибудь, он тут же обращается к знакомому по имени.

ASIMO умеет пользоваться Интернетом и локальными сетями. После подключения к локальной сети дома, ASIMO сможет разговаривать с посетителями через домофон, а потом докладывать хозяину, кто пришёл. После того, как хозяин согласится принять гостей, робот сумеет открыть дверь и довести посетителя до нужного места.

Исследователи считают, что в один прекрасный день ASIMO сможет помогать пожилым людям, которым необходим постоянный уход, а так же людям с ограниченными возможностями.
Источник: wikipedia.org
Презентация этого удивительного робота
Демонстрация способностей робота ASIMO
ASIMO: история развития робототехники компании HONDA
Статья ‘шагающие роботы для спасательных операций. обзор и анализ существующих моделей’ – журнал ‘кибернетика и программирование’ –
DOI:
10.25136/2644-5522.2023.1.35862
Дата направления статьи в редакцию:
03-06-2023
Дата публикации:
01-10-2023
Аннотация: В данной статье за основу были взяты малораспространённые шагающие роботы, которые используются или предлагаются в качестве помощников в недетерминированной среде, например, во время спасательных операций. Необходимо было провести глубинный анализ существующих моделей для актуализации информации по тематике роботов с шагающим движителем по нескольким критериям: габариты, вес, количество степеней свободы, скорость движения, потребляемая мощность, время автономной работы, максимальная нагрузка, также была поставлена задача в поиске достоинств и недостатков рассмотренных моделей. Для начала были выделены области исследования по тематике статьи для сужения круга поиска существующих прототипов и реальных роботов. Методами сравнительного и критического анализов была проведена работа с доступными материалами за последние 5 лет, которая позволила выполнить задачи, ставящиеся перед написанием статьи. Результатами исследования стали выявленные итоговая таблица по крупно обобщённым группам шагающих роботов и три общие таблицы по рассматриваемым моделям, суммирующие их преимущества и слабости моделей. Такие данные помогут исследователям углубить знания в тематике шагающих роботов, проанализировать как собственные работы, так и исследования зарубежных коллег и соотечественников, применить в дальнейшей своей работе, акцентировать свою деятельность на решение проблем, подчеркнуть уникальность и актуальность своих разработок. Данная статья выделяет особенности использования шагающих роботов, применимых специально для спасательных операций, но области использования описываемых роботов может быть обширнее. Обзорная статья также выделяет и описывает нетрадиционные движители шагающих роботов, помимо классических походок, широко известных, по своей большой огласке в средствах массовой информации, видео хостингах и прочих инструментах получения информации.
Ключевые слова:
робот, шагающий робот, спасательная операция, проблемы, недостатки, преимущества, достоинства, антропоморфный робот, четвероногий робот, гексапод
Abstract: This article explores the walking robots that are used or assist in nondeterministic environment, such as rescue operations. This required carrying out in-depth analysis of the existing models to acquire relevant information on the robots with walking mechanisms in accordance with several criteria: parameters, weight, degrees of freedom, speed of movement, input energy, runtime, maximum load, advantages and disadvantages of the reviewed models. Using the methods of comparative and critical analysis, the author analyzed the available materials for the past 5 years, which allowed accomplishing the set tasks. The results consist in compiling a summary table for largely generalized groups of walking robots and three tables for the models under review, which summarize their advantages and weaknesses. Such data would broaden the knowledge of the researchers dealing with the walking robots, analyze both national and foreign studies on the topic, apply this experience in further work, focus on solution of the problems, and emphasize the uniqueness and relevance of their developments. This article determines the peculiarities of utilization of walking robots specifically in rescue operations; however, the scope of their applicability can be broader. The author also describes the nontraditional locomotors of walking robots, which are widely known in media, video hosting, and other tools of receiving information.
Keywords:
anthropomorphic vehicles, dignity, advantages, limitations, problems, rescue operation, walking robot, robot, quadruped robot, hexapod
Введение
Современность преподносит много ситуаций, к которым человек оказывается не приспособлен. В отличие от предшествующих поколений людям настоящего времени привычны многие изобретения, о которых раньше могли только мечтать или даже не догадываться, что такое может существовать. Как и всё в этом мире, человек не стоит на месте, он адаптирует и изобретает больше новых гаджетов, значительно упрощающих и совершенствующих жизни людей. Теперь без многих таких аппаратов и усовершенствований люди уже не представляют свою жизнь, но все равно далеко не все сферы существования охвачены такими большими исследованиями, некоторые из них по-прежнему остаются малоизученными и малоприспособленными к новой реальности.
Например, в настоящее время в условиях нестабильной обстановки окружающей среды, сложностей адаптации человека к изменяющимся реалиям мира, а также его ограниченности в познаниях неизученного, в экосистемах стали еще чаще возникать природные, техногенные, социальные и другие опасные ситуации. Такие события нередко угрожают не только здоровью и жизни людей, но и жизнедеятельности всех обитаемых на Земле организмов, а также материальным и нематериальным имуществам и благам, так необходимым человеку. Периодичность и мощность таких проблем, происходящих на нашей планете, прогрессируют с каждым годом [1, с. 36]. При возникновении чрезвычайных ситуаций в большинстве случаев проводятся аварийно-спасательные работы, основным направлением которых является спасение жизни и здоровья человека, а также снижение размеров вреда, наносимого окружающей среде и материальных потерь.
Многообразие всех этих разрушительных природных и природно-антропогенных явлений согласно [2, с. 36] делится на 4 основные группы:
• геологические чрезвычайные ситуации;
• гидрологические стихийные бедствия;
• пожары;
• метеорологические катаклизмы (движение воздушных масс).
На сегодняшний день человечество стремится минимизировать события бедствий и их последствия, изобретая новые средства защиты. Технические достижения в области аварийно-спасательных работ достаточно быстро развиваются и приводят к роботизированным техническим комплексам (РТК), которые в дистанционно управляемом, полуавтономном и автономном режиме [3, с. 36] проводят поисково-спасательные операции, наиболее часто в таких случаях используются роботы с шагающими движителями.
Каждый день возникают новые осложнения, часть из которых требует достаточно много времени на проработку, хоть и выглядят они сначала, как простые задачи с быстрым решением. Всем известно, что роботы особо часто применяются в тяжелых ситуациях, как для морального, так и для физического здоровья человека. В таких случаях возникают проблемы применения робототехнических систем (РТС) в конструкциях, которые не позволяют распространиться сигналу, сильно затрудняется использование мобильных роботов, так как беспроводное управление может быть прервано, а кабельное затрудняет прохождение аппарата в недетерминированных средах.
Обнаружение человека в помещении — это одна из основных проблем во время спасательных операций [4, с. 36]. При идеальном применении робототехнических систем первостепенно нужно найти человека, определить его состояние, при необходимости вызвать спасателя, медицинского работника или же более мощного или сильного робота, который поможет вытащить тело из завалов.
Сферы применения робототехнических спасательных комплексов
К сожалению, не все существующие проблемы на данный момент может решать робот. Проведем краткий обзор основных чрезвычайных ситуаций и выделим основные актуальные направления задач для шагающих роботов.
Первое явление ‑ извержение вулкана. Извержения стали менее катастрофичны, чем, например, извержение Везувия в 79 году н. э., но они продолжают наносить вред человеку, могут быть ужасны и могут привести к соответствующим последствиям. Если с вулканическим пеплом, дымом, сходом гор и обломков, впоследствии разрушениями лесов и домов РТК будет справляться достаточно хорошо, то вот с последствием извержения лавы устройство будет на данный момент бесполезно из-за рабочих температур.
Следующая ситуация – это землетрясение, одно из главных и частых проблем спасателей. После основной волны разрушается большая часть сооружений, и поисково-спасательная операция с участием людей и собак занимается поиском выживших, но при наступлении волны афтершоков ‑ повторных землетрясений – могут возникнуть ситуации, что спасателей самих накроет обломками, и они могут стать пострадавшими. Как раз для таких ситуаций разрабатываются спасательно-поисковые роботы для замены человека, управляемые оператором из безопасного места, также постепенно происходит переход к автономному управлению используемых шагающих роботов. Смерч и циклон (или как принято называть «ураган», «тайфун») по своим последствиям и оставленным разрушениям напоминают землетрясения.
С селями или потоками с большой концентрацией минеральных частиц, камней и обломков горных пород, оползнями, лавинами, карстами и обвалами в качестве стихийного бедствия, т. е., как отрыв и падение масс горных пород со склонов гор, могут быть полезны большие РТК. Ученые заботятся о предотвращении данных явлений и разрабатывают роботов-скалолазов, например, Roboclimber, который может передвигаться по отвесным скалам, по трещинам в породе и по крутым и осыпающимся склонам [5, с. 36].
Наводнение и обвалы зданий после цунами и прочих гидрологических бедствий имеют большой ряд осложнений, вызванных наличием водной составляющей исследований. Несмотря на сложность работы, шагающие роботы подстраиваются под водную сферу жизни и удачно помогают в подобных ситуациях.
Лимнологическая катастрофа — редкое физическое явление, при котором газ вырывается на поверхность из глубины водоёма и создает угрозу удушения. Данная ситуация опасная, но она не относится к сферам использования шагающих движителей на месте происшествия.
Стихийное бедствие «пожар», часто появляющееся в новостных колонках и вызывающее волнения, подразделяется на два вида: лесной и торфяной. Также следует отнести к этой группе более глобальное понятие «пожар», а именно пожар как неконтролируемое распространение огня, приносящее материальный ущерб, вред жизни и здоровью людей. Шагающие роботы, на данный момент, редко когда могут работать с самим пожаром и огнем, зачастую их область работы заключается в исследовании задымленных помещений, открытых пространств заранее известных роботом. Однако существует группа пожарных роботов, которые работают в горящих помещениях для поиска и спасения потерпевших, но они не шагающие, например, робот МУПР [6, с. 36] или Anna Konda [7, с. 36].
Каждый год в той или иной части планеты, в то или иное время все чаще происходят привычные по звучанию такие природные явления, как метель, град или засуха. Перечисленные проблемы являются серьезными для спасательных служб многих стран, но не целесообразно использовать шагающих роботов для данных работ.
Следует заметить, что особенно актуальны и полезны шагающие РТК будут для помощи в терактах, обнаружения и подсчета захватчиков и заложников внутри зданий.
Анализ спасательных шагающих роботов
Как известно, основные робототехнические исследования, передовые технологии по ним, определенные компетенции в выбранной нише занимают Япония и США. В данной статье хотелось затронуть не только основных конкурентов рынка шагающих роботов. Проведем анализ используемых и тестируемых РТК во время спасательных операций.
Роботы HRP-2 Kai и Jaxon, Япония
Яркими примерами из Японии можно считать частых участников спасательных операций HRP-2 Kai и Jaxon, помогающие в поиске и спасении людей после землетрясений, цунами и других природных явлений, представленные на рис. 1. Двуногие антропоморфные роботы также хорошо справляются с завалами и, что особенно, с тушением пожаров.

Рис. 1. Внешний вид роботов HRP-2 Kai (слева) и Jaxon (справа)
Габаритные характеристики человекоподобного робота HRP-2 Kai приведены в таблице 1 [8, c. 36].
Таблица 1. Габаритные характеристики робота HRP-2 Kai
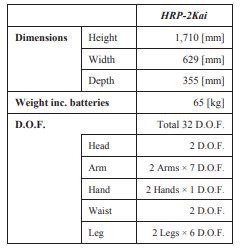
Опираясь на приведённые характеристики и данные из источника [8], делаем вывод, что HRP-2Kai – это аббревиатура от Humanoid Robotics Platform No. 2 «Улучшенный» («Кай» на японском означает «улучшение»). Он был разработан во время второй фазы японского национального проекта HRP (Humanoid Robotics Project) в Национальном институте передовых промышленных наук и технологий (AIST), с улучшениями для решения задач реагирования на стихийные бедствия. Кинематическая структура представлена на рис. 2, из которого видно, что робот имеет 32 степени свободы: 6 на каждой ноге, 2 на талии, 2 на голове, 7 на каждой руке и по 1 в кистях.
Система управляется в реальном времени на основе промежуточного программного обеспечения Open-RTM, разработанного в AIST. Конструкция оснащена набором датчиков внешнего состояния, которые используются во время манипуляций: система 3D-сканера, встроенная в его голову, четыре камеры, размещенные в голове, сзади и на каждой руке, и шестиосевые датчики силы на его запястьях и щиколотках. Система 3D-сканера реализована лазерным дальномером, синхронизированного с шарниром соединения головы. Ручная камера устанавливается в каждую руку вместе со светодиодной лампой и лазером, также важно заметить, что камера не совмещена с продольной осью руки. Датчики силы запястья используются для управления задачами, в частности, для обнаружения контакта руки с окружающей средой, а датчики силы в голеностопном суставе ‑ для стабилизации двуногой ходьбы.
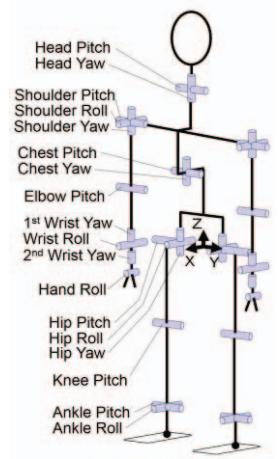
Рис. 2. Кинематическая схема робота HRP-2Kai
Конфигурация комплекса HRP-2Kai с управляемым положением ног, согласно исследованиям [9, с. 36], не имеет проблемы с регулированием баланса при вытянутых коленях. Эта особенность, несомненно, является достоинством системы.
За основу в работе [10, с. 36] взят робот-гуманоид JAXON, разработанный в лаборатории Университета Токио, имеет систему жидкостного охлаждения для охлаждения двигателей и приводов двигателей, за счет которой реализуется мощное движение. Однако система жидкостного охлаждения делает робота тяжелым. На рис. 3 и рис. 4 приведены габаритные размеры, кинематическая схема робота, основные характеристики шарниров, таблица сравнения приводов MAXON EC-4pole 30 200W в шарнирах. Робот имеет 32 степени подвижности.
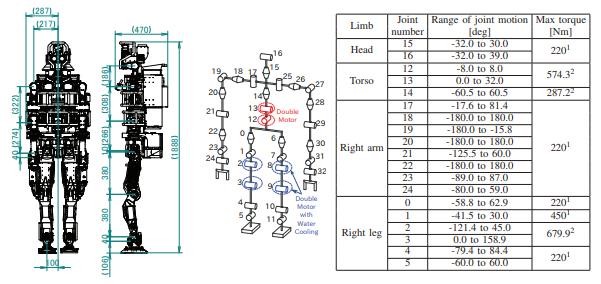
Рис. 3. Конфигурация робота JAXON
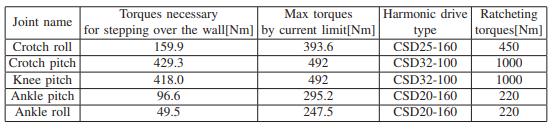
Рис. 4. Характеристики шарниров и приводов робота JAXON
В работе [11, с. 36] была выделена средняя скорость движения во время «ходьбы» комплекса JAXON, равная 0.6 м / с. Такое же значение средней скорости робота HRP-2Kai выявлено в работе [12, с. 36].
Недостатки HRP-2 Kai и Jaxon:
Антропоморфные роботы не всегда владеют с балансом на пересеченной местности [13, с. 36]. Часто антропоморфные роботы сталкиваются с проблемой регулирования баланса при вытянутых коленях, несмотря на контур управления положения ног, за счет препятствия прямому управлению распределения силы на полу из-за механических особенностей [9].
В моделях восприятия окружающего мира во время движения нужно повышать точность распознавания внешней среды и снижать вычислительные затраты.
Во время выполнения задач в неизвестных средах с высокой надежностью, гуманоидным роботам необходима высокоточная локализация. Также обычно антропоморфные роботы не имеют привязки к постоянной горизонтальной плоскости, тогда как она может использоваться как часть быстрых и экономичных методов локализации [14, с. 36]. Перенос объекта перед корпусом во время движения вызывает визуальную окклюзию и нестабильность удержания робота, что несет в себе проблему использования РТС [15, с. 37].
Еще одна проблема человекоподобных роботов – это применение большой силы, например, задача, при которой опорная сила неизвестна (копание).
Робот WALK–MAN, Италия
Итальянский двухметровый гуманоидный робот-помощник WALK-MAN, представленный на рис. 5, способен взаимодействовать с различными инструментами и окружающей средой. Робот может найти место пожара, подойти к этому месту, активировать огнетушитель для ликвидации огня. Во время операции он может собирать изображения, передавать их обратно спасателям-операторам для оценки ситуации и дальнейшего управления.

Рис. 5. Внешний вид робота WALK-MAN
Верхняя часть тела WALK-MAN (исключая руки и шею) имеет 17 степеней свободы, каждая рука имеет 7 степеней свободы, а талия – 3 DOF. Кинематика руки WALK-MAN напоминает устройство с 3 степенями свободы на плече, 1 степенью свободы в локте, 1 степенью свободы для вращения предплечья и 2 степенями свободы в кисти. Такая типичная конфигурация руки позволяет манипулировать внешней средой с достаточной ловкостью, а также использовать 1 дополнительную степень избыточности для непредвиденных ограничений окружающей среды в пространстве задач. Длины сегментов робота WALK-MAN и диапазон значений углов поворотов шарниров представлены на рис. 6, из которого видно, что руки по отношению к телу достаточно длинные, таким образом, разработчики, согласно источнику [16, с. 37], хотели увеличить рабочее пространство для манипуляций и, в частности, для уменьшения расстояния рук от земли. Такая длина рук при большом росте упрощает доступ к объектам, находящимся на небольшой высоте, и позволяет производить захват при небольших изменениях положения корпуса. Также были выдвинуты предположения, что удлиненные руки будут более эффективны при достижении земли или внешней среды во время восстановления балансировки для предотвращения сбоев.
Рис. 6. Габаритные размеры робота WALK-MAN
Общий вес робота WALK-MAN составляет 132 кг, из которых 14 кг составляет вес силового агрегата, а 7 кг – вес конструкции защитной дуги вокруг туловища и головы.
Конструкция робота WALK-MAN позволяет получить:
– высокое соотношение мощности и веса и уменьшенную инерцию ног для максимизации динамических характеристик;
– большой диапазон движений суставов для достижения движений человека;
– повышенную физическую выносливость.
Для оптимизации конструкции, направленной на вышеуказанные задачи и максимизацию физических характеристик, следует внести конструктивные особенности в выбор кинематической структуры, расположение приводов и их интеграцию с конструкцией (для увеличения диапазона движений), уменьшение массы и инерции конечностей и формирование распределения массы ног (для улучшения динамических характеристик). Физическая прочность обеспечивается благодаря интеграции эластичных покрытий, передающих и поглощающих энергию удара.
Одна из ключевых технологий робота WALK-MAN – это серия приводов Elastic High-End Actuation (SEA), которая была специально разработана для целей проекта. У новой модели высокая удельная мощность и хорошая устойчивость при ударах, технические характеристики робота в зависимости от выбора двигателя представлены на рис. 7.
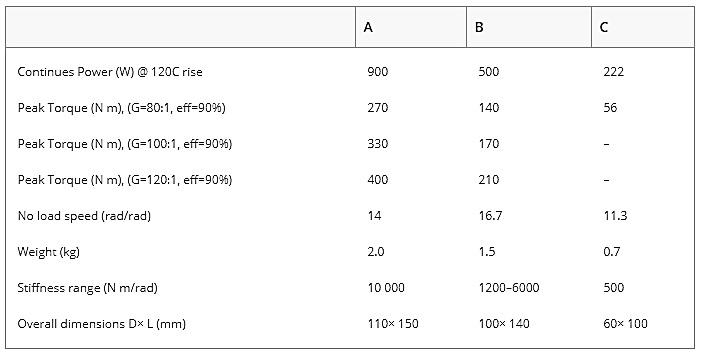
Рис. 7. Технические характеристики робота WALK-MAN при различных типах двигателя
Мощность от исполнительного устройства передается на все шарниры с помощью распределенного дифференциального механизма. Система распределения использует структуру на основе сухожилий человека, которая соединяет все суставы руки. Физические характеристики взаимодействия улучшаются из-за активной и пассивной адаптации, благодаря системе, которая сочетает в себе высокопроизводительные модули с настроенными кривыми крутящего момента / скорости и эластичностью трансмиссии для высокоскоростной реакции адаптации и реакции движения на возмущения.
Кисть комплекса приводится в действие двигателем KollMorgen мощностью 30 Вт с редуктором Harmonic Drive HFUC ‐ 8‐100 с передаточным числом 100:1. Система привода воздействует на волоконную связку Dynema диаметром 0,8 мм и максимальной прочностью 1100 Н, материал для кисти – высокопрочный алюминиевый сплав, электронные платы размещены в соединении запястья под защитой рамы из алюминиевого сплава, пальцы и ладонь покрыты специальной мягкой резиновой оболочкой. Общий вес составляет примерно 1.3 кг. При силовом захвате ладонь способна оказывать максимальное статическое усилие захвата от 80 до 150 Н и максимальный статический момент захвата ‑ от 2 до 5 Нм, максимальная статическая вертикальная подъемная сила равна 160 Н.
Основные проблемы робота WALK–MAN[17, с. 37]:
Большой вес робота замедляет систему, уменьшая скорость работы.
При предложенной разработчиками конфигурации РТС, недостаточно хорошие физические характеристики верхних конечностей для стабильной работы и выполнения поставленных задач.
Также использование РТК затрудняется из-за его долгого быстродействия, что приводит к плохой эффективности выполняемых действий.
Робот ASIMO, Япония
После аварии на АЭС Фукусима-1, японская компания продемонстрировала усовершенствованную модель человекоподобного робота ASIMO, оценивающего окружающую среду и взаимодействующего с ней, а также предсказывающего действия людей, внешний вид РТС представлен на рис. 8.
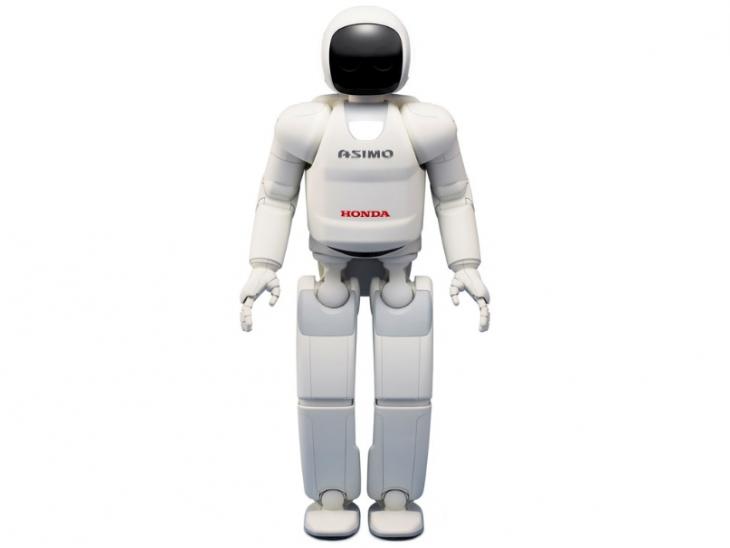
Рис. 8. Внешний вид робота ASIMO
Согласно официальным техническим данных компании Honda [18, с. 37], конфигурация модели ASIMO представляет собой систему с 57 степенями свободы, которые помогают ей ходить и выполнять задачи, имитируя деятельность человека, степени свободы показаны на рис. 9. Одна степень свободы обеспечивает оптимальное движение и гибкость в суставах конечности. Сама конструкция выполнена из магниевого сплава, а техническое оснащение содержит в своем арсенале мощные компьютеры и 57 серводвигателями, что позволяет роботу двигаться плавно и легко.
Габаритные размеры модели робота и основные характеристики комплекса представлены на рис. 10.
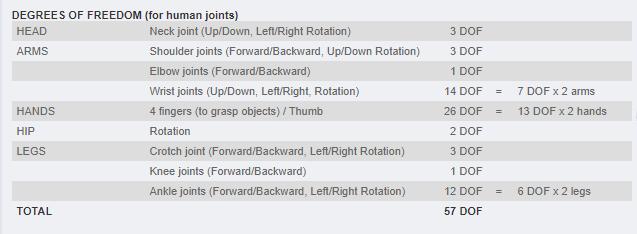
Рис. 9. Демонстрация степеней свободы по сочленениям робота ASIMO
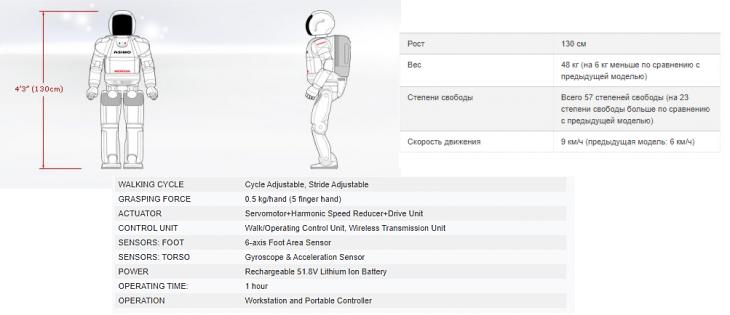
Рис. 10. Характеристики робота ASIMO
Согласно источнику [19, с. 37], габариты робота равны 0.45 м х 0.34 м. Время работы: 40 минут во время бега, но возможно более длительное время работы благодаря функции независимой самозарядки. В данной конфигурации используется литий-ионная батарея. Характеристики двигателя продемонстрированы на рис. 11.
Рис. 11. Характеристики двигателей робота ASIMO
Недостатки модели ASIMO[20, с. 37]:
Несмотря на достижения в области стабильной динамической ходьбы для многих гуманоидных роботов, была достигнута относительно небольшая автономия навигации. Так, например, у некоторых антропоморфных моделей отсутствует возможность автономного выбора положения ступни для обхода препятствий при ходьбе. Также присутствует проблема расстановки ног в недетерминированной среде.
Недостаточно хороший источник энергии [20] относительно примеров спасательных операций.
Эффективность антропоморфных роботов зависит от функциональности антропоморфного захвата. Допустимый объем использования двигателей и его ограничения – основные проблемы при разработке захвата.
В таблице 2 приведен сравнительный анализ двуногих шагающих моделей. В таблице 3 подведен промежуточный итог анализа антропоморфных шагающих роботов.
Таблица 2. Сравнительный анализ антропоморфных шагающих роботов.
Таблица 3. Анализ антропоморфных шагающих роботов.
Робот Isopod, ‑
Разрабатываемый русским конструктором Игорем Лобановым, робот Isopod представляет собой небольшое устройство с камерой и средствами аудио- и видеосвязи, предназначенного для проведения разведки в районах стихийных бедствий.
Насколько известно, реального примера такого робота пока не существует, на данный момент, это только концепт, представленный на рис. 12.

Рис. 12. Внешний вид робота Isopod
РоботQRoSS, Япония
Конструкция представляет собой шагающий четвероногий робот со сферической оболочкой, которую можно наблюдать на рис. 13 [21, с. 37]. РТС «QRoSS» – это робот-трансформер, который может держать свои ноги в сферической оболочке. Оболочка не только поглощает внешние силы со всех сторон, но и повышает мобильность благодаря своей круглой форме. При проведении спасательных операций на месте бедствия таких роботов можно бросить внутрь.
Для проверки базовой мобильности был поведен эксперимент с ходьбой, используя походку ползанием. Эта походка – статическая ходьба по многоугольнику опоры. Если коэффициент заполнения походки уменьшался, робот не мог ходить устойчиво, так как положение центра тяжести отклонено от многоугольника опоры и его запас устойчивости становился слишком низким.
При достаточном коэффициенте заполнения, была достигнута стабильная походка, со скоростью, равной 0.03 м / с. Робот мог перемещаться в 4 основных классических направлениях независимо от направления тела. Максимальная длина шага составляла 120 мм, запас устойчивости у модели 13.1 мм, остальные характеристики представлены на рис. 14.
Минусы работы робота QRoSS:
Роботы-спасатели должны перемещаться из безопасной зоны в места проведения исследований. Это потребляет ограниченные ресурсы энергии, тем самым сокращая время работы.
Проскальзывание конструкции (и оболочки, и конечностей) при наклоне горизонтальной поверхности больше 20°.
Робот HydraulicQuadrupedRobot, США
Еще один достаточно популярный представитель шагающих роботов ‑ гидравлический четвероногий HyQ, представленный на рис. 15. Его вес составляет 75 кг, а высота достигает 1 м. Робот практически сразу продемонстрировал хорошее автономное преодоление ранее неизвестных препятствий.
Согласно работе [22, с. 37] модель представляет собой робота с гидравлическими конечностями, основанного на гибридном силовом управлении. РТК полностью управляется крутящим моментом и оснащен прецизионными кодировщиками суставов, камерой глубины (Asus Xtion) и блоком инерциальных измерений (MicroStrain). Физические характеристики модели представлены на рис. 16. Длина ног колеблется от 0.339 до 0.789 м, а расстояние между бедрами спереди и сзади составляет 0.75 м.
В изученной работе робот двигался со средней скоростью тела – 0.18 м/с, а максимально допустимое угловое ускорение вычисляется с использованием матрицы инерции корпуса HyQ, из вычислений которых получилось значение 0.11 рад / с2. Массы ног рассматриваемой модели составляют 8% веса робота.
Преодоление препятствия было проведено в работе [23, с. 37], в ней было выявлено, что максимальная высота ступеньки достигает 15 см, что является 20% длины ноги, при скорости 7–13 см / с.
Недостатки робота HyQ:
Для более эффективного и стабильного передвижения на ногах нужны интеллектуальные алгоритмы изменения жесткости в зависимости от походки робота и параметров окружающей среды.
Гидравлические системы чаще всего энергетически неэффективные, особенно при работе с постоянным давлением. Ошибка между желаемой и достигнутой опорой составляет 8 см, что все равно уменьшает вероятность успеха на ступеньках.
У такого робота присутствует потребность в точной экстероцептивной локализации внешней среды, которая может быть проблематичной в средах с недостаточными геометрическими или визуальными характеристиками.
Роботы Boston Dynamics Spot and SpotMini, США
Знаменитые роботы Boston Dynamics Spot и SpotMini, которые у всех на слуху и уже давно продемонстрировали способность преодолевать труднопроходимую местность, включая лестницы, с высокой скоростью, показаны на рис. 17. Однако информации об этой технологии и экспериментальной установке очень мало [23].

Рис. 17. Внешний вид роботов Spot (слева) и SpotMini (справа)
Серия Spot (Spot Classical) и SpotMini (Spot) – это четвероногие роботы, разработанные Массачусетской фирмой Boston Dynamics для коммерческого рынка и продвигаемые через онлайн-видео. Постоянные колебания домашней и офисной среды, как с точки зрения содержания, так и конфигурации представляют собой реальную проблему для компьютерного зрения, которое Spot и SpotMini используют для навигации [24, с. 37].
Эти роботы известны своими проворными рефлексами, подобными животным, они могут ходить, бегать рысью, избегать препятствий, подниматься по лестнице и нести на спине до 14 кг дополнительного оборудования [25, с. 37].
Согласно [24] работе РТС Boston Dynamics Spot весит 75 кг. Он может достаточно легко и спокойно подниматься по лестнице, открывать двери.
Boston Dynamics SpotMini имеет высоту 0.84 м, в общей сложности состоит из 17 шарниров и весит 30 кг, а ноги могут быть удлинены для эргономики робота. В одном из выпущенных видеороликах РТК скользит по бананам, специально установленным, чтобы продемонстрировать его способность вставать обратно без посторонней помощи. Известно, что скорость Spot составляет 1.6 м / с.
Для навигации и распознавания объектов Spot и SpotMini полагается на компьютерное зрение. «Испытательная лаборатория» Boston Dynamics оценивает распознавание объектов и пространственную ориентацию.
SpotMini обладает гораздо более компактными размерами и может быть оснащен, по желанию, многофункциональным “манипулятором”, позволяющим ему брать предметы и вставать при падении. Также, стоит учесть, SpotMini – самый тихий робот компании.
Недостатки роботов Spot and SpotMini
Модели не предназначены для коммерческого использования, они носят исключительно исследовательский характер.
Для использования их компьютерного моделирования необходимо устанавливать определенные основные истины об объектах и пространствах.
Робот Рысь-БП (БПМРБ400), Россия
Робот Рысь – это военная разработка, представлена на рис. 18. Одна из основных функций заключается в эвакуации убитых и раненых с поля боя [26, с. 37].

Рис. 18. Внешний вид робота Рысь-БП
Состав робота и платформы представлен ниже в выжимках технического задания. Длина робота ‑ около 2 м, высота модели составляет 1.2 м, вес ‑ не более 400 кг.
«Рысь-БП» — биоморфный робот на четырёх ногах. В планах инженеров вооружить его пулемётом и противотанковыми управляемыми ракетами. Данная РТС может использоваться в 3 направлениях: как робот разведки, как робот боевой поддержки и как робот для переноски грузов [27, с. 37].
Выдержка из технического задания робота Рысь:
Базовая платформа среднего мобильного биоморфного робота массой до 400 кг
Сокращенное наименование – БПМБР400.
В состав БПМРБ400 должны входить:
– платформа;
– аппаратура управления движением;
– система электропитания;
– аппаратура подъёма робота после опрокидывания;
– программный комплекс.
В состав платформы должны входить:
– корпус;
– 4 рычажных движителя;
– приводы движителей.
Целевая нагрузка определяет функциональное назначение.
На БПМБР400 должна устанавливаться одна из целевых нагрузок:
– средства разведки;
– платформа перевозки боеприпасов и амуниции;
– средства эвакуации убитых и раненых с поля боя;
– средства разведки минно-взрывных заграждений;
– средства вооружения.
При установке на БПМБР400 платформы перевозки боеприпасов и амуниции общая масса боеприпасов и амуниции должна быть до 200 кг.
БПМБР400 с установленными системами и аппаратурой управления и целевой нагрузкой, в том числе с загруженной платформой перевозки боеприпасов и амуниции, должен обеспечивать:
– передвигаться по любым поверхностям;
– по воде глубиной до 40 см;
– порогов высотой до 500 мм;
– скорость движения полностью оснащенного с полезной нагрузкой:
– до 15 км/ч при движении по равнинной местности;
– до 10 км/ч при движении по пересеченной местности.
– адаптацию положения опорных поверхностей комплекса, в соответствии с рельефом местности в автоматическом режиме;
Управление функционированием БПМБР400 должно осуществляться от бортовой информационно-управляющей системы и аппаратуры планирования маршрутов и перемещений в режимах управления движением: дистанционном, полуавтономном, автономном и следования за маяком (поводырем).
Масса оснащенного и заправленного МБР400 должна быть не более 400 кг.
Общая масса боеприпасов и амуниции транспортируемая МБР400 должна быть до 200 кг.
Габаритные размеры БПМБР400 без целевой нагрузки и антенн должны быть не более:
– в боевом положении – не более 2000х1000х1200 мм;
– в транспортном положении – не более 2000х1000х600 мм.
В состав аппаратуры электропитания должны входить:
– автономный электроагрегат на двигателе внутреннего сгорания с дистанционным управлением;
– аккумуляторные батареи;
– блоки управления, коммутации и защиты;
– топливный бак.
Должна обеспечиваться подзарядка аккумуляторных батарей при работе электроагрегата. Должна обеспечиваться зарядка аккумуляторных батарей от устройства зарядки (из состава ПДУ).
Должна обеспечиваться возможность электроснабжения МБР400 от бортсети ПДУ и от промышленной сети напряжением 380/220( 10%,-15%) В с частотой 50 1 Гц (ГОСТ 11295-65) через преобразователь напряжения, который должен входить в комплект ЗИП-Г.
Недостатки робота Рысь-БП:
Классические недостатки шагающих роботов, возможно, присутствуют, но корректно оценить систему нельзя, так как данные по большей части скрыты, ведь проект относится к военным разработкам.
Робот Centauro, Италия
Модель представляет собой робота-кентавра, разработанного исследователями-робототехниками из Итальянского технологического института. Данная модель предназначена для участия в операциях по поиску и спасению людей, пострадавших в результате стихийных бедствий и техногенных катастроф, и продемонстрирована на рис. 19.
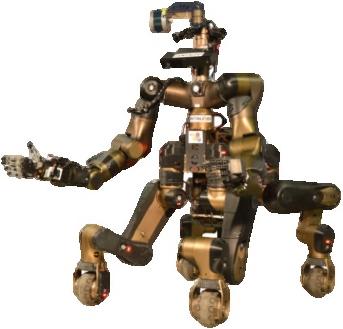
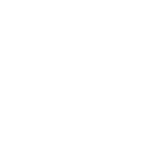
Рис. 19. Внешний вид робота Centauro
Четыре из шести конечностей оснащены колесами. Основный типом передвижения – является колесный способ, но можно переключиться на «шагающий» режим для прохождения одиночных препятствий и лестниц. Согласно данным из [28, с. 38] число степеней свободы составляет 42, вес 92 кг, длина/ширина равны 61 см, высота – 112 см (с согнутыми “ногами”) и 171 см в крайнем положении. Диапазон возможных перемещений приводов представлен на рис. 20, а на рис. 21 – основные характеристики приводов.
Основная подсистема зрения и восприятия робота ‑ это головной модуль, который размещается на верхней части туловища и включает в себя набор камер и датчиков. Он включает в себя:
‑ платформу подвижности с двумя степенями свободы для датчика Kinect 2 в нижнем слое для генерации рысканья и тангажа этого датчика RGB-D соответственно;
‑ структуру для массива из трех цветных камер (широкоугольные камеры PointGrey BlackFly BFLY-U3-23S6C) на среднем уровне для установки этих камер на основании головы;
‑ поддерживающую балку с одинарной глубиной резкости с непрерывным вращением для 3D-датчика LiDAR (датчик Velodyne PUCK) на верхнем слое, чтобы обеспечить сферическое покрытие окружающей среды вокруг робота.
Кроме того, под основанием РТК установлены две дополнительные камеры RGB-D, чтобы видеть его ноги. Также, обе руки могут быть оснащены боковыми камерами RGB или RGB-D в зависимости от задач и целей работы. Робот Centauro также включает в себя инерциальный измерительный блок, установленный в центре модуля торса, для контроля состояния торса с точки зрения ускорения и ориентации. Для повышения качества считывания и связи датчиков силы / крутящего момента в электронный модуль этих устройств добавлен более эффективный источник питания, обеспечивающий более низкий уровень шума и более высокую надежность связи при измерениях.
Недостатки робота Centauro
Универсальность мобильности увеличивает количество ограничений в управлении движением, где необходимо учитывать как свойства колесных, так и опорных (ножных) функций. В соответствующих схемах управления движением на ногах и колесах предпринимались попытки решить эту проблему путем использования раздельного управления движением колесных и опорных функций.
Строгий контроль за добавленными сверху руками-манипуляторами, иначе робот может опрокинуться из-за смещенного равновесия.
Робот Pleurobot, Швейцария
Исследуемый робототехнический механизм на рис. 22 напоминает саламандру и может быть использован в двух направлениях: помощь нейробиологам в разработке новых методов лечения больных с травмой спинного мозга и помощь в поисково-спасательных операциях. Саламандры напоминают древние окаменелости первых наземных позвоночных существ, благодаря такой особой форме врачи могут разрабатывать более эффективные методы реабилитации пациентов, которые не могут ходить. Также, имея такую форму, робот может перемещаться и проникать практически в любые места, вдобавок специально для него был создан плавательный костюм для спасения людей не только на суше, но и под водой.
Согласно работе [29, с. 38], РТС Pleurobot – это динамически масштабируемый робот-амфибия с большим количеством задействованных степеней свободы (всего 27 степеней свободы). Геометрические параметры и основные характеристики РТК представлены на рис. 23.
На рис. 24 обозначаются 27 моторизованных степеней свободы, а также обозначаются и две пассивные степени свободы (т.е. неактивированные свободные суставы, около задней левой конечности и самая крайняя ось хвоста). Результаты оптимизации позвоночника вместе с сегментированными конечностями позволяют имитировать различные походки, такие как ходьба, плавание и водные шаги. Конструкция робота состоит из трехмерных печатных деталей (белые), 27 стандартных серводвигателей (черные), силиконовые ножки и гибкий хвост. Водонепроницаемый купальный костюм из ткани Lycraw Nylon, ламинированной слоем полиуретана толщиной 1 мм, завершает конструкцию, позволяющую передвигаться как в земной, так и в водной среде.
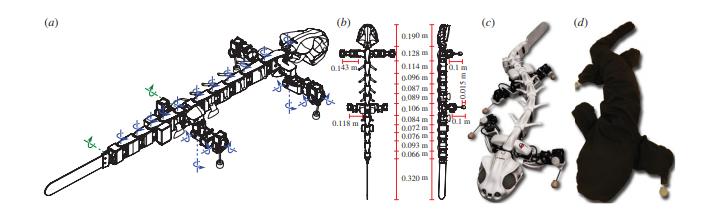
Рис. 24. Кинематическая схема робота Pleurobot
В работе [30, с. 38] скорость робота указана как значение 0.1745 м / с. Также важно отметить, что обработка информации от бортовых датчиков на конечностях робота сложнее колесных / летающих роботов.
Минусы работы робота Pleurobot
Модель имеет малую характеристику полезной нагрузки [31, с. 38].
В течение ходьбы у роботов на ногах появляется проскальзывание ног, которое ухудшает точность движения. Также из-за бокового к боковому движению сигналы датчиков колеблются [30].
Робот MessorIIrobot, Польша
Робот представляет собой шестиногую конструкцию, показанную на рис. 25. Каркас состоит из алюминиевых панелей и элементов, выполненных с помощью технологии 3D-принтера, как указано в исследовании [32, с. 38]. Конечность ноги выбрана трехзвенная, тогда длины сегментов ног соответствуют следующим значениям: 0.049 м, 0.120 м, 0.174 м.
Рис. 25. Внешний вид Messor II
Робот следующего поколения Messor II может нести более сложные датчики и выполнять сложные задачи. В первом эксперименте работы были задействованы локомотивные функции РТС. Затем были разработаны алгоритмы подъема по лестнице и по преодолению других городских препятствий. Кроме того, было проведено исследование оптимизации позы.
В каждом шарнире установлены серводвигатели, которые позволяют задавать исходную конфигурацию робота. Соответствие поведения РТК на пересеченной местности достигается с помощью контактных датчиков, прикрепленных к каждой ноге. При движении изменятся значение максимального крутящего момента, прилагаемого каждым серводвигателем, что позволяет снизить неожиданный удар о землю.
Робот оснащен системой ориентации и направления (AHRS) XSens MTi, которую можно использовать для определения местоположения и стабилизации платформы во время движения на пересеченной местности. Основным датчиком, используемым для навигации, является датчик Asus Xtion, установленный на верхней части платформы.
Данные, необходимые для локализации робота и плотного картографирования, предоставляются датчиком RGB-D. Алгоритм локализации использует как изображения RGB, так и изображения глубины.
Проблематика робота Messor II
Нога робота Messor II имеет 3 степени свободы (степеней свободы), поэтому можно установить положение только кончика стопы.
Вращательная часть зависит от выбранного положения и устанавливается при вычислении обратной кинематики, но на практике робот имеет сферические и эластичные ножки, которые могут вращаться и пассивно адаптироваться к наклону местности.
Также одна из основных проблем – необходимость постоянной локализации.
Робот ANYmalC, Швейцария
Компания ANYbotics к 2023 году представила обновленную водонепроницаемую версию своего четвероногого робота, так например, в данную версию были добавлены новые встроенные датчики для навигации [33, c. 38]. Ученые смогли заставить робота двигаться со скоростью 1 м / с, а также выполнять различные задания в течение 2 часов. Новой функцией является возможность самостоятельного возврата к зарядке при разряжении аккумулятора и функция автоматического сообщения о данной ситуации. Также последняя модель во время стыковки для автономной подзарядки получила возможность инспекционной полезной нагрузкой в качестве опции.
Новая версия поддерживается на трёхсегментной ноге, каждая часть которой соединена мощными сервоприводами, помогающая переносить дополнительный груз массой до 10 кг. Робот сконструирован из единого легкого корпуса из углеродного волокна с 12 идентичными шарнирными узлами. Последний внешний вид модели представлен на рис. 26. Новая представленная и рассматриваемая версия была переработана с акцентом на повышение производительности в отношении срабатывания (новые приводы), вычислительной мощности (новые Hexacore Intel i7), навыков передвижения и навигации, а также автономности (новые камеры глубины). Дизайн описываемой модели гораздо более интегрирован, чем его предшественник, что увеличивает как производительность, так и надежность.
Габариты РТС действительно небольшие, 1.05х0.5х0.83 м в обычном состоянии, а для преодоления невысоких проемов высота может уменьшаться до 50 см, при массе в 50 кг [34, c. 38]. С помощью лидара в верхней части корпуса, а также камер по бокам, робот может ориентироваться на местности, создавая высокоточную трехмерную карту, в дополнение для помощи оператора установлены спереди и сзади широкоугольные камеры.
В работе [35, с. 38] говорится, что система регулируется по крутящему моменту и очень устойчива к импульсным нагрузкам во время бега или прыжков.
РТК приспособлен подниматься по лестнице с уклоном 45° или подниматься по поверхности с наклоном в 20°. Время автономности системы от одного заряда аккумулятора составляет от 2 до 4 часов. При минимальном заряде робот сам возвращается к станции зарядки. Эксплуатационные испытания шарнирных приводов показали, что полоса управления крутящим моментом составляет более 70 Гц, а для работы на полной скорости требуется менее 280 Вт, также была замечена высокая способность подавления помех. Структура строения тела робота представлена на рис. 27.
В качестве вычислительной техники используется компьютер с 3 высокопроизводительными процессорами, имеется возможность подключения дополнительных плат для возможности использования модуля с поворотной инфракрасной камерой и подсветкой.
Согласно данным источника [36, с. 38], такая конструкция и оснащение позволяет роботу определить температуру, давление воздуха, содержание газов, состояние почвы, а еще РТС может анализировать звуки и искать объекты, в добавок открывать двери, нажимать кнопки с помощью дополнительного рычага.
Изначально РТК предназначается для вспомогательных для человека работ, в основном это задачи удаленной проверки, когда необходимо перемещаться через сложную среду, в которую нежелательно отправлять человека, в не зависимости от причин, будь то моральные, этетические или же предположительно наносящие вред здоровью человека. Согласно идее разработчиков робот может пригодиться на обширной местности, например, на промышленных площадках, в лесной и болотистой местности, на мусорных полигонах и в разрушенных зданиях, для поисково-спасательных операций, для доставки посылок, контроля состояния автономных устройств и как развлекательный контент.
Данная система была показана в одном из эпизодов сериала «Секретные материалы» в 2023 году и даже пожимал «руку» президенту Швейцарии.
Недостатки робота ANYmal C
Несмотря на современные технологии, остается проблема выбора точек опоры в очень неровной и загроможденной окружающей среде. В алгоритмах управлении была замечена ошибка в обычной стойке, которая является для некоторых задач локальным минимумом, что ведет к неправильной работе и затруднениям при реализации действий.
По итогу, робот представляет собой очень сложную динамику с множеством скрытых внутренних состояний, к которым нет прямого доступа, именно такое строение усложняет проблему контроля РТК.
Работники компании продолжают изучать проблемы удаленного управления, особенно это касается задач, для которых необходима работа робота на больших расстояниях от человека-оператора.
Разработчики компании поставили себе цель в универсальности данной модели, тогда как найти оптимальные маневры для задач большой размерности достаточно сложно, а тем более настроить выполнение их на реальном роботе, на достойном уровне.
Робот LaikaGo, Китай
В 2023 году китайская компания Unitree Robotics показала свою версию SpotMini от Boston Dynamics для совместной работы по перевозке грузов, переноске человека, буксировке легкового коммерческого автомобиля и перетягиванию каната при групповом управлении [37, с. 38]. Модели LaikaGo своим именем отдают дань уважения собаке-космонавту Лайке – первому животному, выведенному на орбиту Земли, китайцы используют такое имя как символ открытия нового и расширения границ человеческих возможностей. Внешний вид китайского робота можно увидеть на рис. 28.
Каждая нога РТК состоит из 3 сервомоторов, а габариты устройства составляют 560х350х600 мм при весе 22-25 кг, в зависимости от комплектации и добавленных улучшений. По техническим возможностям он может переносить груз массой до 5 кг при скорости до 0.8 м / с и автономности на одном заряде бортового литий-ионного аккумулятора около 3-4 часов (емкость аккумулятора 13000 мАч).

Рис. 28. Внешний вид робота LaikaGo
Согласно документации [38, с. 38] поддерживается как автономное, так и ручное управление при помощи пульта с полностью контролируемым роботом движением ног. Также как и оригинал, устройство выдерживает боковые удары, незамедлительно реагирует на наклон поверхности благодаря трёхосевой системе стабилизации движения. В ходе экспериментальных тренировок было вычислено, что максимальное тяговое усилие равняется около 25 Н, а максимальный угол наклона склона для устойчивой ходьбы – 20°.
Система оснащена адаптивной интеллектуальной системой контроля положения и может стабильно работать на разных поверхностях в разных сферах применения (патрулирование территорий, поисково-спасательные операции, доставка товаров и прочее). Также платформа позволяет расширить комплектацию за счет любых дополнительных модулей (камеры, LIDAR, роботизированные руки, систему GPS и другие системы), при этом движение робота все равно остается «идеально» плавным, как сообщает техническая документация.
На данный момент стоимость робота составляет около 45 000 долларов США, но в планах у компании представить улучшенную модель, известную как Aliengo. Сообщается, что такая модель будет легче, чем существующая, будет использоваться более мощный процессор, а также будет добавлена встроенная в тело система компьютерного зрения.
Сложности работы робота LaikaGo
На данный момент первоначальная цель робота заключалась в создании исследовательской платформы для робототехников. Проект по большей части является открытым, и любой желающий может предложить свои идеи по новым навыкам, внеся соответствующие изменения в программное обеспечение и комплектацию.
В таблице 4 приведен сравнительный анализ многоногих шагающих моделей. В таблице 5 подведен промежуточный итог анализа многоногих шагающих роботов.
Таблица 4. Сравнительный анализ многоногих шагающих роботов.
Таблица 5. Анализ многоногих шагающих роботов.
Мягкий робот, США
Далее следует рассмотреть бесхребетные разработки, работа которых может производиться в тесноте. Недавно был представлен новый ползучий бионический мягкий робот [39, с. 38] на основе проволочного механизма, который может преодолевать препятствия лучше, чем перистальтический ползущий робот. Его внешний вид продемонстрирован на рис. 29.
В рассмотренной работе анализировались напряжения и деформации основной части робота, так как суставы и голени изготавливаются из твердых материалов, а бедра – из мягкой силиконовой резины. Бедро выдерживает нагрузку при сгибании, и его легко повредить от усталости. Таким образом, основной корпус робота важен для анализа моделирования. Габаритные характеристики указаны на рис. 30.
Когда робот ползет по земле, максимальный угол изгиба бедра составляет 45° при колебаниях циклического напряжения. Сустав между бедром и центром выдерживает допустимую максимальную нагрузку. Максимальное напряжение составляет 0.26635 МПа, максимальная деформация составляет 0.11768, усталостная долговечность бесконечна, минимальный коэффициент безопасности составляет 2.478, а расчетный предел усталости равен 0.66 МПа.
Недостатки мягкого робота:
Мягкий робот не гибридной конструкции для перемещения использует воздух под низким давлением. Такие роботы могут легко изгибаться, проникать в разные щели и не бояться повреждений, но также при достаточно точных расчетах ошибка позиционирования будет достаточно критичной. Также могут возникнуть проблемы с источником воздуха при передвижении.
Четвероногая конструкция дает устойчивость в движении, при этом ограничивая адаптивность робота.
Робот – гусеница, США
Новая методика (оптогенетика) позволила учёным создать биороботов, способных самостоятельно передвигаться и реагировать на световые воздействия. Миниатюрные робототехнические системы на рис. 31 приводятся в движение модульными кольцевыми формами, выращенными из клеток мыши и похожими на крошечные резинки для волос.
Мышечная ткань оборачивается вокруг напечатанного гибкого каркаса, длина которого от 6 миллиметров до 2 сантиметров. Таким образом, появляется возможность создавать биороботов разнообразных размеров и форм для различного применения. Соединяя любые два сустава напечатанного скелета, можно создать робота с несколькими ногами, управление которого будет осуществляться с помощью света, позволяющего контролировать направление движения системы. Примеры некоторых форм приведены на рис. 32.
Роботы, которые изучаются и создаются в работе [40, с. 38], более мягкие, и, как думают авторы этого исследования, дружелюбнее, то есть не из жесткого пластика и металла. Биогибридные роботы часто состоят из напечатанных на 3D-принтере каркасов, пронизанных выращенными в лаборатории мускулами, полученными из клеток мышей, насекомых и даже морских слизней.
В подкасте [41, с. 39] заметили, что, как и обычными РТК, биогибридными роботами можно управлять с помощью микроконтроллеров, но инженеры также наращивают мышцы, управляемые нейротрансмиттерами и световыми импульсами. Инженер Массачусетского технологического института (MIT) Рита Раман экспериментировала в своей работ [42, с. 39] с обоими типами биологических машин и даже создала биоботов, которые могут лечить себя после травмы и возвращаться к работе.
Также в этой работе средняя скорость движения биоботов Риты Раман 2-й группы упражнений составляет 312 ± 63 мкм / с. Стереолитографические системы основаны на процессе фотополимеризации или инициируемой светом полимеризации для создания трехмерных структур. В целом стереолитографические процессы можно разделить на две широкие категории методов, которые различаются по способу возбуждения и поглощения света, запускающего процесс полимеризации.
Биороботы, а также стереолитографические машины, основанные на облучении видимым светом, обладают преимуществом обеспечения точного пространственного и временного контроля кинетики реакции, поскольку они регулируются исключительно простотой манипулирования светом.
Недостатки роботов-гусениц:
Движение данных роботов основано на свете, в то время как при поисково-спасательных операциях часто происходят при недостаточном количестве света, что является значительным недостатком [43, с. 39].
Согласно данным из исследования [42], такая маленькая скорость роботов может быть критичной и нецелесообразной для спасательных операций.
Робот CRAM, США
Помимо работы с насекомыми и мышцами животных, ученые запускают в производство роботов, напоминающих своим передвижением животных, способных проникнуть в завалы из-за своих размеров. Исходя из опытов, таракан в сплющенном состоянии использует не свои лапы, а отростки на лапках. Используя полученные данные, исследователи из Калифорнийского университета создали робо-тараканов, пролезающих через зазор в 6 миллиметров благодаря переориентации ног, расположенных на рис. 33. Да и сами роботы невелики, их высота в обычном состоянии равна 7 миллиметрам, но при этом они способны выдерживать давление в 900 раз превышающее вес их тела.
И этот робот из исследований [44, с. 39] заползает, втискиваясь в пространство меньше половины его 7-миллиметрового размера высоты. Такой робот может быстро перемещаться через трещины, шириной 3.6 сантиметра, и достаточно прочен, чтобы нести на себе целый ряд датчиков, таких как камера, микрофон, датчик CO2 или датчик температуры.
Изучая американских тараканов, разработчики обнаружили новый для них способ передвижения («ползание ног с трением тела»), при котором единственные точки трения насекомого находятся на животе и спине. Используя ту же технику, CRAM может протискиваться сквозь завалы в поисках жертв катастрофы [44].
Таракан CRAM может точно определить местонахождение похороненного выжившего глубоко в куче обломков. В дальнейших планах авторов на работу этого робота были задачи по уменьшению размеров, по ходьбе по стенам, они хотели научить его лазить и заниматься другими делами, помогающими при спасательных операциях.
Проводились эксперименты с живыми тараканами, им нужно было пройти через узкие щели, затем ползли в пространствах, ограниченных вертикально двумя сложенными горизонтальными пластинами со скоростью около 60 см / с. Затем в таких же условиях оказывался робо-таракан, а их результаты и прохождение эксперимента сравнивались. Примеры проведения и результатов экспериментов расположены на рис. 34.
Недостатки робота Cram:
Рассматриваемая версия – всего лишь прототип, по которому проводились дополнительные исследования [45, с. 39]. Как признались сами авторы, конечности CRAM не многофункциональны, как и сам робот-прототип.
При прохождении очень узкую щель, на наименьшей высоте, животные испытывают наибольшее сжатие тела и трение, также как и в настоящее время, робот, соответственно, внутренняя оснастка должна соответствовать значениям максимально возможного сжатия.
Основным ограничением современных мягких роботов является то, что инженеры полагаются на мощность и / или управляющие сигналы, передаваемые через пневматические и / или электрические тросы, что делает их очень тяжелыми, например, 1.2 кг для его габаритов, что опасно для них.
В таблице 6 приведен сравнительный анализ шагающих моделей с альтернативными видами движителей. В таблице 7 подведен промежуточный итог анализа шагающих моделей с альтернативными видами движителей.
Таблица 6. Сравнительный анализ шагающих моделей с альтернативными видами движителей.
Таблица 7. Анализ шагающих моделей с альтернативными видами движителей.
Результаты исследования
Подводя итог вышеприведённому исследованию рынка шагающих роботов, можно сделать следующие выводы:
1. Окружающая природа продолжает вдохновлять людей на новые открытия в области робототехники. Благодаря изучению насекомых и животных процесс создания прототипов становится легче.
2. Каждая модель имеет ряд коррелирующих недостатков. Двуногие – габариты, неустойчивость, медлительность, многоногие – сложность систем, недостаток подходящих компонентов, проблемы энергозатратности.
3. Невозможность применяемости моделей. Многие модели имели большой потенциал, но дальше прототипов и конференций не проходили и не находили работы. Возможно, дело в финансировании, возможно, в сложности выполняемых задач и в сложности среды использования.
Основные результаты анализа представлены в таблице 8:
Таблица 8. Результаты сравнительного анализа шагающих роботов.
Выводы
Таким образом, результатом моего исследования является выявление современных проблем использования шагающих роботов для спасательных операций. Задача моей работы указать на недостатки имеющихся систем, обратить внимание на незаслуженно обделенные разработки, предложить варианты исправления возникающих проблем.
Данные результаты могут помочь будущим изобретателям обратить внимание на конкретные проблемы и их проработку, укажет на достоинства разработок, которые можно будет изучить и адаптировать в собственных работах. К сожалению, мои выводы ограничены статьями, докладами, презентациями работы моделей, к тому же, не учитывается разнообразие каждой группы по классификации шагающих роботов.
На основе приведенного анализа, мое дальнейшее исследование будет заключаться в проработке некоторых недостатков для разработки собственного РТК. Также в дальнейшем необходимо детальнее рассмотреть проблемы кинематики, динамики, механики, а также управления шагающих роботов.
Заключение
В результате проведенной работы были раскрыты определенные проблемы на конкретных моделях. Проблемы были выделены в логические группы и выявлены на основе экспериментов и состязаний с независимой точки зрения.
Таким образом, главная задача статьи по анализу существующих решений была выполнена. Основные проблемы антропоморфных роботов – их неустойчивость и медлительность, для шагающих роботов с большим количеством ног – отсутствие надежных компонентов, энергозатратность. Также большой проблемой современного общества является малая применяемость разрабатываемых теорий и прототипов на практике.
По моему мнению, данное исследование поможет разработчикам обратить внимание на важные недостатки и определенные достоинства конкретных шагающих роботов, что позволит им сократить время на существенные доработки и изменения в прототипах и своих научных работах. Предложенный в статье анализ позволяет упростить трудоемкий ручной процесс исследования существующих и используемых РТК, дифференцируя интерес к определенной группе шагающих роботов, не упуская возможности обратить внимания на преимущества и возможные последующие адаптации других изученных в данной статье моделей.
Библиография
| . | ‘Staggering’ rise in climate emergencies in last 20 years, new disaster research shows: UN Report. URL: https://news.un.org/en/story/2020/10/1075142 (дата обращения: 03.01.2023). |
| . | Стихийное бедствие: Википедия. Свободная энциклопедия. URL: https://radiocopter.ru/wiki/стихийное бедствие (дата обращения: 17.01.2023). |
| . | Шахворостов, С. А. Роботы в системах автоматизации: учеб. пособие Красноярск: Научно-инновационный центр, 2023. 110 с. |
| . | О состоянии защиты населения и территорий Российской Федерации от чрезвычайных ситуаций природного и техногенного характера в 2023 г.: государственный доклад. URL: https://www.mchs.gov.ru/dokumenty (дата обращения: 05.02.2023). |
| . | Giant robot helps prevent landslides: ESA Report. URL: https://www.esa.int/Applications/Telecommunications_Integrated_Applications/Technology_Transfer/Giant_robot_helps_prevent_landslides (дата обращения: 07.02.2023). |
| . | Роботы в помощь спасателям: отчет МЧС России. URL: https://www.mchs.gov.ru/deyatelnost/press-centr/novosti/4381735 (дата обращения: 22.01.2023). |
| . | Создан Пожарный Робот-змея ANNA KONDA. URL: https://www.pogar-bezopasnost.ru/news/1940-anna-konda (дата обращения: 22.01.2023). |
| . | Kenji K., Morisawa M., Kajita S., Nakaoka S., Sakaguchi T., Cisneros R., Kanehiro F. Humanoid Robot HRP-2Kai-Improvement of HRP-2 towards Disaster Response Tasks, 2023 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). |
| . | Kajita S., Benallegue M., Cisneros R., Sakaguchi T., Morisawa M., Kaminaga H., Kumagai I., Kaneko K., Kanehiro F. Position-Based Lateral Balance Control for Knee-Stretched Biped Robot, 2023 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids). |
| . | Kojima K., Karasawa T., Kozuki T., Kuroiwa E., Yukizaki S, Iwaishi S., Ishikawa T. Development of Life-sized High-Power Humanoid Robot JAXON for Real-World Use, 2023 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). |
| . | Takasugi N., Kojima K., Nozawa S., Sugai F., Yohei K., Okada K., Inaba M. Extended three-dimensional walking and skating motion generation for multiple noncoplanar contacts with anisotropic friction: Application to walk and skateboard and roller skate, 2023 IEEE Robotics and Automation Letters, 2023 , vol. 4, no.1, pp. 9 – 16. |
| . | Kajita S., Benallegue M., Cisneros R., Sakaguchi T., Nakaoka S., Morisawa M., Kaminaga H. Biped Gait Control based on Spatially Quantized Dynamics, 2023 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids). |
| . | Curtis, S. Could these humanoid robots be the future of emergency response and disaster relief? URL: https://www.mirror.co.uk/news/technology-science/technology/humanoid-disaster-relief-robots-steal-6946098 (дата обращения: 12.01.2023). |
| . | Kumagai I., Ueda R., Sugai F., Nozawa S., Kakiuchi Y., Okada K., Inaba M. Achievement of localization system for humanoid robots with virtual horizontal scan relative to improved odometry fusing internal sensors and visual information, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
| . | Shigematsu R., Komatsu S., Kakiuchi Y., Okada K., Inaba M. Lifting and Carrying an Object of Unknown Mass Properties and Friction on the Head by a Humanoid Robot, 2023 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids). |
| . | Tsagarakis N. G., Caldwell D. G., Negrello F., Choi W., Baccelliere L., Loc V. G., Noorden J. WALK‐MAN: A High‐Performance Humanoid Platform for Realistic Environments, Journal of Field Robotics, 2023, vol. 34, no. 4, pp. 1-34. |
| . | Ackerman, E. New WALK-MAN Robot Is Slimmer, Quicker, Better at Quenching Your Flames, 2023, available at: https://spectrum.ieee.org/automaton/robotics/humanoids/new-version-of-walkman-is-slimmer-quicker-better-at-quenching-your-flames (дата обращения: 12.01.2023). |
| . | Asimo Specifications. URL: https://asimo.honda.com/asimo-specs/ (дата обращения: 09.02.2023). |
| . | ALL-NEW ASIMO Technical Information. URL: https://hondanews.eu/eu/fi/cars/media/pressreleases/35508/all-new-asimo#:~:text=All-New ASIMO has 22,advanced, multi-fingered hands.&text=The combination of strengthened legs,the middle of a motion (дата обращения: 09.02.2023). |
| . | ASIMO. URL: https://prezi.com/isnnpm6fwezx/asimo/ (дата обращения: 11.02.2023). |
| . | Aoki T., Asami K., Ito S., Waki S. Development of quadruped walking robot with spherical shell: improvement of climbing over a step. ROBOMECH Journal, 2020, no. 22, art. 22, available at: https://robomechjournal.springeropen.com/articles/10.1186/s40648-020-00170-5#rightslink (дата обращения: 13.02.2023). |
| . | Zhang X., Jiang X., Luo X., Chen X. Design of an Active Compliance Controller for a Bionic Hydraulic Quadruped Robot. ICIRA 2023: Intelligent Robotics and Applications, 2023, pp. 846-855. |
| . | Fankhauser P., Bjelonic M., Bellicoso C. D., Miki T., Hutter M. Robust Rough-Terrain Locomotion with a Quadrupedal Robot, 2023 IEEE International Conference on Robotics and Automation (ICRA). |
| . | Niquille, S. C. Regarding the Pain of SpotMini: Or What a Robot’s Struggle to Learn Reveals about the Built Environment, Architectural Design, 2023, vol. 89, no. 1, pp. 84-91. |
| . | Guizzo, E., Ackerman E. $74,500 will fetch you a spot: For the price of a luxury car, you can now buy a very smart, very capable, very yellow robot dog. IEEE Spectrum, 2020, vol. 57, no. 8. |
| . | Политов Р.Е., Рукавицын А.Н., Березина Л.В. Внедрение шагающих роботов // Школа юных инноваторов: Сборник научных статей Итоговой конференции проектов. Курск: ЗАО «Университетская книга», 2023. С. 302-305. |
| . | Бойко, А. Рысь (BPMBR400). URL: http://robotrends.ru/robopedia/rys (дата обращения: 05.01.2023). |
| . | Robust Mobility and Dexterous Manipulation in Disaster Response by Full body Telepresence in a Centaur-like Robot: project information, 2023. URL: https://cordis.europa.eu/project/id/644839 (дата обращения: 15.01.2023). |
| . | Karakasiliotis K, Thandiackal R, Melo K, Horvat T, Mahabadi NK, Tsitkov S, Cabelguen JM, Ijspeert AJ. From cineradiography to biorobots: an approach for designing robots to emulate and study animal locomotion. URL: http://dx.doi.org/10.1098/rsif.2023.1089 (дата обращения: 15.01.2023). |
| . | Parsapour M., Melo K., Horvat T., Ijspeert A. J. Challenges in visual and inertial information gathering for a sprawling posture robot, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
| . | Watkin, H. Pleurobot is 3D Printed Robot that Walks & Swims like a Salamander, 2023. URL: https://all3dp.com/pleurobot/ (дата обращения: 03.01.2023). |
| . | Szewczyk, R., Zieliński C., Kaliczyńska M. Progress in Automation, Robotics and Measuring Techniques: Volume 2 Robotics, 2023, available at: https://books.google.ru/books?id=XgcyBwAAQBAJ&pg=PA27&lpg=PA27&dq=messor 2 robot&source=bl&ots=lJkbmBDGsy&sig=ACfU3U3DKA3xi51qfG7k5JD8Oo6QYzxFdQ&hl=ru&sa=X&ved=2ahUKEwjKw5vko_fuAhUxx4sKHXNeByA4ChDoATAHegQIBRAD#v=onepage&q=messor 2 robot&f=false (дата обращения: 24.01.2023). |
| . | Четвероногий робот ANYmal прогулялся в озере России. URL: https://nplus1.ru/news/2020/11/30/anymal (дата обращения: 25.01.2023). |
| . | Швейцарцы представили водонепроницаемую версию четвероногого робота ANYmal. URL: https://nplus1.ru/news/2023/08/23/anymal-c (дата обращения: 25.01.2023). |
| . | Hutter M., Gehring C., Jud D., Lauber A., Bellicoso C. D., Tsounis V., Hwangbo J., Bodie K., Fankhauser P., Bloesch M., Diethelm R., Bachmann S., Melzer A., Hoepflinger M. ANYmal-A Highly Mobile and Dynamic Quadrupedal Robot Tasks, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
| . | Что умеет робот ANYmal — самая «умная» робособака в мире. URL: https://vc.ru/future/58418-chto-umeet-robot-anymal-samaya-umnaya-robosobaka-v-mire (дата обращения: 28.01.2023). |
| . | Китайцы показали, на что способны четвероногие роботы Laikago Pro, работая коллективно мире. URL: https://itc.ua/blogs/kitajczy-pokazali-na-chto-sposobny-chetveronogie-roboty-laikago-pro-rabotaya-kollektivno/ (дата обращения: 24.01.2023). |
| . | Laikago. URL: http://www.unitree.cc/e/action/ShowInfo.php?classid=6&id=1 (дата обращения: 24.01.2023). |
| . | Xu J., Liu B., Li K., Feng Y., Zheng H., Gao Y. Design and structure analysis of multi-legged bionic soft robot, 2020 International Conference on Advanced Mechatronic Systems (ICAMechS). |
| . | Ricotti L., Trimmer B., Feinberg A. W., Raman R., Parker K. K., Bashir R., Sitti M., Martel S., Menciassi P.D., Menciassi A. Biohybrid actuators for robotics: A review of devices actuated by living cells. Science Robotics, 2023, vol. 2, issue 12 |
| . | Raman, R. For These Robots, Squishy Is Superior / R. Raman, V. Webster-Wood, B. Trimmer, 2023. URL: https://www.sciencefriday.com/segments/for-these-robots-squishy-is-superior/ (дата обращения: 09.02.2023). |
| . | Raman R. 3D printed muscle-powered bio-bots: dissertation: дис., канд. технич.наук. 2023 University of Illinois at Urbana-Champaign, 2023. |
| . | Ahlberg L. Light illuminates the way for bio-bots, 2023, available at: https://news.illinois.edu/view/6367/338997 (дата обращения: 12.01.2023). |
| . | Abaffy L. Foldable Disaster-Rescue Robot Mimics a Cockroach, available at: https://www.enr.com/articles/38830-foldable-disaster-rescue-robot-mimics-a-cockroach (дата обращения: 07.02.2023). |
| . | Sanders, R. Cockroach inspires robot that squeezes through cracks, 2023, available at: https://news.berkeley.edu/2023/02/08/cockroach-inspires-robot-that-squeezes-through-cracks/ (дата обращения: 22.01.2023) |
References
| . | ‘Staggering’ rise in climate emergencies in last 20 years, new disaster research shows: UN Report. URL: https://news.un.org/en/story/2020/10/1075142 (data obrashcheniya: 03.01.2023). |
| . | Stikhiinoe bedstvie: Vikipediya. Svobodnaya entsiklopediya. URL: https://radiocopter.ru/wiki/stikhiinoe bedstvie (data obrashcheniya: 17.01.2023). |
| . | Shakhvorostov, S. A. Roboty v sistemakh avtomatizatsii: ucheb. posobie Krasnoyarsk: Nauchno-innovatsionnyi tsentr, 2023. 110 s. |
| . | O sostoyanii zashchity naseleniya i territorii Rossiiskoi Federatsii ot chrezvychainykh situatsii prirodnogo i tekhnogennogo kharaktera v 2023 g.: gosudarstvennyi doklad. URL: https://www.mchs.gov.ru/dokumenty (data obrashcheniya: 05.02.2023). |
| . | Giant robot helps prevent landslides: ESA Report. URL: https://www.esa.int/Applications/Telecommunications_Integrated_Applications/Technology_Transfer/Giant_robot_helps_prevent_landslides (data obrashcheniya: 07.02.2023). |
| . | Roboty v pomoshch’ spasatelyam: otchet MChS Rossii. URL: https://www.mchs.gov.ru/deyatelnost/press-centr/novosti/4381735 (data obrashcheniya: 22.01.2023). |
| . | Sozdan Pozharnyi Robot-zmeya ANNA KONDA. URL: https://www.pogar-bezopasnost.ru/news/1940-anna-konda (data obrashcheniya: 22.01.2023). |
| . | Kenji K., Morisawa M., Kajita S., Nakaoka S., Sakaguchi T., Cisneros R., Kanehiro F. Humanoid Robot HRP-2Kai-Improvement of HRP-2 towards Disaster Response Tasks, 2023 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). |
| . | Kajita S., Benallegue M., Cisneros R., Sakaguchi T., Morisawa M., Kaminaga H., Kumagai I., Kaneko K., Kanehiro F. Position-Based Lateral Balance Control for Knee-Stretched Biped Robot, 2023 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids). |
| . | Kojima K., Karasawa T., Kozuki T., Kuroiwa E., Yukizaki S, Iwaishi S., Ishikawa T. Development of Life-sized High-Power Humanoid Robot JAXON for Real-World Use, 2023 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). |
| . | Takasugi N., Kojima K., Nozawa S., Sugai F., Yohei K., Okada K., Inaba M. Extended three-dimensional walking and skating motion generation for multiple noncoplanar contacts with anisotropic friction: Application to walk and skateboard and roller skate, 2023 IEEE Robotics and Automation Letters, 2023 , vol. 4, no.1, pp. 9 – 16. |
| . | Kajita S., Benallegue M., Cisneros R., Sakaguchi T., Nakaoka S., Morisawa M., Kaminaga H. Biped Gait Control based on Spatially Quantized Dynamics, 2023 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids). |
| . | Curtis, S. Could these humanoid robots be the future of emergency response and disaster relief? URL: https://www.mirror.co.uk/news/technology-science/technology/humanoid-disaster-relief-robots-steal-6946098 (data obrashcheniya: 12.01.2023). |
| . | Kumagai I., Ueda R., Sugai F., Nozawa S., Kakiuchi Y., Okada K., Inaba M. Achievement of localization system for humanoid robots with virtual horizontal scan relative to improved odometry fusing internal sensors and visual information, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
| . | Shigematsu R., Komatsu S., Kakiuchi Y., Okada K., Inaba M. Lifting and Carrying an Object of Unknown Mass Properties and Friction on the Head by a Humanoid Robot, 2023 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids). |
| . | Tsagarakis N. G., Caldwell D. G., Negrello F., Choi W., Baccelliere L., Loc V. G., Noorden J. WALK‐MAN: A High‐Performance Humanoid Platform for Realistic Environments, Journal of Field Robotics, 2023, vol. 34, no. 4, pp. 1-34. |
| . | Ackerman, E. New WALK-MAN Robot Is Slimmer, Quicker, Better at Quenching Your Flames, 2023, available at: https://spectrum.ieee.org/automaton/robotics/humanoids/new-version-of-walkman-is-slimmer-quicker-better-at-quenching-your-flames (data obrashcheniya: 12.01.2023). |
| . | Asimo Specifications. URL: https://asimo.honda.com/asimo-specs/ (data obrashcheniya: 09.02.2023). |
| . | ALL-NEW ASIMO Technical Information. URL: https://hondanews.eu/eu/fi/cars/media/pressreleases/35508/all-new-asimo#:~:text=All-New ASIMO has 22,advanced, multi-fingered hands.&text=The combination of strengthened legs,the middle of a motion (data obrashcheniya: 09.02.2023). |
| . | ASIMO. URL: https://prezi.com/isnnpm6fwezx/asimo/ (data obrashcheniya: 11.02.2023). |
| . | Aoki T., Asami K., Ito S., Waki S. Development of quadruped walking robot with spherical shell: improvement of climbing over a step. ROBOMECH Journal, 2020, no. 22, art. 22, available at: https://robomechjournal.springeropen.com/articles/10.1186/s40648-020-00170-5#rightslink (data obrashcheniya: 13.02.2023). |
| . | Zhang X., Jiang X., Luo X., Chen X. Design of an Active Compliance Controller for a Bionic Hydraulic Quadruped Robot. ICIRA 2023: Intelligent Robotics and Applications, 2023, pp. 846-855. |
| . | Fankhauser P., Bjelonic M., Bellicoso C. D., Miki T., Hutter M. Robust Rough-Terrain Locomotion with a Quadrupedal Robot, 2023 IEEE International Conference on Robotics and Automation (ICRA). |
| . | Niquille, S. C. Regarding the Pain of SpotMini: Or What a Robot’s Struggle to Learn Reveals about the Built Environment, Architectural Design, 2023, vol. 89, no. 1, pp. 84-91. |
| . | Guizzo, E., Ackerman E. $74,500 will fetch you a spot: For the price of a luxury car, you can now buy a very smart, very capable, very yellow robot dog. IEEE Spectrum, 2020, vol. 57, no. 8. |
| . | Politov R.E., Rukavitsyn A.N., Berezina L.V. Vnedrenie shagayushchikh robotov // Shkola yunykh innovatorov: Sbornik nauchnykh statei Itogovoi konferentsii proektov. Kursk: ZAO «Universitetskaya kniga», 2023. S. 302-305. |
| . | Boiko, A. Rys’ (BPMBR400). URL: http://robotrends.ru/robopedia/rys (data obrashcheniya: 05.01.2023). |
| . | Robust Mobility and Dexterous Manipulation in Disaster Response by Full body Telepresence in a Centaur-like Robot: project information, 2023. URL: https://cordis.europa.eu/project/id/644839 (data obrashcheniya: 15.01.2023). |
| . | Karakasiliotis K, Thandiackal R, Melo K, Horvat T, Mahabadi NK, Tsitkov S, Cabelguen JM, Ijspeert AJ. From cineradiography to biorobots: an approach for designing robots to emulate and study animal locomotion. URL: http://dx.doi.org/10.1098/rsif.2023.1089 (data obrashcheniya: 15.01.2023). |
| . | Parsapour M., Melo K., Horvat T., Ijspeert A. J. Challenges in visual and inertial information gathering for a sprawling posture robot, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
| . | Watkin, H. Pleurobot is 3D Printed Robot that Walks & Swims like a Salamander, 2023. URL: https://all3dp.com/pleurobot/ (data obrashcheniya: 03.01.2023). |
| . | Szewczyk, R., Zieliński C., Kaliczyńska M. Progress in Automation, Robotics and Measuring Techniques: Volume 2 Robotics, 2023, available at: https://books.google.ru/books?id=XgcyBwAAQBAJ&pg=PA27&lpg=PA27&dq=messor 2 robot&source=bl&ots=lJkbmBDGsy&sig=ACfU3U3DKA3xi51qfG7k5JD8Oo6QYzxFdQ&hl=ru&sa=X&ved=2ahUKEwjKw5vko_fuAhUxx4sKHXNeByA4ChDoATAHegQIBRAD#v=onepage&q=messor 2 robot&f=false (data obrashcheniya: 24.01.2023). |
| . | Chetveronogii robot ANYmal progulyalsya v ozere Rossii. URL: https://nplus1.ru/news/2020/11/30/anymal (data obrashcheniya: 25.01.2023). |
| . | Shveitsartsy predstavili vodonepronitsaemuyu versiyu chetveronogogo robota ANYmal. URL: https://nplus1.ru/news/2023/08/23/anymal-c (data obrashcheniya: 25.01.2023). |
| . | Hutter M., Gehring C., Jud D., Lauber A., Bellicoso C. D., Tsounis V., Hwangbo J., Bodie K., Fankhauser P., Bloesch M., Diethelm R., Bachmann S., Melzer A., Hoepflinger M. ANYmal-A Highly Mobile and Dynamic Quadrupedal Robot Tasks, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). |
| . | Chto umeet robot ANYmal — samaya «umnaya» robosobaka v mire. URL: https://vc.ru/future/58418-chto-umeet-robot-anymal-samaya-umnaya-robosobaka-v-mire (data obrashcheniya: 28.01.2023). |
| . | Kitaitsy pokazali, na chto sposobny chetveronogie roboty Laikago Pro, rabotaya kollektivno mire. URL: https://itc.ua/blogs/kitajczy-pokazali-na-chto-sposobny-chetveronogie-roboty-laikago-pro-rabotaya-kollektivno/ (data obrashcheniya: 24.01.2023). |
| . | Laikago. URL: http://www.unitree.cc/e/action/ShowInfo.php?classid=6&id=1 (data obrashcheniya: 24.01.2023). |
| . | Xu J., Liu B., Li K., Feng Y., Zheng H., Gao Y. Design and structure analysis of multi-legged bionic soft robot, 2020 International Conference on Advanced Mechatronic Systems (ICAMechS). |
| . | Ricotti L., Trimmer B., Feinberg A. W., Raman R., Parker K. K., Bashir R., Sitti M., Martel S., Menciassi P.D., Menciassi A. Biohybrid actuators for robotics: A review of devices actuated by living cells. Science Robotics, 2023, vol. 2, issue 12 |
| . | Raman, R. For These Robots, Squishy Is Superior / R. Raman, V. Webster-Wood, B. Trimmer, 2023. URL: https://www.sciencefriday.com/segments/for-these-robots-squishy-is-superior/ (data obrashcheniya: 09.02.2023). |
| . | Raman R. 3D printed muscle-powered bio-bots: dissertation: dis., kand. tekhnich.nauk. 2023 University of Illinois at Urbana-Champaign, 2023. |
| . | Ahlberg L. Light illuminates the way for bio-bots, 2023, available at: https://news.illinois.edu/view/6367/338997 (data obrashcheniya: 12.01.2023). |
| . | Abaffy L. Foldable Disaster-Rescue Robot Mimics a Cockroach, available at: https://www.enr.com/articles/38830-foldable-disaster-rescue-robot-mimics-a-cockroach (data obrashcheniya: 07.02.2023). |
| . | Sanders, R. Cockroach inspires robot that squeezes through cracks, 2023, available at: https://news.berkeley.edu/2023/02/08/cockroach-inspires-robot-that-squeezes-through-cracks/ (data obrashcheniya: 22.01.2023) |
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Представленная на рецензирование статья посвящена изучению применения робототехнических спасательных комплексов, в том числе шагающих роботов, при проведении спасательных операций. Методология исследования базируется на изучении современных источников информации по рассматриваемой проблеме, обобщении и систематизации информации о применении робототехники в спасательных операциях.
Актуальность рецензируемой работы авторы связывают с возможностью и необходимостью применения роботов с шагающими движителями – роботизированных технических комплексов для проведения поисково-спасательных операций.
Научная новизна представленного исследования, по мнению рецензента, заключается в обобщении информации о существующих моделях шагающих роботов для спасения жизни и здоровья людей, снижения размеров вреда, наносимого окружающей среде и материальных потерь.
В структуре статьи выделены следующие разделы: Введение, Сферы применения робототехнических спасательных комплексов, Анализ спасательных шагающих роботов, Результаты исследования, Выводы, Заключение, а также библиографический раздел.
В статье приведено описание и представлены результаты сравнительного анализа различных моделей многоногих роботов: QRoSS, HyQ, BD Spot, BD SpotMini, Рысь-БП, Centauro, Pleurobot, Messor I, отражены их сильные стороны и имеющиеся недостатки. По результатам исследования сделаны выводы. К достоинствам статьи следует отнести обобщение обширной информации по теме публикации; анализ моделей роботов, спроектированных и изготовленных в различных странах мира; наглядность представления материалов.
В тексте статьи имеются адресные ссылки на используемые литературные источники, что свидетельствует о наличии апелляции к оппонентам. Стиль изложения материала в целом соответствует применяемым в научных журналах подходам, позволяет сориентироваться в излагаемом материале специалистам различных областей знания, текст доступен также для понимания широкому кругу читателей без специальной подготовки.
Однако, рецензируемая статья не лишена недоработок.
Во-первых, объем представленного материала представляется излишним для журнальной статьи, особенно это касается раздела «Анализ спасательных шагающих роботов». Да и общее количество таблиц (их 7) и рисунков (34) непропорционально велико в сравнении с объемом выводов, сделанных по результатам проведенного исследования.
Во-вторых, вряд ли стоит структурно выделять в статье и «Выводы», и «Заключение», поскольку в них по существу говорится об одном и том же.
В-третьих, требуется надлежащее размещение рисунков в тексте работы, поскольку в представленном виде некоторые из них полностью не представляется возможным изучить.
Актуальность темы статьи, ее соответствие тематике журнала «Кибернетика и программирование», ожидаемый интерес со стороны потенциальных читателей, систематизированное изложение материала о моделях шагающих роботов с их сравнительной характеристикой и сопоставительным анализом, представление материала в наглядном виде, свидетельствуют о возможности опубликования рецензируемой статьи.
Ссылка на эту статью
Просто выделите и скопируйте ссылку на эту статью в буфер обмена. Вы можете также
попробовать найти похожие
статьи
Универсальные законы космоса.
- По закону Чередования любая форма подлежит периодическому уничтожению, с сохранением идеи, которая облекается в форму более совершенную, чем предыдущая. Форма, в данном случае, — это наше физическое тело: оно утончается на атомарном уровне, постепенно уйдут болезни, возникавшие из-за низкочастотных вибраций. Мы многое научимся создавать мыслью и более совершенными техническими средствами, что даст возможность создавать все необходимые материальные блага без применения тяжелого физического труда и т.д.
2.По закону Жертвы нам помогают старшие братья по разуму: обучают, подсказывают, посылают огромное количество более высокочастотной энергии – энергии любви. Так же и на земле: дети, взращенные энергией любви родителей, сами способны передавать ее своим детям.
3.По закону Свободного выбора каждый выбирает для себя: хочет ли переходить на более высокий уровень сознательной жизни или еще желает побыть в спящем сознании – сознании «детского сада», где за тебя почти все решают (15% выбора), но и делать будешь то, что кто-то решит за тебя.
- Согласно закону Космического Единства вся материя в Космосе – это клетки единого живого организма. Дух есть очищенная материя. Материя есть уплотненный Дух. Выпадение малого звена из цепи мироздания ведет к хаосу и деструкции. Сейчас каждое звено в мироздании переходит на план выше. Если мы «выпадем» из этой цепочки, плохо будет всей иерархической цепочке планов Бытия: может быть разрыв. Этого не допустит Творец. Поэтому вся Галактика, да и Вселенная нам помогают. От нас ждут добровольного согласия на принятие помощи и посильный труд закрепления новых энергий Света на Земле.
5.По закону Аналогии каждое звено мироздания повторяет строение предыдущего. Макро и микрокосмосы тождественны. По отношению к жителям 5 измерения, мы – микрокосмос, по аналогии – наши клетки – наш микрокосмос, и мы, по подсказкам высших существ, сейчас пытаемся осознать жизнь в 5 измерении.
6.По закону Цикличности и Взаимопроникаемости: завершение старого более низкого цикла всегда совершеннее, чем начало нового, высшего по уровню. По сути происходящего на планете старое сознание всеми силами старается удержаться, а новое сознание медленно, но верно проникает во все сферы бытия.
Старое крепко держится, как коренной подгнивший зуб, но его все равно удалят, иначе весь организм погибнет. Все иерархические системы на планете созданы в уходящем времени, они античеловечны. В их рамках мы старались выживать. Считали это стабильной жизнью.
Сейчас все рушится. Мы пытаемся познать, что нас ждет в мире более высоких частот и медленно в него прорастаем, как маленький зелененький росточек на захламленной планете в мультфильме. Нам сейчас хуже, неуверенней, чем было до Перехода. Святые предупреждали об этом времени: терпение, Вера, Надежда, сострадание и Любовь помогут выстоять.
«Все священные племена на планете, самые важные цивилизации, развившиеся в этом мире, говорили о циклах, повторяющих сами себя, циклах изменения, иногда разрушения. Циклы разрушения совпадали с тем, когда человечество утрачивало этику и мораль по отношению к Земле.
7.Согласно закону Иерархии, каждое низшее звено Иерархической цепи подчинено высшему при сохранении полной индивидуальной свободы. Вся иерархическая цепь исполняет волю Единого Высшего Начала. Каждое звено в иерархической цепи не может быть выше стоящего над ним, но может достигнуть его уровня.
По нашим земным меркам рабочий не выше мастера, и выполняет его волю. Мастер не выше начальника, и выполняет его волю. Начальник не выше директора, и выполняет его волю. Директор не выше министра, и выполняет его волю. Министр не выше председателя правительства, и выполняет его волю.
8.По закону Преемственности развитие нового всегда приходит при исполнении старого. Эволюция всегда может происходить только при трансформации количества энергии предыдущего плана в качество последующего.
За время Эры Рыб наша задача была усвоить то Учение, которое принес Спаситель на Планету – Новый Завет. Насколько каждый из нас и вся цивилизация планеты в целом усвоили Его учение, настолько мы готовы к переходу на другой уровень Бытия в Эру Водолея.
9.По закону Объединенного творчества творческие идеи каждой мыслящей единицы создают объединенные поля сознания цивилизации. А творческие поля цивилизаций создают объединенное поле сознания Вселенной. Стремление к совершенству изначально заложено в каждом человеке Земли, имеющем образ Божий и стремящемся приобрести Его подобие через акт сотворчества. Вспомним призыв Христа к стремлению стать совершенным, как совершен Отец Небесный.
Каждая душа приходит в этот мир с определенной идеей. Все поколения планеты Земля развиваются по 12 разночастотным лучам – каналам. Каждый человек приходит в этот мир с каким-то количеством открытых каналов, соответственно набор талантов от рождения у всех разный.
10.Согласно закону Сохранения энергии любая информация, исходящая от мыслящей единицы, сохраняется в каждой молекуле пространства до конца планетарного цикла. Согласно этому Закону, Иисус Христос ушел к Отцу и одновременно остался в сердце каждого человека, верящего в Него. По этому Закону энергия святых навсегда остается на Земле, создавая защитную сеть над нашей планетой.
В мультфильме жители загаженной планеты, изнывая от скуки, путешествуют по просторам Вселенной. Это наивно. Никто не даст энергию жизни существам, ничего не отдающим взамен. Те, кто на нашей планете насильно взяли власть – пользуются нашей созидательной энергией.
На нашей планете, да и на других, по всей вероятности, тоже, существовали древние цивилизации, достигшие колоссального технологического прогресса. Но они начали терять связь со своими чувствами и эмоциями. Планета приходила в упадок: неправильное использование технологий, загрязнение мира, плохое распоряжение ресурсами, негативное распределение ресурсов между людьми, бесчувственность по отношению к другим обитателям планеты: не только к людям, но и к животным и к растительности.
Весь прогресс направлен на накопление большого богатства. Все это ведет к утрате чувствительности. Все вышеперечисленные факторы объединяются воедино и превращают людей в зомби. С нами все будет иначе, если мы вовремя успеем «пробудиться» и осознать.
Но более высокоразвитые технологически существа обращаются к нам, людям 3-х – 4-х мерного мира с пожеланием не повторить их ошибок, не утратить человечности. Они считают, что мы, человеческие существа, имеем ключ – потенциал, позволяющий мирно сосуществовать разным людям и другим существам, на одной планете.
На мой взгляд, этот потенциал заключается в особом строении нашего физического тела: у нас есть мозг и сердце. По сути это два центра управления нашим сознанием. Через мозг мы познаем Божий мир, а через сердце мы можем напрямую обратиться к Отцу Абсолюту (чистые сердцем Бога узрят).
Задачу цивилизации нашей планеты поставил Господь: «Воскресение мертвых и жизни будущего века». К ее выполнению нужно идти поэтапно, что и пытается делать президент: он определяет очередные задачи улучшения жизни людей. Задача думы создать законы для возможности выполнения наказов президента, для создания условий полноценной жизни, творческого развития людей, а правительству создать резонансную цепочку исполнения по всей иерархической цепи исполнительной власти.
В мультфильме роль организующей системы взяли на себя роботы. Видимо так было удобно людям – ни о чем не надо было задумываться. Но пришла пора «просыпаться». Как говорят мыслители: никто не может контролировать нас, пока мы сами не позволим им это сделать.
В настоящее время какие-то события происходят во всех странах. Это начало величайшего планетарного освобождения в космической истории, которое человечество давно ожидало. Вся галактическая разведка показывает, что конец земного 2020 года – это начало Золотого Века на планете Земля, предсказанного издревле.
Сроки позитивных изменений зависят во многом от коллективного сознания людей всей планеты.
«Мы знаем: время растяжимо. Оно зависит от того,
Какого рода содержимым вы наполняете его.
Бывают у него застои,
А иногда оно течет ненагруженное, пустое,
Часов и дней напрасный счет.
Пусть равномерны промежутки, что разделяют наши сутки,
Но, положив их на весы, находим долгие минутки
И очень краткие часы». С.Маршак
Мы – существа, которые могут творить. Мы подавлены бессмысленными законами и правилами. Это и есть главное загрязнение планеты, так как информация первична.


, цена 4600 руб")




