
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://radiocopter.ru/wp-content/uploads/2022/06/FNC2LVWJDOUP34Y.LARGE_-870x400.jpg "Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик")
- Дальнолет – мультикоптер. как я начал этот путь.
- Бортовой компьютер и сенсоры
- Безопасность
- Выбор полетного контроллера
- Квадрокоптер своими руками
- Комплектующие рамы
- Монтаж приемника
- Моторы и пропеллеры
- Моторы и пропеллеры
- Info
- Подключение моторов квадрокоптера: установка двигателей
- Полет
- Полетный контроллер
- Пролог
- Прошивка регуляторов оборотов в blhelisuite
- Сборка рамы
- Список к покупке:
Дальнолет – мультикоптер. как я начал этот путь.
Бортовой компьютер и сенсоры
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте.
• компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет). К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения;
• сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Выбор полетного контроллера
Так как мне нужно транслировать видео и телеметрию через интернет, то сразу приходит на ум поставить на дрон микрокомпьютер с 4G модемом и камерой, и сделать из этого комплекта web-трансляцию. Нашлись вот такие решения:
. Это обычные одноплатники с внешним USB 4G модемом и камерой. Для кодирования и трансляции видео используется
. Но эти штуки сами по себе дроном управлять не умеют, их нужно использовать совместно с полетным контроллером.
Полетный контроллер — это мозг дрона. Он следит за состоянием датчиков положения (гироскоп, акселерометр, компас), GPS-координатами, положением ручек на пульте управления и, исходя из этих данных, управляет моторами, чтобы висеть в одной точке или куда-то лететь.
Полетный контроллер нужно будет как-то связать с бортовым компьютером, чтобы можно было загрузить полетное задание или указать произвольную точку куда лететь и когда включать камеру. В продаже можно найти много разных контроллеров сильно отличающихся друг от друга по цене и функционалу.
С Ardupilot я игрался еще на 8-битных атмегах, в которых не было USB-bootloader’а, а прошивались они на программаторе. С тех пор с ним не сталкивался и был приятно удивлен, когда узнал, что сейчас он может работать на 64-битных компьютерах с Linux, у него огромное сообщество пользователей как хобби, так и профи, длинный список поддерживаемых “из коробки” датчиков и расписанные планы на 2023-2023 годы. За это время он успел перерасти в проект DroneCode, а потом и отсоединиться от него.
На первый взгляд в нем как раз реализованы все необходимые функции: автоматический взлет и посадка, загрузка полетных заданий, есть desktop и мобильные приложения под все основные семейства ОС. Программы управления (GCS — Ground Control Station) общаются с бортовым контроллером короткими сообщениями по открытому протоколу MAVLink через комплект радиомодемов (дрон шлет телеметрию, GCS шлет команды управления). Подозреваю, что эти сообщения получится пустить через интернет.
Взглянем на список поддерживаемых контроллеров и что-нибудь подберем. Вариантов там полтора десятка от мала до велика и с разными характеристиками.
Из всего того многообразия контроллеров мне понравилось несколько вариантов:
Самый легкий комплект (84 г) получается из микрокомпьютера
(9 г), контроллера
(15 г), родного внешнего GNSS модуля (46 г) и дополнительного
(14 г).
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://habrastorage.org/webt/2p/aw/tm/2pawtm7z82xszvowpsnageeuemo.jpeg)
Рабочий процессор в этом комплекте один — на Raspberry Pi. На нем висит управление ШИМ регуляторов моторов, считывание показаний датчиков, ОС Linux со всеми потрохами и декодирование видео с камеры. Так как в Pi Zero не предусмотрены USB порты, то в этом варианте приходится использовать внешний концентратор. IMU датчики и вход питания без резервирования.
Следующий комплект (97 г) от гонконгской компании с русскими фамилиями в команде разработчиков — контроллер Emlid Edge (59 г) с GNSS модулем (38 г). GNSS модуль работает по протоколу UAVCAN и дополнительно оснащен магнитометром и датчиком воздушного давления. За ШИМ здесь отвечает отдельный процессор ARM Cortex-M3, ОС Linux крутится на основном ARM Cortex-A53 quad-core.
В контроллере имеется HDMI видеовход, что позволяет подключить к нему напрямую любую камеру с таким выходом, например GoPro 4 или 5. Относительно высокая стоимость объясняется дальнобойными wifi-приемопередатчиками в комплекте (до 2 км с трансляцией HD-видео).
Следующий вариант (98 г) состоит из знаменитого микрокомпьютера Raspberry Pi 3 (45 г) с контроллером-шилдом Navio 2 (23 г) от той же Emlid и внешней GNSS-антенны (30 г). На контроллере стоит отдельный процессор Cortex-M3 для управления ШИМ на 14 каналах и расшифровки входящих SBUS и PPM сигналов от приемника. Он, в свою очередь, управляется через драйвер в ядре ОС Linux, которая крутится на Raspberry.
Контроллер оснащен парой раздельных IMU датчиков (акселерометр, гироскоп, магнитометр) MPU9250 и LSM9DS1, одним датчиком воздушного давления и GNSS-модулем U-blox NEO-M8N, который видит GPS, Глонасс и BeiDou с внешней антенной через разъем MCX.
Квадрокоптер своими руками
Существует много решений , как собрать свой квадрокоптер, но как показывает практика большинство людей
сталкивается с теми или иными проблемами при постройке квадрокоптера. Не имея представления как им управлять
и пытаться собрать хоббийный квадрокоптер, а это, как правило рама 450 класса – это очень затратно по деньгам.
Даже у меня первый самосборный квадрокоптер, без опыта полетов и опыта сборки
побывал в воздухе 5 секунд и разбился. Все из-за того, что мне не были понятны нюансы при сборке и настройке полетного
контроллера. Сборка квадрокоптера подразумевает , что у вас как минимум:
- Есть опыт в пилотировании хотя бы маленького квадрокоптера, например Hubsan X4 H107L
- Есть понимание принципов работы всех его узлов
- Вы ознакомлены с техникой безопасности (а это означает понимание,
что даже маленький квадрокоптер хорошо может поцарапать,
даже в руках детей это очень опасная игрушка). Не зря на коробке даже
маленького квадрокоптера написано, что для детей от 14 лет. Редко когда бывает исключение.
Поэтому исходя из вышеизложенного рекомендую не пожалеть и потратить деньги на маленьких 4-х канальный квадрокоптер
и научиться на нем как минимум: висеть в воздухе, летать по кругу, летать по “восьмерке”,
пролетать в разного рода щели, летать на улице в ветер и конечно же – летать лицом к себе.
После того как спустя месяц или два практики вы не забросите полеты – можно возращаться
на этот сайт и мы приступим к сборке уже настоящего хоббийного автономного квадрокоптера.
Переходя из класса в класс вы получаете опыт в пилотировании.
А когда время дойдет до квадрокоптера своими руками :
- Задумайтесь – лучше точный расчет деталей и комплектующих, чем непонятно что.
- Начните получать опыт в пилотировании с простого и маленького простого квадрокоптера готового к полету (RTF версия).
- Для тех кто с “руками” можно построить на основе рамы F450, хороший квадрокоптер, который мы опишем ниже.
- Первый квадрокоптер не должен быть для фото / видео или FPV – вы должны просто построить квадрокоптер и в первую очередь научиться летать.
- Даже если вы знаете , что вам действительно нужно вы должны понимать , что вам необходимо привыкнуть к управлению вашего квадрокоптера и его полетного контроллера.
- Если вы хотите получить массу удовольствий от управления начните с недорогого , безопасного , прочного и готового к полетам маленького квадрокоптера , такого как Hubsan X4 H107L.
- Если вы серьезно подошли к делу , то попробуйте ARF версию рамы для постройки или если вы хотите просто лететь и может себе это позволить – используйте RTF версию (готовый к полетам квадрокоптер).
- Не начинайте со сборки рамы, даже если у вас есть полная инструкция как построить действительно хороший квадрокоптер для акробатики и спорта.
- Не начинайте строить свою собственную раму; даже среди строителей больше неудач, чем успехов; не повторяйте их ошибки.
- Не начинайте с большого и опасного квадрокоптера с кучей фото или видео аппаратурой на нём – это очень опасно и вы будите сожалеть об этом.
- Небольшой и маневренный квадрокоптер всегда приносит больше удовольствия, чем большой, медленный и громоздкий гексакоптер или октакоптер (hexacopter octacopter).
- Для хорошей профессиональной сьемки или фотографии всегда требуются большие камеры, вам лучше думать о маленьком, легком и маневренным квадрокоптере.
- Безопасность полетов очень важна, держите безопасное растояние подальше от людей и дорогих вещей, не забудьте посетить страницу по безопасности.
Комплектующие рамы
- Как только вы соберетесь к постройке своими руками квадрокоптера вы получите хороший опыт в строительстве, но это уже не для новичков.
- Исключением являеся, если вы внимательно следуете инструкциям по сборке квадрокоптера.
- Об использованных методах постройки рам можно узнать из каждого “журнала постройки”.
- Есть достаточно интересные модели рам, которые не разрушаются, например спортивно-акрабатические рамы Hoverthings flip 380 sport frame.
- Эта рама использует жесткую и сильные карбоновые лучи которые обрабатываются на ЧПУ станке из толстоко стекловолокна.
- Это позволяет использовать те же моторы и регуляторы ESC, что и в раме F450 DJI c пропеллерами до 10 дюймов.
- Я купил Флип Sport Kit плюс дополнительная пара “вкладка” секций типа центр и дополнительных 7/8 “прокладками”.
- Рама позволяет размещать батарейку под основной платой специальными держателями.
- Так же использовать специальный регулятор 4-в-1 помещенному между центральными пластинами рамы.
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://ardupilot.su/images/3281_dimg2.jpg)
- Совмещенный регулятор ESC 4 в 1 ESC производит меньше помех и компактен, чем 4 обычных регулятора ESC и плата распределения питания.
- Я использую карбоновые 10 дюймовые пропеллеры, потому что они очень жесткие и очень эффективные.
- Моя цель заключается в создании еще более жесткого и более высокопроизводительного квадрокоптера, чем DJI F450.
- Хотя это небольшой квадрокоптер является мощным и достаточно гибким, чтобы использовать FPV видео и / или камеру GoPro с “подвесом”.
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://ardupilot.su/images/FlipPX41-1024x572.jpg)
- Рама Tarot 650 из карбона довольно большая и позволяет устанавливать пропеллеры до 17 дюймов.
- Я использую моторы 360kv медленной скорости и большого диаметра, которые предназначены для использования более эффективных и больших пропеллеров на низких скоростях.
- Я буду использовать разнообразные пропеллеры – от 14 до 17 дюймов, чтобы исследовать производительность и эффективность при различных размерах пропеллеров.
- Хотя акрабатический спортивный квадрокоптер 330, который показан выше может быть целесообразным для первого квадрокоптера этот Tarot 650, безусловно, нет.
- Это четырехмоторный аппарат достаточно велик, чтобы быть тяговитым и долгим в полете на выносливость и нести большую видео или фотокамеру, но:
- Для подъема полезной нагрузки в 2кг с квадрокоптером вам нужно уточнить конфигурацию моторов и пропеллеров.
- Четыре мотора Tigermotor MN4010 475KV стоимостью около $ 86 каждый, четыре 15 х 5 или 16 х 5 пропеллера и четыре высококачественных регулятора ESC 30А.
- Так же нужно 10000 мАч 4-х баночную Lipo батарейку (две 5000мАч) для достижения примерно 10 минут полетного времени на 4KG общего веса.
- Квадрокоптер способный поднять общую массу 4кг (включая 2кг полезной нагрузки) и уметь взлетать при 50% тяги (это необходимость по технике, а так же иметь возможность 6кг взлета).
- Вам понадобится 16х5 пропеллеры для достижения тяги и эффективности необходимые для подъема 4KG с разумным временем полета.
- Именно поэтому требутся большие двигатели с минимальным кВ, они должны быть высокого качества, что бы выдержать непрерывную высокую нагрузку производительности.
- Это настоятельно рекомендуется, что бы вы не пытались построить один из таких апаратов в качестве первого из непонятно чего.
- Есть очень полезная ссылка для расчета производительности различных мультикоптеров и их компонентов – калькулятор квадрокоптера: eCalc
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://ardupilot.su/images/41KrM7TlOGL.jpg)
Монтаж приемника
Приемник используется FrSky XM .
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: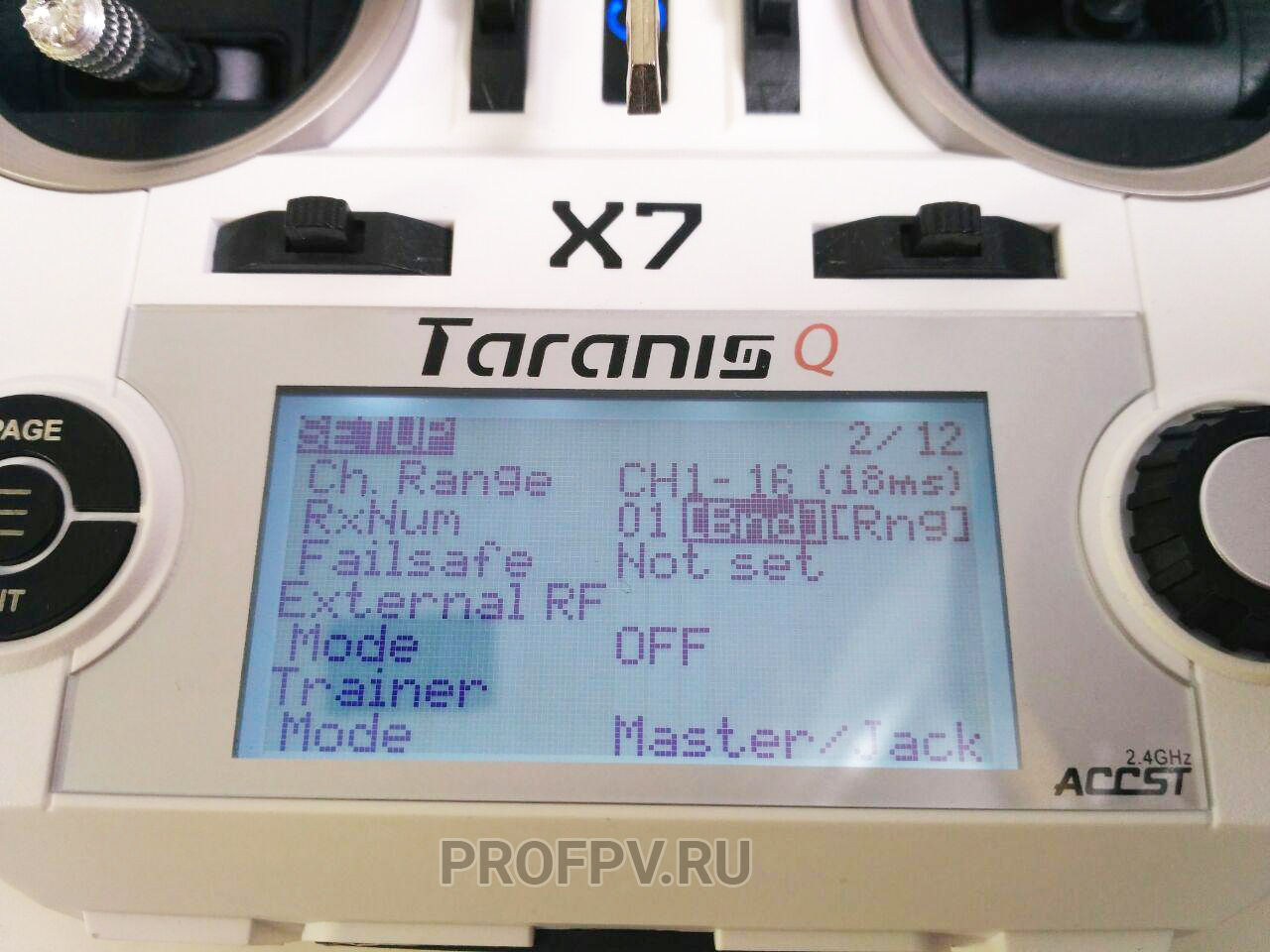
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:
Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:
Получится вот такое:
Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Моторы и пропеллеры
На многих профессиональных дронах я видел моторы и пропеллеры компании
. Видимо, не спроста. В документации Ardupilot они также
как силовая установка для профессиональных дронов. Поэтому, поищем подходящие моторы у них.
Чтобы дрон летал долго, нужны моторы с максимальным КПД. Эффективность связки мотора и пропеллера измеряется количеством тяги в граммах на 1 Ватт затраченной электроэнергии. Чтобы узнать какой мотор самый подходящий, нужно знать общий вес полностью собранного дрона с учетом рамы, аккумулятора и самих моторов с винтами.
Слишком много неизвестных, поэтому воспользуюсь онлайн калькулятором для квадрокоптеров E-calc.
Поигравшись в калькулятор, я выбрал моторы Antigravity 4004 KV300 (53 г) с винтами 15х5 (27 г). В оптимальном режиме при напряжении питания 24 Вольта такой комплект тянет 474 грамма при токе 1,4 А. Эффективность получается 14.
11 г/Ватт, отношение тяги к собственному весу = 5.9:1. На полном ходу тяга составляет 1311 грамм при токе 7,5 А. Коптер будет с четырьмя моторами, то есть квадро. Оптимальный взлетный вес = (474 г * 4 мотора) = 1896 г, максимальный (с учетом тяговооруженности 2:1) = (1311 г * 4 мотора) / 2 = 2622 г.
Моторы управляются регуляторами оборотов. Напряжение питания моторов = 24 Вольта, максимальный рабочий ток = 7,5 А, поэтому нужен регулятор под такое напряжение и с рабочим током, с учетом запаса, минимум 10А. У T-Motor самый легкий регулятор (7 г без проводов) под такое напряжение — это FPV 35A-32bit 3-6S.
Подитог:
ВМГ (винто-моторная группа), состоящая из моторов, пропеллеров и регуляторов (по 4 шт каждого) весит 346 г.
Вместе с электроникой и полезной нагрузкой (346 505) получается 851 г. С учетом крепежа, проводов и разъемов (прикинем 100 г) = 951 г.
При оптимальном весе, на раму и аккумулятор остается (1896 — 951) = 945 г. При максимальном (2622 — 951) = 1671 г.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке.
Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.

он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя.
Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.

И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент. Чем больше kV при той же мощности, тем больше оборотов и ниже момент.
Info
Более прочный материал — дюраль (Д16Т). Практически не гнется, достаточно пружинистый, и его применяют в авиации. Профили из него в ОБИ не продаются, но можно поймать на Митинском рынке на третьем этаже, на рынке ТВЦ «Строй» тоже были.
Подключение моторов квадрокоптера: установка двигателей
Второй этап пошаговой сборки квадрокоптера. Раньше было популярно производить двигатели с правой и левой резьбой, чтобы в процессе полета гайки всегда самозатягивались, но в последнее время все чаще производители продают двигатели с резьбой на валу только в одну сторону.
Поэтому, просто покупайте сразу по 4 штуки двигателей без привязки к стороне, в которую они должны крутиться, это мы потом поправим при настройке прошивки.
Чтобы все смотрелось красиво, можно использовать оплетку жгутов или шнуров, например, вот так:
А можно использовать просто термоусадку. Будет менее красивее, но защита такая же.
В комплекте с двигателями будут идти 2 размера винтов, для толстой рамы и для тонкой рамы. Так как у этой рамы лучи толщиной 5 мм, то используйте самые длинные винты. До оплетки двигателя они не достанут.
Теперь вам потребуется фиксатор резьбы. Продается в любом магазине автозапчастей. Использовать желательно синий, но если остался красный, то просто лейте его в очень малых количествах на резьбовые соединения. Выглядит он так:
Смажьте винты и прикрутите двигатели к раме. Будьте аккуратны и не сорвите резьбу.
После того, как прикрутите двигатели, отмерьте длину проводов, которую нужно будет оставить для припаивания. Отмерять нужно на напрямую, а с учетом изгибов. Вот так:
Провода припаиваются также, как идут от двигателя — по порядку, хотя и можно нарушить порядок и поменять крайние провода местами, тогда двигатель начнет крутиться в другую сторону. А вот средний провод перепутать нельзя, он должен быть обязательно по центру и припаян к средней площадке.
После того, как отмерите, отрежьте лишнее, удалите изоляцию с концов, залудите. Отмерьте и отрежьте кусок термоусадки, либо оплетки и наденьте на провода:
Теперь все это дело нужно припаять. Прогревать надо хорошо, чтобы получился качественный контакт, иначе у вас могут возникнуть проблемы в виде того, что при запуске двигатели будут отключаться (как один из вариантов):
Затем проходим по термоусадке зажигалкой или феном для пайки, чтобы она стянулась.
Полет
И вот что в итоге получилось. Вес без аккумулятора составил 352 грамм. Аккумуляторы я использовал — Giant Power Dinogy 1300mAh 14.8V 4S 65C. Для «неспешных» полетов самое-то в соотношении цена/качество. Для облета квадрика установил двух лопастные пропеллеры — Kingkong 5045, чтобы не сильно нагружать моторы и регулятор.
На представленном ниже DVR, можно оценить качество видеопередатчика. Передающая антенна – клевер. Антенны на приемнике – клевер и пагода. Но OSD выведены параметры: общий ток; напряжение аккумулятора; мощность; температура платы ПК; положение стика газа.
Я был приятно удивлен практически полному отсутствию помех от регулятора при резкой работе стиком газа. Несколько слов про температуру полетного контроллера. При работе видеопередатчика плата очень сильно нагревается, до 70. В полете она обдувается потоком воздуха от пропеллеров и ее температура выше 35 не поднималась. Запись DVR велась на очки Skyzone SKY02S V .
Квадрик полетел. Не плохо на стоковых настройках. Не судите строго FPV пилот из меня пока так себе, тренируюсь. Ниже приведу видео полета с камеры – xiaomi yi. Летать пришлось в сильный порывистый ветер до 12 м/c, квадрик немного сносило, но в целом результатом я доволен.
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://quad-copter.ru/img-stati/aurorarc_c2_flytower_omvt.jpg) AuroraRC C2 Flytower OMVT
AuroraRC C2 Flytower OMVT![]() Купить: ,
Купить: , ![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://quad-copter.ru/img-stati/realacc_xs220_220mm_carbon.jpg) Realacc XS220 220mm Carbon
Realacc XS220 220mm Carbon![]() Купить: ,
Купить: , ![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://quad-copter.ru/img-stati/dys_se2205_pro_2300kv.jpg) DYS SE2205 PRO 2300KV
DYS SE2205 PRO 2300KV![]() Купить: ,
Купить: , ![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://quad-copter.ru/img-stati/foxeer_hs1177_v2_600tvl.jpg) Foxeer HS1177 V2 600TVL
Foxeer HS1177 V2 600TVL![]() Купить: ,
Купить: , ![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://quad-copter.ru/img-stati/frsky_xm _micro_d16.jpg) Frsky XM Micro D16
Frsky XM Micro D16![]() Купить: ,
Купить: , ![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://quad-copter.ru/img-stati/kingkong_ldarc_universal_motor_cover.jpg) KINGKONG/LDARC Universal Motor Cover
KINGKONG/LDARC Universal Motor Cover![]() Купить: ,
Купить: ,
Полетный контроллер
Сразу хочу предупредить, так как на полетный контроллер интегрирован видеопередатчик, подключать его следует только с установленным пигтейлом и подключенной к разъему SMA антенне. В противном случае возможен выход передатчика из строя. Данный ПК (ПК — полетный контроллер) по сути, один из многочисленных клонов OMNIBUS4SD, на который установили видеопередатчик.
На полетном контроллере применена вполне стандартная для таких изделий связка. Процессор STM32F4 и сенсор MPU-6000.
На плате присутствуют контактные площадки для подключения пищалки и габаритной светодиодной подсветки.
Рядом с антенным разъемом расположены две кнопки управления видеопередатчиком. Кнопка FR переключает частотную сетку и канал, кнопка POW – мощность.
Для индикации установленной частотной сетки, канала и мощности видеопередатчика применены SMD светодиоды, расположенные в трех группах, POW, CH, FR.
Короткое нажатие кнопки FR переключает каналы, длительное нажатие (2 секунды) переключает частотную сетку. Однократное нажатие на кнопку POW регулирует мощность –25mW, 100mW, 200mW, 400mW, 600mW.
Для подключения к ПК и настройкам в программе betaflight на полетном контроллере установлен порт – micro usb.
Контроллер оборудован слотом для карточек памяти формата micro sd. При активации логов в прошивке betaflight, становиться доступным запись полетных параметров на карту памяти. Но обычно данной опцией никто не пользуется.
ESC – порт для подключения полетного контроллера к регулятору. САМ – порт для подключения курсовой камеры.
PPS/S – для подключения приемников по шине SBUS. DSM/T – порт для приемников spectrum.
Контактные площадки портов периферии. Эти порты могут управлять дополнительным оборудованием на коптере, например, камерой – Runcam Split.
В качестве чипа OSD на данном полетном контроллере применена микросхема AT7456E. Ссылка на даташит.
Распиновка полетного контроллера:
Качество пайки и изготовления контроллера на приемлемом уровне, хотя в некоторых местах я наблюдал остатки неотмытого флюса.
Пролог
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью
в виде обобщения моего личного опыта и опыта других людей
, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон.
1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.
Сразу отчет о том, что у меня получилось:
На видео заметно, что во время полета у дрона пропали ножки, но об этом позже
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрик и летать?О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации.
В: Нужно ли паять?О: Да, нужно!
В: Собрать квадрик самому дешевле, чем купить в магазине?О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Прошивка регуляторов оборотов в blhelisuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
Нажимаем Flash BLHeli:
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
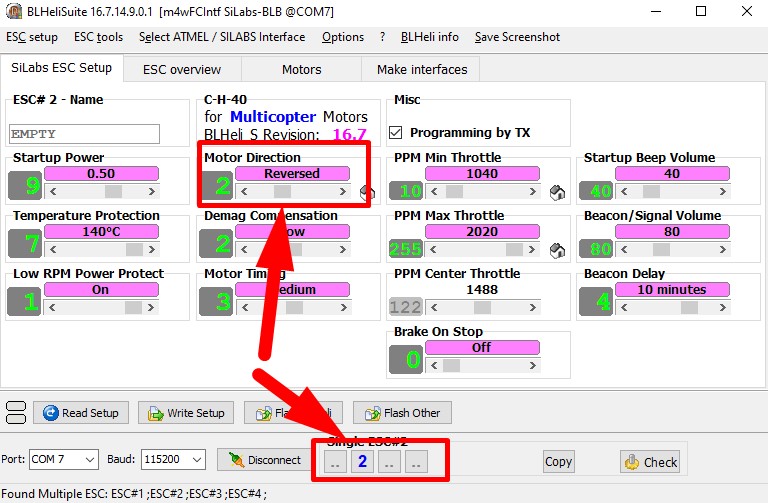
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Сборка рамы
В качестве базы была выбрана классическая рама 115 мм под названием Martian. Стандартный тип — Гибридный X:
Фиолетовые стойки придают стильности и цвета сборке.
Собирается легко, в наборе идет напильник, которым можно при желании обработать углы деталей, они могут быть острыми. Сначала собирается нижняя плашка с нижними лучами.
Стойки пока не устанавливайте, так как они в дальнейшей сборке будут мешать паять провода. Я поторопился и прикрутил их, после чего снова открутил.
Здесь вам понадобится шестигранник, а также головка для гаек, чтобы затянуть нижнюю часть.
Затем, установите пластиковые стойки для установки башни из регулятора оборотов, полетного контроллера и так далее. С обратной стороны они затягиваются винтами
Для того, чтобы регуляторам оборотов было мягче «сидеть» на стойках, наденьте на них силиконовые демпферные колечки. Они идут в комплекте с рамы:
Затем, вам нужно взять регулятор оборотов, и залудить контакты, к которым будет припаивать провода двигателей. Если впервые паяете, то для начала смажьте паяльным флюсом площадки, затем возьмите припой и тут двумя способами: либо приложите проволоку припоя к контакту и расплавьте паяльником, либо расплавьте припой на жало паяльника и после этого приложите каплю к контакту. После этого установите регулятор(ы) оборотов на стойки:
Список к покупке:
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно.
Все, что вы получите в комплекте. На картинке
не
показаны соединительные провода от контроллера к передатчику
1) Набор деталей с Aliexpress ~4000 руб.1.1 Рама1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А1.3 Регуляторы Emax Simon K Series на 12A1.4 Распределительная плата и провода питания1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL.
Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах).1.6 Соединительные провода от контроллера к передатчику1.7 4 пропеллера (2 левых, 2 правых)1.
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://habrastorage.org/files/90f/d09/741/90fd0974125a4afca133d342e595b9b6.jpg)
Приемник и передатчик Turnigy 9X
2) Пульт радиоуправления Turnigy 9X 9Ch приемник (все в одном коплекте) ~3400 руб.
В: Почему именно эта модель?О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.
В: Можно ли взять модель подешевле?О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб.
Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://habrastorage.org/files/9b8/4b3/884/9b84b3884799478b85b5276ab37c431e.jpg)
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://habrastorage.org/files/a6f/fbb/bc6/a6ffbbbc62304a39925644d4f7025d31.jpg)
Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера
4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.
В: Зачем два? Тебе одного мало?О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь.
Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://habrastorage.org/files/f45/338/8b7/f453388b783646ba9b9eb123cc3af43f.jpg)
Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается
5) Аккумулятор для пульта радиоуправления. ~1199 руб.В: Я же уже купил два. Нужен еще один?О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда.
В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема.
В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается.
6) Зарядное устройство для аккумуляторов iMAX B6~1230 руб.
iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.
В: Как этим пользоваться? Какие режимы выбрать?О: Ответы здесь
7) Переходник с XT-60 на T-коннектор ~140 руб.
Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет.
8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб.
Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться.
9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 50 руб.
Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://habrastorage.org/files/99f/2c4/3c2/99f2c43c239b4d47872a9a29d3abd1ec.jpg)
4 винта на 16 мм вместо 8 мм
10) Мелочовка ~ 300 руб.10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати).
Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности10.3 Термоусадка. Пригодится, когда будете прятать регуляторы10.4 Пластиковые хомуты 10 см (9 шт.)
Для фиксации регуляторов10.5 Двухсторонний скотч, изолента10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторов
![Нюансы сборки на раме Strizh LR. Собираем Дальнолет 2.0 [Long Range Миникоптер] передатчик](https://habrastorage.org/files/cf1/bb2/61a/cf1bb261a13d46eda88eca59c59871c6.jpg)
Защита для пропеллеров, напечатанная на 3D принтере
10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель.
Всю мелочовку покупал тут1 и тут2.
10) Паяльник само-собой.
Общая стоимость ~11878 — 13217 руб.
Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз.
Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.


