

- Assign a resource to soft serial
- Bandwidth
- Configure soft serial port
- Edit history
- Failsafe
- Pid-настройки
- Read current configuration
- Release resource
- Save assignment and reboot
- Sbus connection to naze32
- Signal inversion
- Smartport telemetry via softserial (betaflight)
- Software serial, what´s that?
- Use frsky smartport telemetry
- What is a resource?
- Вкладка blackbox
- Командная строка (cli)
- Конфигурация
- Моторы
- Питание и батарея
- Порты
- Режимы
- Рекомендации: проверка безопасности
Assign a resource to soft serial
In the next step we allocate a free serial port to the free resource. In that case we use Soft Serial 1.
To do this, we first scroll up to „#resources“ again.Important !, the changes must be saved with „save“, so that they are taken over.
The two softserial resources are named as follows:
Soft Serial 1: SERIAL_TX 11 and SERIAL_RX 11Soft Serial 2: SERIAL_TX 12 and SERIAL_RX 12
We now assign a resource to the TX pin first.For this we use the just released LED_STRIP 1 Resource A01.
resource SERIAL_TX 11 A01
We confirm this command with the Enter key.
As confirmation, we receive the following message: „Resource is set to A01“
Bandwidth
Based on the UART port being emulated, the CPU load increases.An OSD with a high baud rate of mostly 115200 is therefore not recommended, as the speed is not sufficient and the latency would be too high.
Configure soft serial port
Below I explain how to create a soft serial port. Please note that you need at least Betaflight 3.1 for this.
Edit history
- Dec 2023 – Article created – for F1 Naze32 Rev5 board
- Apr 2023 – Updated instructions for F3 FC
- Jul 2023 – Updated links to setup Smart Port for F4 without built-in inverter
Failsafe
Режим сохранения, то есть, то, что будет делать квадрокоптер, если он потеряет связь с пультом управления.
Здесь есть 2 режима:
- Падение;
- Приземление;
- GPS спасение.
- Падение — если выбрать этот режим, то через секунду (настраивается в поле «Failsafe при низком значении газа, где стоит цифра 100) после потери сигнала, дрон отключит все двигатели и упадет.
- Приземление — при потере сигнала будет плавно приземляться, двигатели будут работать. Режим достаточно опасный, к тому же, нужно хорошо настроить обороты двигателей.
- GPS спасение — если вы установили на свой квадрокоптер GPS-модуль, то с его помощью можно настроить возврат квадрокоптера.
Если кратко, функция экстренная и созданная с целью вернуть управления квадрокоптером, а не его посадить, потому что нет дополнительных датчиков. Функция сработает, если вы улетите на расстояние не менее 50 метров (если не ошибаемся, то минимум можно установить 30 метров от точки взлета). Сажать дрон с помощью данного модуля не советуем, так как он ударит дрон о землю (нет других датчиков).
Вся задача модуля — в случае потери связи или, если вы засомневались в своих силах управления на дальнем расстоянии, активируете функцию GPS Rescue (либо она автоматически активируется), дрон поднимется на определенную высоту и полетит в ПРИМЕРНУЮ точку взлета. Главное, чтобы вы смогли перехватить управления на себя и не потерять/разбить дрон.
Обычно включают режим «Падение», так как с «Приземлением» непонятно где он будет приземляться с работающими винтами, а вдруг там будут люди?
Но если выбрали «Приземление», нужно настроить скорость вращения моторов, которые позволят плавно ему спускаться.
Блок «Failsafe переключатель» выполнит действие при активации тумблера, который присваивается функции на вкладке «Режимы». ПРи активации тумблера, выполнится сценарий Этапа 2.
Pid-настройки
Сложный раздел, в котором настройки производят далеко не все пилоты, за исключением очень увлеченных и профессионалов.
Углубляться в этой статье нет смысла, так как у нас есть несколько отдельных статей по этому разделу:
Read current configuration
Next, we need to find out the current configuration / occupancy. To do this we will go to the CLI and send the command „dump all“ with the Enter key.
Release resource
It may be necessary to release a resource first so that we can use it. In the following example we use the LED pin for this.We now look for the passage „#resources“ in the dump.We notice the assigned value of resource „resource LED_Strip 1„.
In our case „A01„. (It is best to note this value in a text file)
Now we have to release the resource. We do that by replacing the value with „none„.The command is:
resource LED_Strip 1 none
Confirm with the Enter key.
As feedback, we now get a confirmation („Resource is freed„) that this resource is released.
Save assignment and reboot
Now it is important that we do not forget to save the new configuration.For this we send the command „save“ with the Enter key.In order for the new soft serial port to be displayed, the flight controller automatically performs a reboot.
Sbus connection to naze32
Assuming you are using UART2 on the Naze32, and keeping UART1 for your USB connection to Cleanflight configurator, you will need to enable UART2 for Serial RX first in PortTab
And choose Serial RX in Configuration Tab.
UART2 pins are RC3 (TX) and RC4 (RX). You only need to connect the SBUS output to RC4, since this is a one direction communication. RC4 is just below the negative power pin.
You can make your cable like this.
Signal inversion
The big advantage of Softserial is the possibility to invert the signal by software. This is a huge relief since it was previously necessary to pick up the signal from the inverter of the receiver.
Smartport telemetry via softserial (betaflight)
Smart port telemetry requires an inverted serial signal, but many flight controllers only include hardware inversion on the SBUS connector. So if you want to use SmartPort telemetry on your Frsky receiver it can sometimes be a pain. The easiest way to overcome this is to simply use soft serial which emulates the inverter via software. This guide will show you how to do this on just about any flight controller.
In this guide we will be using the omnibus F4 V6 as the flight controller, but this article can be applied to just about any flight controller. We have a Frsky XSR-M receiver connected to it. And we have connected the smartport telemetry to a spare TX pad on UART1. A diagram of this is shown below. Lets get started.

- Assuming you are connecting it as per the diagram above, we will need to enable softserial on TX1 (since we have connected it to UART1). The first thing we need to do is to find what pin the TX1 is connected to so we can enable softserial on that pin.
- The first thing to do is to enable the softserial feature on the configuration tab

- Now we need to tell the flight controller what pins we want to use for softserial
- In the CLI and type
resourceto get a list of pins, look for TX1

- In this example, TX1 is assigned to A09. This is the case for most flight controllers, but sometimes it can be different.
- Now we will enable softserial 1 on pin A09. In the CLI type the following command:
resource SERIAL_TX 11 A09
save💡 Port 11 is for softserial 1, and port 12 is for softserial 2. So if you wanted to assign softserial 2 to another pin (such as UART6, or the LED pin), you could assign port 12 to the corresponding pin you got from theresourcecommand. If you wanted to assign A09 to softserial 2, you would use the commandresource SERIAL_TX 12 A09
- Now when you go back to the ports tab in BetaFlight (after your FC reboots), you will now see a new line called SOFTSERIAL 1

- Simply enable SmartPort telemetry on this port and you should now have Frsky telemetry working on your receiver.
- If you cant get it working, you may need to try using the CLI again to turn inversion on and off using the following commands.
set tlm_halfduplex = on
set tlm_inverted = off
save- If off does not work, try again with
tlm_inverted = on.
Thanks for reading and I hope this helps. If you have any questions be sure to ask on our friendly forums, dronetrest.com
Software serial, what´s that?
Software Serial provides the ability to deploy additional software emulated UART ports, in addition to hardware UART ports, through software.These can, with the exception of a small bandwidth limitation, perform the same tasks as hardware UARTs.Software Serial is therefore ideal for SmartAudio and SmartPort telemetry.
Use frsky smartport telemetry
Softserial is great for using FrSKY SmartPort telemetry.
What is a resource?
Computer programs are written in a specific programming language, while resources are usually simple text files or tables.The advantage is that they can be read, extended or changed by people without programming skills.
In our area the „resource“ of a flight controller is an assignment, which is determined by software (in our case by CLI).This assignment determines what data will be routed to the hardware pin / pad.
Вкладка blackbox
Черный ящик нужно для того, чтобы записывать все данные полета — телеметрию. По мере того, как вы будете набираться опыта, журнал черного ящика будет вашим лучшим другом по настройке своего дрона. Blackbox по умолчанию включен. Данные будут писаться либо во встроенную флеш-память, либо на внешнюю SD-карту.
У всех современных полетных контроллеров есть своя память и это как минимум 16 мегабайт. Этого вполне хватит, чтобы записывать логи полета.
Командная строка (cli)
Через командную строку можно влиять на какую-либо информацию в прошивке, вносить изменения, а также выводить информацию о каком-либо параметре или компоненте. Список команд большой и выводится по команде «help». Все рассказывать здесь не будем, так как у нас опять есть отдельная статья по командной строке, если вам интересно, то ссылка ниже.
Конфигурация
На этой вкладке выполняются базовые настройки, такие как протокол связи полетного протокола с регуляторами оборотов, протокол связи приемника с полетным протоколом, расположение платы и многое другое.
Моторы
На этой вкладке проверяется работоспособность двигателей:
Перед любыми действиями, обязательно снимайте пропеллеры с двигателей!
Перед тем, как покрутить двигатели ползунками, переключите флажок «я понимаю всю опасность», чтобы активировать функционал. Теперь можете подвигать ползунки, моторы начнут крутиться: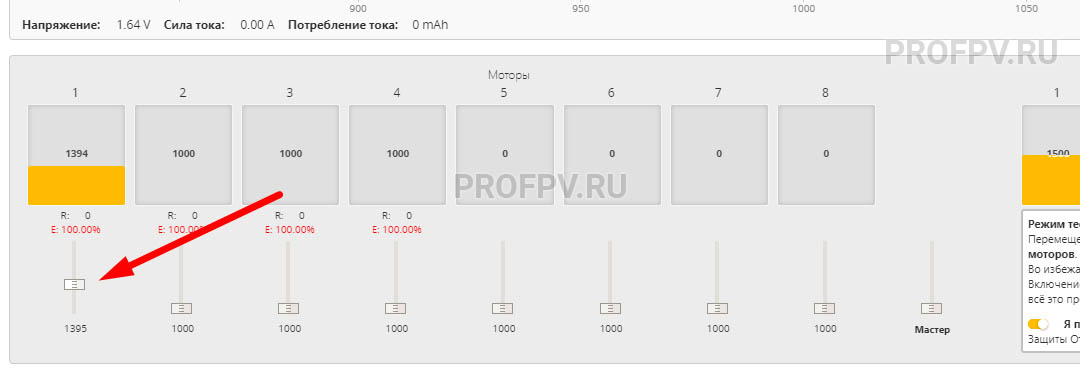 Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Питание и батарея
В этом разделе настраивается датчик тока, а также параметры аккумулятора. Все это нужно для того, чтобы квадрокоптер по OSD передавал актуальные и правильные данные об аккумуляторе, напряжении и токе во время полета.
У нас есть отдельная статья по этому блоку, рекомендуем к прочтению: Как откалибровать датчик тока и датчик напряжения в Betaflight
Порты
На этой вкладке находятся настройки для UART-портов, то есть, для последовательных портов, которые используются для обмена данными с различными компонентами, такими как приемник, видеопередатчик, GPS-модуль и так далее. USB VCP всегда включен, это тот порт, в который вы вставляете провод, microUSB.
В этом разделе обязательно нужно включить порт, который используется для обмена информацией с приемником. У различных полетных контроллеров он может быть разным, у нас Mamba F405 и у него порт для приемника — UART1. Поэтому включен ползунок на Serial Rx. Вам нужно посмотреть документацию к своему полетному контролеру, чтобы точно знать, какой порт включать для приемника.
Режимы
Этот раздел сделан для настройки разных тумблеров и крутилок на пульте управления.
Мы будем настраивать 2 стика:
- Арминг — поставнока и снятие с охраны квадрокоптера;
- Включение режима стабилизации и АКРО режим (ручной режим управления).
Чтобы назначить тумблеру действие, делаем следующее:
- Наводим мышь на ARM и жмем «Добавить диапазон»;
- Выбираем канал AUX1, например, либо можете оставить «АВТО» и щелкнуть любым удобным тумблером, автоматически будет выбран канал, который привязан к этому тумблеру (каждому тумблеру в пульте нужно привязать свой канал, как это делать, смотрите в видео (на английском, но все понятно):
После того, как выбрали AUX, пощелкайте тумблером. На ваши действия, по полоске будет «бегать» желтая точка, она соответствует положению тумблера. Если переместить желтые полоски на область , где будет находиться желтая точка, то квадрокоптер начнет реагировать на это положением, в нашем случае это арминг или снятие с охраны. - Нажмите «Сохранить».
Теперь, когда вы переведете этот тумблер, моторы дрона начнут вращаться с маленькой скоростью, дрон будет снят с охраны. Это называется «Заармить».
Так как на странице Конфигурация был включен ползунок на AIRMODE, квадрокоптер сейчас находится в ручном режиме без стабилизации, то есть, в режиме АКРО.
Режим ANGLE это режим стабилизации. Его назначаем на другой тумблер. Обычно эти 2 режима назначают на один тумблер у которого 3 позиции, то есть, на вторую позицию настраивают ARM и АКРО, а на 3 позицию ANGLE режим, чтобы они не накладывались друг на друга и в случае чего, вы просто переведете в верхнее положение тумблер, чтобы включилась стабилизация.
Рекомендации: проверка безопасности
Перед установкой пропеллеров, рекомендую выполнить ряд проверок, чтобы избежать проблем перед полетом.
Проверить направление двигателей
Перейдите во вкладку «Моторы» и включите режим тестирования по кнопке «Я понимаю всю опасность»:
Теперь запустите моторы (надеюсь вы сняли пропеллеры?) и проверьте, в правильную ли сторону крутятся двигатели в соответствии с этой схемой:
Проверить загрузку процессора
Пока квадрокоптер подключен к Betaflight, посмотрите на нижний сайд-бар:
Если загрузка будет 95% и выше, то у вас будут проблемы во время полета, так как процессор перегружен и не будет успевать вовремя обрабатывать данные. Чтобы решить эту проблему, отключите некоторые функции или отключите разгон, если у вас контроллер F4. Но на современных полетных контроллерах такая проблема — большая редкость.
Проверить гироскоп
Перейдите во вкладку Система и и проверьте настройки гироскопа:
Возьмите квадрокоптер в руки и наклоняйте его во все стороны, ваши действия точь-в-точь должна повторять 3D модель на экране. Стрелка указывает на нос дрона. Если это не так, вернитесь в начало статьи, «Конфигурация», блок 2.Кроме этого, после настроек и тем более прошивки, нужно калибровать акселерометр.
Сделайте бекап настроек
