

- Введение
- Аксессуары
- Аппаратное прерывание
- Видео
- Доработка 3. диммирование
- Доработка №1. уменьшаем пульсации на выходе.
- Доработка №2. настройка выходного тока драйвера
- Камера
- Комплектация
- Комплектация:
- Мостовые драйверы
- Моторы
- Особенности
- Питание
- Планы на будущее контроллера
- Полезные ссылки
- Применение
- Проверка драйвера на кз
- Прототип на ардуино
- Прототип на базе микросхемы mc33035
- Спецификация
- Сюрпризы схем китайских блоков питания эконом класса.
- Тест-драйв
- Транзисторы и н-мост
- Управление
- Устройство двигателя
- Характеристики
- Характеристики драйвера
- Цикл работы
- Подведем итоги
- Выводы
- Вывод
Введение
WLToys – известный в мире китайский бренд от серьезного китайского конкурента в сфере устройств на радиоуправлении — Shantou Chenghai Weili Toys Industrial Co. Имеет большой опыт в разработке с последующим производством устройств на радиоуправлении (Квадрокоптеры/Вертолеты/Самолеты/Автомобили/Катера).
Качество продукции WLToys выше всех похвал. Квадрокоптер WLToys V303 Seeker яркое тому подтверждение, на его примере разработчики показали, что качественный и современный продукт не обязательно должен быть дорогим и малодоступным широкому кругу потребителей.
WLToys V303 Seeker — оптимальные соотношение цены и качества, является одной из топовых моделей WLToys.
Аксессуары
- 2-осевой бесколлекторный подвес
- 1080Р камера Mobius
- HD камера (Giro Camera Phantom Vision f/3.2 FOV 135º)
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
//Пины ключей Н-мостов
const int TAH = 8; //T — транзистор, А — фаза (синяя), Н — верхний ключ полумоста
const int TAL = 9; //T — транзистор, А — фаза (синяя), L — нижний ключ полумоста
const int TBH = 10; //T — транзистор, B — фаза (зелёная), H — верхний ключ полумоста
const int TBL = 11; //T — транзистор, B — фаза (зелёная), L — нижний ключ полумоста
const int TCH = 12; //T — транзистор, C — фаза (жёлтая), H — верхний ключ полумоста
const int TCL = 13; //T — транзистор, C — фаза (жёлтая), L — нижний ключ полумоста
//------------------------------------------------------------------------------------------------
//датчики холла
int HallA = 3; //пин 1 (с прерыванием)
int HallB = 1; //пин 2 (с прерыванием)
int HallC = 0; //пин 3 (с прерыванием)
//------------------------------------------------------------------------------------------------
volatile boolean vala;
volatile boolean valb;
volatile boolean valc;
//------------------------------------------------------------------------------------------------
void setup() {
//Установка пинов ключей на выход
pinMode(TAH, OUTPUT);
pinMode(TAL, OUTPUT);
pinMode(TBH, OUTPUT);
pinMode(TBL, OUTPUT);
pinMode(TCH, OUTPUT);
pinMode(TCL, OUTPUT);
//Считывание датчиков Холла
vala = digitalRead(HallA);
valb = digitalRead(HallB);
valc = digitalRead(HallC);
//Аппаратное прерывание на пинах датчиков Холла
attachInterrupt (digitalPinToInterrupt(HallA), changeA, CHANGE);
attachInterrupt (digitalPinToInterrupt(HallB), changeB, CHANGE);
attachInterrupt (digitalPinToInterrupt(HallC), changeC, CHANGE);
//LOW вызывает прерывание, когда на порту LOW
//CHANGE прерывание вызывается при смене значения на порту с LOW на HIGH, и наоборот
//RISING прерывание вызывается только при смене значения на порту с LOW на HIGH
//FALLING прерывание вызывается только при смене значения на порту с HIGH на LOW
}
void Fases() {
digitalWrite(TAH, (vala && !valb) ? HIGH : LOW);
digitalWrite(TAL, (valb && !vala) ? HIGH : LOW);
digitalWrite(TBH, (valb && !valc) ? HIGH : LOW);
digitalWrite(TBL, (valc && !valb) ? HIGH : LOW);
digitalWrite(TCH, (valc && !vala) ? HIGH : LOW);
digitalWrite(TCL, (vala && !valc) ? HIGH : LOW);
void changeA() {
vala = digitalRead(HallA);
Fases();
}
void changeB() {
valb = digitalRead(HallB);
Fases();
}
void changeC() {
valc = digitalRead(HallC);
Fases();
}
void loop() {
}Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Видео
Видео с квадрокоптером WLToys V303 Seeker.
Доработка 3. диммирование
На плате драйвера имеется три контакта с надписью DIMM, что наводит на мысль, что данный драйвер может управлять мощностью светодиодов. О том же говорит и даташит на микросхему, хотя типовых схем диммирования в них не приведено. Из даташита можно почерпнуть информацию, что подавая на ногу 7 микросхемы напряжение -0.3 — 6В, можно получить плавное регулирование мощности.
Подключение к контактам DIMM переменного резистора ни к чему не приводит, кроме того, нога 7 микросхемы драйвера вообще ни к чему не подключена. Значит снова доработки.
Подпаиваем резистор на 100К к ноге 7 микросхемы
Теперь подавая между землей и резистором напряжение 0-5В получаем ток 60-600мА

Чтобы уменьшить минимальный ток диммирования, необходимо уменьшить и резистор. К сожалению, в даташите про это ничего не написано, поэтому подбирать все компоненты придется опытны путем. Меня лично устроило диммирования от 60 до 600мА.Если нужно организовать диммирование без внешнего питания, то можно взять напряжение питания драйвера ~15В (нога 2 микросхемы или резистор R7) и подать по следующей схеме.
Чтобы уменьшить минимальный ток диммирования, необходимо уменьшить и резистор. К сожалению, в даташите про это ничего не написано, поэтому подбирать все компоненты придется опытны путем. Меня лично устроило диммирования от 60 до 600мА.Если нужно организовать диммирование без внешнего питания, то можно взять напряжение питания драйвера ~15В (нога 2 микросхемы или резистор R7) и подать по следующей схеме.
Ну и, напоследок, подаю ШИМ с D3 ардуино на диммирующий вход.
Пишу простейший скетч, меняющий уровень ШИМ от 0 до максимуму и обратно:
#include <arduino.h>
void setup() {
pinMode(3, OUTPUT);
Serial.begin(9600);
analogWrite(3,0);
}
void loop() {
for( int i=0; i< 255; i =10 ){
analogWrite(3,i);
delay(500);
}
for( int i=255; i>=0; i-=10 ){
analogWrite(3,i);
delay(500);
}
}
Получаю диммирование при помощи ШИМ.
Диммирование при помощи ШИМ увеличивает выходные пульсации примерно на 10-20% по сравнению с управлением постоянным током. Максимально пульсации увеличиваются примерно вдвое при установке тока драйвера в половину от максимального.
Доработка №1. уменьшаем пульсации на выходе.
Как уменьшить пульсации выходного напряжения? Правильно, конденсаторами.Конденсаторы можно поставить в двух местах — увеличить выходную емкость и добавить конденсатор на входе после мостика параллельно пленочному конденсатору на 0.22мкФ.
Для тестирования применяю стрелочный прибор в режиме измерения переменного напряжения и самодельный люксметр, измеряющий пульсации светового потока
Характеристики без конденсаторов ~0.9В и 8.7% (пульсации светового потока)
Конденсатор на выходе ожидаемо уменьшат пульсации вдвое ~0.4В и 4%
А вот 10мкФ конденсатор на входе уменьшает пульсации в 9 раз ~0.1В и 1%, правда добавление этого конденсатора значительно снижает PF (коэффициент мощности)
Оба конденсатора приближают характеристики выходных пульсаций к паспортным ~ 0.05В и 0.6%
Итак пульсации побеждены при помощи двух конденсаторов из старого блока питания.
Доработка №2. настройка выходного тока драйвера
Основное предназначение драйверов — поддерживать стабильный ток на светодиодах. Данный драйвер стабильно выдает 600мА.
Иногда ток драйвера хочется изменить. Обычно это делается подбором резистора или конденсатора в цепи обратной связи. Как обстоят дела у этих драйверов? И зачем здесь установлены три параллельных резистора малого сопротивления R4, R5, R6?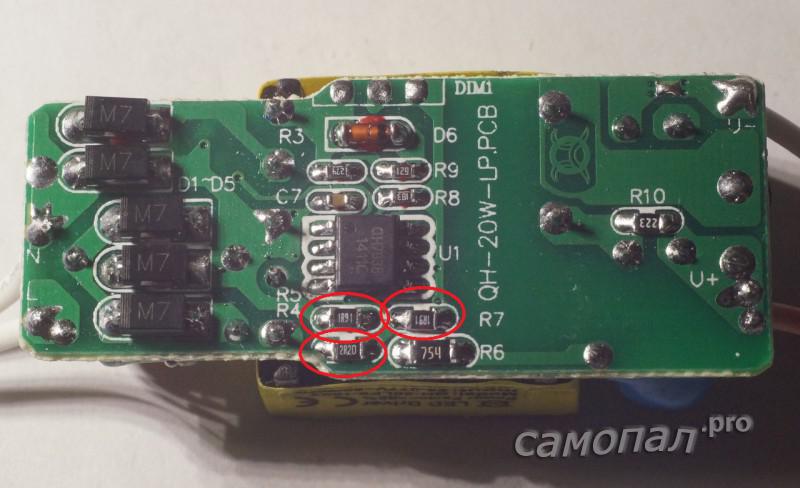
Все правильно. Ими можно задавать выходной ток. Видимо, все драйверы одинаковой мощности, но на разные токи и отличаются именно этими резисторами и выходным трансформатором, дающим разное напряжение.
Если аккуратно демонтировать резистор на 1.9Ом, получаем выходной ток 430мА, демонтировав оба резистора 300мА.
Можно пойти и обратным путем, подпаяв параллельно еще один резистор, но данный драйвер выдает напряжение до 35В и при большем токе мы получим превышение по мощности, что может привести с выходу драйвера из строя. Но 700мА вполне можно выжать.
Итак, при помощи подбора резисторов R4, R5 и R6 можно уменьшать выходной ток драйвера (или очень незначительно увеличивать) не меняя количество светодиодов в цепочке.
Камера
По желанию покупателя WLToys V303 Seeker может оснащаться двумя вариантами камер: 1080Р камера Mobius (при помощи жёстко закрепленного подвеса на демпферах) и HD Giro Camera Phantom Vision (гиростабилизированный подвес камеры имеет регулировку положения по высоте, посредством кнопок на трансмиттере).
Так же дрон может быть дооснащен 2-осевым бесколлекторным подвесом адаптированным под камеры формата GoPro, который в свою очередь может значительно улучшить качество снимаемого материала и продлить получение положительных эмоций от владения беспилотником.
Комплектация
Производитель предлагает четыре варианта комплектации:
- Дрон с безосевым подвесом адаптированным по камеры GoPro.
- Дрон с 2-осевым бесколлекторным подвесом адаптированным под камеры GoPro.
- Дрон с Wi-Fi HD камерой (WLToys V-1080X HD Giro Camera Phantom Vision) на безосевом подвесе.
- Дрон с камерой 1080Р на безосевом подвесе.
В комплект с безосевым подвесом войдут:
- Квадрокоптер WLToys V303 Seeker
- Аккумулятор 3S 11.1В 2700мАч 25C LiPo с разъёмом XT60
- ЗУ с балансом (заряжает 2S — 4S)
- Блок питания 220В для ЗУ
- 2.4ГГц трансмиттер (питание от 4 × АА 1.5В докупаются отдельно)
- 4 × несущих винта
- Подвес адаптированный по камеры формата GoPro
- USB кабель для подключения дрона к ПК
- Инструкция
Комплектация:
Квадрокоптер, пульт управления, аккумулятор, подвес для GoPro на демпферах, зарядное устройство, ключи для гаек лопастей и для гаек ножек, инструкция на английском.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился.
В это же время я наткнулся на два варианта мостовых драйверов:
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
Печатная плата
И готовый результат
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Моторы
Квадрокоптер WLToys V303 Seeker оснащается бесколлекторными моторами 2212 950KV. Потенциал силовой установки обеспечивает отличительную динамику даже в ветреную погоду.
Особенности
- Бесколлекторные моторы
- GPS модуль, компас и барометр
- Режим возврата домой (RTH)
- Функция удержания позиции
- Режим Headless
- Подвес дрона адаптирован под камеры GoPro
- Макс. время полёта 15 мин
- Макс. расстояние удаления 500м
- Готов к полёту из коробки
Питание
Квадрокоптер WLToys V303 Seeker укомплектовывается 3-баночным (3S/11.1В) литий-полимерным АКБ ёмкостью 2700мАч 25С. Согласно спецификации обеспечивает макс. время полёта — 15 минут. Время зарядки от стокового ЗУ около 1 часа.
Планы на будущее контроллера
Продолжая работу над контроллером, планирую сделать следующее:
Полезные ссылки
Из цикла — коты это жидкость. Тимофей — литров 5-6 )))
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
Проверка драйвера на кз
Токовый драйвер должен корректно реагировать на короткое замыкание. Но лучше китайцев проверить. Не люблю я такие штуки. Под напряжением что-то втыкать. Но искусство требует жертв. Закорачиваем выход драйвера во время работы:
Драйвер нормально переносит короткие замыкания и восстанавливает свою работу. Защита от КЗ есть.
Прототип на ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
//Пины ключей Н-мостов
const int TRAplus = 8;
const int TRAminus = 9;
const int TRBplus = 10;
const int TRBminus = 11;
const int TRCplus = 12;
const int TRCminus = 13;
//датчики холла
const int HallA = 3;
const int HallB = 1;
const int HallC = 0;
boolean vala;
boolean valb;
boolean valc;
boolean pvala;
boolean pvalb;
boolean pvalc;
int pHall;
int turns;
void setup() {
//Установка пинов ключей на выход
pinMode(TRAplus, OUTPUT);
pinMode(TRAminus, OUTPUT);
pinMode(TRBplus, OUTPUT);
pinMode(TRBminus, OUTPUT);
pinMode(TRCplus, OUTPUT);
pinMode(TRCminus, OUTPUT);
//Вывод данных через серийный порт
Serial.begin(9600);
}
void loop() {
//Считываем датчики Холла и записываем их значение в val
vala = digitalRead(HallA);
valb = digitalRead(HallB);
valc = digitalRead(HallC);
//Счётчик оборотов колеса. Необходима доработка
if(vala && !pvala) {
if(pHall == HallC) // или HallB в обратную сторону
turns ;
pHall = HallA;
}
if(valb && !pvalb) {
if(pHall == HallA) // или HallC в обратную сторону
turns ;
pHall = HallB;
}
if(valc && !pvalc) {
if(pHall == HallB) // или HallA в обратную сторону
turns ;
pHall = HallC;
}
digitalWrite(TRAplus, (vala && !valb) ? HIGH : LOW); //если vala==HIGH и valb==LOW, тогда записать HIGH, иначе LOW
digitalWrite(TRAminus, (valb && !vala) ? HIGH : LOW);
digitalWrite(TRBplus, (valb && !valc) ? HIGH : LOW);
digitalWrite(TRBminus, (valc && !valb) ? HIGH : LOW);
digitalWrite(TRCplus, (valc && !vala) ? HIGH : LOW);
digitalWrite(TRCminus, (vala && !valc) ? HIGH : LOW);
pvala = vala;
pvalb = valb;
pvalc = valc;
Serial.print(vala);
Serial.print(valb);
Serial.println(valc);
//Serial.println(turns/3);
}Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт.
Прототип на базе микросхемы mc33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
Данная микросхема:
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов.
Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
Печатная плата
Готовый вариант
Спецификация
Бренд:
WLToys
Модель:
V303 Seeker
Цвет:
Белый
Позиционирование:
GPS
Стабилизация:
6-осевой гироскоп
Камера:
1080Р камера/ HD Giro Camera Phantom Vision f/3.2 FOV 135º
Накопитель:
SD карта
Частота радиосигнала:
2.4 ГГц
Количество каналов:
Питание трансмиттера:
4 × АА 1.5В
Моторы:
Бесколлекторные 2212 950KV
Ёмкость батареи:
3S 11.1В 2700мАч 25C LiPo с разъемом XT60
Подсветка:
LED
Макс. время полёта:
15 мин
https://www.youtube.com/watch?v=yrHz8e2-BGI
Макс. расстояние удаления:
500м
Среда для полётов:
Вне помещений
Время зарядки:
≈ 60 мин
Материал:
ABS пластик
Размеры:
305 × 305 × 185мм
Ограничение по возрасту:
14
Сюрпризы схем китайских блоков питания эконом класса.

Обслуживая очередной объект с щитами управления бассейном. На достаточно не бедном объекте, с удивлением обнаружил, что используемый блок питания оперативных цепей построен не на закрытом модульном БП а открытом БП в корпусе. Отчего сборщику того щита пришлось его колхозить стяжками на перекрест к дин рейке. Это какой-то китайский NoName HSM-15-12, который благополучно сдох и обесточил цепи управления. Кстати, из цепей управления питал он только одно промежуточное реле 1Вт мощности, потому причина его гибели при такой низкой нагрузки для меня неясна.
Заменять на подобный нет желания, потому предложил поставить там, проверенный временем модульный MeanWell HDR-15-12 на 15Вт/12В, с таким БП проблем быть не должно.
При том, что этот блок питания дешёвый внешне он выполнен аккуратно, штамповка и сборка сделана на высоком технологическом уровне. На алюминиевых деталях, заусенцев нет, присутсвуют различные пазы, для фиксации платы, и перфорированной крышки. При сборки ничего не перекошено, и не играет в руках, внешне алюминий матовый, врннутри полированн.
В целом в руках держать приятно.

Не в последнюю очередь, по этой причине я, решил по-быстрому его отремонтировать, тем более список поломок таких БП банален:
— Электролиты, как первичных так и вторичных цепей питания.
— Силовой ключ первичной цепи ШИМ, либо просто интегрированный ШИМ с обвязкой.
— В редких случаях первичка трансформатора.
— Оптрон ОС, и/или микросхема TL431.
Когда открыл этот БП, то выяснялось, что он построен, на автогенераторной схеме без микросхем ШИМ.
Электролиты первичной и вторичной цепи вздуты, предохранитель цел, входной диодный мост и ключ первичной цепи целы, при подключении ни каких признаков жизни не демонстрирует.
Имея определенный опыт ремонта таких изделий обольщаться простой ремонта не стал. Заменил вздутые конденсаторы проверил силовой ключ первичной цепи, мост и предохранитель — целы. Включил через балласт, чтобы избежать взрывов, если что. БП признаков жизни так и не поддал. Решил проверить оптопару, для этого надо выпаять. Но тут выяснилась первая «тупость» а точнее говоря сознательная подлость конструкции – оптопара находится под силовым трансформатором… стало быть надо выпаять и его!
Вот как это выглядело после ремонтных работ о чем будет ниже: 
Ну что-ж, «надо, значить надо», аккуратно выпаиваю трансформатор и оптрон.
Подключаю его выводы 1-2 к лабороторнику, задав ограничение по напряжению в 1.2В а току в 20мА. На выводах оптрона 3-4 мерим сопротивление, и получаем – 1.2кОм (обычно порядка 40-65 Ом) значит сдохла и оптопара.
Тут я допустил оплошность, будучи уверенным в том, что все позади, запаял трансформатор на место и включил БП на прямую. Слава Богу, ничего не произошло, но БП так и не подал признаков жизни.
Пришлось делать того чего, не хотелось в рамках данного проекта — срисовывать схему по образцу платы. Так как, входные цепи были уже проверены решил сэкономить время и вычерчивать только ту часть схемы где много всякой обвязки и не очевидно, как она устроена. Где-то потихоньку начал высокую сторону реставрировать…

Но походу работы решил сделать ход конем. Подключить к выходу БП, параллельно лабораторник, и начать подымать напряжение до номинала, чтобы проверить вторичную цепь. Только начал наращивать напряжение, как лабороторник уперся в ограничение тока 1А.
Проверяю диод вторичной цепи – пробит!
Заменяю безимяный китайский 3IDQ 100E, на аналогичный по корпусу SR560.
Снова поддаю и увеличиваю напряжения.
Все хорошо, загорелся светодиод, в защиту уже не уходим, но замечаю, что при 12В потребляемый ток аж 130мА! Для 15Вт БП, это слишком лихо для холостого хода. Нащупываю плату, в первую очередь баластные резисторы, но они холодны. Тем временем где-то выделяются 1.5Вт тепла. Вдруг неожиданно обжигаю палец об поверхность платы, под… трансформатором, там где, стоит перепаянный оптрон… и парочка резисторов. Но, не оптрон горяч, а резистор возле него. Отключил все.
Выпаял трансформатор для расследования причин.
Начинаю срисовывать всю вторичку, чтобы понять, что там за резисторы стоят ну и в целом как она устроена.

Проверяю микросхему TL431А – пробит по всем направлениям. Это конечно плохо, но еще не причина потерь мощности аж в целые 1.5Вт.
И тут барабанная дробь… номинал сопротивления в цепи оптрона R11 – 100Ом, это при 12вольтах номинала напряжения! И спрятан этот резистор вместе с оптроном прямо под силовой трансформатор!
Мое мнение, что это какое-то сознательное вредительство.
И действительно, если принять падение напряжение на открытом оптроне в 1.2В, и микросхеме TL431A в 2.5В, то мы имеем ток I=(Uin-DUopt-DU431)/R11=(12-1.2-2.5)/100= 0.083А = 83mA (при сгоревшем TL431 этот ток будет выше — 108mA). При максимально допустимом токе оптрона в 50mA, очевидно что проживет, он не долго. Сколько прожил этот БП на том объекте, не знаю. Судя по чистому корпусу его поставили не давно. Поэтому перепаял сгоревший TL431A и заменил R11 со 100 на 680Ом.
Снова запаял трансформатор на место,
включил блок питания в сеть и он заработал. 
Нагрузил его лентой – полет нормальный. Все!
Вот такие, вот дела. Китайцы, не просто «экономят» а тупо в цепь ОС закладывают такой резистор из-за которого впоследствии вылетит целый набор компонентов. Чтобы ремонтнику было веселее, проблемные компоненты прячутся под трансформатор!!! 
По просьбе трудящихся добавляю всю принципиальную схему:
Тест-драйв
Квадрокоптер WLToys V303 Seeker в тесте зарекомендовал себя как мощный, стабильный и ветроустойчивый дрон. Работа электроники заслуживает всех похвал. Управление интуитивно понятное, привыкать не пришлось. Возврат домой осуществляет как с кнопки на трансмиттере, так и в автоматическом режиме, с последующей посадкой и отключением моторов (потере связи/ при малом заряде АКБ). В ветреную погоду уверенно привязывается к точке. Работу Headless режима как всегда оценят новички.
Транзисторы и н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением ( или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами.
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Управление
В комплекте с WLToys V303 Seeker идет классический 4-канальный пульт WLToys, работающий на частоте 2.4ГГц. В свободной от помех зоне обеспечивает макс. удаление дрона на расстояние — 500м. Питание осуществляется от четырёх пальчиковых батареек (докупаются отдельно).
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.
Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях.
При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Характеристики
Дистанция полёта:
500 метров
Время полёта:
заявлено – до 15 мин., но фактически с камерой летает не дольше 10мин.
Максимальная скорость набора высоты:
10м/с
Аккумулятор:
2700 мА*час, 11.1 В
Время зарядки:
около 1.5 часов
Тип двигателя:
бесколлекторные
Полетный контроллер:
ZeroUAV YS-S4
Габариты, ДхШхВ:
305х305х185 мм
Вес:https://www.youtube.com/watch?v=sOug1b0E_vw
840 г
Максимальный подъемный вес:
1 кг
GPS:
Характеристики драйвера
На фото видна микросхема драйвера QH7938. Поиск в интернете приводит к даташиту на эту микросхему на китайском языкеДаташит явно не полный, на схеме не хватает номиналов деталей да и на драйвере элементов явно больше. И что делать с загадочными ногами DIM и RTH?
Спасибо пользователю Муськи Sarayan14 который уже ковырял данный драйвер и даже нарисовал схему.
Схему перерисовал и немного доработал
Подключаю цепочку из 9-ти трех-ваттных светодиодов. Все работает, ток стабильный 598мА, но прибор в режиме измерения переменного напряжения показывает пульсации на выходе около 1В или более 3%. Где же заявленные в характеристиках 50мВ?
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
A , A–, B , B–, C , C–
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Подведем итоги
Плюсы драйвера
Минусы
Драйверы вполне годятся для тех, кто дружит с паяльником или для тех кто не дружит, но готов терпеть выходные пульсации 3-4%.
Выводы
В интернете можно часто встретить мнение о том, что v303 ничем не уступает Phantom-ам и даже превосходит их. Я с этим не согласна: если сложить стоимость Wltoys v303, камеры (возьмем GoPro 4, т.к. она наиболее близка по качеству к камерам Phantom-ов)
и 3-осевого подвеса, необходимого для достижения хорошей картинки на видео, то получится практически цена DJI Phantom 3 standard, у которого и дальность больше, и трансляция на смартфон есть, и полезные функции типа Follow me и «Точка интереса». А если докупать еще и wi-fi модуль для v303 для трансляции картинки с камеры, то общая стоимость всей этой техники, пожалуй, будет даже выше Phantom-а.
Соответственно, за эти деньги я бы лучше взяла его и не мучилась.
Но если вам не нужно видео идеального качества, то за свои деньги Wltoys v303 – вариант отличный, качественный и надежный.
И напоследок моё видео, снятое с этого квадрокоптера:
p.s. Спасибо Насте за этот замечательный опыт
Вывод
https://www.youtube.com/watch?v=ULIVoG1i5b4
Квадрокоптер WLToys V303 Seeker полностью оправдывает потраченные средства. Объединяет в себе все самые актуальные функции и режимы в купе с БК моторами. Модель в полной мере оценят любители беспилотного хобби с акцентом на аэросъёмку, которые выросли из коллекторных БЛА и хотят попробовать свои навыки на чём-то более серьёзном, но в тоже время не дорогом. Возрастное ограничение 14 .

