

- Coex клевер 4 pro инструкция сборки
- Coex клевер 4 pro сборка
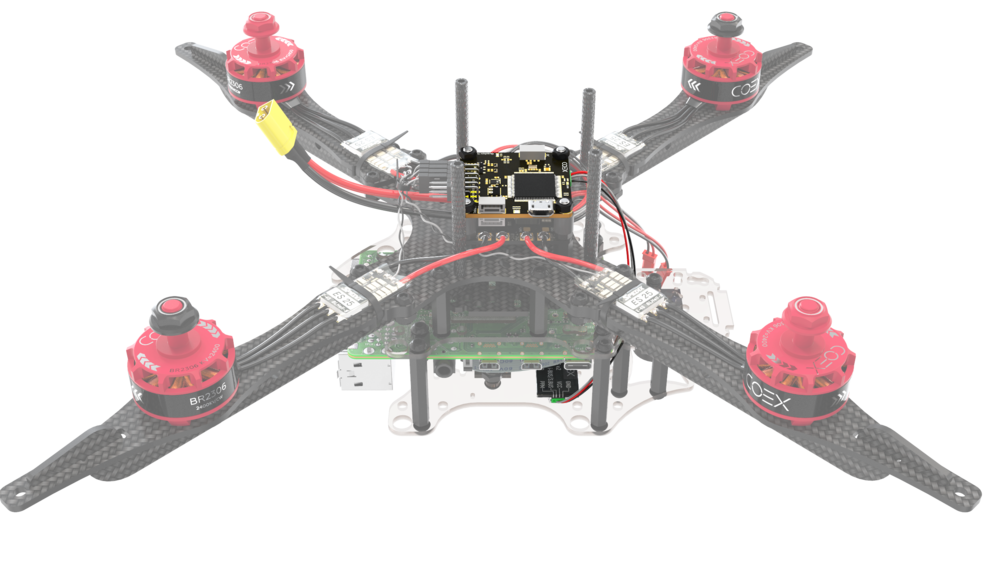
- Coex клевер 4 worldskills russia — конструктор ррограммируемого квадрокоптера для соревнований
- Зачем настраивать пид-регулятор
- Методика настройки цифрового пид-регулятора
- Пример настройки пид-регулятора на микроконтроллере stm32.
- Установка raspberry pi
Coex клевер 4 pro инструкция сборки
Для увеличения прочности рамы вы можете распечатать на 3D принтере или нарезать на лазерном резаке рем-накладки.
В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.
Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
Используя пазы, установите сверху карбоновую центральную деку.
Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Используя бокорезы, укоротите провода на моторах:
- Обрежьте половину длины (оставив 30 мм).
Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
Скрутите медные жилы.
Установите мотор на луч.
Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.
Повторите эти действия для остальных моторов.
Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.
Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными — на передний левый и задний правый.
Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки «мама-мама» 15 мм.
- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту « », а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
Установите 4 стойки «папа-мама» 6 мм на центральную деку винтами М3х6.
Установите PDB на стойки.
Стрелки на PDB и центральной деке должны быть направлены в одну сторону.
- Припаяйте фазные провода моторов к регуляторам.
Припаяйте силовые провода регуляторов к контактным площадкам платы ( красный к « », черный к «-»).
Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов ( красный к « », черный к «-»).
С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
- Левый стик в центральной нижней позиции.
- Правый стик в центре.
Переключатели A, B, C, D в положение «от себя».
Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PWM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
- Выключите пульт с помощью слайдера POWER.
- Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный — к одному из центральных.
- Установите джампер на вход (B/VCC).
- Подключите АКБ.
Светодиод на радиоприемнике должен мигать.
Зажмите кнопку BIND KEY на пульте.
Включите пульт (перещелкните POWER, не отпуская BIND KEY).
Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными — по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать серво-тестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный — к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Направление вращения также можно изменить программно. Процесс описан в статье про прошивку ESC.
Повторите процесс для каждого мотора.
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку «ОК».
- Кнопками Up/Down выбираем меню «System setup», кнопкой «ОК» подтвердите выбор.
- Выберите «RX Setup».
- Выберите «Output mode».
- Убедитесь, что в открывшемся меню выбран пункт «PPM».
- Чтобы сохранить настройки, удерживайте нажатой кнопку «Cancel».
Установите 4 стойки «папа-мама» 6 мм на PDB.
Подключите шлейф питания к PDB.
Установите поликарбонатную пластину на стойки и зафиксируйте нейлоновыми гайками.
Вставьте карту microSD в полётный контроллер.
Установите полетный контроллер на пластину с помощью двухстороннего скотча.
Стрелки на полетном контроллере и центральной деке должны быть направлены в одну сторону.
Подключите шлейф питания PDB к разъему «POWER» полетного контроллера, закрутив его в «косичку» для взаимной фиксации проводов.
Установите 4 алюминиевые стойки 40 мм с помощью винтов М3х10.
Подключите сигнальные провода регуляторов к полетному контроллеру следующим образом:
Установите 2 стойки «мама-мама» 15 мм на центральную деку с помощью винтов М3х8.
Другие 2 стойки были установлены ранее в разделе «Сборка рамы», п. 2.
- Согните поликарбонатную заготовку в обруч и зафиксируйте ее концы в замке.
Установите обруч на раму, используя пазы.
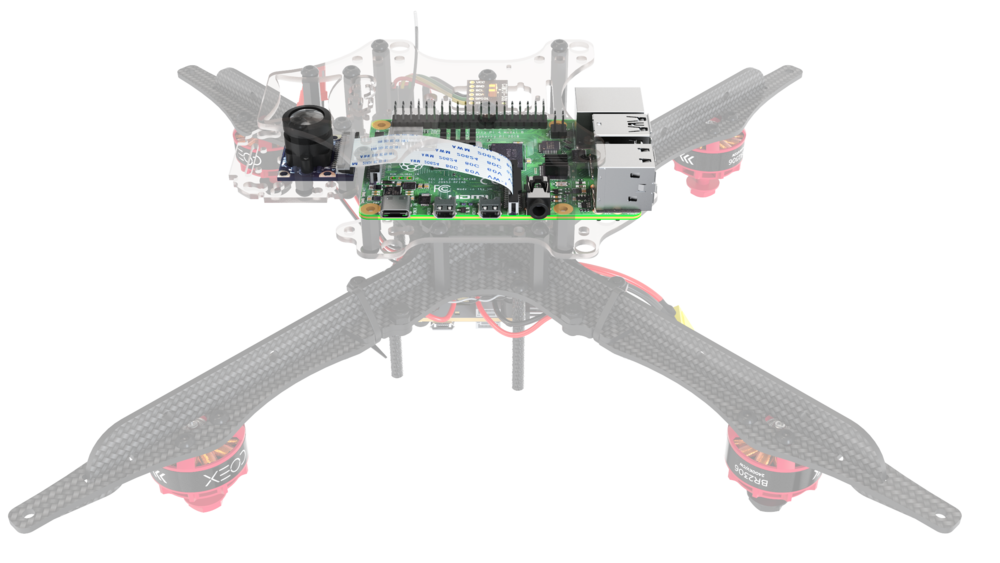
Вставьте карту microSD с записанным образом в Raspberry Pi
Установите плату Raspberry Pi на стойки, используя 4 стойки «папа-мама».
Протяните провода от BEC через паз в центральной раме.
Подключите провод питания от BEC к Raspberry, согласно схеме:
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии — напаять).
Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.
Питание для ленты берется от второго BEC. Подключите контакты «-» и « » к Ground и 5v на ленте соответственно.
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
- Поднимите защелку.
- Подключите шлейф.
- Закройте защелку.
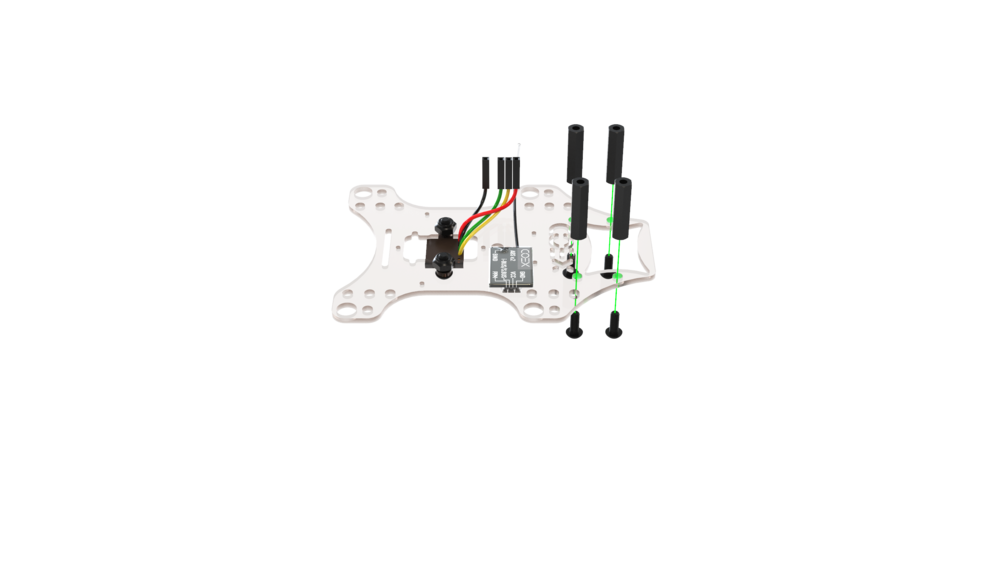
- Подготовьте лазерный дальномер к монтажу, предварительно напаяв на него контакты.
Установите камеру на 4 самореза 2х5.
Убедитесь, что саморезы не касаются деталей на печатной плате камеры. В противном случае камера может не заработать.
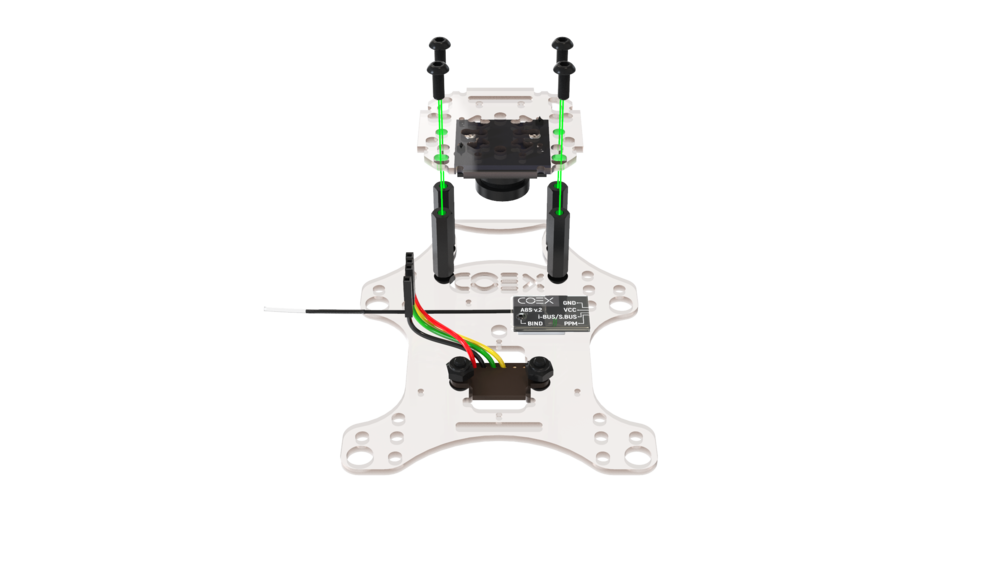
Установить на деку лазерный дальномер с помощью 2 винтов М3х8 и стальных гаек.
Установите приемник на нижнюю деку с помощью двухстороннего скотча.
Установите нижнюю деку с помощью 4 винтов М3х10.
Подключите шлейф к камере.
Подключите лазерный дальномер к Raspberry Pi с помощью проводов типа «мама-мама»:
- Разъем VCC к пину 1 (3.3v).
- Разъем GND к пину 9 (Ground).
- Разъем SDA к пину 3 (GPIO02).
Разъем SCL к пину 5 (GPIO03).
Установите 8 ножек с помощью винтов М3х10 и стальных гаек.
Установите демпфирующие прокладки на ножки с помощью винтов М3х10 и стальных гаек.
Подключите кабель радиоприемника в RCIN разъем полетного контроллера.
Подключите кабель к приемнику, соответственно изображению.
Соберите нижнюю часть защиты, используя 12 винтов М3х10 и 12 нейлоновых стоек 40 мм.
Установите верхнюю часть, используя 12 винтов М3х10.
Установите защиту на коптер, с помощью 4 винтов М3х10 и стальных гаек.
- Установите на верхнюю деку держатель АКБ с помощью 4 винтов М3х8 и стальных гаек.
- Проденьте в пазы ремешок для фиксации АКБ.
Установите верхнюю деку на коптер с помощью 4 винтов М3х10.
Подключите USB кабель к разъему на полетном контроллере и USB разъему Raspberry Pi.
Зафиксируйте «улитку» кабеля в удобном месте с помощью двухстороннего скотча так, чтобы провод не мешал вращению винтов.
Произведите настройку компонентов квадрокоптера, используя раздел «Настройка».
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
Дрон готов к полету!
Документация Клевера доступна по лицензии Creative Commons «Attribution-NonCommercial-ShareAlike» 4.0 Всемирная.
Источник
Coex клевер 4 pro сборка
Слушать
Длительность: 5 мин и 17 сек
Битрейт: 192 Kbps
Клевер 2 Сборка Часть 2 Плата Распределения Питания
Coex Clever Drone With 3D Scanner Solution
Стационарный Беспилотный Комплекс Пеликан Автоматика
Квадрокоптер Своими Руками Часть 1 Сборка И Подключение
Доставка Груза На Клевере 4 На Олимпиаде Нти 2023 Clever 4 On Nti Olympics 2023
Клевер 2 Настройка Часть 1 Qground Control Настройка Пульта
Автономные Indoor Полеты Клевера
Сборка Квадрокоптера Клевер 1 Часть
Детский технопарк Кванториум-33
Шоу Дронов В Китае И Южной Корее
Управление Квадрокоптером Клевер 4 С Помощью Эмоций
Конструктор Программируемого Квадрокоптера И Умк Клевер
Клевер 2 Сборка Часть 3 Батарейный Блок
Коптер Экспресс С Кейсом Рой Дронов На Проектной Смене Большие Вызовы В Сириусе
The Difference Between A Drone Flight Controller And Flight Computer
Coex Clover Autonomous Flights Compilation
Идея Стенда Для Изучения Возможностей Полетного Контроллера Coex Pix
Станислав «Stas Sauer» Колмаков
Компетенция Эксплуатация Беспилотных Авиационных Систем
Клевер 2 Настройка Часть 2 Калибровка Датчиков Настройка Полетных Режимов
Квадрокоптер Для Съёмки Из Сантехники Своими Руками
Клевер 2 Настройка Часть 3 Предполетная Подготовка И Полет
8Ы Ŧ 8Ќ Ĝр Χø Pro
Kyrsquare Сколько Бы Не Было Денег
Korg Style Сборник В Дорогу 2020
Эльза И Иккинг Забери Меня С Собой Hiccelsa
Анвар Ахмедов Модар
Like That Eminem
История 5 Класс Вигасин 3 Параграф
Песня Клип Про Сиреноголовый И Cartoon Cat Morgenshtern Элджей
Зелёный Слоник Он Тебя Целует
Саб Зиро И Скорпион
Serhat Durmus Ya
Музыка На Репит
Justin Bieber Friends Slowed Reverb Rain
Coex Клевер 4 Pro Сборка
Песня Луиза Грустная Луиза Грустная
Конструктор Успешная Ферма
Очень Красивая Песня Владимир Песня Верная
Загадки Века Сталин И Гитлер Тайная Встреча
Lut Gaye Ringtone Aankh Uthi Mohabbat Ne Ringtone Jubin Nautiyal New Songs Emraan Hashmi Mr Love Ak
Eelke Kleijn Netherlands Days Like Nights Radio 188 14 06 2023
Deeper Phil Feat Shirley Heavens Misleading Me
Я Русский Солдат Военный Фильм 1995 Г
Momentos Incomodos Entre Jane Rizzoli Y Maura Isles
Аватария Дешевые Наряды Alina Podluzhnaya
Събуди Се 2023 Джоре Дос С Прана Ана
Mcmcc Hillclimb 2023 Onboard With Jay Williams On A Suzuki Rm125
Золотой Прокат Евгении Медведевой На Чемпионате Мира 2023
Bahtiyor Hataev Popuri Бахтиер Хатаев Попури Official Audio Music
Владимир Песня Ты Новинка 2023 Песни О Любви
Pikachu Meme Tweening Test Gachalife Filler
Источник
Coex клевер 4 worldskills russia — конструктор ррограммируемого квадрокоптера для соревнований
1. Политика конфиденциальности, обработки персональных данных и пользовательское соглашение (далее — Политика) ООО «Коптер Экспресс Технологии» (далее – «Общество») (ОГРН 1167746602320), 121205, Москва, Большой бульвар, д. 42, стр. 1, пом. 137, тер. Сколково инновационного центра (далее — Компания) действует в отношении любой информации, которую Компания может получить от Пользователя во время использования им сайта Компании (www.copter-express.ru ) в связи с исполнением Компанией и Пользователем действий, необходимых для заключения договоров и оплаты, и определяет основные правила использования сайта Компании.
2. Факт использования сайта Компании подтверждает однозначное и безоговорочное согласие Пользователя с настоящей Политикой, в том числе с условиями обработки его персональных данных. При отсутствии согласия Пользователя с настоящей Политикой и условиями обработки его персональных данных Пользователь должен прекратить использование сайта и/или сервиса Компании. Новая редакция настоящей Политики вступает в силу с момента её размещения на сайте copter-express.ru/privacy, если иное не предусмотрено новой редакцией настоящей Политики.
3. Для регистрации при покупке Пользователю может предлагается заполнение форм регистрации. При использовании сайта Компании Пользователь обязуется предоставить достоверную и актуальную информацию по вопросам, указанным в формах регистрации.
4. В соответствии с настоящей Политикой информация, обрабатываемая Компанией, включает в себя: персональные данные Пользователя в объеме, указанном в формах регистрации и иная информация, обработка которой необходима в соответствии с действующим законодательством (Федеральный закон от 27.07.2006 N 152-ФЗ “О персональных данных”)
5. Настоящим Пользователь принимает решение о предоставлении информации, в том числе персональных данных, и дает Компании согласие на обработку информации, в том числе персональных данных свободно.
Перечень информации включает в себя: фамилию, имя, отчество, адрес электронной почты, номера телефонов, паспортные данные (при необходимости), должность, а также любая иная информация, относящаяся к субъекту персональных данных. Пользователь дает согласие на сбор, запись, систематизацию и хранение персональных данных и иной информации.
6. Целями обработки информации, в том числе персональных данных, являются: использование Пользователем сайта Компании; исполнение Компанией и Пользователем договоров, а также совершение действий необходимых для заключения договоров и оплаты; идентификации Пользователя; связь с Пользователем; подготовка и направление ответов на запросы; направления уведомлений о новых сервисах, продуктах, мероприятиях; предоставление актуальной информации.
7. При обработке персональных данных Пользователей Компания руководствуется Федеральным законом № 152-ФЗ «О персональных данных». Компания при обработке персональных данных принимает необходимые правовые, организационные и технические меры для защиты персональных данных от неправомерного или случайного доступа к ним, уничтожения, изменения, распространения или копирования, а также от иных неправомерных действий в отношении персональных данных в соответствии с требованиями законодательства РФ.
8. Пользователь вправе в любое время изменить или удалить предоставленную информацию, воспользовавшись соответствующим сервисом или обратившись Компанию по реквизитам, указанным в настоящей Политике или на сайте.
9. Пользователь самостоятельно несет ответственность за свои действия, связанные с использованием сайта и Компании, в том числе, если такие действия приведут к нарушению прав и законных интересов третьих лиц, а также за соблюдение законодательства РФ. Пользователь обязуется возместить убытки, причиненные Компании и/или третьим лицам в результате неисполнения или ненадлежащего исполнения Пользователем обязательств, предусмотренных настоящей Политикой и/или законодательством РФ.
10. Все объекты, в том числе произведения, доступные при помощи cайта и/или сервисов Компании, включая: элементы дизайна, текст, графические изображения являются объектами исключительных прав Компании и других правообладателей. Использование указанных объектов возможно только в рамках функционала, предлагаемого сервисом. Никакие объекты не могут быть использованы иным образом без предварительного разрешения правообладателя. Под использованием подразумеваются, в том числе: воспроизведение, копирование, переработка, распространение на любой основе и другие способы в соответствии с законодательством РФ.
11. Положения настоящей Политики регулируются в соответствии с законодательством РФ. Если по тем или иным причинам одно или несколько положений настоящий Политики будут признаны недействительными, это не оказывает влияния на остальные положения.
12. По всем вопросам Пользователь может направить обращение в адрес Компании по следующим реквизитам: ООО «Коптер Экспресс Технологии» ИНН 9729014181; КПП 772901001; ОГРН 1167746602320
Юридический адрес 143026, г. Москва, ул. Луговая д. 4, к. 5. Адресс для корреспонденции: 109316, г. Москва, Волгоградский проспект, дом 42, корп 5.
Зачем настраивать пид-регулятор
Наиболее характерным примером использования этих приборов являются термосистемы, связанные с изменениями или поддержанием на определенном уровне различной температуры. За счет тонких настроек удается существенно снизить энергетические потери при охлаждении или нагреве.
Необходимость тонких настроек рекомендуется рассматривать на примере работы обогревателя. Этот нагревательный прибор управляется ПИД-регулятором и должен поддерживать заданные температуры. Уровень температуры измеряется и контролируется термопарой. Конечная цель настроек заключается в подборе наиболее оптимального коэффициента, с помощью которого будет поддерживаться заданный температурный режим.
На представленных графиках видны попытки увеличения температуры с 10 до 25 градусов. В этом случае возможны различные варианты. Общим для них является подключение регулятора к обогревающей установке, в результате, его работа начнет осуществляться в режиме управляемой мощности, а микроклимат в помещении достигнет нужного уровня.
Идеальная конфигурация температурной кривой обозначена красным цветом (рис. 1). То есть, данный физический параметр плавно движется к заданной отметке за максимально короткий промежуток времени. Оптимальный временной промежуток определяется достаточно сложно, поскольку на него оказывают влияние такие факторы как мощность обогревателя, размеры помещения и т.д. Эта величина определяется экспериментальным путем.
Температурный график черного цвета указывает на неправильный выбор коэффициента при регулировании. Работа системы становится неустойчивой, регулятор функционирует неравномерно, а заданное значение не соблюдается.
В более благоприятных условиях температурные графики все так же далеки от стандартных значений (рис. 2). Черная кривая отображает сильные скачки относительно требуемого значения, а зеленая указывает на плавную, но слишком медленную регулировку.
Наиболее приемлемые варианты всех трех кривых обозначены на рисунке 3. Идеальный температурный график, обозначенный красным цветом, возможен только в теории. На практике же выполняется длительный подбор коэффициентов, которые позволяют получить лишь приближенные значения, пригодные для использования.
Выбор необходимых коэффициентов, вычисления и настройка могут производиться с помощью различных методов.
Методика настройки цифрового пид-регулятора
Обычно, при использовании пропорционально-интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю. Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
где:
Xp – полоса пропорциональности
Ei = (SP-PV) = (уставка-тек) = ошибка (рассогласование)
Тд – постоянная времени дифференцирования
∆Ei – разность ошибок соседних измерений (Ei – Ei-1)
∆tизм – время между соседними измерениями (ti – t i-1)
Ти – постоянная времени интегрирования

– Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
Легко заметить, что сигнал управления является суммой трех составляющих: пропорциональной (слагаемое 1), дифференциальной (слагаемое 2), и интегральной (слагаемое 3).
Пропорциональная составляющая зависит от текущей ошибки Ei и компенсирует текущую ошибку пропорционально ее величине.
Дифференциальная составляющая зависит от скорости изменения ошибки ∆Ei / ∆tизм и компенсирует резкие возмущения.
Интегральная составляющая накапливает ошибку регулирования, что позволяет ПИД-регулятору поддерживать нулевую ошибку в установившемся режиме (устраняет статическую ошибку управления).
Обычно ПИД-регулятор имеет дополнительные параметры помимо трех коэффициентов (Xp, Ти, Тд). Рассмотрим их более подробно на примере скриншота меню параметров ПИД-регулятора прибора “
ПАРАГРАФ PL20
”.
Каналов (выходов) ПИД-регулирования в приборе может быть несколько и параметры для каждого из них свои собственные. Поэтому выберите желаемый канал в первой графе.
Источником обратной связи с объекта управления (текущая контролируемая величина) может быть любой измерительный канал прибора, поэтому необходимо выбрать желаемый измерительный канал в графе ВЛАДЕЛЕЦ.
ПИД-регулятор может управлять как по закону прямой логики (управление печью), так и по обратному закону (управление хладоустановкой). Выберите желаемую логику работы.
Уставка (SP) – это желаемая величина, на которую регулятор должен выйти в установившемся режиме.
Xp – зона пропорциональности. Задается в единицах контролируемой величины (для терморегулятора в градусах). Зона пропорциональности называется так, потому что только в ней ((SP – Xp)…(SP Xp)) пропорциональная составляющая ПИД-регулятора может формировать мощность выходного сигнала управления пропорционально ошибке. А за ее пределами мощность будет равна либо 0%, либо 100%. Таким образом, чем уже эта зона, тем быстрее отклик регулятора, но слишком высокое быстродействие может ввести систему в автоколебательный режим.
Ти – постоянная времени интегрирования.
Тд – постоянная времени дифференцирования.
Текущая мощность – это информационный параметр.
Минимальная и максимальная мощность определяют границы мощности выхода ПИД-регулятора.
Аварийная мощность – это такая мощность, которая формируется регулятором при неисправности датчика или измерительного канала. Так можно обеспечить отрицательную температуру холодильной камеры или не дать остыть печи даже при аварийной ситуации.
Последним параметром идет период ШИМ. Этот параметр один для всех ПИД-регуляторов, т.к. каналы ШИМ синхронизированы между собой от одного таймера. ШИМ сигнал позволяет регулировать мощность посредством регулировки скважности сигнала (регулируется ширина импульса при постоянной частоте модуляции). Разрядность ШИМ (число позиций мощности) равна 8192 дискреты (13 бит). Период ШИМ (от 1 мс до 250 сек). Этот параметр зависит от типа и коммутационных способностей силовых исполнительных ключей (м.б. реле, пускатель, твердотельное реле, симистор). Чем выше частота коммутации (чем меньше период) тем больше тепловые потери в ключах (квадратичная зависимость потерь от частоты) и больше износ механических коммутаторов, но лучше качество регулирования. Важно найти золотую середину.
Настройка пропорциональной компоненты (Xp)
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP – это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
Тο – начальная температура в системе;
Тsp – заданная температура (уставка);
∆T – размах колебаний температуры;
∆t – период колебаний температуры.
Установить зону пропорциональности равной размаху колебаний температуры: Xp = ∆T. Это значение служит
первым приближением для зоны пропорциональности.
Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис. 3.
Переходная характеристика типа 1: Значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2: В переходной характеристике наблюдаются затухающие колебания (5 – 6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: В переходной характеристике наблюдаются небольшой выброс (перерегулирование) и быстро затухающие колебания (1 – 2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4: Температура плавно подходит к установившемуся значению без выбросов и колебаний. Этот тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Настройка дифференциальной компоненты (Tд)
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти )
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.
Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины Ти = ∆t.
Переходная характеристика типа 2: Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым.
Переходная характеристика типа 4: Получается при слишком малой величине постоянной времени интегрирования. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3: Оптимальная.
Использованные источники информации
- Сабинин Ю.А. Ковчин С.А. “Теория электропривода”
- Шрейнер Р. Т. “Системы подчиненного регулирования электроприводов”
- Олссон, Пиани “Цифровые системы автоматизации и управления”
- Материалы сайта www.asu-tp.org
ООО «Автоматика» © 2023
Пример настройки пид-регулятора на микроконтроллере stm32.
Итак, проект мы создали в первой части, сейчас же целенаправленно займемся настройкой значений:
float Kp = 0; float Ki = 0; float Kd = 0;
На данный момент все коэффициенты в нуле, то есть регулятор не функционирует. Начинаем последовательно производить настройку описанным экспериментально-аналитическим способом. Прикинем возможные диапазоны значений. Итак, пусть невязка (разница между текущим значением температуры и целевым) равна 1°C.
Выходной сигнал может изменяться от 0 до 1000 (длительность импульсы ШИМ-сигнала для управления охлаждением). Если поставим K_p равным 100, то на это значение невязки получим длительность импульса выходного ШИМ-сигнала равной 100, вполне адекватное значение.
Для анализа поведения системы будем производить следующее:
- Задаем целевое значение 30°C, ждем пока система стабилизируется.
- Задаем целевое значение 40°C, аналогично ожидаем эффекта.
- Строим график зависимости температуры датчика от времени и анализируем полученное.
Приступаем, тест №1:
Видим, что все точно в соответствии с теорией – при использовании только пропорциональной составляющей система не может выйти на требуемые значения из-за статической ошибки. Отлично, добавим интегрирующую составляющую, задав некоторое значение K_i:
На этот раз уже все иначе – целевое значение более-менее установить удается, но имеем неслабый выброс при подходе к значению. Логичным шагом будет увеличение коэффициента усиления дифференцирующей составляющей:
Так, стало получше (амплитуда выброса уменьшилась), увеличиваем K_d еще:
Отлично, выброс практически погасили, но выходить на нужное значение хотелось бы побыстрее. Вывод очевиден – увеличиваем коэффициент усиления пропорциональной составляющей (K_p):
Вот, намного приятнее, посмотрим на последние два варианта друг относительно друга:
Вполне себе ничего результат в итоге. Опять же система очень инертная изначально, датчик производит измерения не слишком быстро, да и шаг дискретизации приличный – 0.125 °C. Так что результат вполне годный. Наблюдаемые промежуточные графики очень хорошо демонстрируют суть протекающих процессов, а это и было нашей целью – получение наглядного примера, дополняющего рассмотренные теоретические аспекты. Так что на этом заканчиваем на сегодня, следите за обновлениями и спасибо за внимание 🤝
Ссылка на проект – MT_PID_Project.
Установка raspberry pi
На монтажную деку установите стойки 20 мм и 40 мм, закрепите их с помощью винтов М3х8.
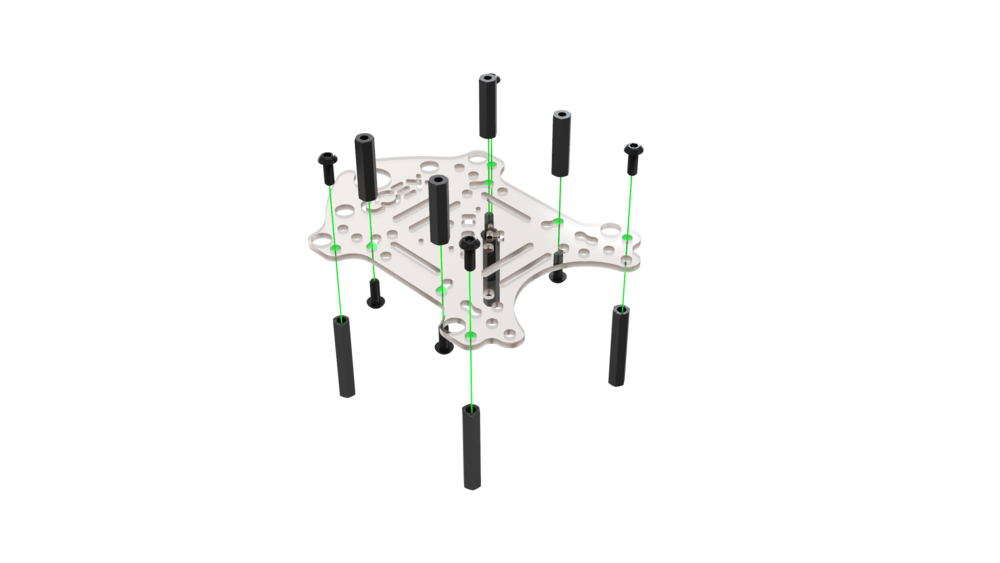
Нарежьте резьбу М3 в крепежных отверстиях Raspberry Pi с помощью болта М3х12.
Вкрутите в плату Raspberry Pi стойки 6мм, при необходимости закрепите их нейлоновыми гайками.
Установите Raspberry Pi на монтажную деку, закрепив ее болтами М3х6.
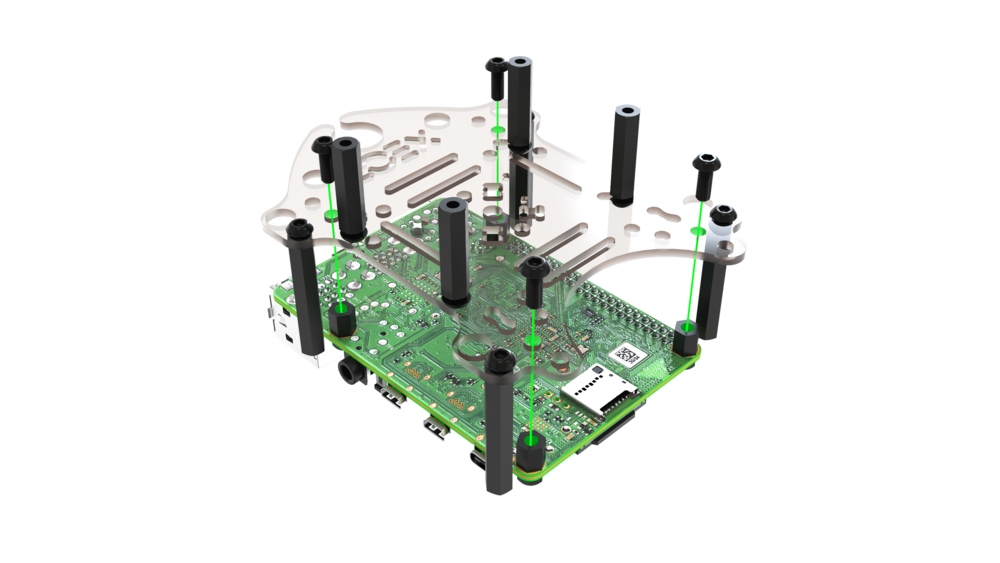
Установите собранный модуль в соответствующие пазы основной деке дрона.
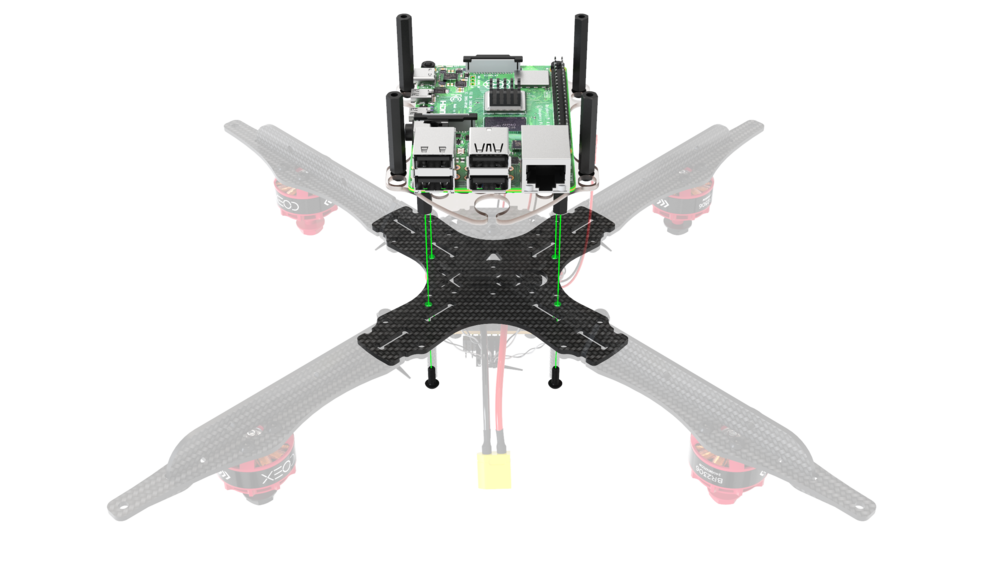
Подключите разъем 5V JST в соответствующие пины питания Raspberry Pi.

Возьмите 4 провода Dupont, обрежьте 5–7 см кабеля и припаяйте к соответствующим пинам дальномера.
| Провод | Пин дальномера |
|——–|—————-|
| Красный | 5v |
| Черный | GND |
| Желтый | SDA |
| Зеленый | SCL |Установите дальномер на деку захвата и Приклейте радиоприемник на 3М скотч.
Устанавливайте дальномер таки образом, чтобы гайки не прислонялись к плате напрямую. При такой установке если большая вероятность повредить элементы платы.
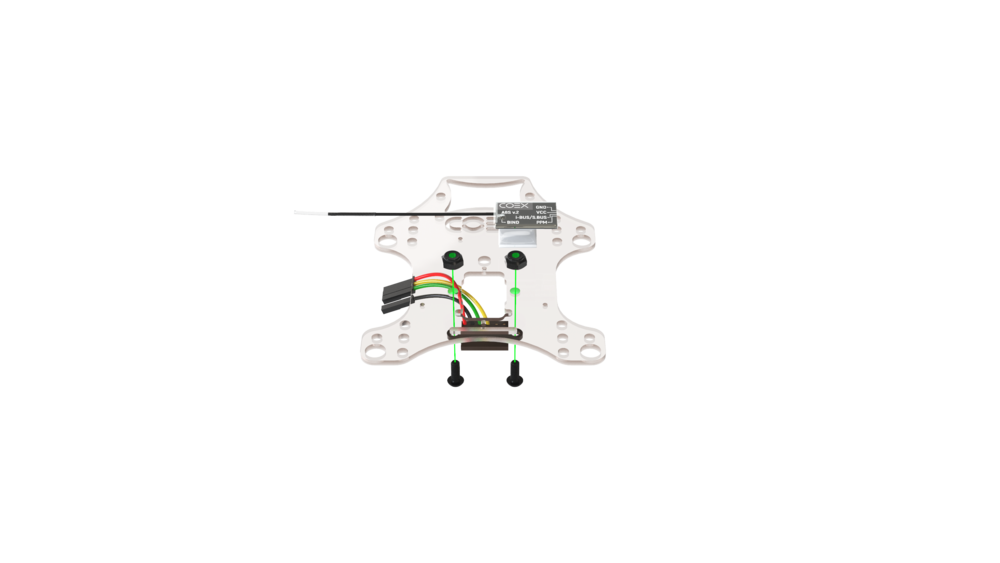
Установите 4 нейлоновые стойки 20мм и зафиксируйте их болтами М3х8.
На малую монтажную деку установите камеру и зафиксируйте ее двумя короткими саморезами.
Если закрепить камеру в верхнем правом углу и шляпка самореза будет касаться элемента на камере, камера не будет работать.
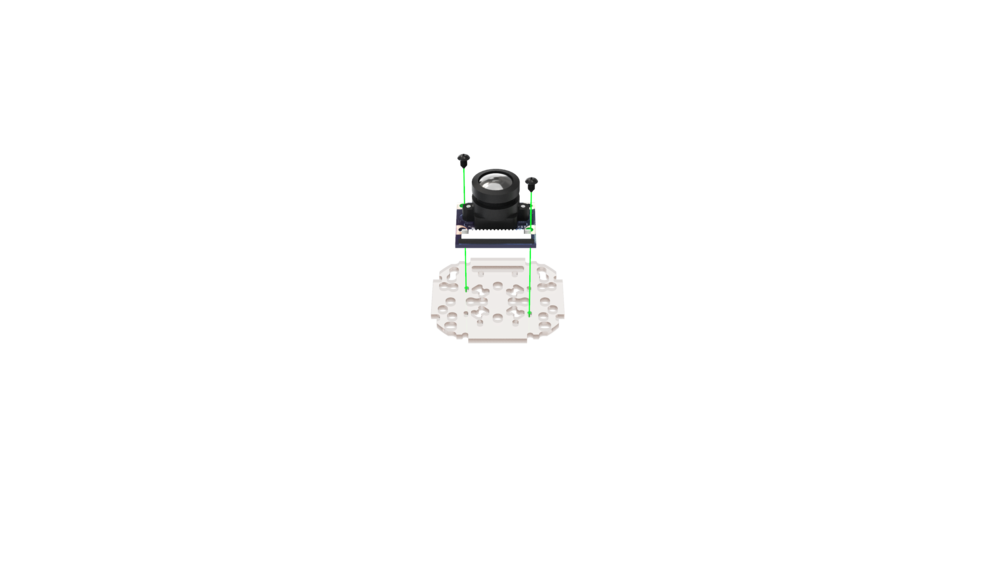
Установите малую монтажную деку с камерой на стойки и зафиксируйте с помощью болтов М3х8.
Собранный модуль установите над модулем Raspberry Pi и зафиксируйте болтами М3х8.

Соедините камеру и Raspberry Pi с помощью шлейфа.
Подсоедините дальномер к Raspberry Pi в соответствующие пины.

Соедините радиоприемник и полетный контроллер с помощью 4-х пинового кабеля.





 купить по привлекательной цене 46990 руб. в Москве")