

Описание систем управления летающих роботов
2. Тихонравов М.К. Полет птиц и машины с машущими крыльями -М.: «Оборонгиз», 1949. – 208с.
3. Р. Александер Биомеханика – М.: «Мир», 1970. – 340 с.
4. http://www.festo.com/
5. http://flappingflight.com
6. http://katera.ru
7. Яцун С.Ф., Черепанов А.А., Рублев С.Б. Исследование движения трехзвенного мобильного робота по горизонтальной шероховатой поверхности // Изв. Юго-Зап. гос. ун-та. Серия Техника и технологии. 2023. – № 2. – Ч. 1. – С. 182-191.
ОПИСАНИЕ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАЮЩИХ РОБОТОВ
Н.И. Попов, начальник адъюнктуры С.В. Ефимов, доцент, к.т.н.
Воронежский институт ГПС МЧС России, г.Воронеж
Анализ литературных источников показывает, что сегодня в основном применяются коптеры, управляемые оператором на основе визуального контроля положения робота в пространстве. Разработка таких устройств имеет ряд особенностей, связанных с тем, что оператор вынужден постоянно следить за положением коптера в пространстве, предвидеть возможность столкновений коптера с препятствиями и своевременно подавать управляющие воздействия на приводы соответствующих винтов. Это требует серьезной подготовки и тренинга оператора. Такой подход обладает такими существенными недостатками, как ограниченная область применения мобильных роботов, вызванная необходимостью поддержки связи с постом оператора; сложность управления на уровне действий, приводящая к быстрому утомлению оператора; сложность выработки адекватного управления на основе телеметрических данных.
Более перспективным является система управления движением с применением автономных устройств навигации и определения препятствий. Режим автономного управления позволяет роботу перемещаться в пространстве в самостоятельном режиме независимо от действий оператора.
Автономный полет состоит из нескольких основных этапов, выполняемых коптером, под действием управляющих воздействий, поступающих со стороны бортовой системы управления. В первую очередь осуществляется взлет с некоторой поверхности. Далее происходит набор высоты в соответствии с выбранным законом изменения вертикальной координаты, далее происходит перемещение коптера в
горизонтальной плоскости в заданную точку пространства. В этой точке обычно реализуется режим зависания, позволяющий производить разведку местности видеосъемку и осуществлять необходимые измерения. После выполнения задания коптер возвращается в исходную или любую определенную в задании точку и осуществляет посадку. Очевидно, что при проектировании бортовой системы автоматического управления автономным полетом, необходимо решить задачи определения реальных координат робота путем обработки данных, поступающих с датчиков, согласования их с заданными в памяти, нахождение управляющих напряжений по отклонениям реальных координат от заданных.
Особый интерес представляет режим стабилизации коптера, характеризующийся способностью коптера зависать в воздухе на заданной высоте и производить мониторинг окружающей среды. Такой режим удобнее осуществлять автономно с помощью бортовой САУ. Установленные в системе управления акселерометр и бародатчик, помогают выполнить эту задачу. В тоже время сегодня даже лучшие образцы коптеров имеют невысокую точность зависания на точке.
Отклонения по высоте достигает /- 0,8 м; а в горизонтальной плоскости /- 2,5 м.
Разработка новых алгоритмов автономного управления позволяет решить поставленную задачу более качественно.
Последние годы все большее распространение получают методы интеллектуального управления мобильными роботами. На сегодняшний день в большинстве случаев реализация такого управления в недетерминированных условиях сопряжено с целым рядом трудностей, к которым, прежде всего, относятся: сложность синтеза объективных и полных знаний, причем как автоматического (в случае отсутствия требуемой обучающей выборки), так и осуществляемого экспертами. Недостаточно развиты способности интеллектуальных систем управления к адаптации в изменяющихся условиях. Самостоятельное функционирование коптера в заранее непредсказуемых условиях возможно при дальнейшем развитии интеллектуальных систем управления. В этом случае управление со стороны оператора может осуществляться на более высоком уровне – на уровне постановки цели. Однако такие методы управления движением роботов в недетерминированной среде развиты слабо.
В этой связи объективно сложилось противоречие между потребностями практики по созданию и применению мобильных робототехнических систем и ограниченными возможностями существующих методов управления движением в недетерминированных условиях.
Это определяет актуальность исследования путей развития интеллектуального подхода к управлению движением мобильных роботов,
его значимость для теории и практики создания и применения мобильных робототехнических систем. В ряде случаев управляемый оператором на уровне постановки цели мобильный робот должен осуществлять движение в недетерминированной среде, характеризующейся заранее неизвестным расположением препятствий и целевых объектов, а также их подвижностью. В таких условиях самостоятельное перемещение робота определяет необходимость динамического анализа ситуации в среде функционирования. На основе результатов такого анализа, осуществляемого на основе, в общем случае, сенсорной информации, и целевой установки оператора система управления роботом должна осуществлять навигацию и управление его движением.
В соответствии с этим выделяют три следующих типа архитектур систем управления движением мультикоптера:
1. архитектура на основе декомпозиции функций обработки информации в процессе «распознавание – моделирование – планирование -действие» (Sensor – Model – Plan – Act, SMPA);
2. реактивная (рефлексная) архитектура, основанная на стратегии целенаправленного поведения мультикоптера, вырабатываемого на базе сенсорной информации (sensor based action);
3. гибридная архитектура на основе комбинирования двух предыдущих типов архитектур [2].
Типовая структурно-функциональная схема SMPA-системы управления движением мультикоптера, представлена на рисунке.
ПостРоение Планирование
Сенсорные системы ««г,ттрг.и
V модели движения
местности
Рис. Типовая структурно-функциональная схема SMPA-системы управления
движением мультикоптера
Такая система осуществляет управление движением робота посредством моделирования окружающей среды, локализации в ней, а также планирования, коррекции и отработки траекторий.
Моделирование окружающей среды осуществляется на базе сенсорной и иной поступающей из различных источников информации. Модель окружающей среды должна описывать в динамике расположение робота, препятствий и целевых объектов.
Выделяют три уровня моделей: верхний (глобальный), средний (локальный, проблемный) и нижний, представляющий текущее сенсорное поле, как правило, в виде клеток-ячеек (cell decomposition model). Используются геометрические и топологические модели. Первые из них описывают характеристики объектов, их позицию, ориентацию, вторые -аспекты положения объекта по отношению к другим объектам. Геометрическую модель формируют подобия объектов, определенных в концепции объектно-ориентированного подхода, например, в программировании. Топологическая модель обычно представляет собой граф, строящийся на основе геометрической модели, либо непосредственно.
Задача самолокализации робота, является тесно связанной с задачей моделирования рабочего пространства, так как их решения взаимно зависимы, то есть качество решения одной определяет качество решения другой. Решаться эта задача может с применением методов счисления пути, интегральной и сенсорной локализации. Метод счисления пути предполагает осуществление анализа накопленной ошибки и в большинстве случаев используется совместно с сенсорным методом для ее устранения, а также приведения в соответствие характеристик или ориентиров в рабочей среде. Метод интегральной навигации предполагает реализацию глобального позиционирования (GPS) и лазерного сканирования среды. Так же существуют методы локализации на базе вероятностных походов и комплексировании данных, поступающих от разных датчиков[1].
По аналогии с моделированием рабочего пространства выделяют геометрическую и топологическую локализацию. Геометрическая локализация определяет положение и ориентацию МР, топологическая -его отношение со средой функционирования (например, «напротив окна»).
На сегодняшний день существует три основных стратегии локализационых вычислений:
1. периодическое совмещение локальной модели среды с заданной априори картой;
2. определение позиции на основании априори известных реперов -ориентиров;
3. выделение характеристик среды и оценка их позиций относительно робота с последующим определением его результирующего перемещения.
Планирование траекторий мультикоптера может осуществляться на основе следующих подходов:
1. методов на основе карты путей, где применяются графы видимости и диаграммы Вороного;
2. представления карты среды в виде клеточного поля, предполагающего реализацию триангуляции Делоне, а также разбиение на квадратные и шестиугольные сегменты, на которых могут быть реализованы модели вероятностного прохождения, модели с накоплением информации и т.п.;
3. движения в виртуальных информационных полях, предполагающего использование эвристических алгоритмов, а также алгоритмов, основанных на методе потенциалов;
4. методов планирования двигательного поведения, где формируемый план представляет собой последовательность поведенческих актов, переход между которыми осуществляется при наступлении определенных условий.
В общем случае выделяют глобальное и локальное планирование. Глобальное планирование осуществляется на основе карты местности (например, с использованием GPS, сенсорных систем дальнего действия), локальное – на основе сигналов от сенсорных систем ближнего действия и датчиков безопасности, поступающих в реальном масштабе времени.
Список использованной литературы
1. Белоконь С.А., Золотухин Ю.Н., Нестеров А.А., Филиппов М.Н. Управление квадрокоптером на основании организации движения по желаемой траектории в пространстве состояний // Труды XIII Международной конференции Проблемы управления и моделирования в сложных системах. Самара: Самарский научный центр РАН, 2023. – С.217-222.
2. Bouadi H. and Tadjine M. “Nonlinear observer design and sliding mode control of four rotors helicopter,” Proceedings of World Academy of Science, Engineering and Technology, 2007.vol. 25, pp. 225-230.
| модели | строим вторую электрическую авиамодель
«Укрощение электричества»
или
Постройка второй электрической авиамодели
Часть вторая
Продолжаем сборку
Система управления установлена. Крепим на передний шпангоут электромотор. В полости между первым и вторым шпангоутом закрепляем регулятор.


Для того, чтобы понять куда нам нужно устанавливать аккумуляторную батарею, собираем все до кучи. Двигая по фюзеляжу батарею, ищем то положение, при котором центр тяжести модели будет находиться по лонжерону крыла. В идеале батарея должна была разместиться перед приемником в центре фюзеляжа. У нас так не получилось. Центровка вышла задняя, посему батарею пришлось переместить вперед. А места там нет! Пришлось вклеить две площадки для крепления аккумулятора. Первую на втором шпангоуте, вторую у лонжерона крыла. По опыту дальнейшей эксплуатации оказалось вполне приличное решение.


Теперь можно заклеить нижнюю часть фюзеляжа пенопластом. Но нужно учесть два момента. Первый – не забываем закрепить провода от рулевых машинок в фюзеляже, второй – прорезаем отверстие для выхода воздуха в средней части фюзеляжа.
Фонарь и капот закрепляем с помощью маленьких саморезов, добытых из старых китайских игрушек. Капот желательно крепить уже после того как самолет облетан и настроен выкос двигателя. Тогда все будет ровно и красиво.


Очень полезно перед окончательным монтажом оборудования покрыть деревянные составляющие паркетным или обыкновенным нитролаком. Это предохранит деревянные детали от влаги. Бывает дождь или снег попадает вовнутрь фюзеляжа при неправильной посадке или других обстоятельствах.
Настраиваем систему управления
Отклонение рулей при одинарных расходах:
Элероны – 15°
Руль высоты – 15°
Руль поворота – 35°
Экспонента отрицательная – 30%
Отклонение рулей при двойных расходах:
Элероны – 35°
Руль высоты – 45°
Руль поворота – максимально допустимый или 45°
Экспонента отрицательная – 60%
Очень полезно проверить и настроить крайние точки хода качалок рулевых машинок, чтобы рулевые поверхности откланялись в обе стороны одинаково на один и тот же градус. Для этого распечатайте и вырежьте шаблон с размеченными углами.

Нужно вырезать середину, согнуть по линии сгиба и склеить половинки. Приложив его к фюзеляжу точно в нейтрале, можно посмотреть кто, куда и насколько отклоняется.
Также можно поиграть настройками закрылков или флаперонов, аппаратура позволяет. Но нам это кажется лишним для данной модели.
Система охлаждения
Не самая последняя по важности задача для электролетов – организация правильного охлаждения двигателя, регулятора и аккумуляторной батареи.
На нашем самолете поток воздуха забирается приливами на капоте и отправляется в передние боковые отверстия фюзеляжа, которые мы вырезали для охлаждения. Получатся, что при обтяжке фюзеляжа, эти два отверстия оставляем открытыми. Далее воздух проходит через окна в шпангоутах, попутно охлаждая регулятор скорости и аккумуляторную батарею. В конце своего пути воздух выходит через заранее предусмотренное отверстие в нижней части фюзеляжа.
Обтяжка скотчем
Для придания неповторимого внешнего вида нашему самолету, а также для защиты потолочки от вредных воздействий, обтягиваем модель цветным скотчем. Хочу отметить, что плюс к эстетическим соображениям, правильно наложенный скотч, придает дополнительную прочность деталям, изготовленным из потолочки. Не нужно этим пренебрегать.

Мы, по давней привычке, облетывали модель ничем не обклеенную. Фюзеляж был насквозь дырявым и низ не зашит пенопластом. А мало ли! Может после первого облета нужно будет что-то переделывать, а у нас уже такая красота наведена.
После обтяжки скотчем, по всем деталям полезно пройтись утюгом. Пленка натянется и приклеится гораздо лучше. Будьте осторожны с утюгом, если вы переборщите с температурой, скотч расплавиться. Также может покоробить рули. Температуру лучше подбирать опытным путем на куске этой же потолочки оклеенной этим же скотчем.
Перед обтяжкой желательно продумать цветовую гамму и внешний вид вашей модели. По ходу действия это будет сделать гораздо сложней. Обтяжка крыла цветным скотчем, имеет сугубо эстетическую составляющую.
Облет
Когда все готово к полету, батареи заряжены, летчики – конструкторы – испытатели не находят себе места. Ну очень интересно, как же поведет себя модель в первом полете, оправдаются ли все те решения которые были реализованы в очередном модельном шедевре?!
Вот тут осторожней, не надо пороть горячку. Проверьте все еще раз. В конце концов, возьмите собранный самолет в руки и энергично встряхните им! Что вы услышали? Если тишина, ничего не стукнуло и не отвалилось – то будем считать все в порядке.
Опять же, погода. Лучше совершать первый полет свежеизготовленного аппарата в штиль или с минимальным движением воздушных масс.
Закон подлости в момент облета как никогда в силе! Неоднократно были случаи, когда при доводке модели, на улице, как назло, был абсолютный штиль, а вот когда все закончено и заряжено, ты на работе (учебе) ждешь вечера или выходного, чтобы рвануть на поле, с погодой что-то случается, появляется ветер, набегают тучи, грозя залить все дождем и разорвать все на своем пути порывами ветра. Не торопитесь. Подготовьте аккумуляторные батареи для хранения (режим Storage в зарядном устройстве) и спрячьте их в надежное место. Учили же вас аккуратно относиться к литий-полимерным аккумуляторам. Нужно помнить, что у нас хоть и продвинутая, но электричка. Вес ее достаточно мал, она не может достойно противостоять стихии.
Мы не смогли дождаться полного штиля и облетывали самолет в небольшой рваный ветерок. Но ничего, все обошлось. Самолет полетел сразу. Пришлось сделать пару щелчков триммером руля высоты и элеронов.

Поразительно верткая модель получилась! Благодаря развитым элеронам, даже на зажатых расходах, самолет очень резок по крену. При включении двойных расходов, самолет становится еще резче, но благодаря этому эффективность рулей остается достаточной на очень малых скоростях.

Первый полет сделан, модель оттриммирована, летучесть проверена. Вроде все правильно, самолет летит, как хотели. Поздравляем себя! Теперь отделка и доводка. Далее летные испытания по настройке самолета на предмет корректировки выкоса мотора, динамической балансировке, дифференциальных отклонений элеронов и т.д.



Данная модель позволяет выполнять практически все фигуры высшего пилотажа, даже элементы модного нынче 3D. Полет в прямом и обратном полете совершенно одинаков, при немного задней центровке модель в обратном полете летит без поддержки рулем высоты! Бочки получаются ровными, петли круглыми. Свою задачу, как вторая электричка, самолет выполняет полностью. Очень удобно, оказалось, возить самолет с собой в багажнике. В любой момент можно подлетнуть.


Пару раз модель падала, но ничего страшного не случилось. В первый раз отстегнулись шасси и минус винт, второй раз похуже, досталось рулю высоты и опять минус винт. Но ничего страшного, тут же вечером все склеивалось. А все почему? Потому, что самолет так расслабляет своими летными данными, что, несмотря на любой ветер, мы все равно заставляли его подниматься в воздух. На любых других своих самолетах, не было бы даже и мысли о возможности полетов в такую погоду.
Послесловие
На данный момент самолет налетал немало моточасов, оправдал все вложенные в него мысли. Нещадно эксплуатировался и зимой и летом, от -10 до 30 по Цельсию. Каких-то новых косяков в конструкции выявлено не было.




Сейчас, чаще всего, самолет обитает в багажнике моего автомобиля. Домой забираются только аккумуляторы для зарядки.


Ну, что ж, в этой категории летающих моделей, с данной мотоустановкой, больше нам делать нечего. С ростом мастерства пилота (моего сына), растут и модели самолетов. На очереди третья электричка, уже посерьезней, с размахом 1100-1200 мм, с двигателем равноценным 46 размеру ДВС регулятором под 60-80 А, с четырех баночными литий-полимерными аккумуляторами.
Чертежи модели
PDF формат – el_evstratova.pdf (1 Мб)
DWF формат – el_evstratova.dwf (466 Кб)
Для просмотра и печати чертежей в формате dwf, советую найти и установить программу SetupDesignReview2009.exe. С ее помощью можно легко открыть большой архив чертежей и смотреть их с отличным
качеством.
Надо сказать, что некоторые детали не совпадают с теми, что видно на реальном самолёте. Например гаргрот – по идее, он должен иметь более элиптический профиль и если есть желание, делайте элиптическим (правда, это повлечёт усложнение подгонки фонаря…). Детали крепления опущены – причина – мы же не поставляем набор-посылку, поэтому, ориентируясь по фотографиям, придумайте сами.
Крышка с фонарём – дан только общий вид – это из соображений, что делать и подгонять её, вам придётся “по месту” – в вашем варианте самолёта.
По всем, возникающим при постройки модели вопросам, обращайтесь в соответствующий раздел нашего форума.
Видео полета второй электрички можно посмотреть здесь.
Евгений Евстратов
Обсудить на форуме
Разработка алгоритмов системы управления самолёта схемы «летающее крыло»
УДК 533.694.54
P.M. Мурзагалип1’2, В. М. Кувшинов2, А. Н. Власов2
1 Московский физико-технический институт (государственный университет) 2Центральный аэрогидродинамический институт им. проф. Н.Е. Жуковского
Разработка алгоритмов системы управления самолёта схемы «летающее крыло»
Рассматривается самолёт схемы «летающее крыло». Для анализа особенностей динамики самолёта данной схемы создана программно-математическая модель динамики самолёта в среде МАТЬАВ/ЗшшНпк. Предложена методика выбора параметров системы путевого управления самолёта с т@ > 0 с позиции обеспечения близкой к минимальной величины потребной скорости отклонения расщепляющихся щитков (РЩ) фПотр. Рассмотрены различные способы возможного снижения значений фПОтр при расчётных воздействиях. Проведена оценка потерь аэродинамического качества при использовании РЩ как органа путевого управления.
Ключевые слова: летающее крыло, синтез систем управления, СДУ путевого канала, система управления летающего крыла.
1. Введение
В настоящее время в мире ведутся разработки самолётов схемы «летающее крыло», как для военных, так и для гражданских нужд. На данном этапе развития авиационной техники уже существует несколько самолётов схемы «летающее крыло», в частности находящийся в эксплуатации стратегический бомбардировщик Northrop В-2 Spirit, ведутся доработки БЛА Х-47В, также находится в эксплуатации БЛА RQ-170. Ведутся разработки в Китае («Sharp Sword»), Великобритании («Taranis»), Франции («Neuron»), России («Скат»).
Данное компоновочное решение позволяет получить более высокие, чем у самолётов традиционных схем, аэродинамические характеристики крейсерского полёта за счёт снижения лобового сопротивления.
Однако аэродинамическая схема «летающее крыло» обладает рядом особенностей, значительно затрудняющих её использование. Первая – возможная путевая статическая неустойчивость как следствие отсутствия ВО, вторая – особенности зависимостей моментов рыскания и крена при использовании расщепляющихся щитков в качестве органа путевого управления. Это вызывает значительные проблемы с обеспечением потребных характеристик устойчивости и управляемости самолета и требует разработки специальной методики выбора параметров системы управления.
Целью данной работы является анализ аэродинамических характеристик компоновки самолета «летающее крыло», исследование динамики и устойчивости бокового движения самолёта данной схемы с системой управления при расчётных возмущающих и управляющих воздействиях, разработка алгоритмов СДУ с учетом необходимости минимизации потребных величин скорости отклонения органа путевого управления (расщепляющиеся щитки). Рассмотрены различные способы снижения потребной скорости отклонения органа путевого управления, проведён анализ их преимуществ и недостатков.
Кроме того, выполнено математическое моделирование полёта в турбулентной атмосфере с целью оценки влияния расщепляющихся щитков на величину аэродинамического качества.
2. Математическая модель
Описание объекта исследования. Объектом исследования является однодвигательный неманевренный самолёт схемы «летающее крыло». У данного самолёта отсутствует вертикальное оперение (ВО), управление по рысканию осуществляется с помощью расщепляющихся щитков (РЩ). Эффективность щитков (создаваемый момент рыскания) в зависимости от угла их раскрытия 5рщ и угла атаки приведена ниже (рис. 1). Следует отметить значительную нелинейность эффективности щитков по углу их раскрытия.
Атур(^щ)
Рис. 1. Эффективность щитков по раскрытию (5рщ) при различных углах атаки
Использованы основные аэродинамические характеристики, полученные при испытаниях в АДТ тематической модели самолета схемы «летающее крыло». Запас путевой устойчивости Шу варьировался в пределах т^ = 0.0002 … 0.0006.
В процессе исследований рассматривались следующие расчётные возмущения.
1) Вихревой порыв бокового ветра, моделируемый следующим образом:
у
Р™ = ±7Тгде Щ = ‘
п>щ V1
тго = 15 м/с.
3 ^ 20 м/с, V* =
м/с,
£ = 1 для Н=0;
Длина участка нарастания порыва варьируется от 30 до 200 м. Зависимость угла скольжения, вызванного ветром, /Зт от времени представлена ниже.
Рис. 2
2) Градиентный порыв бокового ветра. Максимальная интенсивность 15 м/с.
3) Турбулентная атмосфера со спектральной плотностью скорости боковых порывов ветра в форме Кармана:
Ф’Ш =
2 Ь 1 8(1.3339ЬП)2
^ [1 (1.3339ЬП)2]11/6′
где, аш – среднеквадратическое значение скорости ветра, Ь – интегральный масштаб турбулентности, О = ш/Уо – «пространственная» частота, ш – циклическая (временная) частота (1/с).
Для описания движения самолёта использовались системы уравнений продольного и бокового возмущенного движений в виде
dV_ ~dt
da ~dt
dcoz ~dt
dd
dt dH
Xo(a) в (a, S эл) ДХЭЛ ¿npaB(a, S эл)]
i=1
Д^-рщглев (a, ¿рщ) ДХрщ¿прав(a, щ) – g ■ во ■ в; 2
шх – -0(a) – ^[Д—лгЛев (a, 5эл) ДУЭЛ¿праB(a, Sэл)]
г=1
– – д
Д —щглев ^р Щ) Д —ЩÍпpав(a, ^рщ) ту ■ cos #0 ■
V0
М (a) ¿[Дм^л4лвв (a, 5Ш) ДМ^прав (a, ¿9Л)]
г=1
Д Д^е. (a, 5рщ) Д Мгрщ<птв ( a, Spщ) Д(a, М) ■ ш2; d a
Ш- Tt;
—— = V0 ■ cos 60 ■ § v ■ sin60; d
( dwq
d
diob
= М?(a, М) ■p М£х(a, М) ■ шх М*у(a, М) ■ Шу 2
^[Д Л^хл;прав (a, U – Д Мхэл4лвв(a, <W] Д Мхрщ;прав (a, <W – Д МхрЩ1птв (a ¿Рщ);
г=1
dry = М? ■p (a, М) ■Шх Муу (a, М) ■ Шу
d
у 2
МУэлinpaв to – Д 4лвв (a, <М] Д Мурш*прю (a sPщ) – Д МуРШ>прая (a, ÓPщ);
г=1
dp _ 2 ^ — = Шх ■ sina Шу ■ cos a ■ p ^[Д-^эл¿npa„(a, 4л) – (a, óэл)]
i=1
ZP4npaB(a, щ) – ZmmB(a, 5Pщ) — ■ cos a ■ sin7;
dl
— = Шх – Шу ■ tan §0;
dZ n ,
— = – V ■ cost/ cdotsinwa. d
В боковом канале алгоритмы управления основаны на идее разделения движения крена и рыскания в полусвязанной системе координат. Используются сигналы обратных связей
Шх Шу
скольжения и крена.
Для описания динамики рулевых приводов использовалась нелинейная модель первого порядка с учетом ограничения скорости перекладки (добротность приводов D = 25с-1).
Учитывается дополнительное запаздывание в системе управления, обусловленное наличием фильтров упругих колебаний конструкции и цифровой реализацией СДУ (^Т’цифр — 0.016с.
3. Программно-математическая модель самолета
Для моделирования движения самолета с системой управления разработана программно-математическая модель динамики самолета рассматриваемой компоновки в среде МАТЬАВ/ЗшшНпк с использованием программного комплекса Р^^Бии. Модель, показанная на рис. 3, 4, включает в себя следующие блоки:
• модель динамики самолета с органами управления,
• модель системы управления,
• модель приводов органов управления.
-Inlxl
File Edit View Simulation Format Tools Help
□ a y m ШЯЯ| Д11 s ► |но |нс™ы zl “WH? Ф ш sas®
Ready (100% | | |odel
Рис. 3. Математическая модель самолёта в среде MATLAB/Siriiulirik
BLIPS
Рис. 4. Структурная схема поперечно-путевого канала в среде MATLAB/Siriiulirik
4. Алгоритмы поперечно-путевого управления
Структурная схема системы поперечно-путевого управления самолета, используемой в данной работе, приведена на рис. 5. Алгоритм управления имеет вид
¿л – (
1
0.1р 1
9 К
Хн КШу • [шУе — • С08 • 8Ш 7 13
1
V
К
0.1р 1
£]) ^22 6Х • Е12;
8ЭЛ — (АЭЛ Кшх • шХе) • Е11 6у • Е2ъ
ние органа поперечного управления (элевоны), и основан на идее «развязки» управляющих моментов крена и рыскания в полусвязанной системе координат с помощью коэффициентов
Е12 Е21
связей по углу скольжения Д угловым скоростям рыскания и крен а шХе в полусвязанной системе координат (с передаточными коэффициентами соответственно Кр, КШу,КШх). Сигнал, пропорциональный у • вш7 • со8$, предназначен для улучшения характеристик спирального движения самолета с СДУ и уменьшения угла скольжения при вращении самолета но крену.
Рис. 5. Структурная схема поперечно-путевого управления
У
Выбор параметров алгоритма производился в следующем порядке:
1) Нелинейная коррекция эффективности органов управления по рысканию.
Так как зависимость момента рыскания А шУрщ нелинейна по углу раскрытия щитков, было решено подобрать такую корректирующую нелинейную функцию на выходе системы управления, чтобы обеспечить квазилинейную зависимость момента рыскания А туРщ (<У от управляющего сигнала (¿н).
При построении функции за основу были взяты следующие требования: а) зависимость А тУрщ близка к линейной;
б) после линеаризации значение АтУрщ при нулевом и полном раскрытиях щитков должно остаться тем же, что и без функции, то есть Ату(0°, 120°)безфункции = Ату(0о, 120°)сфУнкЦией- Была построена функция от двух параметров: угла раскрытия щитков и угла атаки nf (5рщ, а) (рис. 6).
–4 – 0 —10 -16 22 -26 alpha
60 Delta
Рис. 6. Нелинейная функция
2) Распределение управляющих сигналов по органам поперечно-путевого управления и выбор коэффициентов «развязок» управляющих моментов.
Закон распределения сигналов по органам поперечного (элевоны) и путевого (расщепляющиеся щитки) управления был выбран таким образом, чтобы разделить движение крена и рыскания в полусвязанной системе координат.
Sj R„
R12
R2i
V s-
R22
Sy ‘
Рис. 7. Схема перекрёстных коэффициентов
Выбор коэффициента перекрестной связи R12 производился из условия МУе = 0 при ^эл = ^элmax и ПРИ заданном 5Х, а коэффициента R2 из условия МХе = 0 при = var. Здесь
МУе = Му • cos a Мх • sin а; МХе = Мх • cos a — Му • sin a;
_ (Му ^Мх) _ _(Мх ^Му) ;
шу _ т2 ; Шх _ г2 ;
/у ■ (1 – тт) 1х ■ (! – ТТ)
Му, Мх – суммарные значения размерных моментов от всех используемых органов управления.
Для выбора коэффициентов К2 были использованы величины параметров, определённые при 5х _ -25°; 6у _ 0,10°, 20°, 40°; 60°, 120°, т.к. функция тХ линейна, а т^у нелинейна.
Таблица1
П21
а 0 10 20 40 60 120
-4 0,1320 0,0993 0,0800 0,0633 0,0417 0,0210
0 -0,0595 -0,0551 -0,0394 -0,0030 0,0020 0,0093
5 -0,0640 -0,0608 -0,0413 0,0097 0,0308 0,0521
10 -0,1801 -0,1682 -0,1356 -0,0681 -0,0249 0,0182
15 -0,5745 -0,4435 -0,3246 -0,2030 -0,1371 -0,0650
20 -0,4992 -0,4100 -0,3475 -0,2783 -0,1987 -0,0617
Т а б л и ц а 2
Ш2
-4 0 5 10 15 20
25 0,0759 0,1741 0,3350 0,6753 1,5846 1,3563
3) Коэффициенты обратных связей. При выборе коэффициентов обратных связей были использованы следующие основные требования:
а) должны быть обеспечены не менее чем двукратные запасы устойчивости по общим коэффициентам усиления системы управления;
б) требования к корням: доминирующие корни характеристического уравнения замкнутой системы «самолёт – СДУ»
Ар _(р – Асп) ■ (р – Акр) ■ (р2 2 ■ £ ■ р
должны удовлетворять следующим условиям:
• движение крена: Акр ^ -1… – 1, 5;
• боковое колебательное движение: недемпфированная частота у самолёта такого класса Шо ^ 0, 4с-1; относительное демпфировапие ^ ^ 0.5;
• спиральное движение: |АСП| ^ 0.05;
в) требования к «временным» характеристикам: требования к нормируемым параметрам переходных процессов. Время достижения угла крена 7 _ 30° после ступенчатого отклонения «ручки управления по крену» – ¿7 _ 2.5 с. Время затухания колебаний переходного процесса после импульса дачи «педалей» – ¿зат _ 10 с.
Рассматриваются взлётно-посадочный режим (Н _ 0 м, V _ 67 м/с (минимальная посадочная скорость ~ 240 км/ч, а ~ 8… 9°) и режим крейсерского полёта (Н _ 10 км, М _ 0, 8, горизонтальный полёт).
Для нахождения коэффициентов КШу и Кр использовалась методика, изложенная в работе [4]. Предложенные алгоритмы позволяют отображать границы области устойчивости и области желаемого расположения корней замкнутой системы «самолёт СДУ» в плоскость передаточных чисел К^учто позволяет формализовать процесс выбора коэффициентов обратных связей и делает его более наглядным. Автоматически вычисляются запасы коэффициентов усиления по верхней и нижней границе.
На рис. 8 приведен пример, иллюстрирующий расчёт передаточных чисел при угле атаки а & 8°, Шу = 0.0004, режим взлёт/посадка (V & 240 км/ч, Я = 0). На рисунке показаны границы доминирующих корней. Зелёная линия показывает минимальную частоту, красная максимальную, синяя колебательность чёрная (слева сверху) колебательная граница устойчивости, чёрная (снизу) апериодическая граница. Фиолетовая прямая соответствует значением корней при .гр = 2.
граница области желаемого расположения корней
6|-[—I-!—7-1—~—!-1-!-!-
« : : / ! : : : ‘ ! : / ! ! : : I . . / . . •
Рис. 8. Границы доминирующих корней
Выбранные значения коэффициентов обратных связей для различных приведены в таблице 3, соответствующие значения корней крена Акр, спирального движения Асп, собственной частоты ^о и относительного демпфирования £ также представлены в таблице 3. Выбранные значения коэффициентов обеспечивают выполнение основных требований, предъявляемых к корням характеристического полинома замкнутой системы «самолёт СДУ».
ТаблицаЗ
Значение корней системы «самолёт—СДУ» при выбранных коэффициентах
0 тУ Щ/кШу Дн .гр. ^о £ АСП Акр
0,0002 4 0,526 2 0,94 0,707 0.752 0,0249 -2,15
0,0003 6 0,585 2 1,19 1,11 0.932 0,0285 -2,15
0,0004 6 0,825 2 1,34 1,06 0.791 0,0247 -2,15
0,0005 6 1,072 2 1,49 1,01 0.678 0,0223 -2,16
0,0006 6 1,315 2 1,62 0,962 0.593 0,0206 -2,16
5. Минимизация потребной скорости отклонения органов путевого управления
Неустойчивость самолета в боковом движении и наличие ограничения скорости перекладки органа управления может приводить к потере устойчивости замкнутой системы «самолет-СУУ» при некоторых критических возмущениях большой величины (т.н. неустойчивость в «большом»). Исследование устойчивости самолета с системой управления в боковом движении при больших возмущениях проводилось с точки зрения влияния передаточных чисел на устойчивость в «большом» и минимизации потребной для устойчивости при расчетных возмущениях скорости перекладки фи0Тр.
Ниже приведены графики значений потребной скорости раскрытия расщепляющихся щитков фи0Тр от значений запасов по нижней границе устойчивости Дн гр коэффициентов обратных связей КШу, Кр, частоты вихревого порыва и степени путевой статической Р
неустойчивости ту.
Фпотр > Клгу = 2
Кууу = 3
Клг/= 4
= 4
Ге1а = 3
Ь-КТЙа = 2
Рис. 9. Парирование градиентного порыва ветра
Рис. 10. Парирование вихревого порыва ветра
На рис. 9 показана зависимость фп0Тр от Дн.гр при различных значениях коэффициентов обратных связей, при этом вдоль изолиний постоянных значений КШу запас устойчивости Дн.Гр меняется за счёт изменения коэффициента Кр/КШу. Потребная скорость раскрытия щитков ^¿потр искалась исходя из условия устойчивости при действии градиентного порыва ветра. По полученным данным видно, что при увеличении коэффициента КШу потребная скорость перекладки уменьшается, а при увеличении Дн гр, при фиксированном КШу, ^¿Потр
растёт. При Дн.гр=2 получаем минимальные потребные скорости. Дальнейшее снижение (^потр возможно только при нарушении требования к величине запаса по нижней границе.
На рис. 10 приведена зависимость потребной скорости ^¿Потр для обеспечения устойчивости при действии вихревого порыва (при фиксированном значении КШу и Дн гр). Также на графике представлены значения фпотр для градиентного порыва ветра, чтобы показать, что для парирования вихревого порыва ветра необходимы скорости раскрытия (рп0Тр в несколько раз больше, чем для парирования градиентного порыва. При Дн.гр = 2 также имеем минимальные потребные скорости. При «малой» степени неустойчивости самолета Шу ~ 0, 0002… 0, 0004 потребная величина ^¿Потр даже при наиболее неблагоприятном значении = 100… 120 м составляет 14… 60 град/с.
Возможна потеря устойчивости «в большом» по каналу рыскания при воздействии управляющего сигнала по крену. Причина такой неустойчивости – большие величины /3 при Д7 ^ 180°, 360°. На рис. 11 показана потребная скорость перекладки для данного случая в зависимости от коэффициента КШу. Изменение Дн.гр слабо влияет на ^¿Потр5 а чем больше тем меньше потребная скорость перекладки.
Рис. 11. Устойчивость «в большом» по командному сигналу по крену
На рис. 12 приведено значение параметра £зат (время затухания) при подаваемом импульсе в путевом канале при различных значениях параметров КШу (Дн .гр постоянна), га^. Также показано максимально допустимое время затухания в путевом канале. Чем больше КШу1 тем меньше время затухания.
Рис. 12. Время затухания на «импульс» педалей Рисунок 13 иллюстрирует зависимость ^¿Потр ПРИ различных коэффициентах обратных
связей КШу, Кр, различных запасах устойчивости по нижней границе Ян.гр, различных возмущениях от запаса статической устойчивости ту. На этом графике показано, что при значении ту _ 0.0004 величина фп0Тр достигает (а при увеличении ту превышает) принятую максимально допустимую скорость перекладки (риотр = 80 град/с.
Рис. 13. фпотр(™>$)
6. Разработка алгоритмов СДУ, обеспечивающих снижение потребной мощности привода органа путевого управления
В случае воздействия вихревого порыва ветра снижение величины (^потр, а следовательно, и мощности привода, возможно за счёт использования так называемого блока уменьшения потребной скорости (БУПС). Идея используемого в данной работе БУПС заимствована из работ Ю. Г. Живова и А. М. Поединка. В упрощённом виде для продольного канала управления алгоритм блока приведён в работе [3].
Рис. 14. Схема БУПС
Задача этого блока – уменьшить входной сигнал на привод при воздействии порыва ветра {/W = 0). Принцип работы БУПСа следующий: в канал путевого управления подаётся разность сигналов ДФрщ = К • (тТ 1 • /Зг — 1 • /), где значение параметра /Зг -геометрический («кинематический») угол скольжения при /W = 0) – вычисляется из уравнений движения, т.е /г = ^ • nz uy • cosa ux • sin a ^ • sin 7 • cos$, а величина угла /
Авторами идеи БУПС было рекомендовано выбрать величину постоянной времени Т^ в пределах 3-5 с, поэтому сначала для режима с неустойчивостью т^ = 0.0004 при Т^ = 5 с, исходя из условия минимальной скорости перекладки был выбран коэффициент усиления ^б = 4. Затем для найденного снова проводится подбор Т^ для того же га^.
Снижение скорости перекладки
Фпотр
К
N ЧЧ
-Кб = ( ч ).1 ■ч ♦ ч 4 N Ч
-Кб = 0,5 -Кб = 1 –Кб = 2 –К6 = 3 — – Кб = 4 –Кб = 5 -Кб = 6 —С^БЕЗ БУПСа I ^ –
— – ^ _ ~ —- —- —– —–
—- — ■ – ‘ ~ ~—
РИС. 15. 0потр№,^б)
На рис. 15 показаны значения (ри0Тр при различных параметрах БУПСа. Как показано на рисунке, с помощью БУПС и подборки его коэффициентов можно снизить потребную скорость при рассмотренной величине т^ = 0.0004 в 2 раза. Следует отметить, что с увеличением времени К^> происходит значительное снижение потребной скорости перекладки.
7. Начальное расщепление щитков
Помимо предложенного метода уменьшения мощности привода (потребной скорости перекладки), можно рассмотреть случай наличия начального расщепления щитков. Если щитки изначально не раскрыты, то они работают по очереди, а если щитки раскрыты изначально, то парировать любое возмущение СДУ будет как минимум с вдвое большей эффективностью, так как работать будут уже оба щитка (один щиток будет открываться, а второй – закрываться).
Рис. 16. ^потр при изначально раскрытых щитках
Для изначально раскрытых щитков отдельно подбираются коэффициенты обратных связей, так как их эффективность в этом случае другая. Процесс подбора выглядит так же, как и для не раскрытых щитков. Исходя из предыдущих вычислений, коэффициенты
необходимо искать с запасом по нижней границе 2 (Дн гр = 2). На рис. 16 представлена зависимость потребной скорости расщепления щитков при различной степени статической неустойчивости тугр при начально раскрытых щитках.
Рассматриваемое мероприятие эффективно с точки зрения снижения потребной скорости отклонения расщепляющихся щитков, которое по сравнению с вариантом с 5орЩ _ 0 составляет 50%. Но также имеют место и недостатки. Происходит снижение аэродинамического качества на 20%.
8. Результаты статистического моделирования
Потери аэродинамического качества при полёте в турбулентной атмосфере
Орган путевого управления, который должен парировать все возмущения при полёте в атмосфере, – расщепляющиеся щитки. При полёте в турбулентной атмосфере необходимо в каждый момент времени парировать колебания, создаваемые возмущения в путевом канале. Оценим потери аэродинамического качества, которые происходят из-за прироста коэффициента сопротивления при парировании возмущений, вызванных турбулентной атмосферой.
Рис. 17. Аэродинамическое качество (взлёт/посадка)
Рис. 18. Аэродинамическое качество (крейсер)
Были рассмотрены разные среднеквадратические значения боковой компоненты скорости ветра по Карману = 1…2. ..3 м/с). Рассматривался режим взлёт/посадка (V _ 240 км/ч, Н _ 0) и крейсерский (Н _ 10 000 м, М _ 0.8). На рис. 17, 18 пока-
заны значения аэродинамического качества при полёте самолёта в зоне турбулентности. Также показаны средние значения качества аэродинамического качества (математическое ожидание), среднеквадратическое отклонение (СКО) и дисперсия. Как видно из графиков, дисперсия в режиме полёта взлёт/посадка не больше 0.5, среднеквадратическое отклонение 0.67, среднее значение качества = 13.5. При полёте в крейсерском режиме СКО = 0.16, дисперсия = 0.03, среднее значение качества = 14,1.
Ранее было показано, чтобы уменьшить потребную скорость перекладки органов путевого управления, целесообразно изначально раскрыть расщепляющиеся элевоны. В исследовательских целях рассматривается начальное раскрытие на угол 5 _ 40°. Но при увеличении угла раскрытия увеличивается и сопротивление самолёта, а значит, падает аэродинамическое качество.
Рис. 19. Аэродинамическое качество (взлёт/посадка) при изначально раскрытых (зелёная линия) щитках и не раскрытых (синяя линия) щитках
Рис. 20. Аэродинамическое качество (крейсер) при изначально раскрытых (зелёная линия) щитках, и не раскрытых (синяя линия) щитках
На рис. 19, 20 показаны изменения аэродинамического качества при изначально закрытых (синяя линия) и раскрытых (зелёная линия) щитках, при значениях = 3 м/с. Средние значения качества (математическое ожидание) на режиме взлёт/посадка отличаются на ^ 3 единицы (20%). В крейсерском полёте среднее аэродинамическое качество (К = 14.1) больше. На крейсерском режиме полёта начальное раскрытие щитков приводит к падению аэродинамического качества АК ^ -5. Также представлена зависимость аэродинамического качества самолёта по углу атаки, при разных раскрытиях щитков, без учёта
турбулентности атмосферы. Как видно из рис. 21, при углах атаки а ~ 3 — 5° (крейсерский полёт) имеются существенные потери аэродинамического качества.
Рис. 21. Аэродинамическое качество при разных изначальных раскрытиях щитков
Анализируя потери качества, можно предположить, что для режима взлёт/посадка потери в 3 единицы аэродинамического качества приемлемы. То есть при взлёте/посадке, а именно при минимальных значениях скоростного напора, следует изначально расщеплять щитки, чтобы обеспечить приемлемую устойчивость и управляемость в путевом канале. Но на режимах, где аэродинамическое качество имеет важное значение и определяет JITX самолета, например крейсерский полёт, необходимость в раскрытии щитков отсутствует, скорости перекладки достаточно и при не раскрытых щитках.
Литература
1. Гуськов Ю.П.7 Зазайнов Г. И. Управление полётом самолётов: учебник для авиационных вузов. — М.: Машиностроение, 1980.
2. Бюшгенс Г. С., Студнев Р. В. Аэродинамика самолёта: Динамика продольного и бокового движения. — М.: Машиностроение, 1979.
3. Аэродинамика, устойчивость и управляемость сверхзвуковых самолётов / под ред. Г.С. Бюшгенса. — М.: Наука. Физматлит, 1998.
References
1. Guskov; U.P., Zagainov; G.I. Airplane flight control: Manual for aviation institute. M.: Mashinostroenie, 1980. (in Russian).
2. Bushgens; G.S.7 Studnev; R. V. Aerodynamics of airplane: Dynamics of long and side motion. M.: Mashinistroenie, 1979. (in Russian).
3. Aerodynamics, stability and controllability of supersonic aircraft. Ed. by G.S. Bushgens. M.: Nauka. Fizmatlit, 1998. (in Russian).
20
начальное расщепление 5 =0
начальное расщепление 8рщ = 40 ka
Су а
Поступила в редакцию 19.02.2023.
Система дистанционного управления р/у моделей: типы, датчики, мощность
 Рано или поздно, любой моделист, захочет управлять созданной им моделью. Для этого разработаны и выпускаются системы дистанционного управления.
Рано или поздно, любой моделист, захочет управлять созданной им моделью. Для этого разработаны и выпускаются системы дистанционного управления.
Типы дистанционного управления:
- индуктивное (модель находится в нутрии петли связи соединенной с передатчиком),
- инфракрасное (сигналы управления передаются с помощью излучающего инфракрасного светодиода),
- радиоуправление (на ВЧ и СВЧ диапазонах радиоволн).
Индуктивное управление было, наверное, самым первым способом дистанционного управления.
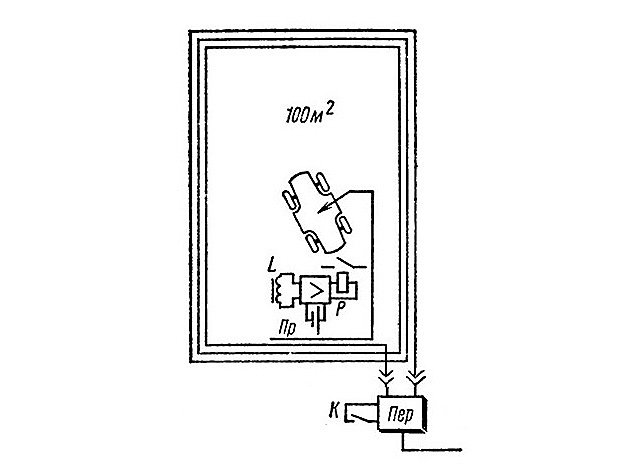
Оно работает в низкочастотном диапазоне. Использовалось свойство проводника с переменным током создавать вокруг себя электромагнитное поле. Если протекающий ток модулировать каким-либо образом создаваемое поле будет повторять модулирующий сигнал. Поднеся к этому проводнику катушку индуктивности в ней появится переменный ток повторяющий сигнал модуляции передатчика. Если этот провод подключить петлей к передатчику, то можно передавать дискретные команды в пределах петли связи. Передатчиком служит мощный усилитель низких частот, петля связи подключается вместо динамика, а приемником обычный приемник АМ сигналов. Недостатки такого вида дистанционного управления очевидны — ограниченное пространство, слабая помехозащищенность, применение только к наземным моделям. Система, конечно, очень ограничена, но как самая простая может, применятся начинающими.
Управление с помощью инфракрасного передатчика сегодня довольно распространено. Хотя оно тоже имеет некоторые ограничения, но все же имеет большую свободу, чем примитивное индукционное.

В передатчике используется инфракрасные светодиоды, на которые приходит управляющий сигнал. Обычно они стоят на передней части пульта управления под защитным колпачком. Для увеличения мощности излучения ставят несколько светодиодов последовательно. Незаметное глазу мерцание светодиодов распространяется в секторе до 180 градусов перед излучателем.

Излучение светодиодов, отражаясь от поверхностей стен и потолка, позволяет управлять моделью не только когда она перед оператором, но и в других положениях. Особенно это важно для летающих моделей вертолетов и квадрокоптеров. К сожалению, эта система дистанционного управления ограничена не только расстоянием, но и не любит яркий солнечный свет. Поэтому применяется только для комнатных малогабаритных моделей.
И наконец, самая распространенная и самая эффективная система дистанционного управления в моделизме — радиоуправление.
Это современное, надежное, многоканальное средство управления самыми разнообразными моделями. Оно прекрасно работает как с наземными, так и летающими и плавающими моделями. Начиналось все с однокомандных, громоздких устройств с небольшим радиусом действия. До недавнего времени передатчики работали на частотах в районе 27, 40 и 70 мГц. Это ВЧ диапазон частот разрешённых для аппаратуры радиоуправления. Но из-за сильного уровня помех, на этих частотах в наши дни, перешли на более высокочастотный СВЧ диапазон – 2.4 гГц.

Изменялся и способ модуляции сигналов управления. На первом этапе развития радиоуправления модуляции вообще небыло – приемник просто реагировал на появление несущей частоты при включении передатчика. Естественно так можно было передать только одну команду. Затем применили амплитудную модуляцию (АМ), как при радиовещании. Теперь, подключив к передатчику несколько низкочастотных генераторов, а в приемнике установив столько же фильтров на теже частоты на которых работают НЧ генераторы, можно передавать уже гораздо больше команд. Но эта система радиоуправления очень восприимчива к помехам. Для улучшения помехозащищенности радиоуправления стали применять систему частотной модуляции (FM). Это позволило радикально улучшить надежность передачи команд, да и количество команд так же увеличилось. К тому же, эта система модуляции, позволила перейти на пропорциональное управление. А последнее время стало выпускаться все больше аппаратуры с цифровым кодированием сигналов управления (РСМ). Здесь помехозащищенность еще выше. Все это позволяет увеличивать надежность и дальность передачи команд.

Базовая мощность распространенных передатчиков позволяет передавать команды на расстояние от 100 до 600 метров. Для авто- и судомоделей это расстояние ограничивается 100 метрами, а вот для авиамоделей дальность может достигать и нескольких километров. При такой дальности уже не обойтись без системы передачи изображения на мобильное устройство или очки виртуальной реальности – FPV . Большим достоинством современной радиоаппаратуры является возможность передавать не только дискретные команды – включение и выключение бортовых огней, выпуск и уборка шасси, выстрелы палубных орудий или установка дымовой завесы, но и передача пропорциональных команд. Это замечательная система команд придает управлению модели ощущение управления реальным объектом. Вы можете менять скорость или угол поворота модели так же как если бы управляли настоящим автомобилем или танком.

А воздушные модели, оснащенные такой аппаратурой, могут выполнять все то, что может современный военный или спортивный самолет или вертолет. С развитием мобильной связи и Wi-Fi стало возможным управлять моделью и получать изображение на мобильное устройство. Теперь, даже если вы боитесь высоты, вы все равно можете почувствовать себя пилотом. Применение системы FPV по Wi-Fi с передачей изображения на смартфон, позволяет взглянуть на землю с высоты птичьего полета не сходя с места.

Большое разнообразие моделей аппаратуры радиоуправления от трех канальных для простых автомоделей и лодок, до шести и даже двенадцатиканальных для самолетов и кораблей дает возможность подобрать нужную вам аппаратуру для воплощения всех ваших идей.