

- Как понять что ваш дрон попал под глушилку?
- Общие характеристики квадрокоптера сведены в таблицу.
- Low pass
- Pid controller
- Rpm filter
- Базовые принципы полета квадрокоптера
- Дрон не подключается к мобильному телефону или контроллеру.
- Видео
- Интеллектуальные режимы неправильно срабатывают в полете
- Квадрокоптер не взлетает, кренит на бок
- Квадрокоптер не реагирует на пульт
- Не включается (не взлетает, не работает) квадрокоптер: ищем и устраняем причины
- Не вращается один или несколько двигателей
- Несколько простых советов: как предотвратить поломку дрона
- Проблема может быть в пульте
- Проблема: беспилотный wi-fi подключается к контроллеру, но не к смартфону.
- Пульт дистанционного управления отключается при полете
- Советы по полетам на квадрокоптере
- Советы по устранению неполадок подключения wi-fi дрона, которые нужно попробовать в первую очередь
- Статьи в тему:
Как понять что ваш дрон попал под глушилку?
Прежде всего по исчезновению спутников. В случае подмены – сначала исчезают настоящие и появляются поддельные. Также в случае подавления GPS. Спутники могут исчезнуть на определенной высоте.
Как только почувствовали неладное – не нужно ждать, что все станет хорошо. Скорее всего не станет. Начинайте снижение. Поскольку значительная часть глушилок работает начиная с высоты 30 метров (а верхняя граница неизвестна), не стоит пытаться взлететь выше и ближе к спутникам.
Если приземлиться получилось, не стоит взлетать снова. Второй раз может не получиться.
С электромагнитными генераторами сложнее, так как работают они прицельно, включаются не надолго. Благо, что их пока не очень много. Кроме того за работу генераторов часто принимают различное промышленное оборудование, влияние ЛЭП, электростанций и прочего.
Стоит внимательнее выбирать место, откуда взлетает дрон и куда придется садиться. Если Вы поднимаетесь через небольшое окно между деревьями – посадить дрон туда же в случае нештатной ситуации будет под силу далеко не всем.
Полеты в центре Москвы (да и других крупных городов) тоже так себе затея. В последнее время стоит также остерегаться и больших парков типа Поклонной горы, Царицыно и пр.
Изучите местность. Проверьте наличие различных государственных ведомств, заводов и прочих “нехороших” объектов. За основу стоит взять народные карты типа
wikimapia.org – там больше данных, чем на “причесанных” Яндекс картах.
На некоторых форумах советуют снимать ограничения No Fly Zone, в таком случае коптер не пойдет сразу на посадку если вы попали под глушилку которая подменяет координаты, но так вы лишаетесь гарантии и в случае полета в запрещенном месте или аэропорту вы получите неплохой штраф или .
Если дрон еще на земле не видит больше 6-и спутников (в наше время с Глонасс и GPS их должно быть намного больше), не стоит взлетать вообще в надежде, что они появятся.
Тренируйте навыки полета без GPS. Купите игрушку или соберите недорогой FPV дрон для оттачивания навыков ручного управления и реакции без электронных помощников.
При возможности купите GPS трекер с сим-картой и установите на дрон. Он может помочь найти коптер, если он все таки улетит в неизвестном направлении.
Наше видео советы как бороться с глушилками?
Общие характеристики квадрокоптера сведены в таблицу.
| Бренд название | Caldecott | Камера характеристики видео | 1080 P HD |
| Страна происхождения | Китай | Камера характеристики фото | 4K HD |
| Номер модели | L900 | Интеграция с камерой | камера включена |
| Расстояние ДУ | до 1200 м | Аэрофотосъемка | Да |
| Каналы управления | 4 канала | Видео пилотирование | Да |
| Wi-fi расстояние передачи изображения | 300 – 600 м | Оптическое увеличение | 50 |
| Высота полета | 120 м | Подключение | Через приложение |
| Бесколлекторный двигатель | 1503 | Wi-fi соединение | 5G |
| Частота | 2,4 G | Частота смены кадров | 25 fps |
| Вес | 213,8 гр | Емкость литиевой батареи | 7.4V 2200mAh |
| Диаметр основного винта | 30,2 см | Управление жестами/распознавание видео | 1 – 3 М |
| Мощность двигателя | 25 W | Цвет | Черный, Оранжевый, Серый |
| Время полета | 27 мин | Время зарядки передатчика | Около 1 часа |
Специалисты советуют выбирать комплект с несколькими аккумуляторами. Хорошо когда в комплекте 2 аккумулятора, но как показывает практика, лучше иметь 3 батареи. На Алиэкспресс обращают особое внимание на наличие низкой цены, поэтому комплекты могут быть минимальны.
Low pass
Фильтры
Как показывает предыдущий график — сигнал от гироскопа содержит информацию от 0 Гц до 1000 Гц, но нас интересует только диапазон 0-80 Гц, поскольку это фактическое движение квадрокоптера, о котором должен знать PID-контроллер. Таким образом, нам нужно решение для фильтрации, чтобы позволить низким частотам проходить через PID-контроллер, в то же время ослабляя высокие частоты, и для этого мы можем использовать фильтр Low Pass (Низких частот).
Фильтры нижних частот пропускают низкочастотный сигнал и ослабляют высокие частоты, которые в основном являются просто шумом.
Устанавливается частота среза, и контроллер просто уменьшает сигналы выше этой частоты. Кривая затухания позволяет не срезать все под чистую, а чем выше частота шума, тем сильней происходит его затухание, плавно.
Часто пилоты допускают ошибку устанавливая такой фильтр на той же частоте, что и видимый шум. Например на 200Hz. Поскольку фильтр плавно ослабляет шум, установка такого фильтра не даст особого результата. Фильтр стоит устанавливать на более низкие частоты. Возможно, даже на 80Hz.
Чем ниже вы устанавливаете такой фильтр, тем больше фильтрации происходит
Устанавливая фильтрацию, следует помнить об одной простой вещи. Чем больше фильтрации тем больше задержка. Понятное дело, что она в миллисекундах и не значительная, но для PID-контроллера это критично. Так как он начнет реагировать на события позже, а это значит, что он будет пытаться выровнять квадракоптер в прошлом 🙂
Pid controller
PID Controller — это такая система которая корректирует позицию квадрокоптера согласно стикам (вашему управлению) или заданного положения (ну, что бы его не колбасило). PID настраивается за счет 3х параметров — P, I и D. К сожалению в этой статье мы не будем детально рассматривать настройку PID. Если вы пилот, то уже знаете, а если новичок, но на эту тему будет отдельная статья.
Эта система хорошо работает, когда количество шумов минимальна, иначе мы можем столкнуться с такими проблемами как осцилляция (вибрации) или перегрев моторов.
D term в PID контроллере имеет особенно отношение к шуму. D сглаживает быстрые движения, но вычисление D в PID контроллере значительно усиливает шум в сигнале. Это означает, что шум от гироскопа существенно усиливается значением D term и поэтому мы фильтруем в двух местах — гироскоп и D.
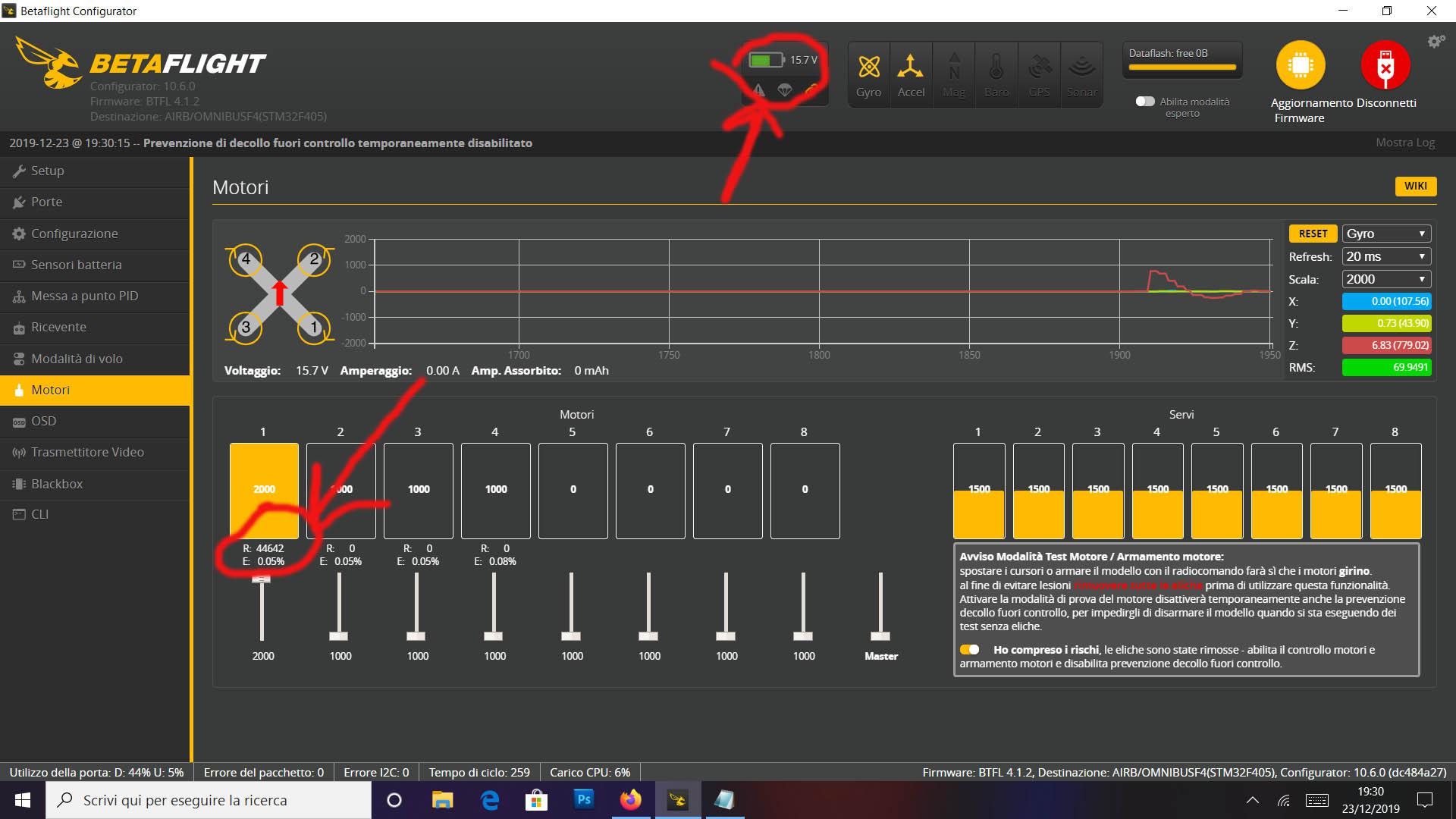
В качестве примера такого приумножения покажу вам такие вот логи:Первый график — гироскопВторой график — PIDТретий — моторы
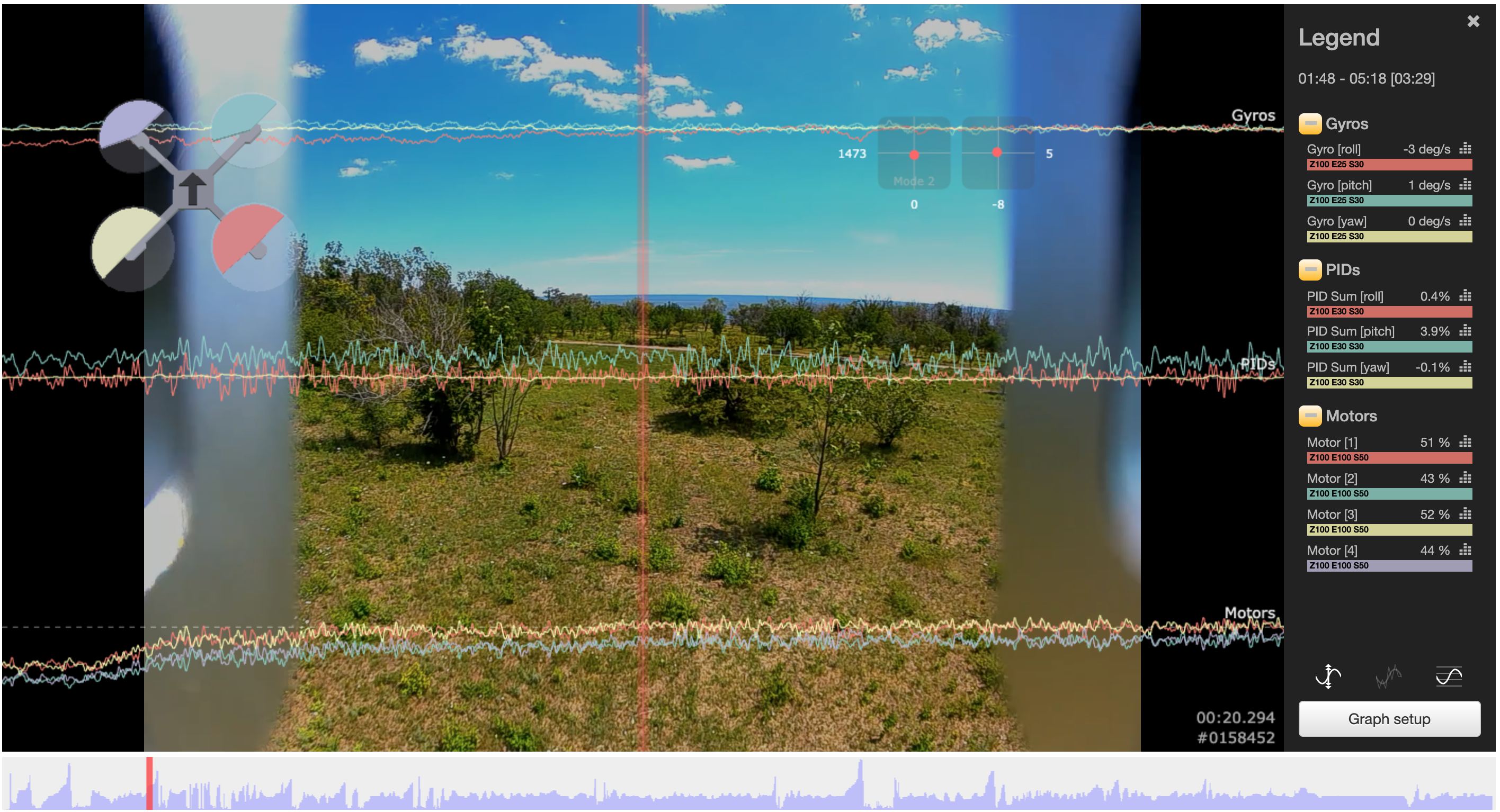
(это нормальные пропеллеры, с немного уменьшенной фильтрацией)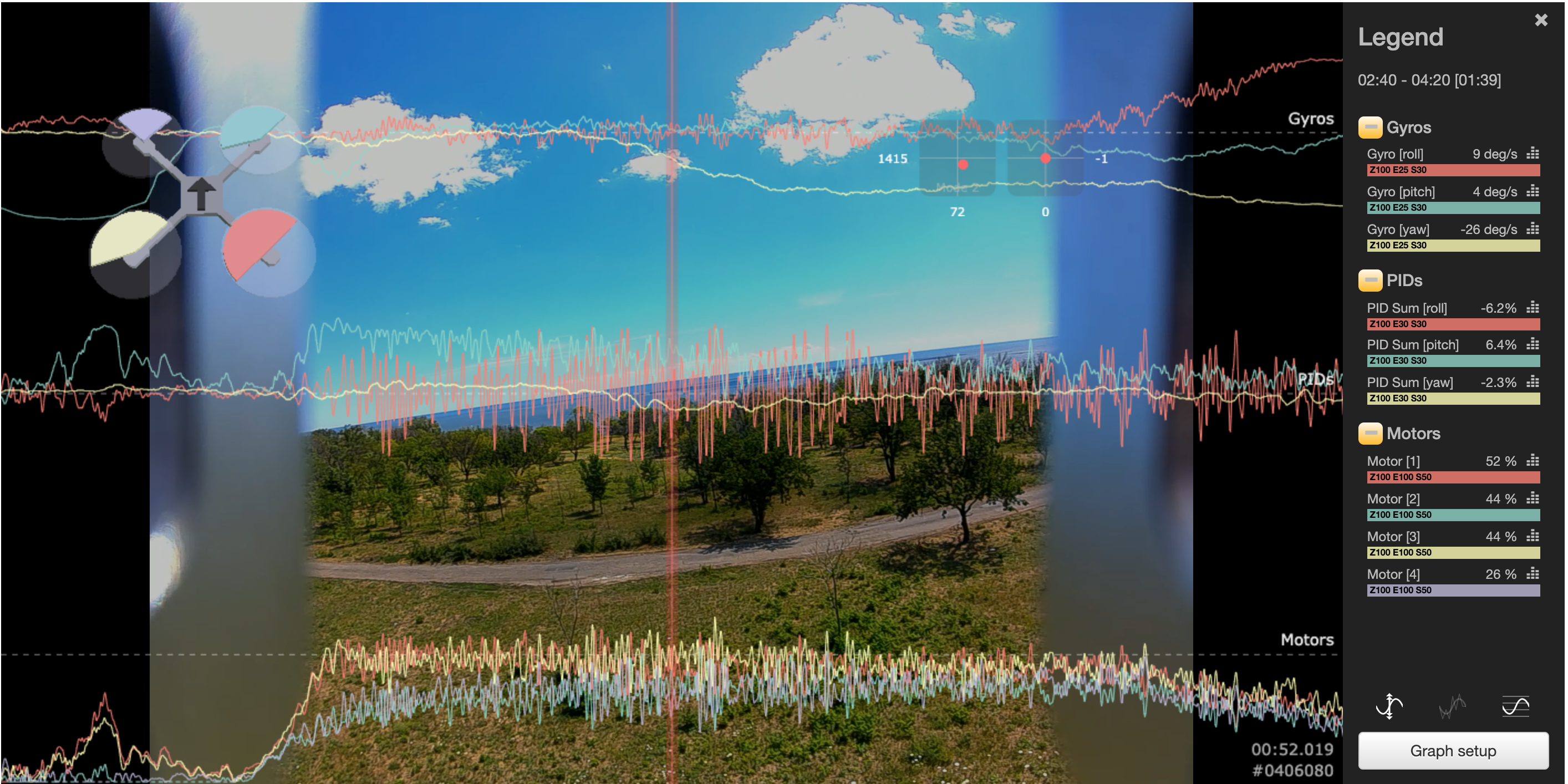
(Как видите вибрации от плохих пропеллеров усиливаются на этапе PID контроллера, что ведет к излишнему напрягу моторов, их буквально колбасит)
Скрины из — Blackbox Explorer.
Rpm filter
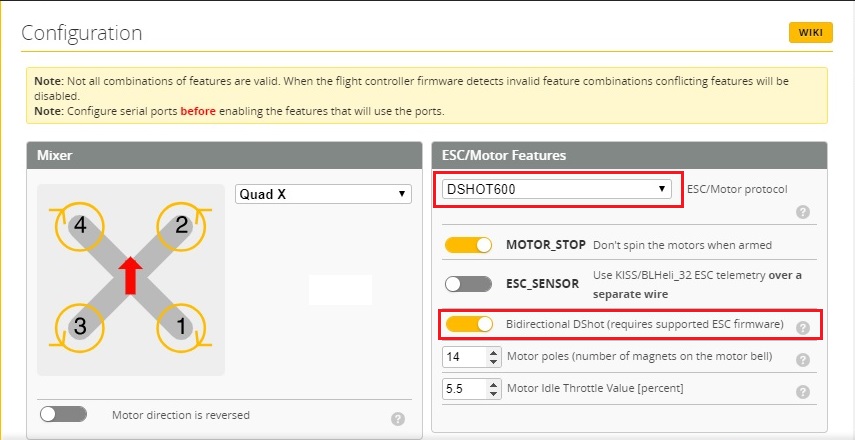
Так вот, собственно, что новое я стал использовать, так это RPM фильтрацию. Она работает за счет двухстороннего протокола DSHOT который позволяет полетному контроллеру узнать точное количество оборотов конкретного мотора. И уже на основании этих данных применяется фильтрация.
(Ваш ESC должен поддерживать двухсторонний DHSOT)
Прошивка на ESC, от 3.7
Если моторы греются, то это проблема. Горячие моторы могут быть признаком того, что на моторы попадает много шума и они пытаются реагировать на вибрации так часто, что начинает выделяться тепло.
Греться моторы могут по ряду причин, старая рама, погнутые колокола у моторов, нарушенная балансировка, лишние прибомбасы на вашем коптере.
Конечно лучше иметь, как говорят clean build, и что бы все было новое, но можно сперва попробовать настроить фильтрацию.
Для начала можно начать с увеличения фильтрации D, делать шаги в 20 Hz. Проверяйте температуру после каждого такого шага и найдите свой оптимальный диапазон.
А искать его следует между температурой моторов и вибрациями. Как было сказано выше, хоть и фильтрация призвана уменьшить количество шума, она может накладывать некоторые задержки и PID контроллер может не успевать. И как бы это смешно не было, вызывать вибрации. Но эти вибрации не относятся к пропвош. Это уже просто неэффективная работа PID.
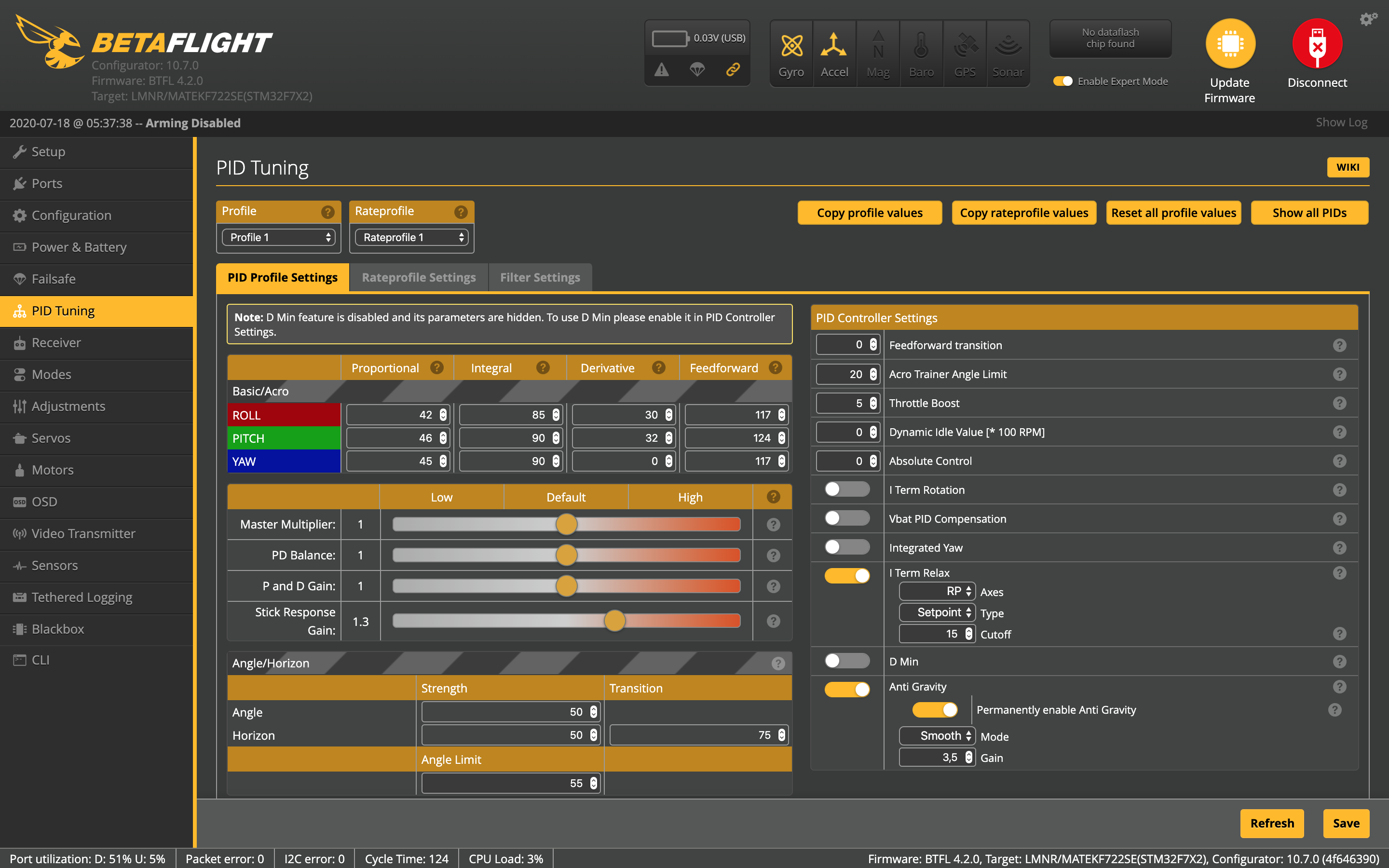
В последних версиях Betaflight есть ползунки, пробуйте не менять значения самих фильтров, а попробуйте использовать эти «мастер» ползунки.
На текущий момент у меня такие настройки с включенным RPM фильтром, возможно я попытаюсь уменьшить фильтрацию еще больше:
Базовые принципы полета квадрокоптера
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Каждый квадрокоптер оснащен четырьмя винтами (квадро — четыре) постоянного шага. Под каждым винтом установлен небольшой двигатель коллекторного или бесколлекторного типа. Два винта совершают вращение против часовой стрелки, и два – по часовой.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
Дрон не подключается к мобильному телефону или контроллеру.
Решение 1: Первое, что вам следует попробовать, — это сбросить Wi-Fi Anafi. Этот процесс не вернет ваш беспилотник к заводским настройкам, но он будет полностью обновлен. Вы можете сделать это, выполнив следующие действия.
- Во-первых, включите свой беспилотник.
- Нажмите и удерживайте кнопку питания в течение 8 секунд. Красные огоньки начнут включаться один за другим. Как только все 4 индикатора загорятся, можно безопасно отпустить кнопку.
- Затем WI-FI дрона перезагрузится. При перезагрузке он также создаст TXT-файл на microSD, в котором будет указан пароль WI-FI дронов.
- Давайте сразу перейдем ко второму решению для подключения Anafi.
- Во-первых, вам нужно будет выключить свой беспилотник, закрыть свой Skycontroller и отключить контроллер от вашего мобильного телефона.
- Затем вам нужно будет перезагрузить телефон и переключить его в режим полета. Убедитесь, что Bluetooth и Wi-Fi отключены.
- Теперь вам нужно будет настроить свой беспилотник так, как вы обычно делаете перед полетом.
- Но на этот раз используйте другой кабель при подключении Skycontroller 3 к вашему мобильному устройству.
- Если приложение FreeFlight 6 автоматически запускается после выполнения вышеуказанного, это означает, что соединение между приложением FreeFlight 6 вашего мобильного устройства и Skycontroller 3 было восстановлено.
- Если использование другого кабеля не удается, попробуйте удалить приложение FreeFlight 6 и переустановить его снова. Обновление на вашем телефоне могло повлиять на разрешения приложения. ВАЖНО, что этот шаг приведет к удалению всех имеющихся у вас носителей, для которых не была создана резервная копия.
Если это не сработает, есть другое решение, которое вы можете попробовать.
Решение 2: Это решение было опубликовано самими Parrot. Просто убедитесь, что вы создали резервную копию любого носителя. Это решение навсегда сохранит все файлы, включая носители на FreeFlight 6, которые не были скопированы. Поэтому убедитесь, что вы сделали резервную копию всего, что хотите сохранить!
Если после выполнения описанных выше действий он все еще не работает, попробуйте использовать другой мобильный телефон или даже Ipad. Если ничего, то проблема, вероятно, лежит немного глубже. Я бы рекомендовал обратиться в службу поддержки.
Видео
Интеллектуальные режимы неправильно срабатывают в полете
Неэффективная работа интеллектуальных режимом напрямую связана с количеством спутников, с которыми установил связь дрон. Если спутников недостаточно, система GPS работает неправильно. В помещениях ситуация еще хуже, т. к. под крышей коптер может вообще не подключиться. Облачность и плохая погода мешают беспилотнику установить связь со спутниками на открытом пространстве.
В таких случаях рекомендуется подождать хорошей погоды, т. к. подобные полеты могут обернуться поломкой техники. Нередко летающие аппараты теряют управление прямо в воздухе, и все это сопровождается падением оборотов пропеллеров. Еще одна причина плохой связи со спутниками — неисправность модуля GPS. Проблема встречается очень редко.

Квадрокоптер не взлетает, кренит на бок
Если при полете аппарат сносит в сторону, имеет место быть неверная калибровка. Чтобы решить проблему, поставьте квадрокоптер на ровную поверхность, подложив под отклоняющийся луч листы бумаги. Также подойдет и ровный лист картона. После повторной калибровки, как правило, проблема решается.
Если сваливание на бок после калибровки не прекратилось, а только уменьшилось, воспользуйтесь триммерами на пульте управления. Начинающие пользователи часто забывают о пилоте триммеров. Также, одна из распространенных ошибок у новичков — некорректная настройка гироскопа.

Отказ от взлета часто обусловлен неправильной установкой двигателя или винтов. Еще раз внимательно осмотрите маркировку каждой детали – если замечено несовпадение, проведите разбор и установку в соответствии со схемой в инструкции.
Квадрокоптер не реагирует на пульт
Если между машиной и ПДУ нет связи, в первую очередь проверяется пульт. Разряженный аккумулятор и севшие батарейки – распространенная причина отсутствия связи. Сигнализирует об отсутствии заряда в батарейках и загорающийся индикатор на коптере. В этом случае просто замените батарейку и оцените результат.
В некоторых случаях владелец аппарата неверно выполняет последовательность действий при запуске. Важно поэтапно и правильно соблюдать шаги, описанные в инструкции. К примеру: если на старте устройство лежит неправильно (на боку, перевернуто кверху вниз), оно не будет реагировать на пульт при команде подняться в воздух.
Если рекомендованные меры приняты, а аппарат по прежнему не видит пульт, проблема кроется внутри ПДУ. Возможно, нарушены контакты, имеется обрыв проводков. Иногда проблема решается чисткой контактов (в случае окисления батареек).

Не включается (не взлетает, не работает) квадрокоптер: ищем и устраняем причины
Неполадка |
|
|
Квадрокоптер не связывается с передатчиком | Стик газа стоит в неправильном положении | Зафиксируйте газ до упора на себя и не двигайте стик до тех пор, пока дрон не свяжется с аппаратурой |
Потух индикатор на пульте дистанционного управления | Батарейки разрядились | Заменить элементы питания |
Посторонние шумы при полете дрона, лишняя вибрация | Поврежден корпус и/или пропеллеры квадрокоптера | Определите дефект «на глаз», осторожно выровняйте поврежденный пропеллер или замените его |
Электродвигатели работают, но беспилотник не взлетает | Неправильно установлены винты | Проверьте маркировку каждого пропеллера и установите винты согласно схеме в руководстве пользователя |
Отказал мотор | Нарушены контакты или сгорел двигатель | Проверьте провода и контакты, идущие к двигателю и полетному контроллеру; если визуально все хорошо, то возможны проблемы с двигателем или контроллером. Нужна помощь мастера |
Квадрокоптер резко реагирует на команды пульта ДУ | Возможно, выбран режим «эксперт» | Начинать полеты рекомендовано с режима для новичков; выберите режим пилотирования согласно вашим навыкам |
Квадрокоптер не выполняет сложные фигуры | 1.Неправильно выбран режим полета 2.Аккумулятор дрона на низком уровне | 1.Убедитесь, что выбран режим «эксперт» 2.Проверьте уровень заряда АКБ, может дрону просто «не хватает силы» |
Коптер постоянно «несет» в одну из сторон | Неправильная калибровка | Установите дрон на ровной поверхности, сделайте подкладку тонкого картона под тот луч, в сторону которого коптер отклоняется в полете. Проведите калибровку. Проблема должна исчезнуть |
Нестабильный полет | 1. Проблемы с калибровкой 2.Низкий заряд АКБ | 1.Установите дрон на максимально ровную поверхность и проведите калибровку повторно. При необходимости проведите дополнительное триммирование 2.Зарядите аккумулятор полностью |
Если наши советы вам помогли, рады были вам помочь. Если неполадки остались – обращайтесь к нашим специалистам.
RC-Hobby предлагает ремонт радиоуправляемых моделей любой степени сложности, а консультации по телефону мы даем абсолютно бесплатно.
Не вращается один или несколько двигателей
Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.
Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить.
Несколько простых советов: как предотвратить поломку дрона

Квадрокоптеры – сложные механизмы, состоящие из множества взаимодействующих систем. Пусть не всегда возможно отследить программные и технические сбои, вы все же можете снизить риск их поломки и даже потери. Конечно, некоторые поломки происходят ввиду факторов, на которые невозможно повлиять. Так почему случаются аварии? Рассмотрим самые популярные сценарии.
Пропеллеры большинства дронов сделаны из прочного материала, но, чтобы не навредить окружающим, они довольно гибкие. По этой причине есть вероятность, что после нескольких ударов они могут потерять форму, а это приводит к искажению траектории полета. Проверяйте их состояние перед каждым запуском. Самый очевидный совет, мы согласны. Но многие пилоты пренебрегают им, в особенности после нескольких удачных полетов, когда кажется, что научился всему и следующей съемке ничто не помешает.

Уверены, вы знаете, что летая рядом с высокими зданиями, уровень сигнала GPS существенно слабеет. Пытаясь установить связь со спутником, коптер часто неверно восстанавливает точку взлета для возвращения на «базу». Так что если вы нажмете кнопку Return to Home, беспилотник может врезаться в первое же попавшееся на пути препятствие. Установите в качестве точки взлета место расположения пульта управления, а чтобы избежать помех на пути – задайте высоту возвращения домой более 100 метров. Этого хватит, чтобы перелететь все, что может быть в округе, если вы не находитесь вблизи телевышек и других очень высоких сооружений.
Также, перед тем как воспользоваться функцией Return to Home, удостоверьтесь, что ваш дрон поддерживает режим автоматического преодоления препятствий. Если нет, то после нажатия на клавишу RTH беспилотник просто проложит до точки взлета прямой путь, на котором могут оказаться ветки, здания или провода электропередач. Это неминуемо приведет к серьезной аварии. Решается проблема аналогично предыдущей: задаем высоту функции возвращения домой более 100 метров и ждем коптер обратно.

Еще одна самая распространенная причина крушения – неправильно настроенный компас. Его параметры могут сбиться от любого магнитного или радио воздействия. Старайтесь держать дрон подальше от источников излучения подобного рода, например, от автомобильных колонок, а также не летайте вблизи линий электропередач и телевышек.
Создать аварийную ситуацию может и внезапное отключение видеосигнала. Случается это из-за поврежденных проводов для подключения пульта ДУ к смартфону или планшету. Всегда проверяйте их целостность перед полетом и аккуратно отключайте после.
Не стоит забывать и о том, что летать можно только при полностью заряженном аккумуляторе, а идти на посадку лучше при уровне заряда в 30%. Если возникнут какие-то трудности, вы успеете разобраться с ними или найти другое место для приземления.

Даже опытные пилоты не защищены от аварий. Иногда это может случиться по вашей вине, иногда из-за неконтролируемых вами обстоятельств. Так что же тогда делать?
- Проверьте не сломан ли коптер. Если есть какая-то видимая поломка, запомните ее, так как, вам придется описывать ее при обращении в службу поддержки.
- Выключите пульт управления, достаньте батареи, снимите пропеллеры и очистите дрон от песка, земли и прочего мусора.
- Переверните беспилотник так, чтобы шасси оказались наверху, и покрутите моторы. Так вы избавитесь от забившегося в них мусора. Осмотрите каждый мотор, чтобы убедиться, что он находится на месте и ничего не сломано.
- Проверьте угол наклона стабилизатора, его крепления, целостность камеры и батареи, поищите трещины и отломанные части.
- Сняв пропеллеры, проверьте каждый на предмет деформации. Сломанные – замените.
- Продуйте каждую движущуюся часть дрона от песка и пыли.
После осмотра и завершения всех проверок советуем перезагрузить устройство.
- Вставьте батарею обратно в коптер и дождитесь его включения.
- Настройте компас и попробуйте повернуть стабилизатор с помощью пульта ДУ.
- Проверьте моторы, включив их без пропеллеров, а потом с установленными винтами.
- Поставьте дрон на ровную поверхность и запишите тестовое видео, чтобы проверить, есть ли дрожание камеры или размытость.
- Сделайте один тестовый полет на малой высоте. Чтобы убедиться, что все работает нормально, выполните стандартные движения (вперёд, назад, влево, вправо и т.д.).
Если вы выполнили все пункты, но коптер все равно отказывается включаться или работать, то советуем позвонить в техподдержку DJI. Консультанты помогут устранить вам поломку и расскажут, в чем была проблема.
Проблема может быть в пульте
Между такими игрушками не редко устраивают соревнования, используют их для качественных снимков с высоты птичьего полета. Квадрокоптеры способны выполнить поставленные профессиональные задачи, но для этого пилот должен обладать навыками управления агрегатом, а сам он моментально реагировать на пульт.
Как и любая техника квадрокоптеры могут ломаться, причиной этому может быть падение, время, неаккуратность и не соблюдение эксплуатационных условий, продиктованных производителем в инструкции. Огромное множество брендов и модификаций отличаются размерами и функционалом, но все однозначно могут выйти из строя, независимо от стоимости и надежности.
Квадрокоптером управляют приемник и пульт, через которые передается команда от пилота к аппарату. В зависимости от модели пульт может отличаться по:
- Форме;
- Размеру;
- Дизайну;
- Расположению кнопок и рычагов.
Независимо от вида все они построены по одному принципу и имеют два джостика. Именно они отвечают за координацию квадрокоптера, его полет и вращение. Есть в продаже модели с сенсорным управлением, тогда джойстик не имеет физической формы, а отображен на экране.
- Поворота;
- Активации и выключения;
- Набор скорости;
- Переворот;
- Смена направления.
Со временем может возникнуть ситуация, когда пульт просто перестает передавать сигнал квадрокоптеру, соответственно тот становится неуправляем. Первое, на что советуют обратить внимание специалисты – батарейки. Очень просто, но их замена не редко возвращает прежнюю работоспособность.
Проблема: беспилотный wi-fi подключается к контроллеру, но не к смартфону.
При возникновении этой проблемы вы можете увидеть, как WI-FI контроллера дрона появится в настройках подключения смартфона к WI-Fi, однако реального WI-FI дрона нигде не будет видно. Если это кажется вам знакомым, попробуйте выполнить следующие действия, чтобы вернуть WI-Fi дронов на ваш телефон.
- Первый шаг — открыть приложение DJI GO.
- Нажмите на текст “Нужна помощь” в левом нижнем углу главного экрана приложения слева от “Введите устройство”.
- Как только вы нажмете, откроется новый экран, на котором будет показано, как подключить телефон к Wi-Fi дронов.
- Нажмите на синюю кнопку ниже, на которой написано “сбросить настройки Wi-Fi в самолете”.
- Затем приложение даст вам четыре шага о том, как сбросить Wi-Fi дронов. Выполните следующие действия.
- Теперь вы должны иметь возможность вернуться в настройки WI-Fi вашего телефона, и должен появиться дрон.
Если вы не можете найти четыре шага о том, как сбросить настройки WI-Fi дронов, я изложу их вам здесь.
Вот как сбросить настройки WI-FI DJI:
- Во-первых, вам нужно нажать и удерживать кнопку питания в течение 9 секунд. Вы поймете, что сделали все правильно, когда трижды услышите звуковой сигнал.
- Беспилотник пройдет процесс сброса. Он переключится на управление мобильным устройством и изменит его частоту на 2,4 ГГц.
- Как только ваш беспилотник начнет мигать зелеными передними огнями, это означает, что WI-Fi дрона правильно сброшен.
- Откройте настройки мобильного Wi-Fi, и теперь должно появиться имя вашего дрона.
Пульт дистанционного управления отключается при полете
Если у вас нет управления вы не сможете управлять своим дроном, даже если сможете его увидеть. Ваш дрон должен запустить режим точки возврата Failsafe Return-To-Home, который он установил сразу после взлета.
Если дрон улетел на большое расстояние, вы можете помочь пульту дистанционного управления подключиться. Вот несколько советов.
Двигайтесь к своему квадрокоптеру, сокращая расстояние между пультом и дроном. Если вы находитесь рядом с работающим двигателем, генератором, линиями электропередачи и т. д., Это может ослабить сигнал, приводящий к отключению. Поэтому отойдите от любых помех в направлении дрона, и он может просто переподключиться.
Проверьте направление антенны пульта дистанционного управления. Направлена ли антенна в правильном направлении. Если дрон находится довольно высоко в воздухе, вам нужно изменить угол наклона пульта дистанционного управления, чтобы антенна была направлена прямо на него.
Выключите и снова включите пульт – стоит попробовать, так как это займет всего несколько секунд.
Возврат к домашнему безотказному режиму — если вы летите в широком открытом пространстве без каких-либо препятствий на пути. Режим RTH вернет квадрокоптер обратно в исходную точку. Это очень полезная функция особенность.
Советы по полетам на квадрокоптере
Откалибруйте компас — особенно если вы летите в новой области, которая находится на большом расстоянии от последнего места, где вы летали. Также выполните калибровку, если вы получили сообщение в приложении DJI Fly для калибровки. Обязательно откалибруйте компас после жесткой посадки и где нет физического повреждения дрону.
Не летайте — пока у вас слабый сигнал GPS.
Обновление прошивки — проверьте и обновите прошивку для дрона и пульта дистанционного управления. Кроме того, установите последнее приложение DJI Fly, когда оно станет доступным.
Электромагнитные помехи. Многие электромагнитные помехи могут вызвать проблемы с компасом квадрокоптера и возможностями полета, в том числе его точное местоположение в небе. Следите за электромагнитными помехами в той области, где вы будете летать.
Читайте: Как запускать квадрокоптер в городе с электромагнитными помехами?
ЭМП — это помехи, создаваемые одним электрическим устройством другому электромагнитными полями. Электромагнитные помехи (EMI), также называемые радиочастотными помехами (RFI) в радиочастотном спектре, представляют собой помехи, создаваемые внешним источником, который воздействует на другую электрическую цепь.
Примерами EMI являются линии электропередач, мачты сотовых телефонов, здания из армированной стали, электрические кабели, мосты, железнодорожные линии, автомобили и электрические устройства.
Советы по устранению неполадок подключения wi-fi дрона, которые нужно попробовать в первую очередь
Обычно, когда WI-FI-соединение вашего дрона не подключается, относительно просто выяснить, что произошло, потому что все эти проблемы с подключением так тесно связаны. Вот некоторые из наиболее распространенных советов по устранению неполадок, которые помогут решить проблему с подключением как можно скорее.
- Удалите и переустановите приложение дрона на свой телефон. Часто, когда ваш мобильный телефон обновляется, это может повлиять на разрешения ваших приложений.
- Попробуйте подключиться к другому телефону. Это быстрый способ определить, проблема ли с вашим дроном или телефоном.
- Попробуйте использовать Ipad. Я читал о случаях, когда Ipad может использовать более высокие частоты WI-Fi по сравнению с вашим мобильным телефоном. Если это сработает, то, скорее всего, ваш телефон не поддерживает частоту WI-Fi дронов.
- Вы можете попробовать сбросить WI-Fi своих дронов. Если все вышеперечисленное не удастся, это может быть проблемой с WI-Fi дронов. Лучший первый шаг — попытаться сбросить его. Я подробно изложил это в остальной части статьи.
- Чтобы обойти Wi-Fi, подключите телефон к контроллеру с помощью прилагаемого USB. если это возможно, некоторые дроны не позволяют подключить ваш мобильный телефон к контроллеру с помощью USB. Но если у вас есть такая возможность, попробуйте!
- Проверьте, отключается ли ваш беспилотный WI-Fi во время жесткой посадки. Во время жесткой посадки ваши дроны могли отключить WI-Fi. Я видел эту проблему с дроном ProMark p70, в котором камера, содержащая WI-Fi, отключалась от сети.
Если эти общие советы не сработали, проблема, вероятно, является общей проблемой с подключением дрона из-за неисправного производства или чего-то в этом роде. Я составил список всех наиболее распространенных проблем с подключением, которые я мог найти в интернете. Продолжайте читать!
Статьи в тему:
Как запустить квадрокоптер. Только для начинающих пилотов: включение, калибровка, триммирование
Как научиться управлять квадрокоптером: советы и упражнения
Что нужно знать о пропеллерах для мультикоптера: терминология, материалы, балансировка
Для чего в квадрокоптере барометр или Как работает режим удержания высоты
Квадрокоптер с функцией «follow me»: дрон, который всегда рядом
«Headless mode»: что это такое, с чем его едят и нужен ли этот полетный режим в квадрокоптере





 купить по привлекательной цене 46990 руб. в Москве")