
(1).1398090126084.1437337826051.prev-565x400.jpg "От земли к FPV Квадрокоптеру: Собираем свой первый квадрокоптер (Whoop) / Хабр")
Whoop? что это?
Это маленький квадрокоптер с пластиковой рамой и абсолютно схожим набором компонентов. Единственное, что может отличаться — это коллекторные моторы. Но и бесколлекторные так же популярны и доступны.
Еще такие квадрокоптеры называют Tiny Whoop. Парни постарше — Cine Whoop. Они уже способны поднять на своем борту gopro.

(Такие испольpуются для близкой съемки и съемки в помещениях)
Из особенностей Whoop, мне нравится, что они меньше, безопасней и куда более живучие. Можно не бояться, пролетать во всякие щели и ветки деревьев. Главное не застрять где-то на верхушке.Это просто отличный вариант для тренировок и как средство борьбы со страхом пролетать узкие места. Многие гонщики даже делают мини трассы и тренируются на них.
Можно летать среди людей, а детские площадки становятся, просто мега классными треками (ну только когда они пустые, иначе его съедят). Whoop это как в том фильме, где главные герои уменьшились до размеров насекомых. Точно так же и тут. Можно пролетать под лавочками, а новый уровень опасности — мусорки.
Конечно, есть разница в тяге и она очень чувствуется, на видео в начале поста, я еще не очень освоился и часто плюхался на землю. Такие маленькие пропеллеры хуже справляются со всякими воздушными явлениями (propwash etc.). Но в целом ощущения очень похожи и удовольствие просто концентрированней.
Fpv. от начинающего начинающим. часть 1. близко и низко.
Естественно первый самолет должен быть хорошо управляемым и стабильным в полете. При этом в силу определенных причин не хотелось брать большой самолет. Если быть до конца честным, первым как и у многих был FPV Raptor, и, как у многих, летал он мягко говоря сильно специфично… В силу недостатка опыта на тот момент, я не смог разобраться, что основная проблема Раптора – не правильный выкос двигателя. В итоге Раптор был отложен, а в последствии доведен до ума и продан, ну не лежала к нему душа как-то. А в качестве первого носителя был приобретен упомянутый выше
 Готовый к полету планер Sky Easy размахом 1050мм с 4-х канальной радиоаппаратурой 2.4 ГГц (комплектация RTF, mode 1)
Готовый к полету планер Sky Easy размахом 1050мм с 4-х канальной радиоаппаратурой 2.4 ГГц (комплектация RTF, mode 1)  Товарhttp://www.parkflyer.ru/product/644013/
Товарhttp://www.parkflyer.ru/product/644013/
, для простоты самолет был прозван Изя.
Критерии, которым руководствовался при выборе:
– малый вес в штате, чтобы был запас для установки FPV аппаратуры;
– материал – EPO, чтобы легко и просто ремонтировался;
– умение лететь медленно, потому как пилот был чайник;
– хорошая самостабилизация;
– достаточный объем полезного простанства в фюзеляже;
– толкающая мотоустановка;
– размах крыльев 1м -50мм, чтобы можно было носить не разбирая;
В итоге остался доволен им до невозможности.
Характеристики самолета:
– Размах крыльев 1050мм
– Длина 863мм
– Полетный вес с FPV оборудованием до 630гр. в зависимости от батареи.
– Мотор колокольчик 2730 2000KV
– Регулятор хода 18А  TURNIGY Plush 18А регулятор скорости для бесколлекторных двигателей
TURNIGY Plush 18А регулятор скорости для бесколлекторных двигателей  Товарhttp://www.radiocopter.ru/product/4312/
Товарhttp://www.radiocopter.ru/product/4312/
(стоковый регулятор загнулся где-то на 20 полете из чего были сделаны соответствующие выводы)
– Пропеллер 7х4
– Полетное время около 15 минут
– Запас хода около 10км
– Крейсерская скорость около 40 кмч.
Т.к. Изя официально не является платформой для FPV, то пришлось немного доработать конструкцию.
Так выглядел фюзеляж изнутри изначально:.1398093004544.1437337981828.prev.jpg)
Для размещения оборудования поверх всего этого были вклеены две пластиковых полки для оборудования и батарей, которые оклеил сверху липучкой:
Для размещения оборудования поверх всего этого были вклеены две пластиковых полки для оборудования и батарей, которые оклеил сверху липучкой:
От носа через фюзеляж и хвостовую балку до самого стабилизатора вклеил карбоновую рейку квадратного сечения 3мм (ее под полками не видно) для придания кострукции дополнительной жесткости.
Часть фонаря кабины была удалена и туда было вклеено крепление для камеры, а впоследствии для пан-тилта.
Так самолет выглядел когда впервые полетел в качестве FPV носителя, тогда еще без автопилота и пан-тилта для камеры:
Теперь перейдем к электронной начинке:
– Камера OSD Menu 650TVL HD SHARP CCD Starlight WDR Board Camera 2.8mm
– Видеопередатчик BEV 1.3G 400mW transmitter for FPV (до этого летал на передатчике 200mW, в этом сезоне решил немного проапгрейдиться)
– Low pass Filter LPF1200/LPF1400 (включается между видео передатчиком и антенной, глушит частоты больше 1,4ГГц, чтобы исключить негативное влияние на РУ 2,4ГГц)
– Антенна квадрифилярная 1.3ГГц круговой поляризации
– Микрофон Mini Microphone CCTV Security
– .jpg) Автопилот Arkbird с OSD V3.1020 Товарhttp://www.radiocopter.ru/product/691352/
Автопилот Arkbird с OSD V3.1020 Товарhttp://www.radiocopter.ru/product/691352/
Arkbird
– .jpg) FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV) Товарhttp://www.radiocopter.ru/product/101891/
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV) Товарhttp://www.radiocopter.ru/product/101891/
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV)
–  “Пищалка” для поисков модели в траве от Hobby King Товарhttp://www.radiocopter.ru/product/102775/
“Пищалка” для поисков модели в траве от Hobby King Товарhttp://www.radiocopter.ru/product/102775/
для поиска
– .jpg) TURNIGY 3A UBEC с помехоподавлением Товарhttp://www.radiocopter.ru/product/4319/
TURNIGY 3A UBEC с помехоподавлением Товарhttp://www.radiocopter.ru/product/4319/
TURNIGY 3A UBEC
– Видео батарея 11.1В 3S 360mAh
– Ходовая батарея 7.4В 2S 1000-1300mAh
Первое время летал без автопилота, пару раз чуть не погубил самолет из-за отказов видеотракта, но нервы все же дороже, потому обзавелся и ничуть не жалею. ArkBird прост в настройке, умеет управлять оборотами двигателя и вполне адекватен, есть правда один серьезный минус: при срабатывании Faile Safe (а именно это является для автопилота сигналом возвращать самолет домой) на земле или на минимальной высоте, при том, что самолет удален от базы больше чем на 30 метров, ArkBird пытается вести самолет домой, даже если тот, предположим, нештатно приземлился вдалеке от базы. Эту нехорошую его особенность разработчик исправлять почему-то не спешит. Набор фунций достаточно стандартен для подобных устройств: гиро-режим, режим полной стабилизации с поддержкой высоты и курса, режим полета по точкам, режим автоматического возврата на базу. Поучаствовать в обсуждении этого автопилота можно Автопилот Arkbird с OSD V3.1020 Товарhttp://www.radiocopter.ru/product/691352/
или здесь.
Что касается выбора камеры – это был компромисс между дорогим и всеми признанными Pixim SeaWolf 690TVL (которые кстати довольно тяжелые и громоздкие) и чем-то дешевым, но с мерзкой картинкой. Всем начинающим могу посоветовать не экономить 20 у.е. разницы и обязательно брать камеру с технологией WDR, что позволит летать при сложном освещении (например низкое солнце) и при этом видеть объекты на земле, а не черное пространство без ориентиров.
Микрофон – много копий поломано на форумах о необходимости иметь микрофон на борту, я стопроцентный сторонник его наличия, т.к. это идеальный источник информации о состоянии двигателя. При этом вес и энергопотребление минимальны, так что экономить на нем не стоит.
Для радиоуправления диапазон 2.4ГГц был выбран по нескольким причинам. Во-первых самолет изначально планировался под “близко и низко”, поэтому дальнобойная система ему не сильно нужна. Во-вторых, учитывая не большие размеры пепелаца, грамотно разместить на нем антенну на 433МГц будет проблематично ввиду ее не маленьких размеров. Что касается влияния видео передатчика 1.3ГГц на приемник РУ: при использовании LowPass фильтра никаких проблем выявлено не было.
На данный момент внутренности самолета выглядят так:
Достаточно удачно получилось сделать развесовку, батареи устанавливаются как раз в районе центра тяжести самолета, поэтому центровка не зависит от их веса. В основном сейчас летаю на 1300mAh 2S, но запас по грузоподъемности еще остался.
Наружность самолета выглядит так:
Как видите, пришлось пожертвовать фигуркой пилота, его место занял приемник GPS от автопилота ArkBird.
Радиоуправление на земле постоено на базе Turnigi 9X (слегка доработанной, 
Как видите, пришлось пожертвовать фигуркой пилота, его место занял приемник GPS от автопилота ArkBird.
Радиоуправление на земле постоено на базе Turnigi 9X (слегка доработанной, Внедрение джойстика от PS2 в аппаратуру Turnigy 9X 116
28 ноября 2023 года в 17:22 Евгений Кочетков Большие Вяземы, Московская Обл Статья http://www.radiocopter.ru/blogs/view_entry/3131/
, для удобного управления пан-тилтом) с модулем  FrSky DHT 8-ми канальный DIY передатчик с телеметрией Товарhttp://www.radiocopter.ru/product/103811/
FrSky DHT 8-ми канальный DIY передатчик с телеметрией Товарhttp://www.radiocopter.ru/product/103811/
и ретранслятора, который описывал  Отдельностоящий (выносной ретранслятор) модуль РУ для FPV. 44
Отдельностоящий (выносной ретранслятор) модуль РУ для FPV. 44
24 октября 2023 года в 11:39 Евгений Кочетков Большие Вяземы, Московская Обл Статья http://www.radiocopter.ru/blogs/view_entry/2695/
. Дальнобойность ретранслятора без бустрера – до 2,5км, вполне достаточно для “близко и низко”. Для полетов подальше можно использовать бустер, почитать на эту тему можно тут.
При компоновке придерживался приципа раздельного питания. Видеотракт питается от отдельной батареи  Аккумуляторы Rhino 360мАч 3S 11.1В 20C Li-po Товарhttp://www.radiocopter.ru/product/7302/
Аккумуляторы Rhino 360мАч 3S 11.1В 20C Li-po Товарhttp://www.radiocopter.ru/product/7302/
, которой хватает на 50мин. работы (напомню, полетное время около 15 минут), вес ее при этом составляет всего 33гр. – т.е. совсем не значительный. В результате получаем страховку от потери видео сигнала, что вполне вероятно может случиться при просадке ходовой батареи, от которой питается двигатель. Да и ко всему прочему у данного пепелаца ходовая батарея 2S 7.4В, таким образом ее напряжения не достаточно для питания видеотракта, которому необходимо 12В, можно конечно использовать повышающий DC-DC конвертер, но надежность системы из-за этого только пострадает. Ну и кроме всего прочего: отдельное питание видео тракта – простейший и самый надежный способ избавиться от помех по питанию, генераторами которых являются регулятор хода и сервомашинки.
Также вместо встроенного в регулятор BEC использовал дискретный BEC на 3А (красный провод из трехпинового разъема от регулятора был извлечен и заизолирован), от которого запитал бортовое оборудование (сервы, приемник, автопилот), т.к. нередки случаи потери бортового питания вследствие проблем с регулятором скорости, вплоть до пробоя встроенного BEC, когда тот начинает гнать на борт полное напряжение батареи не стабилизируя его. Так же нередки случаи отключения встроенных BEC из-за перегрева. Учитывая все вышеперечисленное, дискретный BEC – хороший способ повысить надежность аппарата, даже если регулятор скорости погибнет, есть шанс спланировать, т.к. управление продолжит функционировать..
Схема питания электроники:
Наземную станцию описывать пока не буду – это тема для отдельной статьи.
В целом, самолет получился удачный. Для полетов близко и низко очень хороший вариант, но надо учитывать, что придется немного доработать.
Дополнение по просьбам читателей:
Летаю по телевизору 17″, очки пробовал – не понравилось, может потому, что HeadPlay не дают такого ощущения погружения, как те же FatShark, не знаю, их не пробовал, но было ощущение, что сидишь в темной комнате и смотришь на монитор, который от тебя на расстоянии метр. Задержки ощутимые тоже не улучшали впечатления. Опять же полет по телевизору позволяет быстро переключиться с полета от первого лица, на полет от третьего. Сажаю в основном от третьего лица, за исключением нештатных случаев, когда до базы еще далеко, но такое было всего пару раз, не дотягивал метров 50 всего-лишь, самолет цел, так что сажать от первого лица вполне реально. Есть товарищи, которые исключительно от первого лица предпочитают взлетать и садиться, но для этого хорошая полоса нужна, а у меня такой к сожалению в ближайшем доступе нет. Ну тут уж на вкус и цвет, кому-то полет в очках кажется лучше, кому-то по телевизорумонитору.
Что касается тех самых мелочей:
– при полете на значительные расстояния, для возможностей самолета, само собой лететь надо против ветра, чтобы по ветру домой возвращаться, но не забывать, что в зависимости от высоты полета направление ветра может меняться, поэтому постоянно контролировать это, то есть мониторить свою скорость по GPS, естественно надо знать крейсерскую скорость своего пепелаца и на ее основе прикидывать, что там с ветром происходит. Опять же настраивая автопилот учитывать скорость ветра и крейсерскую скорость пепелаца, чтобы при автоматическом пилотировании по ветру не довести самолет до сваливания – это касается автопилотов не имеющих датчика воздушной скорости, например тот самый ArkBird. Посему при ветре, скорость которого больше половины крейсерской скорости пепелаца стараюсь не летать вообще.
– при полетах на высоту не забывать соответствующим образом ориентировать антенны, как на земле, так и на аппарате. В основном это касается антенн РУ, которые в большинстве своем диполи. Вообще стоит поизучать диграммы направленности различных типов антенн, гуглится эта информация без проблем.
– для полетов в пределах 2км вполне достаточно будет той конфигурации, которую описал в этой статье. Более мощный передатчик на видео ставить наверное не стоит. Что касается управления, тот же FrSky, если управление реализовать через ретранслятор, вполне пробивает 2,5км. Вообще ретранслятор сделать очень рекомендую, дальнобойная антенна на пульте – извращение по-определению.
В этом году сезон FPV открывал тоже полетами на Изе. Уже практически традиция =) ну и навыки после зимы на нем восстанавливать – самое то.
Вот небольшая нарезка видео с курсовой камеры, с открытия сезона в этом году (YouTube видео подпортил солидно, в оригинале разрешение 720х576, зачем оно его в 360р ужало – загадка):
Прошлогодняя запись на HD камеру с борта:
Свежее видео, полет на 4км удаления. Автопилот заменен на EagleTree OSD Pro, гадость та еще, но Арк понадобился для новых проектов.
Спасибо за внимание! Всем мягких посадок и летной погоды!
Продолжение следует.
З.Ы. Если у кого-то возникли вопросы по существу – задавайте, не стесняйтесь, всем постараюсь ответить.
==================================================================
Мои предыдущие статьи:Отдельностоящий (выносной ретранслятор) модуль РУ для FPV. 44
24 октября 2023 года в 11:39 Евгений Кочетков Большие Вяземы, Московская Обл Статья http://www.radiocopter.ru/blogs/view_entry/2695/Увеличиваем максимальный угол отклонения стандартной сервомашинки. 60
17 ноября 2023 года в 16:56 Евгений Кочетков Большие Вяземы, Московская Обл Статья http://www.radiocopter.ru/blogs/view_entry/2958/Внедрение джойстика от PS2 в аппаратуру Turnigy 9X 116
28 ноября 2023 года в 17:22 Евгений Кочетков Большие Вяземы, Московская Обл Статья http://www.radiocopter.ru/blogs/view_entry/3131/Про выкладывание видео YouTube в ленту и т.п. 39
18 апреля 2023 года в 22:50 Евгений Кочетков Большие Вяземы, Московская Обл Статья http://www.radiocopter.ru/blogs/view_entry/7755/
Аккумуляторы
Как я уже говорил выше, аккумуляторы для whoop должны быть маленькими и как правило это 1S — 2S.
S — это ячейка, номинальным вольтажем в ~3.7 вольта.
На экземпляре который я собираю, моторы делают 18 тысяч оборотов на вольт и для них вполне достаточно 1S.
У меня нет опыта с выбором аккумуляторов под whoop, но из того, что мне известно — существует два основных вида коннектора — PH и BT 2 который якобы лучше.

(PH)
(BT 2)
В комплекте шли 4ре BT 2 и собственно к самому квадрокоптеру припаян такой разьем.
Видео оборудование
Видео оборудование мы будем использовать аналоговое. Согласен, это прошлый век, но, к сожалению, цифрового радиолинка с вменяемой ценой я пока не нашел. В таблице я указал ссылки на оборудование с частотой 900 Мгц, и это неспроста. Дело в том, что RC-аппаратура у нас работает на частоте 2,4 ГГц и, чтобы ей не мешать, выбираем AV-радиолинк с частотой подальше.
Специально для нашего самолета продают устройство поворота камеры. На него можно навешать всё видео оборудование, в итоге получится некий моноблок. Склеиваем его по следующей видео инструкции:
В комплекте видео оборудования все контакты идут типа тюльпан, отрываем их и всё жестко спаиваем, мы же самолет делаем, а не танк — экономим каждый грамм. Камеру и видео передатчик приклеиваем на двухсторонний скотч. В итоге у Вас должно получиться что-то в виде этого.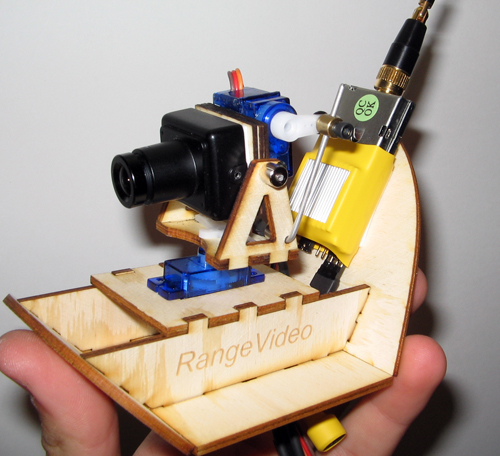
Все это должно четко встать в паз для фонаря самолета.
Для видео приемника я рекомендую приобрести path антенну, С её помощью качество принимаемого видеосигнала увеличится в разы, но возникнет одно НО. Path антенна имеет диаграмму направленности и поэтому лучше летать в секторе, в котором эффективность антенны лучше всего, либо чтобы кто ни будь Вам помогал и направлял антенну на самолет.
Все наземное оборудование подключается предельно просто, все разъемы и провода есть в комплекте. Подключаете антенну к приемнику, потом очки, и подаете на все это питание и видите в очках картинку с самолета.
Доставка
Доставка бывает разная, и нужно смотреть конкретно по магазинам. Я очень нетерпеливый в плане ожидания ништяков, поэтому в основном это DHL.
Но самое главное это бабки — DHL или сам этот getfpv обходит таможню тем, что в чеке стоят цены поделенные на 100. Конечно, доставка не дешевая (30-60 баксов), но до меня долетает за ~4 дня прямо из США.
DHL не работает по выходным. Вы знаете, что посылочка уже в стране, а получить ее сможете только в понедельник. Аж бесит. Но их можно понять, вероятно, им придется нанять в два раза больше сотрудников для посменной работы. А учитывая, что DHL международная компания, это будет стоить значительно.
Делайте заказ на выходных или в понедельник. К концу неделе уже будете встречать свою посылочку.
Остается только одна маленькая проблема — аккумуляторы.
Дело в том, что они в некотором роде опасны и многие компании доставки/магазины отказываются перевозить такие товары самолетами. Скорей всего это ужесточилось после эпизодов с горящими на борту самолета самсунгами, но это не точно.
Одно из правил — аккумулятор должен быть заряжен/разряжен не более чем на 30%. А LIPO не очень любит такой уровень при длительном хранении. Заряд хранения примерно равен 50%. И разумеется никто доставая аккумулятор со склада не будет его разряжать.
Только один раз мне попался вот такой аккумулятор, у которого прямо на коробке было написано — “поставляется с 30%, зарядите как можно скорей!”
Эта проблема решается ноунейм сторонними перевозчиками, приходится делать заказ на локальную фирму (адрес) в США и они уже как-то получают это посылку и отправляют. Я с этим не возился и нашел аккумуляторы в наших магазинах. Выбора меньше, но хватает.
Завершая моменты про доставку добавлю — аккумуляторы, которые идут в комплекте — доставляются без проблем. Правда больших Lipo в комплектах — не видел. Но это актуально для того, что мы собираем в этой статье. Тем более таких аккумов у нас попросту нет.
Зарядка
Процесс зарядки точно такой же как и больших Lipo, только если у вас одна ячейка, то балансировать не надо. В этом же комплекте пришла зарядка, которую можно купить отдельно:
Плюсом и минусом зарядки является порт XT60. С одной стороны это удобно, можно взять Lipo побольше и от него заряжать аккумуляторы прямо в поле на покатушках. А с другой стороны не всегда под рукой есть заряженный аккумулятор.
Эта проблема решается покупкой переходника, а блок питания у меня уже был:
Только одна проблема, которую я пока не решил — вывод аккумулятора на вольтаж хранения. Данная зарядка умеет только заряжать, и все. Моя зарядка для аккумуляторов побольше не умеет работать с 1S, поэтому я просто стараюсь не разряжать их до потери пульса. Это конечно сокращает время полета в среднем до 2-3х минут.
Мой первой whoop
(я еще не мега блогер, но может быть интересно, что я заказал и как это все выглядит в коробках)
Для себя я выбрал бандл без аппаратуры и очков, так как они у меня есть. С начала я думал собрать с нуля, но на глаза попался прикольный вариант “fpv crate” своего рода лутбокс от магазина, в который накидываются всякие ништяки со скидкой. В том месяце был Whoop несколько кастомных деталей, зарядка и самое главное, в комплекте были аккумуляторы.Аккумуляторы под Whoop должны быть маленькими и это 1S или 2S по питанию.
На такой whoop не поместится цифровое FPV, а очки у меня только под цифровое FPV. Мне пришлось докупить аналоговый приемник. Я не стал экономить и взял себе популярное решение под Fat Shark — rapidFIRE:
Обошелся он как весь этот бандл, но я взял на вырост, потом будут ловить им сигнал от дальнолетов.
У моих очков есть аналоговый вход и к ним отлично подключаются данный приемник через небольшой переходник:
Еще из дополнительного — приемник (управления) на квадрокоптер, так как в комплекте нечего не идет. У меня на аппаратуре стоит лонгрендж система Crossfire, собственно докупил nano версию приемника.
Радиоаппаратура
Радиоаппаратура состоит из передатчика и приемника. К приемнику подсоединяются уже вклеенные Вами сервоприводы. Сервоприводы приводят в действие органы управления самолетом.
В таблице цен я указал ссылку на аппаратуру Futaba 10CG 2.4GHz. Сразу предупрежу, что это дорогая аппаратура, но тут есть несколько подводных камней. Если Вы хотите использовать датчик поворота головы, то, по сути, кроме футабы вариантов больше нет — ко всем другим комплектам аппаратуры подключить датчик поворота головы без костылей не получится, и не факт что будет работать как надо.
Самолет
Я предлагаю использовать самолет
. Этот самолет стал стандартом для FPV, для него есть куча различных прибамбасов и огромное количество статей и
. Сам самолет продается в виде комплекта для сборки. Для сборки самолета Вам потребуется только
. Сам процесс сбора описывать смысла нет, в комплекте есть инструкция, да и испортить там что-то просто нереально, самолет немецкого производства, поэтому там все четко и красиво. Главное, не забудьте вклеить двигатель и Сервоприводы. 3 часа работы — и Ваш самолет будет готов к полету, ну и 10 минут отмыть руки от клея :-).
Сборка

(моторы не перестают удивлять своим размером)
Сборка данного экземпляра очень простая, буквально конструктор. Только нужно сделать скидку на хрупкий пластик и маленькие размеры. Достаточно легко сорвать резьбу или случайно, что-то сломать.
Пайки минимально, это вам не 5ть дюймов, где только на моторы от 9 до 18 критических мест пайки. Моторчики у вупа насколько маленькие, что просто коннектятся через разъем. Хотя конечно, и у квадрокоптеров побольше есть такая возможность. Наверное bullet connectors удобны при масштабах побольше.

(все внутренности)
В комплекте идет FC — flight controller (полетный контроллер) в который сразу встроенно 4 ESC (регуляторы скорости для бесколлекторных моторов). Обычно у квадрокоптеров ESC идет отдельно от полетного контроллера, а иногда даже 4ре отдельных ESC распределительная плата питания. Поскольку тут токи меньше, все впихивается на одну плату.
Единственное, что нужно припаять, так это приемник. Ну я справился, значит и вы справитесь 🙂
Круто, что VTX (камера и передатчик видео) был сразу припаян к полетному контроллеру. А сам полетный контроллер уже прошит Betaflight, настроен и готов к полету.
Подав питание через usb порт (он используется для подключения к компьютеру, прошивок и настроек), убедился, что все мигает как надо и подключился аппаратурой к приемнику.
Далее просто запихнул все на пластиковую раму
В комплекте шли уже всем давно привычные резиновые демферы под полетный контроллер (минимализирует вибрации)
Вторым по сложности было засунуть камеру в купол, и то тут на фотке не правильно, я потом переделывал, она тряслась во время полета.
А самое сложное — это пропеллеры. Только потому, что я ступил. На таких квадрокоптерах пропеллеры никак не прикручивают, а просто вдавливают на вал. Снимается это чудо крайне некомфортно. Но мне пришлось, так как оказывается направленности вращения, отличается от братишки постарше.
Возможно этот выбор не обусловлен нечем, а возможно так лучше для маленьких квадрокоптеров (вот нашел видео на тему). По идее я мог поменять направления, но не стал. Снимая пропеллеры я чуть не погнул моторы или даже не выломал их из рамы, крайне неприятно.
В итоге получился такой красавчик:
Телеметрия
Для полноты ощущений самолет можно оборудовать телеметрией. Телеметрия выводит поверх изображения информацию о вашей скорости, высоте, удаления от базы, горизонт и т.п. Многие комплекты телеметрии оборудованы автопилотом, который может в случае потери радиосигнала вернуть самолет на базу. Советовать какую именно телеметрию брать я не буду, все хороши. Есть даже чисто русская разработка от
. Я, например, свою паял, может как-нибудь напишу про это статью.
Заключение
По началу мир вупов мне казался странным, но со временем я понял зачем люди покупают себе такие мелкие квадрокоптеры. Они компактней, можно летать на большем количестве локаций, а по ощущениями практически то же самое, только даже пролет под лавочкой воспринимается как крутое препятствие.
В статье нет информации про выбор очков и аппаратуры, про это можно почитать в моем прошлом посте или спрашивайте в комментариях.
Если вы полный новичок, то лучше будет купить готовый набор. А потом уже задумываться о собственном выборе каждой отдельно взятой детали.
FPV Квадрокоптер: Фильтрация в BetaflightОт земли к FPV Квадрокоптеру: Введение
Второй полет на новеньком вупе:





 купить по привлекательной цене 46990 руб. в Москве")