

- Что такое сервопривод (сервомотор) и как им управлять
- Преимущества электронного сервопривода для промышленных швейных машин
- Сервопривод отопления
- Трехконтурная структура управления
- Устройство и работа
- Шаговый режим vs подчиненное регулирование: практика
- Шаговый режим vs подчиненное регулирование: сравнение в статическом режиме
Что такое сервопривод (сервомотор) и как им управлять
Сервоприводы используются в самых разных областях, например, в робототехнике они помогают моделировать различные движения роботов. Сервоприводы – эффективное решение для перемещения механизмов в пространстве.
Устройство сервопривода
Если говорить об основных элементах сервопривода, то он состоит из блока управления, мотора и датчика.
Управление происходит через печатную плату, к которой подключен мотор постоянного тока и потенциометр (датчик). Внутри блока управления также находятся шестерни редуктора.
Фактически сам привод представляет собой электрический мотор с редуктором, именно электромотор преобразует электричество в механическое действие. Но скорость вращения мотора не всегда подходит для достижения поставленных целей. Чтобы было возможно управлять вращением мотора, используется редуктор. В итоге он понижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует получаемый на выходе результат.
Также из сервопривода выходят три провода. Два из них питают мотор, третий провод используется для подачи сигнала, который несет в себе заданное значение.
Принцип работы
При включении электромотора запускается вращение выходного вала. К нему можно подключить или присоединить то, чем в дальнейшем планируется управлять.
Сервопривод получает заданное значение, после этого сравнивает данное значение со значением на своем датчике. В случае расхождения блок управления стремится достичь и поддержать заданное значение, чтобы оно по возможности совпадало со значением, которое поступает с датчика.
Основные технические характеристики сервопривода
Крутящий момент (Усилие на валу). Измеряется в кг/см. Представляет собой произведение силы на длину рычага. На практике крутящий момент отвечает за ускорение выходного вала и его способность преодолевать сопротивление вращению. Чем выше крутящий момент, тем больше возможностей у мотора реализовать свой потенциал.
Скорость поворота. Означает скорость, с которой выходной вал сервопривода меняет свое положение. Угол изменения положения указывается в градусах.
Угол поворота. Это максимальный угол, на который может повернуться выходной вал. Наиболее распространенные значения для этой характеристики: 180° и 360°.
Габариты сервопривода. Сервоприводы бывают маленькие, стандартные и большие. Стандартные сервоприводы самые недорогие. При отклонении габаритов от стандартных значений цена, как правило, меняется пропорционально такому отклонению.
Материал шестерней. Шестерни редуктора производятся из пластика, карбона, металла. Пластиковые шестерни легкие, но не предназначены для серьезных нагрузок. Карбоновые шестерни более прочные, но и более дорогие. Металлические шестерни – самые тяжелые, идеально подходят для максимальных нагрузок.
Виды сервоприводов
Сервоприводы бывают цифровые и аналоговые.
По внешнему виду они почти не отличаются друг от друга. Основное отличие заключается в принципе управления мотором. У аналоговых сервоприводов управление происходит с помощью специальной микросхемы, цифровые сервоприводы обладают микропроцессором. Микросхема и микропроцессор способны принимать и анализировать управляющие импульсы. Только на микросхему они обычно поступают с частотой 50 Гц, а на микропроцессор – с частотой 200 Гц и более. В результате этого цифровой сервопривод мобильнее и четче реагирует на управляющий сигнал.
Цифровые сервоприводы – это новый шаг в развитии техники, и они характеризуются рядом преимуществ. К таким преимуществам относятся: высокая точность позиционирования, возможность более быстрого управления приводом, возможность поддержания постоянного крутящего момента.
Подключение к Arduino
Для достижения самых разных целей робототехники к программируемому контроллеру Arduino может быть подключен сервопривод. Подключение осуществляется через кабели, которые выходят из сервопривода. Обычно это три кабеля: красный; коричневый или черный; желтый, оранжевый или белый.
Красный кабель отвечает за питание сервопривода. Коричневый – за заземление. Желтый – подключается непосредственно к плате Arduino и предназначен для передачи управляющего сигнала.
Подключение сервопривода к плате Arduino производится через ШИМ-выводы.
Итак, черный провод подключается к любому GND-пину.
Красный кабель питания (VTG) – к соответствующему выводу для подключения питания.
Белый сигнальный кабель – к ШИМ-выводу.
Питание сервоприводов
Большинство плат Arduino рассчитано на 500 мА. Исходя из этого, сервопривод является достаточно энергоемким компонентом, так как потребляет более 100 мА. Если в ходе проекта требуется использование мощного сервопривода или нескольких сервоприводов, то необходимо позаботиться об их дополнительном питании. Проблема дополнительного питания сервоприводов может быть решена следующим образом:
• Обеспечить питание сервопривода от дополнительно приобретенного блока питания, например, 5 или 6 В;
• При отсутствии блока питания с нужным напряжением, можно использовать стабилизатор.
Напрямую к Arduino можно подключать только маломощный сервопривод. В противном случае пользователя ожидают разные побочные эффекты: от перезагрузки платы до перегорания отдельных компонентов.
Количество сервоприводов
Количество подключаемых к плате Arduino сервоприводов ограничено. Большинство моделей Arduino предусматривает подключение 12 сервоприводов, Arduino Mega позволяет подключить до 48 сервоприводов.
Управление сервоприводом
Библиотека Servo
Библиотека для сервопривода содержит в себе набор дополнительных команд, которые позволяют вводить программу в упрощенном виде.
На платах Arduino за исключением модели Arduino Mega обращение к библиотеке отключает функцию analogWrite(PWM) на пинах 9 и 10. Наличие подключения сервопривода или отсутствие такового при этом роли не играет. На платах Arduino Mega можно подключить до 12 сервомоторов без отключения функции PWM.
Для управления сервоприводом предусмотрена библиотека Servo.h.
Вызывается она через #include <Servo.h>. После подключения библиотеки становится возможным пользоваться списком, содержащихся в ней функций. С функциями библиотеки можно ознакомиться через меню «Файл/примеры». Для каждого сервопривода создается свой «объект» (servo), который прикрепляется к соответствующему цифровому пину. После этого программируемый контроллер Arduino готов отправлять управляющие сигналы на конкретный сервопривод. Передача сигналов производится постоянно, даже при «простое» сервопривода. Для приостановки передачи сигналов нужно отправить команду вручную.
Управляющий сигнал
Для управления сервоприводом управляющий сигнал приобретает решающее значение. Он представляет собой импульс, который имеет нужную ширину и посылается с соответствующей частотой. Ширину импульса можно вбивать в программном коде вручную, методом подбора достигнув точного угла, или использовать команды библиотеки, указывая нужный угол в градусах. У разных марок сервоприводов ширина импульса для поворота выходного вала на определенный угол может быть различна.
Импульсы отвечают как за движение сервопривода, так и за его неподвижное положение. Работа сервопривода происходит в замкнутом цикличном кругу посылаемых импульсов.
Управляющие команды
Управление сервоприводом через библиотеку основано на следующих командах:
• attach() — позволяет подключить определенный сервопривод к соответствующему пину;
• write() — на пин поступают значения для управления им;
• writeMicroseconds() — позволяет управлять сервоприводом путем передачи на него значений в микросекундах;
• read() — считывает значение текущего положения сервопривода;
• attached() — контролирует подключение сервопривода к пину;
• detach() — отключает сервопривод от конкретного пина.
Возможные сложности
Если в работе сервопривода возникают нарушения, то, как правило, об этом говорят соответствующие шумы: жужжание, потрескивание и прочее. Ниже рассмотрим основные причины таких шумов.
Невозможность поворота на заданный угол
Бывают случаи, когда поворот сервопривода на заданный угол невозможен. Например, на его пути возникает какая-либо преграда. Этой преградой может стать закрепленное на сервоприводе устройство или его часть. Упираясь в преграду, сервопривод начинает характерно жужжать. Чтобы решить данную проблему, в программу вносятся команды, ограничивающие перемещение сервопривода путем изменения угла перемещения.
Настройки начальной и конечной позиции
Иногда необходимо подкорректировать координаты начальной или конечной позиции. Это нужно когда значения датчика и фактического положения выходного вала расходятся относительно конечной позиции последнего. Например, выходной вал находится в конечной позиции, но датчик считает, что он еще ее не достиг и пытается заставить выходной вал продолжить движение. Возникает характерный шум. В этом случае начальная позиция не обязательно должна начинаться с 0°С, а конечная не обязательно должна заканчиваться на 180°C. Эти предельные значения можно немного сдвинуть на 5-10°C, и проблема будет решена.
Заключение
На сегодняшний день сервопривод – это необходимый элемент в робототехнике, с помощью которого воплощаются многие творческие проекты. Этот умный управляемый моторчик предназначен для моделирования движения. Пользоваться его функциями достаточно просто, уже написано множество программ, которые могут быть использованы в качестве трафарета для воплощения собственных идей. Сервопривод подключается к программируемому контроллеру Arduino. Все тонкости этого процесса подробно освещены как в этой статье, так и в других статьях, выложенных в сети.
Современные магазины предлагают большой выбор сервоприводов. Зная нужные характеристики, легко подобрать подходящую модель.
Преимущества электронного сервопривода для промышленных швейных машин
Для начала необходимо пояснить – что такое сервопривод/электронный привод для швейных машин? Каковы его отличия от обычного муфтового асинхронного мотора.
В сервоприводе отсутствует муфта сцепления, которая дает возможность отказаться от регулировок сцепления тормозной муфты, а также от периодической замены фрикционных накладок.
Как улучшаются характеристики машины, укомплектованной сервоприводом?
- Сервопривод, как правило, имеет более малый вес по сравнению с обычным мотором старого образца, что дает преимущества при монтаже и перевозке.
- Сервопривод позволяет экономить электроэнергию, что немаловажно в наше время, когда постоянно растут тарифы. Подсчитано, что на швейном предприятии, имеющем 100 промышленных швейных машин, снабженных сервоприводами, за год электроэнергии экономится на 250 000 рублей.
- Сервоприводы для промышленных швейных машин менее подлежат износу, механически сервопривод более долговечный, так как вся механика сводится всего лишь к двум подшипникам и двигатель начинает работу только тогда, когда оператор нажимает на педаль, то есть сервопривод меньше изнашивается, что впоследствии снижает затраты на ремонт. Такой же принцип работы двигателя бытовой швейной машины.
- Сервопривод не шумит так, как шумит традиционный асинхронный мотор. Шум сервомотора аналогичен шуму бытовой швейной машины.
Сервопривод может быть встроен в головку швейной промышленной машины или оверлока, а может быть отдельной единицей. В качестве отдельной единицы сервопривод более рационален. Почему? Потому что существует множество сервоприводов с разными характеристиками. При подборе швейного оборудования Вы можете выбрать характеристики именно такие, какие нужны Вам.
Если же сервопривод встроен в головку швейной промышленной машины, то приходится соглашаться с тем, что есть. В случае выхода из строя только сервопривода, вы будете ремонтировать только сервопривод, а не моноблок (головка швейной промышленной машины встроенный привод).
Встроенный сервопривод в головку оверлока
Встроенный сервопривод
Встроенный сервопривод в головку прямострочной машины
Подвесной сервопривод
Сервопривод для промышленной швейной машины может быть с позиционером или без без позиционера.
Для чего нужен позиционер?
Позиционер необходим для установки положения иглы в крайнем верхнем или в крайнем нижнем положении. Остановка иглы в нижнем положении, например, удобна при работе по контуру, при обработке мелких деталей: воротников, манжет, поясов; при обработке меховых изделий.
Верхнее положение – универсальное, оно позволяет отвлечься и не акцентировать внимание при старте машины на положении иглы и не позиционировать иглу при остановке. Верхнее положение также удобно тем, что при старте гарантировано, что верхняя нитка не выскользнет из иглы и Вам ее не придется заново вдевать в иглу.
Сервоприводы для промышленного швейного оборудования различаются по мощности. Мощность асинхронного электропривода 370 вт, мощность сервоприводов начинается от 550, 600 и 750 вт – для тяжелого оборудования.
Сервопривод отопления
По сравнению с механической регулировкой системы отопления, электрические сервоприводы являются наиболее совершенными и прогрессивными техническими устройствами, обеспечивающими поддержание параметров отопления помещений.
1 — Блок питания
2 — Комнатные термостаты
3 — Коммутационный блок
4 — Серводвигатели
5 — Подающий коллектор
6 — Обход
7 — Водяной теплый пол
8 — Обратный коллектор
9 — Датчик температуры воды
10 — Циркулярный насос
11 — Шаровый клапан
12 — Регулировочный клапан
13 — Двухходовой термостатический клапан
Привод системы отопления функционирует совместно с термостатом, установленным на стену. Кран с электрическим приводом монтируется на трубе подачи теплоносителя, перед коллектором теплого водяного пола. Далее выполняется подключение питания 220 вольт и настройка терморегулятора рабочего режима.
Система управления оснащается двумя датчиками. Один из них расположен в полу, другой в помещении. Датчики передают сигналы на термостат, управляющий сервоприводом, который соединен с краном. Повысить точность регулировки можно путем установки дополнительного прибора снаружи помещения, так как условия климата непрерывно изменяются, и оказывают влияние на температуру в комнате.
Привод механически соединен с клапаном для его управления. Клапаны могут быть двух- и трехходовыми. Двухходовой клапан может изменять температуру воды в системе. Трехходовой клапан способен поддерживать температуру неизменной, однако изменяет потребление горячей воды, которая подается в контуры.
Смешивание воды происходит с помощью клапана. При этом осуществляется регулировка подачи теплоносителя в коллекторы. При открывании одного входа, другой начинает закрываться, а расход воды на выходе не изменяется.
Трехконтурная структура управления
Система управления стремится поддерживать заданное положение вала ротора. Я вношу возмущающее воздействие, отвожу ротор от заданного положения, но после отпускания вала он снова вмиг возвращается к заданию. Даже если его «закрутить» на несколько оборотов, система управления открутит эти несколько оборотов назад, причем с очень хорошей динамикой — такой, что движение даже не успевает попасть в кадры видео.
На заднем фоне виден график работы привода: красным показан ток двигателя (пропорционален моменту), зеленым отображается текущее положение вала ротора, а желтым – задание положения. Максимальный разрешенный момент (ток) у двигателя в этом эксперименте был ограничен в три раза от максимального, на полном я бы не смог его так легко удерживать.
Как работает такая система управления? Это классическая трехконтурная система подчиненного регулирования с последовательной коррекцией, показанная на рис.1.
Рисунок 1. Трехконтурная система подчиненного регулирования
Почему подчиненного? Потому что каждый вложенный контур «подчиняется» заданию вышестоящего. В системе три контура, перечисляю начиная с внутреннего: конур тока (момента), контур скорости (частоты вращения), контур положения. Соответственно, каждый контур с помощью своего регулятора поддерживает на заданном уровне свою величину.
Почему именно три контура и именно таких? Попробую объяснить, как обычно, «на пальцах». Если мы хотим регулировать положение, то лучшее, чем мы можем для этого управлять – это скорость (частота вращения), потому что именно скорость напрямую влияет на изменение положения (скорость – это производная от положения), а все остальные величины (ток, напряжение и прочее) влияют на положение более сложным образом, более трудным для регулирования.
Далее, если мы теперь хотим регулировать скорость, то лучшее, чем можем управлять – это момент двигателя, так как момент определяет ускорение привода, и оно также самым простым математическим законом связано со скоростью. Так как для двигателя момент — это ток (для двигателя постоянного тока это справедливо в явном виде, а для двигателей переменного тока справедливо для моментообразующего тока в векторном управлении), то для регулирования момента нужно управлять напряжением на инверторе преобразователя, потому что ток и напряжение тоже связаны в первом приближении через простое дифференциальное уравление.
Если какой-либо внутренний контур опустить, то… положение регулироваться будет, но будет регулироваться плохо, не с таким быстродействием, как в трехконтурной системе. Если выкинуть, например, контур тока, заставив регулятор скорости воздействовать напрямую на напряжение инвертора, то останется бесконтрольным момент привода (ток) – он будет меняться как хочет, переходные процессы будут пущены на самотёк. К сожалению, некоторые ардуиноводы делают структуру, показанную на рис.2.
Рис.2. То, как не нужно регулировать положение привода.
Такая структура работает отвратительно (медленно и качается), хотя как-то работает – ПИ-регулятор всё вытянет.
Устройство и работа
От обычного электродвигателя сервопривод отличается тем, что можно задать точное положение вала в градусах. Сервоприводы – это любые механические приводы, которые включают в себя датчик некоторого параметра и блок управления, который способен автоматически поддерживать требуемые параметры, соответствующие определенным внешним значениям.
1 — Шестерни редуктора
2 — Выходной вал
3 — Подшипник
4 — Нижняя втулка
5 — Потенциометр
6 — Плата управления
7 — Винт корпуса
8 — Электродвигатель постоянного тока
9 — Шестерня электродвигателя
Для преобразования электрической энергии в механическое движение, необходим электродвигатель. Приводом является редуктор с электродвигателем. Редуктор требуется для снижения скорости двигателя, так как скорость слишком большая для применения. Редуктор состоит из корпуса, в котором расположены валы с шестернями, способными преобразовывать и передавать крутящий момент.
Путем запуска и останова электродвигателя можно приводить в движение выходной вал редуктора, который связан с шестерней сервопривода. К валу можно присоединять устройство или механизм, которым требуется управлять. Кроме этого для контроля положения вала требуется наличие датчика обратной связи. Этот датчик может преобразовать угол поворота снова в сигнал электрического тока.
Такой датчик получил название энкодера. В качестве энкодера может применяться потенциометр. Если бегунок потенциометра поворачивать, то будет изменяться его сопротивление. Значение этого сопротивления прямо пропорционально зависит от угла поворота потенциометра. Таким образом, есть возможность добиться установки определенного положения механизма.
Шаговый режим vs подчиненное регулирование: практика
А теперь давайте посмотрим на практике все вышесказанное. Нужно описать стенд, с которым я работаю. Технической информации много, спрячу это под спойлер.
Это отладочный комплект
VectorCARD К1921ВК01Т
, производимый нашей фирмой, который я утащил на выходные домой, чтобы снять красивые опыты и написать статью.
Рис. 5. Отладочный комплект для управления электродвигателем VectorCARD К1921ВК01Т
Серводвигатель – Leadshine ACM601V36-1000. Трехфазная синхронная машина с постоянными магнитами на 100Вт, 4 пары полюсов, напряжение питания 36В, номинальный ток 4А, пиковый 11А. Датчик положения – встроенный инкрементальный энкодер на 1000 периодов квадратурного сигнала (или, что то же самое, 4000 фронтов (меток) по двум каналам A и B суммарно).
Инвертор – шестиключевой инвертор на полевых транзисторах из комплекта DRV8301-HC-EVM Texas Instruments.
Контроллер – отладочная плата VectorCARD К1921ВК01Т на отечественном микроконтроллере К1921ВК01Т ОАО «НИИЭТ» (ARM Cortex-M4F, 100МГц).
Общая структура векторного трехконтурного подчиненного регулирования, создана программно, показана на рис. 6.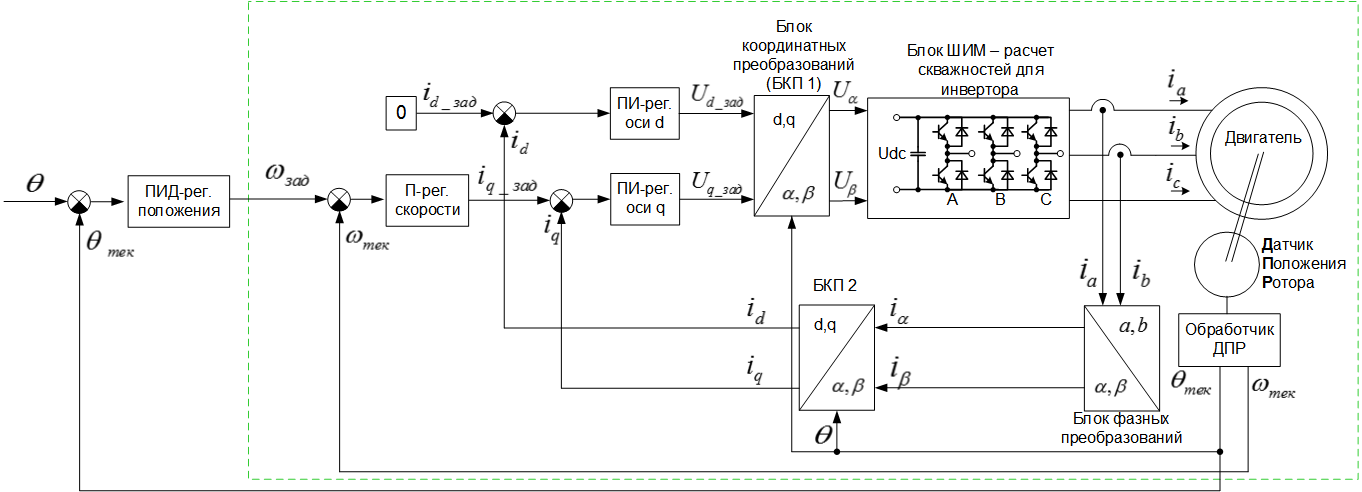
Рис. 6. Трехконтурная структура с векторным управлением синхронным двигателем: контура токов (момента), скорости, положения.
Если кому-то эта структура кажется страшной, то всё, что обведено в зеленую рамку было до основания разобрано в статье Векторное управление электродвигателем «на пальцах». По своему принципу структура ничем не отличается от структуры рис. 1.
Частота ШИМ задана равной 20кГц, частота обсчета структуры управления (всех трех контуров) – 10кГц. Датчики тока – шунтового типа, установлены последовательно с нижними ключами инвертора. Ресурсы микроконтроллера по производительности вычислений загружены чуть более, чем на половину.
Шаговый режим vs подчиненное регулирование: сравнение в статическом режиме
Сначала сравним шаговый режим работы и трехконтурную систему подчиненного регулирования с векторным управлением «в статике». Зададим одно и то же положение ротора, а затем будем плавно увеличивать момент нагрузки на валу. В шаговом режиме работы подадим номинальный ток 4А, а в векторном режиме работы поставим токоограничение 4А. Что мы ожидаем увидеть?
В шаговом режиме работы ток будет постоянным как по фазе, так и по амплитуде, а положение ротора должно «прогибаться» на магнитной пружине под нагрузкой. Так как число пар полюсов равно 4, то максимум момента должен достигаться при отклонении 360/4/4 = 22.5 механических градусов от первоначального согласованного положения.
Что будет в трехконтурной системе управления? Регулятор положения в этом опыте – ПИД (пропорционально – интегрально – дифференциальный). Ключевая буква здесь «И» – он имеет интегральную составляющую. Это значит, что до тех пор, пока между заданным положением и текущим есть хоть какое-то рассогласование, интегратор регулятора будет интегрировать и увеличивать свой выход, пока ошибка не придет в ноль.
Это значит, что если нагружать вал медленно, так, чтобы интегратор успел наинтегрировать и скомпенсировать ошибку (т.е. в статическом режиме), то вал будет стоять в одном и том же положении «мёртво». Но когда запас по току (моменту) привода будет исчерпан (задание на ток дойдет до ограничения 4А) привод сразу начнет поддаваться и отклоняться от задания (тем не менее, всё время будет тянуть с максимальным моментом по направлению к заданию).
Для отслеживания текущего положения вала ротора удобно наблюдать сигнал ошибки с датчика положения (разница между заданием и текущим положением), а также ток статора. При проведении опыта осциллограмма с этими данными будет видна на заднем фоне. Для наблюдения текущего момента нагрузки в опыте использован высокоточный специализированный динамометр, который я достал из ящика кухонного стола. Вот, собственно, сам опыт (чтобы было что-то видно — полный экран!):
Видео подтверждает сказанное. В векторной трехконтурной системе управления ротор стоял неподвижно, пока я не «выбрал» доступные 4А тока, а потом ротор стал отклоняться. В разомкнутой по положению структуре с постоянным током ротор легко поддался внешнему моменту. Так как число пар полюсов этого двигателя равно 4, то ротор отклонился более, чем на 20 градусов от задания.


