- Введение
- Основной процессор
- Airmode
- Вкладка blackbox
- Вкладка cli
- Вкладка configuration
- Вкладка failsafe
- Вкладка modes
- Вкладка motors
- Вкладка pid tuning
- Вкладка receiver
- Вкладка setup
- Главный процессор
- Дополнительные соображения
- Меню встроенное в betaflight osd
- Настраиваем режимы в betaflight
- Настраиваем тумблеры в пульте
- Настраиваем betaflight osd
- Настройка квадрокоптера с gps (inav).
- Настройка передатчика
- Настройка полетных режимов на flysky и turnigy
- Настройки в полетном контроллере
- Отдельно про permanently enable airmode.
- Питание
- Полетные контроллеры с поддержкой betaflight osd
- Пример
- Главный процессор
- Сенсоры
- Программное обеспечение
- Связь
- Дополнительные факторы
- Программное обеспечение
- Прошивка и настройка minimosd
- Прошивка и настройка регуляторов
- Прошивка полётного контроллера
- Прошивка полетного контроллера квадрокоптера с gps (inav).
- Разбор приемника и припаивание программатора
- Режимы полёта
- Связь
- Сенсоры
- Установка led подсветки на квадрокоптер.
Введение
Теперь, когда вы выбрали или спроектировали раму БПЛА, выбрали моторы, несущие винты, ESC и батарею, можно приступить к выбору полётного контроллера. Полётный контроллер для мультироторного беспилотного летательного аппарата представляет собой интегральную схему, обычно состоящую из микропроцессора, датчиков и входных/выходных контактов.
После распаковки контроллер полёта не знает какой конкретный тип или конфигурацию БПЛА вы используете, поэтому изначально необходимо будет установить определенные параметры в программном обеспечении, после чего заданная конфигурация загружается на борт.
Основной процессор
8051 vs AVR vs PIC vs ARM: Семейство микроконтроллеров составляющее основу большинства современных контроллеров полёта. Arduino основан на AVR (ATmel), и сообщество, похоже, сосредоточено на MultiWii, как на предпочтительном коде. Microchip является основным производителем чипов PIC. Трудно утверждать, что одно лучше другого, всё сводится к тому, что может делать программное обеспечение. ARM (например, STM32) использует 16/32-битную архитектуру, при этом десятки используют 8/16-битные AVR и PIC. Поскольку одноплатные компьютеры становятся все менее и менее дорогостоящими, ожидается появление полётных контроллеров нового поколения, которые могут работать с полноценными операционными системами, такими как Linux, или Android.
ЦП: Обычно их разрядность кратна 8 (8-бит, 16-бит, 32-бит, 64-бит), что в свою очередь указывает на размер первичных регистров в ЦП. Микропроцессоры могут обрабатывать только установленное (максимальное) количество бит в памяти за один раз (такт). Чем больше бит может обработать микропроцессор, тем более точной (и более быстрой) будет обработка. Например, обработка 16-битной переменной на 8-битном процессоре происходит куда медленней, чем на 32-битном. Обратите внимание, что код также должен работать с правильным количеством бит, а на момент написания этой статьи лишь немногие программы используют код, оптимизированный для 32 бит.
Рабочая частота: Частота, на которой работает основной процессор. Также по умолчанию её называют «тактовой частотой». Частота измеряется в герцах (циклов в секунду). Чем выше рабочая частота, тем быстрее процессор может обрабатывать данные.
Программная память/Флэш: Флэш-память — это место, где хранится основной код. Если программа сложная, она может занимать много места. Очевидно, что чем больше память, тем больше информации она может хранить. Память также актуальна при хранении данных в полёте, таких как координаты GPS, планы полёта, автоматическое движение камеры и т.д. Код, загруженный на флэш-память, остается на чипе даже после отключения питания.
SRAM: SRAM расшифровывается как «Статическая память с произвольным доступом» и представляет собой пространство на чипе, которое задействуется при выполнении расчетов. Данные, хранящиеся в оперативной памяти, теряются при отключении питания. Чем выше объём оперативной памяти, тем больше информации будет «легко доступно» для расчетов в любой момент времени.
EEPROM: электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) обычно используется для хранения информации, которая не изменяется во время полёта, например настройки, в отличие от данных, хранящихся на SRAM, к которым могут относиться показания датчика и т.д.
Дополнительные порты Ввода/Вывода: большинство микроконтроллеров имеют большое количество цифровых и аналоговых портов ввода и вывода, на контроллере полёта некоторые используются под датчики, другие для связи, либо для общего ввода и вывода. К этим дополнительным портам могут быть подключены RC сервоприводы, системы подвеса, зуммеры и многое другое.
Аналого-цифровой преобразователь (A/D converter/АЦП): Если датчики используют бортовое аналоговое напряжение (обычно 0-3.3В или 0-5В), аналого-цифровой преобразователь должен преобразовать эти показания в цифровые данные. Как и в случае с процессором, количество бит, которое может быть обработано АЦП, предопределяет максимальную точность. С этим связана тактовая частота, с которой микропроцессор может считывать данные (количество раз в секунду), чтобы убедиться, что информация не потеряна. Тем не менее, трудно не потерять часть данных во время такого преобразования, поэтому чем выше разрядность АЦП, тем более точными будут показания, но при этом важно, чтобы процессор смог справиться с той скоростью, с которой отправляются данные.
Airmode
Airmode — это не полетный режим, это функция, которая улучшает управляемость коптера при нулевом газе. Но её использование может привести к неожиданным ускорениям моторов, когда коптер стоит на земле, так что будьте осторожны.
Этот режим действительно доступен ещё и как фича/функция, так что если её включить на вкладке Configuration, то она исчезнет со вкладки Modes. Преимущество использования вкладки Modes в том, что вы сможете включить/выключить Airmode прямо в полете.
Вкладка blackbox
Blackbox — это «чёрный ящик» квадрокоптера. Нужен для диагностики, более точной настройки PID, а также чтобы можно было наложить инфографику на полётное видео (как
). Данные пишутся на внешний логгер или, если того позволяет объём памяти, на внутреннюю память ПК. Например, у Naze32 Acro её недостаточно, а у Naze32 Deluxe и SPRacingF3 Acro — хватает, хотя и не намного. При настройках по умолчанию, на 2Мб памяти можно записать данные полёта продолжительностью 3-4 минуты, что весьма мало.
Усугубляет ситуацию то, что реализовать запись «по кругу», как в автомобильных регистраторах, здесь невозможно из-за низкой скорости чтения/записи памяти. Единственный вариант — уменьшить в несколько раз скорость записи. Для диагностики такие данные уже будут малопригодны, а для видео — самое то. В этой вкладке я сделал следующее:
Как я уже писал выше, логгирование запускается тем же тумблером на аппаратуре, что и арминг, чтобы запись начиналась при старте моторов. Подробнее о работе и настройках Blackbox можно почитать в мануале. Также несколько полезных ссылок по теме:
Вкладка cli
CLI — это консоль, через которую можно менять уже более продвинутые настройки, а также делать резервную копию всех настроек. Я сделал следующее:
set small_angle = 180 # Включить возможность армить моторы даже в перевёрнутом состоянииset vbat_pid_compensation = ON # Включить компенсацию PID при разрядке батареиsave # Сохранить настройки
Также в Betaflight есть очень полезная возможность подключения к OSD через ПК. Теперь можно запрятать эту платку подальше, не беспокоясь, что к ней может понадобиться подключиться. Для подключения к плате OSD через ПК необходимо подключить батарею к квадрокоптеру, затем набрать в CLI команду serialpassthrough с необходимыми параметрами, затем отключить (Disconnect)
serialpassthrough 1 115200
На этом настройка полётного контроллера закончена.
Вкладка configuration
- Раздел ESC/Motor Features
Протокол регуляторов скорости (регуляторов оборотов) — посмотрите на характеристики вашего оборудования, какие протоколы оно поддерживает. Рекомендуется использовать DShot. Обычно регуляторы с прошивкой BLHeli_S поддерживают DShot300 или DShot600, а с прошивкой BLHeli_32 — даже DShot1200.
Дополнительная информация: протоколы и прошивки для регуляторов скорости.
Рекомендую отключить параметр «MOTOR_STOP«, иначе вы не сможете определить армлен коптер или нет.
Остальные параметры можно не трогать и оставить значения по умолчанию.
2. Раздел System Configuration
Looptime — время цикла, с этой частотой полетный контроллер рассчитывает полетные параметры, значение зависит от возможностей процессора, на шумных коптерах я предпочитаю использовать довольно низкую частоту 2 кГц, а на качественных коптерах — частоту повыше — 8 кГц. В любом случае, для начала подойдет и 2 кГц.
Gyro Sampling Rate — частота опроса гироскопов, обычно совпадает с looptime, хотя некоторые предпочитают поставить удвоенную частоту looptime. Можете поставить 4 кГц и looptime 2 кГц.
Потом поэкспериментируете и выберете наиболее подходящие значения, жестких правил по их выбору нет.
При смене значений этих параметров обратите внимание на CPU load (загрузка процессора) внизу экрана, старайтесь держать это значение меньше 30%. Если значение будет выше, то полетный контроллер может работать нестабильно.
Accelerometer — можно отключить, это высвободит немного процессорных ресурсов, но тогда вы не сможете использовать режимы Angle и Horizon, а 3Д модель на вкладке Setup перестанет двигаться. Еще одна причина по которой отключают эту функцию — чтобы избежать проблем при арминге коптера, если он сильно наклонен.
Отключите Barometer и Magnetometer, они нам не нужны, т.к. мы летаем на миникоптере.
3. Раздел Personalization
Craft name — название коптера, это значение будет отображаться на экране при помощи Betaflight OSD.
4. Раздел Receiver
Если у вас приемник SBUS, IBUS или Spektrum Satellite, тогда выбирайте «Serial-based receiver» в выпадающем списке «Receiver Mode». В параметре Serial Receiver Provider нужно выбрать SBUS, т.к. у нас приемник FrSky.
Если приемник использует PPM, тогда выберите PPM RX Input в списке Receiver Mode.
5. Раздел Other Features
Обычно я включаю нижеуказанные функции Betaflight. Если вы не уверены в том, нужны ли они, просто оставьте значения по умолчанию, они не помешают первому полету.
- Anti-Gravity
- Dynamic Filter
- Telemetry (чтобы работала SmartPort телеметрия)
- OSD (если ваш ПК поддерживает Betaflight OSD)
Нажмите Save & Reboot.
Вкладка failsafe
C failsafe всё оказалось несколько сложнее, чем мне виделось ранее. На профильных форумах иногда встречаются холивары на тему «где лучше настраивать failsafe: на приёмнике или на ПК?» На самом деле, правильно это вопрос звучит так: «где лучше настраивать failsafe: только на приёмнике или на приёмнике и на ПК?»
Настраивать failsafe на приёмнике необходимо в любом случае. Здесь надо сделать важное уточнение, что речь идёт о приёмнике Frsky D4R-II, работающем по протоколу PPM. У приёмников с S.Bus failsafe настраивается иначе.
У Frsky D4R-II есть три варианта поведения при потере сигнала от передатчика:
По умолчанию в Frsky D4R-II установлен режим Hold Last Position, который способствует улёту аппарата в далёкие дали. Так что если использовать failsafe только на приёмнике, надо настраивать режим Pre-set Positions. Другое дело, что failsafe активируется даже при кратковременной потере сигнала.
Будет очень неприятно, если сигнал через долю секунды восстановиться, а квадрокоптер уже задизармил моторы и падает вниз. Ситуацию может улучшить настройка failsafe на ПК, так как там этот режим имеет задержку срабатывания, что служит фильтром от кратковременных потерь сигнала.
Кроме того, там есть настраиваемый сценарий, согласно которому квадрокоптер будет себя вести в случае активации failsafe. Например, можно включить режим со стабилизацией и попытаться более-менее мягко сесть или вообще активизировать RTH, если он есть.
Нюанс в том, что, если на приёмнике установлен режим Pre-set Positions или Hold Last Position, то ПК даже не узнает, что произошла потеря сигнала. Таким образом, failsafe на ПК можно использовать лишь в том случае, если на приёмнике установлен режим No Pulse. На Frsky D4R-II он устанавливается кратковременным (менее 1 сек) нажатием на кнопку failsafe
при выключенном передатчике
На вкладке Failsafe Betaflight Configurator`а я сделал следующее:
Вкладка modes
Повесил на переключатели арминг моторов и Blackbox (AUX1), активацию полётного режима Horizon (AUX2) и включение пищалки (AUX3).
Отдельно хочется сказать про AIRMODE. Изначально он был уникальной «фишкой» Betaflight, но в какой-то момент стал так популярен, что Boris B поделился им с авторами Cleanflight и сейчас данный режим доступен и там тоже.
Несмотря на то, что AIRMODE отображается как отдельный режим полёта — это скорее дополнительная опция, а не полноценный режим. Он позволяет квадрокоптеру удерживать заданный угол даже при минимальном газе. Именно поэтому не рекомендуется использовать AIRMODE вместе с режимами со стабилизацией.
Кроме того, приземление с AIRMODE тоже процесс непростой: квадрокоптер начинает прыгать, как лягушка. Опытные пилоты предпочитают просто «ронять» квадрокоптер, выключая моторы в паре десятков сантиметров над землёй. Кстати, если у вас включена остановка моторов при нулевом газе (опция MOTOR_STOP во вкладке Configuration) и одновременно с этим работает AIRMODE, то остановки моторов не будет, так как AIRMODE имеет более высокий приоритет.
В Betaflight версии 2.8.1 появилась новая возможность: можно включить AIRMODE в фоновом режиме (что-то вроде пассивного перка в играх) и тогда он активен всегда и не будет отображаться во вкладке Modes, либо, как и ранее, повесить его включение на какой-либо канал. Делается это в «Other Features» вкладки Configuration.
У себя я не стал включать AIRMODE в фоновом режиме, так как использую ещё режим со стабилизацией HORIZON. Таким образом, у меня на AUX1 два полётных режима: HORIZON (для полётов со стабилизацией и посадки) и ACRO AIRMODE.
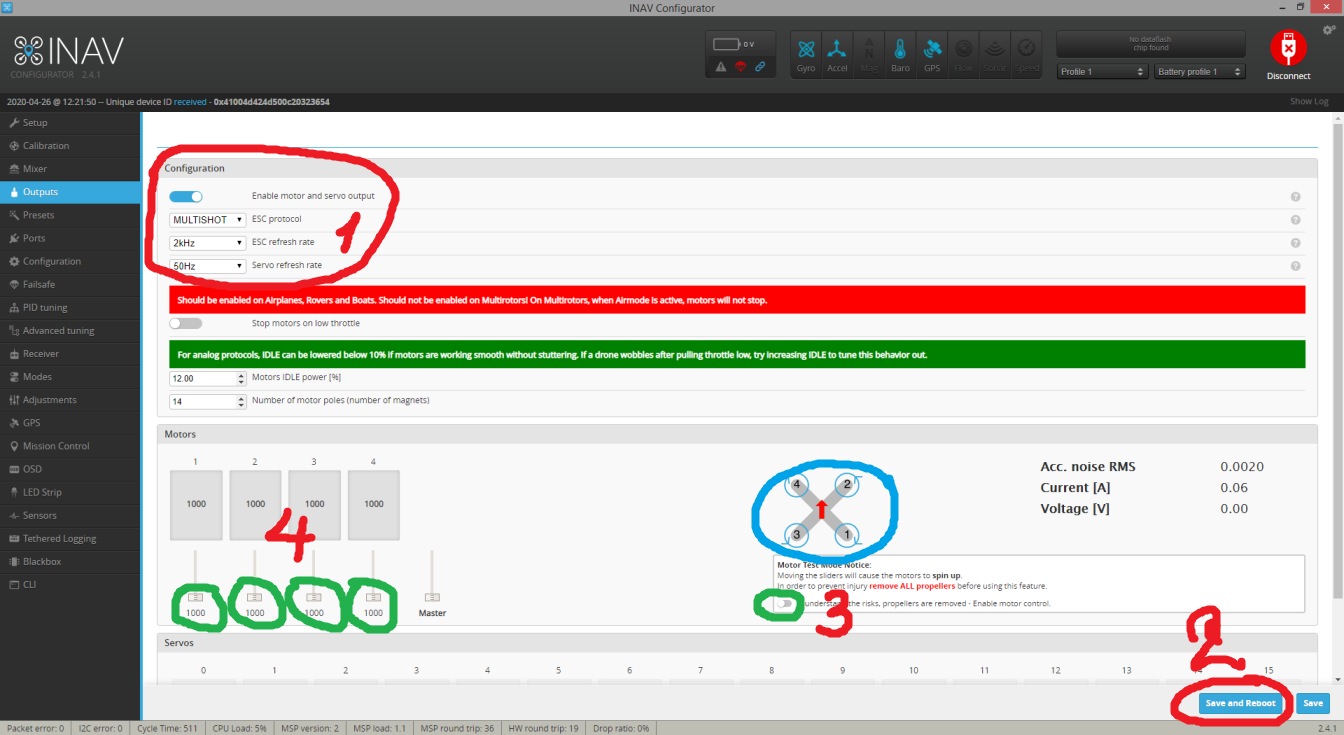
Вкладка motors
Проверим порядок моторов:
- мотор 1 — сзади справа
- мотор 2 — спереди справа
- мотор 3 — сзади слева
- мотор 4 — спереди слева
Если у вас другой порядок моторов, тогда его нужно поменять при помощи переназначения ресурсов (Resource Remapping).
Подробная инструкция по переназначению ресурсов
Теперь проверьте направление вращения моторов, его можно поменять в BLHeliSuite.
Инструкция: подключаем BLHeliSuite (конфигуратор для регуляторов скорости) через полетный контроллер
Вкладка pid tuning
Для первого полета здесь ничего менять не нужно. Но настройка ПИД коэффициентов и рейтов может помочь летать лучше.
ПИД — это по сути 3 коэффициента для каждой оси: крен (roll), тангаж (pitch) и рысканье (yaw). Настройка этих коэффициентов подразумевает, что вы понимаете, как они влияют на летные характеристики.
Вот моё руководство по настройке ПИД (англ).
Rate, Super Rate и Expo — определяют то, как резко коптер будет реагировать на движение стиков.
Руководство по настройке Rate, Super Rate и Expo
Вкладка receiver
Тут мы проверяем, что приемник работает правильно.
Включаем аппаратуру управления и приемник, двигаем стики по одному и наблюдаем как меняются значения в соответствующих каналах. Если меняются не те каналы, тогда нужно поменять их порядок в параметре «Channel Map«.
Если ни один из каналов не работает, тогда начинаем искать проблему:
- приемник привязан к передатчику (забинден)? На приемнике должен гореть зеленый светодиод
- приемник правильно подключен/припаян к полетному контроллеру?
- уверены, что Serial RX включили на нужном порту?
- уверены, что правильно выбрали протокол?
После того как убедитесь, что все каналы работают правильно, проверьте значения в средних и крайних точках в первых четырех каналах (Pitch, Roll, Yaw, Throttle, т.е. тангаж, крен, рысканье и газ). В центральном положении эти каналы должны иметь значение 1500, а крайние значения 1000 и 2000.
Если у вас другие значения, тогда читайте вот это руководство по настройке центральных и конечных точек.
Вкладка setup
Вы должны увидеть вкладку Setup сразу, как только подключитесь к полетному контроллеру.
- Прежде чем менять настройки, сделайте резервную копию.
- Поставьте коптер на ровную горизонтальную поверхность, и откалибруйте акселерометры (см. картинку).
- Покрутите коптер в руках, 3Д модель должна вращаться так же, как и коптер
Если 3Д модель не двигается или двигается не так как коптер, тогда скорее всего полетный контроллер установлен не той стороной (обычно на плате есть стрелка, которая должна указывать вперед). В этом случае можно повернуть плату на коптере или задать YAW offset на вкладке Configuration (обычно это углы 90, 180 или 270 градусов).
Главный процессор
Используемый на борту ATMel ATMega2560 является одним из наиболее мощных Arduino-совместимых чипов ATMel. Хотя он имеет в общей сложности 100 выводов, включая 16 аналогово-цифровых каналов и пять портов SPI, из-за его небольшого размера и предполагаемого использования в качестве контроллера полёта, на плате присутствуют только некоторые из них.
- AVR vs PIC: AVR
- Процессор: 8-бит
- Рабочая частота: 16МГц
- Программная память/Flash: 256Кбайт
- SRAM: 8Кбайт
- EEPROM: 4Кбайт
- Дополнительные контакты ввода/вывода: 3 × I2C; 1 × UART; 2 × 10-контактных GPIO; Серво с 5 × выходами; OLED порт
- Аналого-цифровой преобразователь: 10-бит
Дополнительные соображения
Функциональность: Производители полётных контроллеров, обычно, стараются предоставить как можно больше функций — либо включены по умолчанию, либо приобретаются отдельно в качестве опций/дополнений. Ниже приведены лишь некоторые из множества дополнительных функций, на которые вы, возможно, захотите взглянуть при сравнении контроллеров полёта.
Демпфирование: даже небольшие вибрации в раме, обычно вызываемые несбалансированными несущими винтами и/или моторами, могут быть выявлены встроенным акселерометром, который, в свою очередь, отправит соответствующие сигналы на главный процессор, который предпримет корректирующие действия. Эти незначительные исправления не нужны или не желательны для стабильного полёта, и лучше всего, чтобы контроллер полёта вибрировал как можно меньше. По этой причине между контроллером полёта и рамой часто используются виброгасители/демпферы.
Корпус: защитный корпус вокруг контроллера полёта может помочь в различных ситуациях. Помимо того, что корпус выглядит более эстетично, чем голая печатная плата, корпус часто обеспечивает некоторый уровень защиты элект. элементов, а также дополнительную защиту в случае краша.
Монтаж: Существуют различные способы установки контроллера полёта на раму, и не все контроллеры полёта имеют одинаковые варианты монтажа:
- Четыре отверстия на расстоянии 30.5мм или 45мм друг от друга в квадрате.
- Плоская нижняя часть для использования с наклейкой.
- Четыре отверстия в прямоугольнике (стандарт не установлен).
Сообщество: поскольку вы создаете кастомный дрон, участие в онлайн-сообществе может значительно помочь, особенно, если вы столкнулись с проблемами или хотите получить совет. Получение рекомендаций от сообщества или просмотр отзывов пользователей, касательно качества и простоты использования различных контроллеров полёта, может также быть полезным.
Аксессуары: Для полноценного использования продукта, помимо самого контроллера полёта, могут потребоваться сопутствующие элементы (аксессуары или опции). Такие аксессуары могут включать, но не ограничиваются ими: модуль GPS и/или GPS антенна; кабели; монтажные принадлежности; экран (LCD/OLED);
Меню встроенное в betaflight osd
Для включения меню нужно сдвинуть стики:
- Газ посередине
- Разворот влево (yaw left)
- Наклон вперед (pitch forward)
При работе в меню газ должен оставаться в центральном положении.
По меню можно передвигаться при помощи тангажа (pitch), крен (roll) для выбора параметра. Смена значений также при помощи крена (roll).
Меню позволяет изменить огромное число параметров, таких как: PID, PID profile, rate, rate profile, filter и т.д. С каждой новой версией меню становится все лучше и лучше, добавляются новые опции. Большинство пунктов меню не требует объяснений, конечно если вы знакомы с Betaflight GUI.
Однако не все параметры Betaflight можно поменять через OSD, некоторые можно менять только на компьютере, например, d_lowpass_type.
После того, как вы изменили необходимые параметры, убедитесь, что сохранили их вернувшись в главное меню и выбрав последний пукнт: «Save & Reboot».
Настраиваем режимы в betaflight
Настройка тумблеров — это была самая сложная часть, теперь осталось самое легкое.
Переходим на вкладку Modes в Betaflight Configurator.
Начнем с первого и самого важного — арминг (Arm). Нажимаем «Add Range» и выбираем AUX1 в выпадающем списке.
Нужно выбрать диапазон значений канала, при котором этот режим будет активен. Для двухпозиционного выключателя это 1500 — 2000. Для трехпозиционного я ставлю 1300 — 2000, так что в среднем и нижнем положениях коптер будет заармлен, как и показано на рисунке.
Для того, чтобы активировать Angle тем же тумблером, но в нижнем положении, нужно сделать так, как показано ниже:
Ну и в конце, настраиваем пищалку (beeper) на тумблер SG, который привязан к каналу AUX2.
Нажимаем «Save», на этом всё!
Настраиваем тумблеры в пульте
Режимы Betaflight можно активировать тумблерами на аппаратуре управления.
Вот руководство по настройке тумблеров в OpenTx (подойдет для Taranis X9D, QX7, Horus X10, Nirvana, X-Lite и т.д.). Если у вас другая аппаратура — придется погуглить руководство, их много.
В этом примере я буду использовать тумблер SD на канале AUX1 (канал 5), а SG на AUX2 (канал 6).
На Таранисе я предпочитаю использовать тумблер SD для арминга, а SG для пищалки. Ниже я покажу вам, как включить режим Angle с того же переключателя (SD), что и активирую коптер:
Настраиваем betaflight osd
Настройка Betaflight OSD очень простая, ниже приведена последовательность моих шагов.
В первую очередь убедитесь, что в полетный контроллер прошита последняя версия Betaflight (нормальная поддержка OSD появилась начиная с версии 3.1).
Т.к. OSD встроено в ПК, то просто подключите камеру и видео передатчик. Например, вот схема соединений с ПК DYS F4 Pro (предположим, что камера и видео передатчик питаются от 5 вольт).
Сигнал с камеры идет на контакт «Vin», а на видео передатчик сигнал выходит с контакта «Vout».
Подключаем ПК к компьютеру и запускаем Betaflight Chrome GUI; включаем OSD на закладке Configuration.
Теперь переходим на закладку OSD, на ней мы будем настраивать наше меню.
Интерфейс очень прост, просто выбираем параметры, которые мы хотим видеть на экране.
Video format — выбираем PAL или NTSC, в зависимости от камеры. Если не знаете формат, тогда оставляйте Auto, автоопределение работает очень хорошо. Но учтите. что превью в режиме Auto и PAL показывает одно и тоже, но если камера будет передавать NTSC сигнал, то нижняя часть данных обрежется (из-за размеров NTSC кадра).
В разделе «Alarms» можно установить предельные значения для RSSI (качество приема), Capacity (емкость аккумулятора), Minutes (полетное время) и Altitude (высота). Когда предельные значения будут достигнуты, соответствующие данные начнут мигать.
Вы можете перетаскивать данные по экрану предварительного просмотра (preview).
Мой список отображаемых параметров:
- Main battery voltage – напряжение питания
- Flytime – время с момента взлета
- Craft Name – название коптера
- Throttle Position — газ
- Current Draw – потребляемый ток
- Mah Drawn – использованная емкость аккумулятора
Настройка квадрокоптера с gps (inav).
Далее я опишу Вам самые основные настройки квадрокоптера (в основном скриншоты), которых будет достаточно для того, чтобы он без проблем полетел. На некоторых заострю ваше внимание. Чтобы наиболее полно изучить все настройки INAV рекомендую обратиться к документации на GitHub.
Ну вот мы прошили квадрокоптер, подключили к INAV Configurator. Первая вкладка, которую мы увидим — Setup и на ней будут видны два красных крестика, говорящие нам о том, что нужно откалибровать акселерометр и, в дальнейшем, компас.
Вообще блок Pre-arming checks на этой вкладке показывает все ли в порядке с подключениями и настройками. Если по какой-либо причине после всех настроек у вас квадрокоптер не будет Arm, то идите на эту вкладку и выясняйте причины.
Идем на вкладку Configuration и выбираем AUTO там, где указано. Здесь и далее после каждой операции не забываем сохранять и перезагружать.

Если вы все сделали правильно, то на вкладке Setup в блоке Pre-arming checks все будет зелёное.
Вкладка порты (инициализируем IBUS и GPS модуль).

к этой статье. В ней подробно описано как изменить направление вращения мотора в BLHeli Configurator.
 MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать. MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
Настройка передатчика
Передатчик (он же “пульт») каждый пилот настраивает индивидуально: таймеры, миксы, голосовые уведомления и прочее. Единственная вещь, сделать которую крайне желательно, это проверить минимальные, средние и максимальные значения стиков управления в конфигураторе.
Делается это во вкладке Reciever. Идеальные значения составляют 1000 — 1500 — 2000. В моём случае они составляли 996 — 1508 — 2020, что не очень хорошо. Во-первых, «выпадения» за пределы диапазона (значения менее 1000 и более 2000) плохи сами по себе.
Во-вторых, центральное положение, отличное от 1500, будет восприниматься ПК, как лёгкое подруливание, которое он будет отрабатывать и квадрокоптер постоянно будет сносить в какую-то сторону. Словом, имеет смысл повозиться и настроить «как надо».Как настроить эти значения на передатчике Taranis, показано здесь.
У меня Turnigy 9XR PRO, там это делается в пункте Limits. Также можно выполнить настройку через программу eePskye (вкладка Limits), но это неудобно, так как результат сразу не видно в Betaflight Configurator. Сделать это необходимо для каждого из четырёх каналов управления.
После настройки центральные значения максимально приблизились к 1500, но у меня они начали «прыгать» примерно на 5 единиц в одну или другую сторону. Не знаю, с чем это связано, вероятно, значения пульта являются пограничными для ПК и после их округления получается такой эффект.
set deadband = 6
Значение может быть от 0 до 32 и с его повышением чувствительность управления снижается. Управление становится более мягким. Надо понимать, что после определённого порога мягкость превратится в ватность, поэтому для себя я выбирал минимальное значение, при котором дёрганья исчезли.На этом всё, удачных полётов!
Настройка полетных режимов на flysky и turnigy
Как видите – настроить FlySky TH9X или Turnigy 9X просто, если знать как именно настраивается.
Еще один вариант настройки – теперь 6 полетных режимов.
Вторая аппаратура радиоуправления по распространенности, это Flysky FS-i6.
На видео выше – настройка пультов FlySky FS-i6 или Turnigy i6 для APM 2.6 / 2.8.
FlySky i6S отличается по настройкам от своего собрата, смотрите видео настройки ниже.
По сути – главное, это настройка уровня канала на аппаратуре радиоуправления. Корректировка значений для полетного контроллера квадрокоптера – дело вторичное и особых проблем не доставляет.
Настройки в полетном контроллере
Почти все. Теперь у вас есть приемник от FlySky, которого вы научили передавать RSSI, но еще не научили принимать такую информацию полетного контроллера.
Подсоедините приемник к полетному контроллеру. Подсоедините полетный контроллер к компьютеру и зайдите в конфигуратор (например, в Betaflight). На вкладке «Конфигурация» снимите флажок с «Analog RSSI», если он там стоит.
Теперь перейдите на вкладку «Приемник» и установите значение в «RSSI Channel» в зависимости от прошивки, которую вы скачали с репозитория. У меня это IA6B_rssi_ch8.bin, поэтому нужно выбрать «CH8».
Теперь у вас есть RSSI, поздравляю! Если оно не выведется на экране, зайдите на вкладку конфигуратора — OSD и настройте вывод в нужном месте экрана.
Если у вас пульт не прошит на 14 каналов, ничего страшного, так как значение RSSI создается самим передатчиком.
Отдельно про permanently enable airmode.
Хочу предостеречь вас от включения опции Permanently enable AIRMODE пока вы тестируете и настраиваете квадрокоптер дома. Эта опция, при установленных пропеллерах, может хорошенько потрепать вам нервы и даже испортить здоровье.
Если вдруг вы решите придержать руками квадрокоптер с включенной опцией при первых испытаниях, то столкнетесь с тем, что квадрокоптер бесконтрольно будет наращивать обороты моторов. Вплоть до максимальных значений, независимо от положения стика газа.
Обычно люди сразу думают, что это неполадки с полетным контроллером или передатчиком. Но на самом деле так работает эта функция. Пока квадрокоптер не сдвинется хотя бы на миллиметр для стабилизации, полетный контроллер будет увеличивать обороты. Имейте это ввиду. В поле можете включить ее снова.
Если вы сделали все вышеописанное, то настраиваете FailSafe, OSD и полетные режимы на свое усмотрение.
Часто случается, что клоны Omnibus показывают непонятные иероглифы в OSD. Попробуйте поменять шрифт, мне помогло.
Удачных полетов!
Питание
Часто в спецификации полётного контроллера описываются два диапазона напряжений, первый из которых представляет собой диапазон входного напряжения самого контроллера полёта (большинство работает при номинальном напряжении 5В), а второй — диапазон входного напряжения основного микропроцессора (3.3В или 5В).
Поскольку контроллер полёта является встраиваемым устройством, вам необходимо обратить внимание только на входящий диапазон напряжения контроллера. Большинство контроллеров полёта мультироторных БЛА работают при напряжении 5В, так как это напряжение вырабатывает BEC (для получения дополнительной информации см. раздел «Силовая установка»).
Повторим. В идеале не нужно запитывать контроллер полёта отдельно от основной батареи. Единственное исключение — если вам нужна резервная АКБ на случай, когда основная батарея отдаёт столько энергии, что BEC не может вырабатывать достаточно тока/ напряжения, вызывая тем самым отключение питания/сброс. Но, в таком случае вместо резервной батареи часто используют конденсаторы.
Полетные контроллеры с поддержкой betaflight osd
Не каждый полетный контроллер со встроенным OSD поддерживает Betaflight OSD, некоторые используют кастомные прошивки.
Однако, в настоящее время довольно много ПК с поддержкой Betaflight OSD: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 и Betaflight F3. В любом случае, поддержка Betaflight OSD должна быть четко указана в спецификациях.
Пример
Итак, учитывая все эти различные сравнительные характеристики, какую информацию вы можете получить о контроллере полёта и что может включать контроллер полета? В качестве примера мы выбрали Quadrino Nano Flight Controller.
Главный процессор
Используемый на борту ATMel ATMega2560 является одним из наиболее мощных Arduino-совместимых чипов ATMel. Хотя он имеет в общей сложности 100 выводов, включая 16 аналогово-цифровых каналов и пять портов SPI, из-за его небольшого размера и предполагаемого использования в качестве контроллера полёта, на плате присутствуют только некоторые из них.
- AVR vs PIC: AVR
- Процессор: 8-бит
- Рабочая частота: 16МГц
- Программная память/Flash: 256Кбайт
- SRAM: 8Кбайт
- EEPROM: 4Кбайт
- Дополнительные контакты ввода/вывода: 3 × I2C; 1 × UART; 2 × 10-контактных GPIO; Серво с 5 × выходами; OLED порт
- Аналого-цифровой преобразователь: 10-бит

Сенсоры
Quadrino Nano включает микросхему MPU9150 IMU, которая включает в себя 3-осевой гироскоп, 3-осевой акселерометр и 3-осевой магнитометр. Это помогает сделать плату достаточно маленькой, не жертвуя качеством датчика. Барометр MS5611 предоставляет данные о давлении и покрыт кусочком пены. Интегрированный Venus 838FLPx GPS с внешней GPS антенной (в комплекте).

Программное обеспечение
Quadrino Nano был создан специально для использования новейшего программного обеспечения MultiWii (на базе Arduino). Вместо того, чтобы изменять код Arduino напрямую, было создано отдельное, более графическое программное обеспечение.

Связь
- Прямой ввод от стандартного RC приёмника.
- Порт выделенного спутникового ресивера Spektrum
- Последовательный (SBus и/или Bluetooth или 3DR радиосвязи)

Дополнительные факторы
- Корпус: защитный полупрозрачный корпус входит в стандартную комплектацию
- Монтаж: Есть два основных способа крепления Quadrino Nano к дрону: винты и гайки или наклейка из вспененной резины.
- Компактная конструкция: сам контроллер (без учёта GPS антенны) имеет размеры 53 × 53мм.

Программное обеспечение
ПИД-регулятор (назначение и настройка)
Proportional Integral Derivate (PID) или Пропорционально-интегрально-дифференцирующий регулятор (ПИД) — часть программного обеспечения полётного контроллера, которое считывает данные с сенсоров и вычисляет, как быстро должны вращаться моторы, чтобы сохранить желаемую скорость перемещения БЛА.
Разработчики готовых к полёту БЛА как правило оптимально настраивают параметры ПИД-регулятора, поэтому большинство RTF беспилотников отлично пилотируются прямо из коробки. Чего не скажешь про кастомные сборки БЛА, где актуально использование универсального полётного контроллера подходящего для любой мультироторной сборки, с возможностью регулировки значений PID до тех пор, пока они не будут соответствовать требуемым характеристикам полёта конечного пользователя.

Прошивка и настройка minimosd
Наиболее популярной (но не единственной) прошивкой для MinimOSD является MWOSD. Сначала нужно прошить ей плату, а потом ещё и настроить. Если настроить OSD можно через ПК (подробнее об этом в разделе, посвящённом настройке ПК), то для прошивки необходим FTDI-адаптер или Ардуинка.
#define MINIMOSD#define CLEANFLIGHT
Из параметров выводить на экран я стал только напряжение батареи, время полёта и выбранный полётный режим.
Прошивка и настройка регуляторов
Для прошивки регуляторов у меня тоже есть специальный USB-адаптер, но можно обойтись и без него, подключившись через ПК. Долго думал, ставить Multishot или уже проверенный Oneshot125? С одной стороны, на устаревшем чипе F330 в скорости особой разницы не заметно, с другой — мелодия из «Звёздных войн» при включении и, как пишут на форумах, «более чистый сигнал».
Решили всё неединичные жалобы на то, что моторы стихийно начинают вращаться на максимальных оборотах при подключении к CLI. В итоге поставил BLHeli последней версии (на момент сборки 14.5), включил Damped Light и выставил Motor Timing на «Medium». Позднее откалибровал регуляторы по этой инструкции.
Прошивка полётного контроллера
На этом этапе я застрял дольше всего, так как были проблемы с прошивкой. Оказалось, первый раз шить надо обязательно с замыканием boot-контактов (как в этом видео). Кстати, иногда бывает, что ПК защищён от записи и невозможно прошить новую прошивку. Вот инструкция, как это исправить.
Пожалуй, самой популярной прошивкой на сегодняшний день, вполне заслуженно, является Cleanflight. После её установки достоточно только настроить протокол приёмника и квадрокоптер уже может вполне сносно лететь. Для настройки используется удобная графическая оболочка Cleanflight Configurator.
Благодаря открытому коду прошивки, у неё есть несколько ответвлений (форков). Самым интересным из них является Betaflight от человека под ником Boris B. Прошивка очень динамично развивается и некоторые её «фичи» потом переходят в «родительский» Cleanflight (например, полётный режим Airmode).
https://www.youtube.com/watch?v=JBowTPvu1qc
Минусом Betaflight является то, что релизы выходят достаточно часто, а стабильность их не всегда высока. Кстати, эта причина на несколько недель задержала написание данной статьи. На момент завершения сборки квадрокоптера как раз вышла версия 2.8.0, которая имела пару ошибок и отличалась недружелюбными дефолтными настройками.
Очень быстро появилась исправленная версия 2.8.1 RC1, но опыт работы программистом подсказал мне, что лучше подождать релиза. Я не прогадал, так как одновременно с релизом версии 2.8.1, появился и Betaflight Configurator. Можно сказать, что это новый этап в истории данной прошивки.
Дело в том, что по мере своего развития Betaflight всё больше и больше отдалялся от Cleanflight и конфигуратор последнего становился всё более и более бесполезным, так как основная часть настроек всё равно делалась через консоль CLI. Кстати, на момент подготовки этой статьи, уже вышла версия Betaflight под номером 2.9.
Прошивка полетного контроллера квадрокоптера с gps (inav).
Во-первых, клоны Omnibus чаще всего приходят к нам с предустановленной прошивкой BetaFlight. Нам с вами нужно залить в полетный контроллер прошивку INAV.
Для этого, а также для последующей настройки скачиваем Inav Configurator.
Далее скачиваем и устанавливаем все необходимые драйвера, и прошиваем наш полетный контроллер точно также, как в этой статье. Разница лишь в том, что работать вы будете в INAV Configurator вместо Betaflight. Они имеют очень схожий интерфейс. Для прошивки на момент написания статьи я выбрал следующие плату и версию прошивки
Разбор приемника и припаивание программатора
Вам нужно снять кейс, если у вас приемник в корпусе (например, i6b).
Затем, найдите контактные площадки:
На программаторе ST-Link V2 они обозначаются точно также. Вам нужно подключить колодки с проводами к программатору и следуя маркировке, припаять провода к приемнику.

И несколько распиновок других приемников:

Не перепутайте при подключении пины 5V и 3.3! В противном случае, приемник сгорит.
Также, не подключайте ST-link к компьютеру до установки драйверов!
Режимы полёта
Ниже приведён список самых популярных режимов полёта, тем не менее не все из них могут быть доступны в полётных контроллерах. «Режим полёта» — это способ, посредством которого полётный контроллер использует сенсоры и входящие радиокоманды для обеспечения стабилизации и полёта БПЛА.
- ACRO — обычно режим по умолчанию, из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп (беспилотник не может автоматически выравниваться). Актуален для спортивного (акробатического) полёта.
- ANGLE — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп и акселерометр. Углы ограничены. Будет удерживать беспилотник в горизонтальном положении (но без удержания позиции).
- HORIZON — сочетает в себе стабильность режима «ANGLE», когда стики находятся вблизи центра и перемещаются медленно, и акробатику режима «ACRO», когда стики находятся в крайних положениях и перемещаются быстро. Контроллером полёта задействуется только гироскоп.
- BARO (Altitude Hold) — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и барометр. Углы ограничены. Барометр используется для удержания определенной (фиксированной) высоты, когда с аппаратуры управления не подаются никакие команды.
- MAG (Heading Hold) — режим блокировки курса (направления компаса), беспилотник будет сохранять Yaw ориентацию. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- HEADFREE (CareFree, Headless, Безголовый) — исключает отслеживание ориентации (Yaw) дрона и тем самым позволяет перемещаться в 2D направлении согласно перемещению стика управления ROLL/PITCH. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- GPS/Return to Home — автоматически использует компас и GPS, чтобы вернуться к месту взлёта. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Waypoint — позволяет беспилотнику автономно следовать по предварительно установленным GPS точкам. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Position Hold — удерживает текущую позицию с помощью GPS и барометра (если доступен). Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- Failsafe (аварийный/отказоустойчивый режим) — если другие режимы полёта заданы не были, беспилотник переходит в режим Acro. Из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп. Актуален при сбоях в программном обеспечении беспилотника, позволяет восстановить контроль над БЛА посредством ранее предустановленных команд.
Связь
Радиоуправление (RC)
Управление посредством радиосвязи обычно включает в себя RC передатчик/RC transmitter (в беспилотном хобби — радиоаппаратура управления/пульт) и RC приёмник (RC receiver). Для взаимодействия с БПЛА пользователю потребуется как минимум четырёх (и более) канальный RC передатчик. По умолчанию первые четыре канала связаны с:

Все остальные имеющиеся каналы могут быть задействованы для таких действий как:
- Арминг (Arming или Arm)/Дизарминг (Disarming или Disarm) — постановка/снятие с охраны моторов.
- Управление подвесом (панорамирование вверх/вниз, вращение по часовой стрелке/против часовой стрелки, зуммирование)
- Смена режимов полёта (ACRO/ANGLE и т.д.)
- Активировать/Задействовать полезную нагрузку (парашют, зуммер или другое устройство)
- Любое другое применение

Большинство пользователей (пилотов БПЛА) предпочитают именно ручное управление, это ещё раз доказывает, что пилотирование при помощи аппаратуры управления по прежнему является выбором номер один. Сам по себе RC приёмник просто передаёт поступающие от RC передатчика значения, а значит не может управлять беспилотником. RC приёмник должен быть подключен к контроллеру полёта, который в свою очередь должен быть запрограммирован для приёма RC сигналов. На рынке очень мало полётных контроллеров, которые принимают входящие радиокоманды от приёмника на прямую, а большинство ПК даже обеспечивают питание приёмника от одного из контактных выводов. Дополнительные соображения при выборе пульта дистанционного управления включают в себя:
- Не все RC передатчики могут обеспечить полный диапазон RC сигналов от 500мс до 2500мс; некоторые искусственно ограничивают этот диапазон, так как большинство используемых RC предназначены для радиоуправляемых автомобилей, самолётов и вертолётов.
- Дальность/Макс. воздушный радиус действия (измеряется в футах или метрах) RC-системы — практически никогда не предоставляются производителями, поскольку на этот параметр влияют множество факторов, таких как помехи, температура, влажность, заряд батареи и другие.
- Некоторые RC-системы имеют приёмник, который также имеет встроенный передатчик для передачи данных от датчика (например, GPS-координат), которые в последствии будут отображаться на ЖК-дисплее RC передатчика.
Bluetooth
Bluetooth и более поздние продукты BLE (Bluetooth Low Energy) изначально предназначались для передачи данных между устройствами без заморочек сопряжения или согласования частот. Некоторые имеющиеся на рынке контроллеры полёта могут отправлять и получать данные по беспроводной связи через соединение Bluetooth, что упрощает поиск неисправностей в полевых условиях.

Wi-Fi
Управление по Wi-Fi обычно достигается посредством Wi-Fi роутера, компьютера (в том числе ноутбук, десктоп, планшет) или смартфон. Wi-Fi в состоянии справится как с передачей данных, так и с передачей видеопотока, но одновременно с этим эту технологию сложнее настроить/реализовать. Как и для всех Wi-Fi устройств, расстояние удаления ограничено Wi-Fi передатчиком.

Радиочастота (RF или РЧ)
Радиочастотное (РЧ) управление в этом контексте относится к беспроводной передаче данных с компьютера или микроконтроллера на летательный аппарат с использованием РЧ передатчика/Приёмника (или двухполосного приёмопередатчика). Использование обычного радиочастотного блока, подключенного к компьютеру, позволяет осуществлять двухполосную связь на большие расстояния с высокой «плотностью» данных (обычно в последовательном формате).
![]()
Смартфон
Хоть это и не тип связи, самого вопроса, как управлять дроном используя смартфон, достаточно, чтобы уделить ему отдельный раздел. Современные смартфоны это по сути мощные компьютеры, которые по случайному совпадению могут также совершать телефонные звонки. Почти все смартфоны имеют встроенный модуль Bluetooth, а также модуль WiFi, каждый из которых используется для управления дроном и/или получения данных и/или видео.
![]()
Инфракрасное излучение (Infrared (IR))
Инфракрасная связь (то что можно найти в каждом телевизионном пульте дистанционного управления) редко используется для управления дронами, так как даже в обычных комнатах (не говоря уже об открытом пространстве) присутствует так много инфракрасных помех, что они не очень надёжны. Несмотря на то, что технологию можно использовать для управления БПЛА, не может быть предложена как основной вариант.

Сенсоры
С точки зрения аппаратного обеспечения, контроллер полёта по сути является обычным программируемым микроконтроллером, только со специальными датчиками на борту. Как минимум, контроллер полёта будет включать в себя 3-осевой гироскоп, но без автовыравнивания. Не все контроллеры полёта оснащаются указанными ниже сенсорами, но они также могут включать их комбинацию:
- Акселерометр: Как следует из названия, акселерометры измеряют линейное ускорение по трем осям (назовём их: X, Y и Z). Обычно измеряется в «G (на рус. Же)». Стандартное (нормальное) значение, составляет g = 9.80665 м/с². Для определения положения, выход акселерометра может быть интегрирован дважды, правда из-за потерь на выходе объект может быть подвержен дрейфу. Самой значимой характеристикой трёхосевых акселерометров является то, что они регистрируют гравитацию, и как таковые, могут знать, в каком направлении «спуск». Это играет главную роль в обеспечении стабильности многороторного БЛА. Акселерометр должен быть установлен на контроллере полёта так, чтобы линейные оси совпадали с основными осями беспилотника.

- Гироскоп: Гироскоп измеряет скорость изменения углов по трём угловым осям (назовём их: альфа, бета и гамма). Обычно измеряется в градусах в секунду. Обратите внимание, что гироскоп не измеряет абсолютные углы напрямую, но вы можете выполнить итерацию, чтобы получить угол, который, как и у акселерометра, способствует дрейфу. Выход реального гироскопа имеет тенденцию быть аналоговым или I2C, но в большинстве случаев вам не нужно беспокоиться об этом, так как все поступающие данные обрабатываются кодом контроллера полёта. Гироскоп должен быть установлен так, чтобы его оси вращения совпадали с осями БПЛА.

- Инерционный измерительный блок (IMU): IMU — по сути, это небольшая плата, которая содержит как акселерометр, так и гироскоп (обычно многоосевые). Большинство из них включают трёхосевой акселерометр и трёхосевой гироскоп, другие могут включать дополнительные сенсоры, например трёхосевой магнитометр, обеспечивающий в общей сложности 9 осей измерения.

- Компас/Магнитометр: Электронный магнитный компас способный определять магнитное поле Земли и использовать эти данные для определения направления компаса беспилотника (относительно северного магнитного полюса). Этот сенсор почти всегда присутствует, если система имеет GPS вход и доступно от одной до трех осей.

- Давление/Барометр: Так как атмосферное давление изменяется по мере удаления от уровня моря, можно использовать сенсор давления, чтобы получить довольно точные показания высоты БПЛА. Для расчёта максимально точной высоты, большинство контроллеров полёта получают данные одновременно от сенсора давления и спутниковой системы навигации (GPS). При сборке обратите внимание, что предпочтительнее, чтобы отверстие в корпусе барометра было накрыто куском поролона, это уменьшить отрицательное влияние ветра на чип.

- Расстояние: Датчики расстояния все чаще используются на беспилотниках, поскольку GPS-координаты и датчики давления не могут рассказать вам, насколько далеко вы находитесь от земли (холма, горы или здания), либо столкнётесь ли вы с объектом или нет. Датчик расстояния, обращенный вниз, может быть основан на ультразвуковой, лазерной или лидарной технологии (ИК-сенсоры могут испытывать проблемы в работе при солнечном свете). Датчики расстояния редко входят в стандартный комплект полётного контроллера.

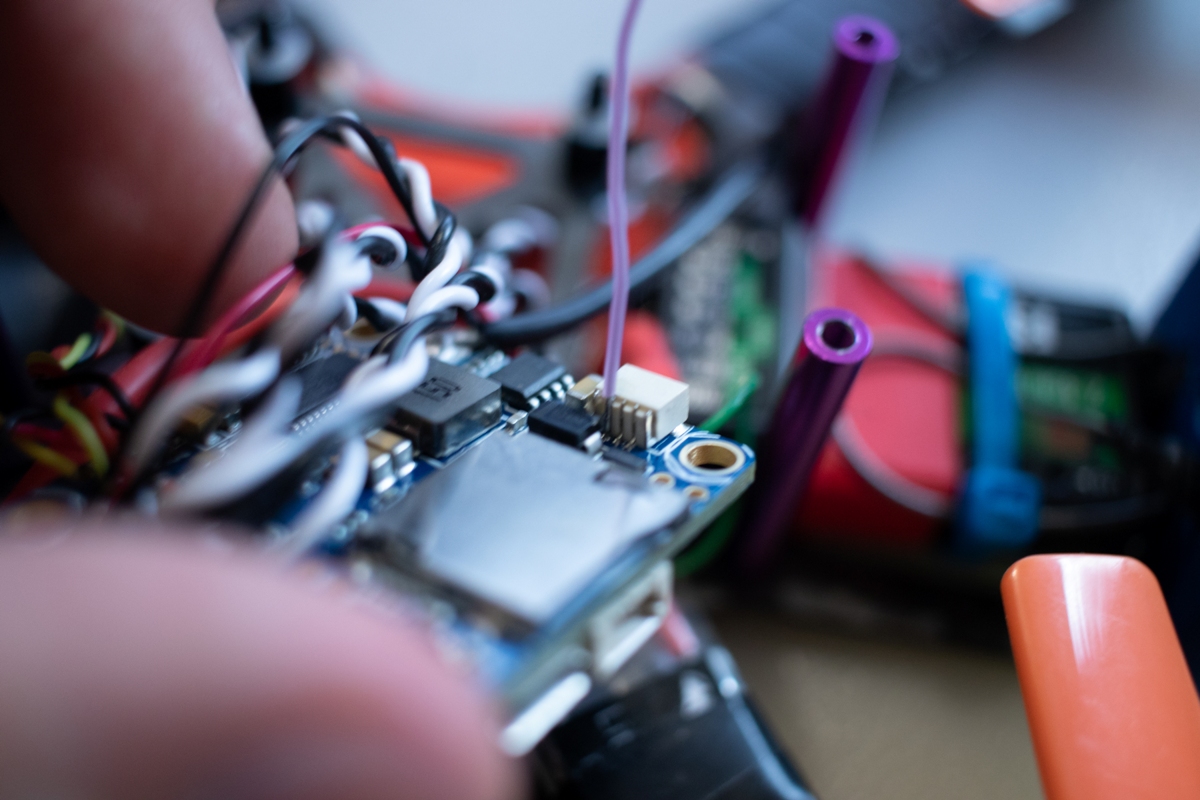
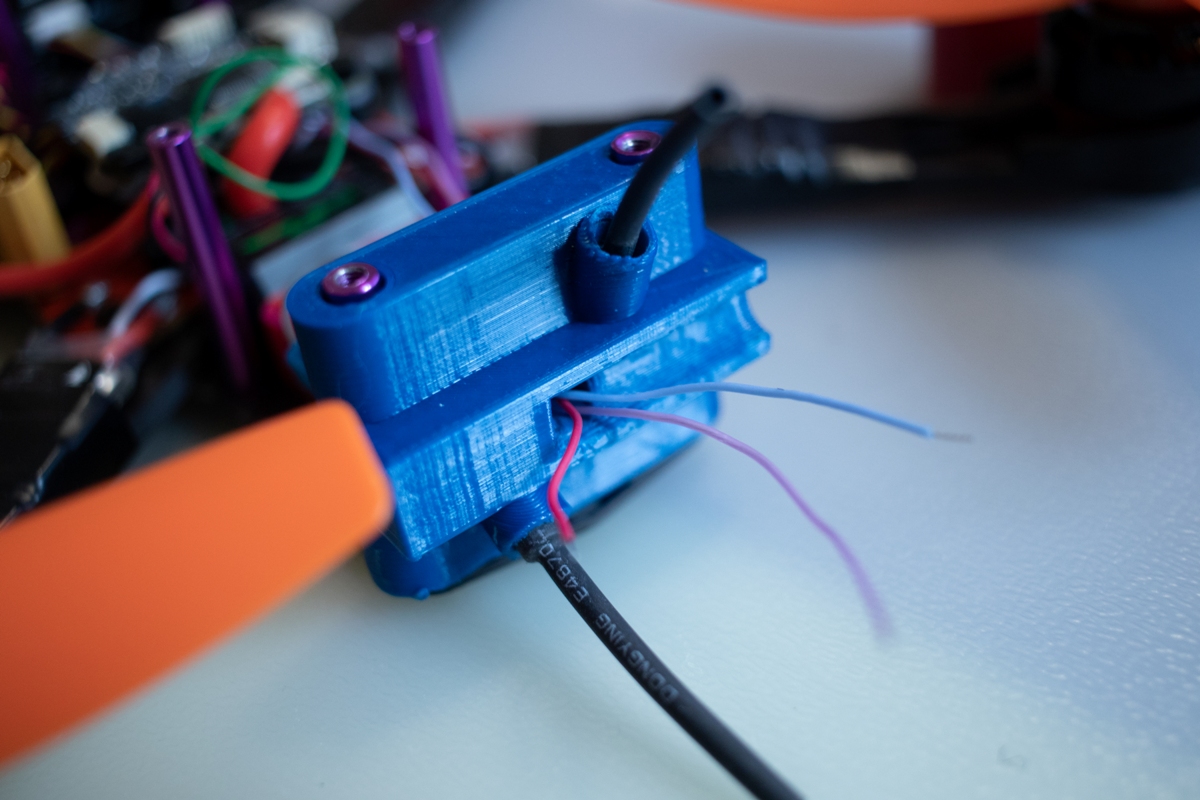
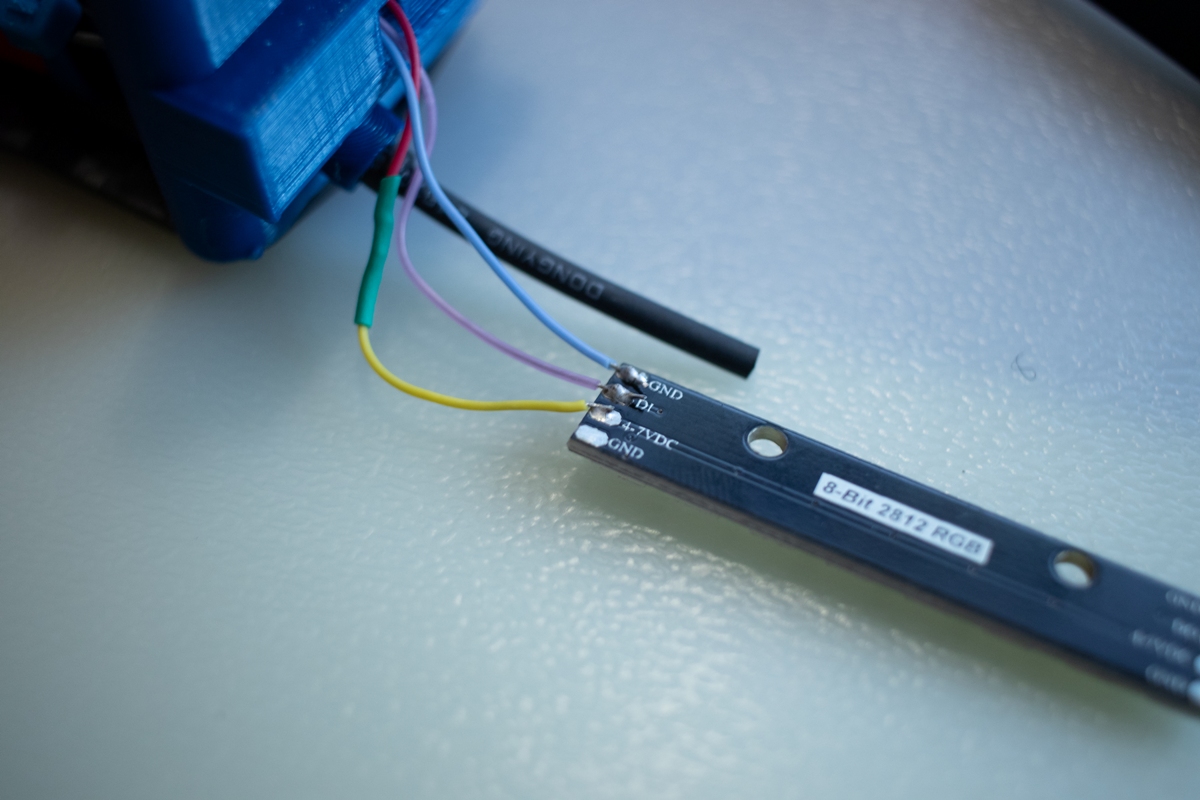
Установка led подсветки на квадрокоптер.
Во-первых, обозначу изменения с прошлой части. Мне, наконец-то, пришли LED панели, установил их сзади квадрокоптера. С подключением панелей трудностей не возникло, плюс и минус берем любые 5-вольтовые с платы, а сигнал LED я снял с коннектора вот таким вот образом.