

- «выгулять, так сказать, песика!»
- Pixelito
- Tailsitter — крылатый дрон с вертикальным взлетом
- Бпла вертолетного типа. "за" и "против"
- Дальнейшее развитие и перспективы
- Если сомневаешься — ставь больше пропеллеров!
- Недостатки решения
- Обучалки
- От китайских фонариков к беспилотникам
- Первые блины
- Постановка задачи
- Предпосылки к появлению электрического вертикального взлета
- Применение концепции в робототехническихсистемах и комплексах
- Развитие электрического вертолетостроения
- Решение задачи
- Улучшения и повышение стабилизации полета
«выгулять, так сказать, песика!»
Д. Д.: Всего существует восемь стадий разработки дрона. В целом квадрокоптер, беспилотный самолет и беспилотный автомобиль — это всё роботы, у них схожие структуры и везде нужно применять алгоритмы управления. Сенсорика при этом не всегда схожа.
Р. Ф.: Двигатели, которые стоят в дронах, обычно бесщеточные. У них есть отдельный блок управления, который представляет собой многоуровневую структуру. У двигателя установлен ESC — электронный speed-контроллер. Мы задаем желаемую тягу, а он отрабатывает, как нужно управлять двигателем, как переключать обмотку и так далее.
Следующее звено — это автопилот, сложная штука с контроллером и множеством датчиков: GPS, инерциальная навигационная система, барометр и прочие. Внутри автопилота выполняется логика управления движением. Также есть функциональные отдельные блоки — блок регулятора, планирования движения, простого движения из точки в точку и блок совмещения данных от разных сенсоров.
Р. Ф.: Автопилот в дроне — это низкоуровневая базовая вещь. Для дальнейшего и более интеллектуального управления используется уже бортовой компьютер, камеры, сенсоры и другие дополнительные устройства.
Р. Ф.: Разработка дрона начинается с концептуальных расчетов. Проектируется облик аппарата, его система управления: какие нужны тяги, какая будет аэродинамика и так далее. Затем выполняется математическое моделирование. По сути, это работа без «железа».
Следующим этапом является разработка системы управления, именно алгоритмики. Для симуляции используются различные подходы и пакеты, например, MATLAB, либо уже готовые симуляторы — Gazebo, Microsoft FS. В Университете Иннополис есть свой симулятор — Innopolis Simulator.
В нем есть не только визуальная демонстрация, но и симуляция всех датчиков, то есть он дает такие же данные, как датчики GPS, датчики персепшна, камеры и лидары. Это позволяет отрабатывать многоуровневые высокоинтеллектуальные технологии управления.
Когда мы отладили всё в симуляторе (а там оно обычно хорошо работает), можно перейти к самому интересному — к тестам, изготовлению тестового образца и летным тестам. В рамках нашего сотрудничества с Казанским авиационным институтом строятся производственные помещения для изготовления БПЛА, где будут применяться технологии изготовления дронов из углеволокна. Если говорить об аддитивной технологии, то это мы можем делать прямо в Иннополисе.
Д. Д.: Первым делом мы тестируем систему управления, чтобы она была максимально устойчивой. Допустим, нужно проверить, как квадрокоптер сопротивляется ветру. Это можно имитировать — например, Роман пытается его дергать и пускать в разнос, по сути, выступая внешним возмущением.
Но это не совсем летные тесты, это так называемые тесты на подвесе. Мы смотрим, как аппарат себя стабилизирует. Проводим и безумные эксперименты — в летающем коптере включаем маршевый двигатель, самолетный, и смотрим, как он себя ведет. То есть держит ли он так же правильно свою ориентацию, как и должен в коптерном режиме. Когда мы в душе уже уверены, что эта штука не упадет, можно запускать ее. Выгулять, так сказать, песика!
Р. Ф.: Главная проблема в разработке летательных аппаратов, которые не являются дирижаблями, заключается в том, что малейшая ошибка может привести к падению. С дирижаблем попроще — к нему можно там подключиться и даже что-нибудь перезапустить. А вот с самолетом и коптером малейшая погрешность, неточность в настройке, и всё.
Pixelito
Второй схемой, разрабатываемой параллельно, стала схема с вертикальным влетом моделиста из Бельгии по имени Александр. Он назвал свой вертолет Pixelito. Александр применил в нем схему, отличную от Proxflyer, у которой был лишь один несущий винт.
Стабильности ее полёта способствовало специальное устройство на винте: за неимением приемлемых по весу электронных стабилизаторов полета, на винт ставилось массивное навершие, выполнявшее при раскрутке роль гироскопа, управляющего углом атаки лопастей.
Сверху находится балансир (flybar, Bell/Hiller bar):
Как бы в последствии конструкторы ни пытались, без этой штуки вертолеты с одним винтом летать отказывались (пока не появились электронные стабилизаторы, управляющие углом атаки лопастей — flybarless схемы вертолетов). Первой же вертолетной схеме балансир был не нужен или, может быть, его функцию частично выполняло ограничительное кольцо на лопастях из бальзового дерева.
В этой модели моторчика было тоже два: для основного винта, который позволял лететь вверх-вперед, и для стабилизирующего пропеллера, с помощью которого можно было поворачивать. Модель получилась невероятно маленького размера, о чем можно судить по фото с хомячком, оно 2003 года, так что сорри за качество. Модель весила всего 6,9 грамм.
В 2003 году Александр был уже почти у создания работоспособной модели, и нашел Питера, создателя Proxflyer. Они решили объединить усилия, и таким образом довели свои модели до рабочих прототипов.
В записи от 15 Декабря 2003 года говорится:
«Сегодня мы с Питером с удовольствием представляем результат наших последних совместных разработок. Я создал вертолет Pixelito, а Питер — Proxflyer Micron (на тот момент уже не первую модель норвежца — мое примечание). Pixelito — это вертолет с моей собственной системой контроля ротора, а дизайн Питера уже довольно хорошо известен.
Мы называем их роботами, потому что такое название характеризует их лучше всего. Примерно 2 недели назад мы с Питером провели чудесные выходные у меня дома и после этого решили, что было бы неплохо вести совместные исследования, каждый у себя дома, но двигаясь к общей цели. Это вылилось в создание модели весом всего 6,9 грамм вместе с аккумулятором, и мы оба знаем, что это не предел.
Александр и Питер»
Видео только что созданного мини-вертолета Pixelito, но в ролике им управляет друг его создателя, автор Proxflyer Peter Muren. Можно догадаться, что Александр держит камеру.
Pixelito, 2003 год.
Третьим прототипом могла бы стать нашумевшая в то же самое время разработка японской фирмы Seiko Epson. Модель могла летать только вверх и вниз.
Tailsitter — крылатый дрон с вертикальным взлетом

Колоссальное преимущество квадрокоптеров и дронов вертолетного типа, связанное с отсутствием необходимости организации взлетно-посадочной полосы (ВПП) позволяет последним с высокой точностью взлетать и садиться почти в любой заданной точке. Их слабой звено, в сравнении с беспилотниками с фиксированным крылом “самолетного типа” – ощутимый проигрыш в энергоэффективности. Последние, в подавляющем большинстве, также далеки от совершенства — для взлета им понадобится катапульта или довольно протяженная ВПП, позволяющая набрать достаточную скорость взлета. Интересной альтернативой стоит признать конвертопланы – летательные аппараты, располагающие возможностью смены положения винта, крыла, двигателя или жалюзи с целью изменения вектора тяги из вертикального положения в момент взлета и посадки на горизонтальное — в полете. Таким образом, располагая энергоэффективностью БЛА самолетного типа, конвертопланы сохраняют и возможность вертикального взлета, как дроны и квадрокоптеры. Вместе с тем, необходимость выдерживать требования концепции существенно усложняет и удорожает их конструкцию.
Если о первых трех типах БЛА большинство из нас знает, то о таком летательном аппарате, как тейлситтер (Tailsitter) слышали далеко не все.
Сама идея, лежащая в основе и принципе действия конструкции тейлситтеров далеко не нова. Так концепт истребителя вертикального взлета и посадки Focke-Wulf Triebflügel был разработан еще в далеком 1944 в Германии. Над разработкой аналогичных аппаратов работали в США (Convair XFY Pogo) и во Франции (SNECMA Coléoptère). Но ни в одной из перечисленных стран широкого распространения пилотируемые летательные аппараты этого типа не получили. Теперь, спусти семь с лишним десятков лет идея, в своем видоизмененном «беспилотном» исполнении, снова обретает реальные очертания.

Focke-Wulf Triebflügel

Convair XFY Pogo

SNECMA Coléoptère
Главное отличие конвертоплана от тейлситтера в том, что конструкция последнего не располагает поворотными элементами. Поэтому, по сути, тейлситтер – модифицированный дрон с фиксированным крылом и вертикальным взлетом. Как выглядит тейлситтер “в деле” вы можете увидеть на видеоролике TED ниже (мин. 1.50 … 3.28).
Wingtra – так назвала свой тейлситтер одноименная компания при Швейцарской технической школе Цюриха. На стартовой площадке, как это видно на рисунке ниже, дрон удерживается благодаря нескольким опорным точкам — ребрам, отходящим от хвоста и крыльев. Именно эта особенность конструкции связывает БЛА с его названием: “tailsitter” (тейлситтер), буквально — “сидящий на хвосте”. Поднявшись в воздух на пропеллерах, аппарат разворачивается горизонтально и отправляется по воздушному маршруту подобно дронам самолетного типа.

Модель швейцарцев комплектуется аккумуляторной батареей, заряда которой хватает на час полета на дистанции до 60 км. Дрон может пролагать маршрут по заранее намеченным точкам без помощи оператора. Для совершения автономной посадки аппарат использует встроенную в хвост камеру. Как и знакомые нам квадрокоптеры, тейлситтер Wingtra способен переносить некоторую полезную нагрузку. Это может быть, к примеру, оборудование для инспекции сельскохозяйственных угодий или линий электропередач, медикаменты и другой малогабаритный полезный груз различного назначения. В компании Wingtra рассчитывают наладить массовое производство первой серии тейлситтеров к 2023 году.
Было бы странно, если бы все, что связано с перспективными разработками не находило бы отклика у инженеров Поднебесной. Один из центров разработки моделей тейлситтеров – Проектно-конструкторский институт авиастроения в Ченду. Первый действующий прототип, tailsitter БЛА VD 200 инженеры института представили еще в 2023 году. Размах крыльев махины составил без малого 4.6 метра, вес – 200 кг, длина, от пропеллера — до хвоста 1.8 м, диаметр пропеллеров – 2 метра, предельная скорость лета – 260 км/час, полезная нагрузка до 20 кг, дальность полета – 150 км, допустимое время пребывания в воздухе – до 3 часов.

БЛА VD 200 (Уменьшенная копия)
Дрон-tailsitter V-BAT, разработанный американской компанией MLB при поддержке DARPA способен оставаться в воздухе на протяжении 8 часов, перемещаться со скоростью до 83 км/ч и подниматься на высоту до 4.5 км. Допускается дооснащение беспилотника роботизированным манипулятором для выполнения ряда несложных задач.
Спектр возможностей БЛА V-BAT достаточно широк — от выполнения ударных военных миссий, воздушного патрулирования, поиска и обнаружения целей, аэрофотосъемки — до мониторинга городской инфраструктуры, автономной доставки и размещения полезного груза, надзора за сельхоз- и лесными угодьями, наблюдение ареала обитания диких животных и пр.

V-BAT
Концепция тейлситтера легла в основу проекта TERN американской компании Northrop Grumman, получившей в 2023 году $93 от агентства DAPRA на разработку палубных дронов с вертикальным взлетом, способных превратить практически любой корабль ВМС США в некоторое подобие ударного авианосца.

Таким образом, трудно не согласиться, что объединив лучшие качества БЛА самолетного и вертолетного типа, дроны-тейлситтеры получили в сравнении ряд своих уникальных преимуществ.
Взлет и полет тейлситтера. Испытание прототипа в полевых условиях
На этом всё, с вами был простой сервис для выбора сложной техники
Dronk.Ru
. Не забывайте подписываться на наш
блог
, будет ещё много интересного…

Спонсор поста кэшбэк-сервис LetyShops. Возвращайте деньги за любые покупки в интернете. Подробнее о том что такое кэшбэк-сервис читайте в нашей статье Выбираем кэшбэк-сервис на 6-летие Алиэкспресс
Бпла вертолетного типа. "за" и "против"
Дальнейшее развитие и перспективы
Благодаря совершенствованию бортовой электроники и использованию модулей GPS, модели научились удерживать свое положение в пространстве и постоянную высоту. На мультикоптеры стали ставить телеуправление, которое по-английски называется FPV — First Person View, вид от первого лица.
Проводятся гонки на мультикоптерах, чему способствует система управления с видом от первого лица.
Гонки на дронах с управлением с FPV, 2023 год
Позже одна компания при каком-то технологическом институте стала разрабатывать систему автоматического контроля не одного, а множества мультикоптеров и добилась впечатляющих результатов: они не только смогли заставить летать рой электрических устройств по заданным траекториям, не сталкиваясь.
Голограмма из дронов, 2023 год
Уже в 2023 году построили прототип мультикоптера, способного поднять над землей человека. Сейчас это направление активно развивается. Ведь для перевозки людей здесь есть преимущества перед вертолетами. Это и удобство управления, и более компактные размеры, и электричество в качестве топлива, и безопасность из-за наличия нескольких пропеллеров вместо одного-двух.
Первый мультикоптер с человеком на борту, 2023 год
https://www.youtube.com/watch?v=ObdHvSNe9W4
Устройство дронов продолжает совершенствоваться, для них появляется все больше сфер применения. Мультикоптеры совершенствуют многие авиапроизводители, включая Boeing. Да что там Boeing — сама Почта России уже во всю экспериментирует с доставкой грузов по воздуху.
Полет на квадрокоптере с видом от первого лица, от которого захватывает дух, 2023 год.
Возможно, скоро нас ждут аэротакси, огромные пространственные трехмерные скульптуры из дронов на любом большом празднике, доставка посылок и корреспонденции вне зависимости от того, где вы находитесь, а пиццы — всего лишь за три минуты!
Если сомневаешься — ставь больше пропеллеров!
Почти сразу после появления моделей вертолетов начались попытки создания многопропеллерных, если можно так выразиться, машин.
Чем больше пропеллеров было в модели, тем труднее было согласовывать их работу. Тот же вертолет Chinook с картинки выше, без гироскопа колбасило при полете так, что становилось сомнительным применение двух пар винтов. Для полета же моделей с тремя и более количеством двигателей требовалась электроника, на порядок сложнее вертолетной.
Поначалу стали экспериментировать с количеством электромоторов. Это сейчас почти всегда ставится знак равенства между дроном и квадрокоптером, но на заре их появления было совсем не так.
Изначально многомоторные модели собирали исключительно энтузиасты. Почти сразу же возникла идея ставить на модели компактные камеры, которых в то время было не много, а GoPro появилась уже позже, и удачно вписалась в тренд. Камеры собирали из собственноручно припаянных контроллеров к камерам от мобильных телефонов и так далее.
Конструкторы мультикоптеров подбирали материалы для их рам, экспериментировали с разными электродвигателями, стали паять различные модули для согласованного управления пропеллерами, писать для этого ПО и обмениваться удачными находками друг с другом. Получалось с переменным успехом.
Пока не было надежной электроники для согласования моторов и не появились миниатюрные гироскопы, смотреть на полеты таких устройств жутковато. Здесь были и поломанные рамы, и потерянные видеокамеры, и утонувшие в водоемах дорогостоящие электронные модули. Однако год от года стабильность, дальность полета, простота управления и качество снимаемых видео постоянно возрастали.
Появились коптеры с двумя, тремя, четырьмя, пятью, шестью, восемью и более пропеллерами — соответственно, бикоптеры, трикоптеры, квадро-, пента-, гекса- и октакоптеры.
Один из первых трикоптеров, 2023 год
И вот, после долгих экспериментов, модели стали уже летать стабильно. Можно было не бояться, что она завалится в воздухе на бок или что вибрация при полете будет мешать управлению.
Бикоптер
Поначалу все ставили себе столько пропеллеров, сколько хотели, но позже каждой схеме, все же, нашлось свое применение.
Пролет квадрокоптера с камерой GoPro Hero 3 на борту через фейерверк, лучше смотреть в HD, 2023 год
Машины с тремя и четырьмя моторами стали чаще применяться для развлекательных полетов, для съемки видео, а увеличенное число пропеллеров пригодилось в коптерах для перевозки грузов, а также в тех случаях, когда от мультикоптера требуется надежность. Ведь если при отказе одного из моторов в модели вертолета неизбежно происходит его крушение, то в случае моделей с несколькими двигателями нагрузку вышедшего из строя мотора можно распределить на другие и удержать машину в воздухе.
Октакоптер, специально предназначенный для перевозки грузов, 2023 год
Недостатки решения
Рассмотренный подход имеет следующие недостатки:
- уязвимость двигателей несущих винтов,
- маленький объем топливного бака из-за размещения в верхней части фюзеляжа.
Возможные решения:
- размещение несущих винтов в специальных гондолах и бронепластин, закрывающих двигатели (рис. 7)
- размещение топливных баков с внешней стороны фюзеляжа ЛА.

Рисунок 7 – Размещение несущих винтов
Обучалки
Для тех, кто хочет освоить азы пилотажа.
От китайских фонариков к беспилотникам
Р. Ф.: Первые летательные аппараты — это китайские фонарики. Дальше можно привести в пример монгольфьер — воздушный шар. Но самым известным из первых аппаратов стал самолет братьев Райт с мотором. Свои первые летательные аппараты они делали как планеры, но в 1903 году был зафиксирован еще не автоматический, но управляемый полет.
Но на самом деле история спорная, потому что в 1901 году уже летали дирижабли. В начале прошлого века самолеты и дирижабли сильно конкурировали. Дирижабли совершали трансатлантические полеты. Они были огромные, удобные, красивые, практически как лайнеры сейчас. Но в итоге самолеты, можно сказать, победили. Хотя дирижабли остаются и всё равно находят свою нишу.
Р. Ф.: Существует три принципа создания подъемной силы. Есть дирижабли — и это аэростатический принцип. Как надувной шарик за счет силы Архимеда поднимается и держится в воздухе. Есть аэродинамический способ — с фиксированным крылом или вращающимся ротором.
Р. Ф.: Мы работаем с гибридом двух из перечисленных технологий создания подъемной силы — конвертопланом. Это аппарат, который имеет возможность вертикального взлета и посадки, а также движения за счет крыла. Если говорить о применении беспилотных летательных аппаратов (БПЛА), то сегодня самое популярное — это хобби, фото- и видеосъемка.
Причем речь идет уже о вполне конкурентном и сформированном рынке. Следующее применение — вооруженные силы и финансы. Если говорить о военном применении, то Россия сегодня занимает 15% из общемировой практики применения воздушной робототехники. Еще один сегмент, в котором применяют дроны, — это мониторинг.
Сегодня активно развиваются решения для доставки и задач «последней мили». Также на подъеме точное земледелие, промышленные задачи и телекоммуникация. Один из кейсов — Google Ballon — аэростаты, которые раздают интернет. Ведущий производитель дронов — китайская компания DJI — с налетом более миллионов часов и уже более чем 70% от всего мирового рынка.
Р. Ф.: Одна из задач точного земледелия — мониторинг посевов. Кроме того, анализ вегетативного индекса и определение проблемных мест. Конечно, можно опрыскивать всё поле трактором, это дешевле на единицу площади, но не очень эффективно. Задача стоит — найти проблемные места, очаги распространения каких-то вредителей и прочее с помощью дронов, оснащенных специализированными инфракрасными камерами.
Еще один вариант применения — орошение и опрыскивание. Ребята из Казани сделали классный проект BRAERON — агродрон российского производства. Это такой огромный аппарат, у него два винта, которые работают за счет ДВС. Они создают основную подъемную силу. И есть коптерная схема, которая создает подруливающей силой момент для управления движением.
Р. Ф.: Еще один вариант применения БПЛА ради хобби — гонки дронов. Drone Racing League (DRL) — самая популярная из организаций, которые проводят эти соревнования. Есть и виртуальные гонки на основе симуляторов.
Первые блины
Первыми попытками создания коммерческих электрических моделей стали Kalt Whisper и Kyosho EP Concept. Конструкторам некоторых из фирм-производителей девайсов для хобби удалось так подобрать вес и другие характеристики компонентов, чтобы эти первые вертолеты, еще на старых коллекторных моторах, смогли отрываться от земли.
Производство Kalt Whisper и Kyosho EP Concept наладили примерно в 1991 году. Чуть позже в воздух поднялись изделия немецкой фирмы Icarus с именами ECO 8 и ECO 16 (1995). Наиболее продвинутой стала модель GWS Dragonfly, но и появившаяся уже позже, примерно в 1998.
Однако, у первых электрических моделей вертолетов присутствовала куча неразрешимых проблем. Маломощные электродвигатели не позволяли набирать высокую скорость подъема и передвижения в горизонтальной плоскости. От старых тяжеленных никель-кадмиевых аккумуляторов с 7-8 «банками» и невысокой удельной ёмкостью удавалось добиться от 4 до 12 минут полета.
Kalt Whisper, рекламное видео 1991 года
Основной проблемой стала дороговизна в магазинах и просто непомерная цена ремонта. Пилотировать эти модели хотя бы кое-как становилось возможным только после нескольких недель упорных тренировок.
Постановка задачи
Летательный аппарат(ЛА) – это машина или устройство для полетов в атмосфере или космическом пространстве. На данный момент классификация ЛА имеет огромное множество видов и типов летательных устройств, среди этого множества можно выделить один из активно используемых видов ЛА – вертолет.
Выделим принципиальные недостатки вертолета как класса:
- сложность погрузки грузов и техники больших габаритов из-за узкой грузовой кабины,
- посадка возможна только при отсутствии бокового крена из-за узкого фюзеляжа и одной зоны, ометаемой несущим винтом.
Для иллюстрации 3 и 4 недостатков рассмотрим транспортный вертолет Ми-26 (рис. 1).

Рисунок 1 — Вертолет Ми-26 в трех проекциях
Ширина грузовой кабины вертолета составляет 320 см, для сравнения, ширина бронетранспортера БТР-70 – 280 см, соответственно между каждым бортом транспортера и стенкой грузовой кабины вертолета остается пространство в 20 см, что является отрицательным фактором при погрузке техники таких габаритов (рис. 2, справа). На рисунке 2 (слева) проиллюстрирована сложность процесса погрузки с использованием автопогрузчика.
Наличие данного фактора вносит неудобства при применении вертолетов в гражданских грузоперевозках и является критичным при использовании таких летательных средств в ЧС и военных действиях.

Рисунок 2 – Процесс погрузки автопогрузчиком (слева), погрузка БТР-70 (справа)
Предпосылки к появлению электрического вертикального взлета
Еще пятнадцать лет назад в небе среди компактных летающих устройств можно было наблюдать только самолеты и вертолеты с двигателями внутреннего сгорания.
И во всем мире, и в СССР основой авиамоделизма неизменно выступали самолеты. Это были кордовые, неуправляемые и радиоуправляемые модели. Про модели вертолетов ходили только слухи, кто-то хвалился, что смотрел на полет такого, но им не верили, и никто радиоуправляемые вертолеты в глаза толком не видел.
Конкурс радиоуправляемых вертолетов 1982 года в СССР
У моделей самолетов с авиадвигателями, работающими не на топливе, а от электричества, дело обстояло получше, но для вертолетостроения электромоторы на протяжении более ста пятидесяти лет, с самого момента их появления, были абсолютно непригодны. Вертолеты на видео 1982 года тоже имеют ДВС-двигатели, и все они были полностью самодельные.
Вертолетомодельной промышленности просто не существовало, так что все, из чего сделаны вертолеты на видео, было подобрано с огромным трудом от других моделей и электроприборов, было выпилено, выточено и склеено вручную.
Применение концепции в робототехническихсистемах и комплексах
Беспилотный летательный аппарат (БПЛА) – летательный аппарат без экипажа на борту, реализованный с использованием средств робототехники. Реализация грузового квадрокоптера, как БПЛА, целесообразна:
- в робототехнических комплексах, например, в составе роботизированной транспортно-логистической системы (полностью автоматический процесс хранения и перевозки груза);
- как самостоятельной системы, для использования в условиях повышенной опасности для жизни пилота (ЧС, боевые действия);
- как самостоятельной системы, для решения задач, требующих большого количества ЛА и высокой степени оперативности (боевые действия, грузоперевозки, скорая медицинская помощь).
Исходя из вышеописанного применения грузового БПЛА, рассмотрим возможные реализации систем управления ЛА, с использованием классических подходов.
Централизованное управление с человеком-оператором (связь “один к одному”).Структура системы управления:
- человек-оператор,
- удаленный терминал,
- ЛА с бортовой интеллектуальной системой обработки информации.
Весь процесс управления ЛА реализуется оператором через терминал, бортовая система обработки информации анализирует информацию с датчиков и выдает оповещения оператору при отклонении параметров от нормы, прогнозирует возможные аварийные ситуации, т.е. представляет собой динамическую экспертную систему.
Централизованное управление с диспетчерским пунктом (связь “один ко многим”). Структура системы управления:
- человек-оператор,
- удаленный терминал,
- один или группа ЛА с бортовой интеллектуальной системой управления.
Человек-оператор через терминал реализует прокладку маршрута, устанавливает пункты назначения, контролирует корректность выполнения задач, состояние ЛА, т.е. выполняет функции диспетчера. Бортовая система управления управляет ЛА в автоматическом режиме. При данном подходе под контролем оператора может находиться множество ЛА.
Децентрализованное управление (связь “многие ко многим”).Структура системы управления:
- источники запросов (человек, техническая система),
- группа ЛА с бортовой интеллектуальной системой управления.
Источники запроса формирует заявки на обслуживание. Группа ЛА обрабатывает данные заявки и выполняют обслуживание исходя из приоритетов заявок и взаимного расположения ЛА и источников запроса. При данном подходе используются принципы группового управления роботами: опрашивание (с определением главного узла или базовой станции), кольцевая сеть с маркерным доступом или частный случай кольцевой сети – шинная сеть.
Развитие электрического вертолетостроения
С появлением летающих прототипов идею подхватили и другие производители игрушек, и, используя новые двигатели, аккумуляторы и подобрав более современный и легкий пластик, стали производить модели вертолетов одну за другой, сначала по норвежской схеме, ну а потом и по подобию Pixelito, по-моему, первые серийные модели так и назывались — Pixelito.
Вертолет одной из первых моделей по схеме, аналогичной Proxflyer, фирма Syma, 2007 год
Также одна из первых моделей английской фирмы Fastek Computers, 2007 год
Поначалу вертолеты были, в основном, соосные. Одним из самых плодовитых на тот момент производителей игрушечных радиоуправляемых вертолетов была китайская компания Syma. Авиамоделисты из всех стран также вовсю пробовали разные варианты построек моделей с вертикальным взлетом, и некоторые их достижения были довольно-таки выдающимися, но то, что быстрее всего дошло до конечного потребителя — это продукция фирм-производителей игрушек.
Одна из первых моделей по схеме Pixelito, 2-канальная, лишь с балансиром, 2008 год
В результате как норвежский, так и бельгийский моделисты неплохо заработали на продаже прав на производство вертолетов на дистанционном управлении, сделанных по их схемам.
В последствии разработками Питера заинтересовались DARPA и норвежское Министерство Обороны, инженер создал свою фирму Prox Dynamics и стал разрабатывать вертолет-шпион для военных целей.
Что сейчас там происходит и на какой стадии находится производство, неизвестно.
Решение задачи
Квадрокоптер – это летательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях. Такая схема размещения несущих винтов позволяет реализовать ЛА с фюзеляжем более широким чем в вертолетах (рис. 3), а наличие четырех несущих винтов обеспечит четыре ометаемые зоны, что позволит выполнять приземление и взлет при боковом крене.
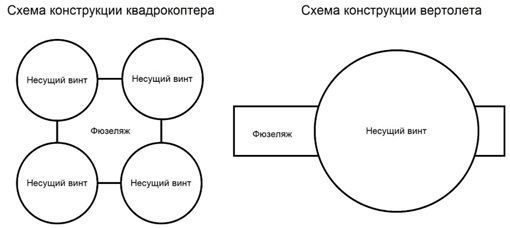
Рисунок 3 – Блок-схема конструкций квадрокоптера и вертолета
При использовании данной схемы такие узлы как топливная система, система управления, радиолокационная система, электрика размещаются в верхней части фюзеляжа в специальной бронекапсуле (рис. 4). Такая компоновка узлов позволяет разместить люки грузовых отсеков и грузовые трапы в любой из 5 сторон фюзеляжа (рис. 5): с четырех боковых сторон и снизу (люк вертикальной погрузки).
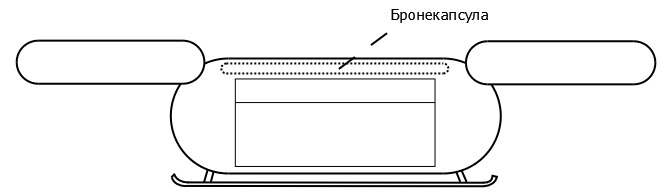
Рисунок 4 – Расположение бронекапсулы
Рисунок 5 – Размещение грузовых люков
Улучшения и повышение стабилизации полета
В то время как первые игрушечные вертолеты имели всего 2 канала управления (вперед-вверх и поворот лишь в одну сторону), любители для себя делали и модели на многоканальном радиоуправлении. Чтобы управлять самыми первыми моделями дистанционно управляемых вертолетов, требовалась довольно долгая тренировка, поскольку ровно удержать его в воздухе было довольно трудно, и многое зависело от мастерства пилота.
Для самых простых игрушечных вертолетов вместо радиоуправления применялось управление по инфракрасному излучению. В более продвинутых моделях — по радиоканалу. В дешевых моделях оно было двухканальным, чем дороже — тем каналов управления становилось больше.
В самых дешевых моделях на смену двухканальному управлению добавили третий, и управление стало больше походить на полноценный полет. Вот только держаться в воздухе, несмотря на множество каналов, было все еще непросто.
Обратите внимание, как трудно пилоту совладать с удержанием модели на месте:
Одна из первых моделей вертолетов, схема типа Pixelito, 2007 год.
Появление миниатюрных гироскопов значительно улучшило эту ситуацию. После добавления в модель этого устройства полет становился прямо непривычно стабилен, не надо было постоянно держать пальцы на клавишах управления. Однако такие модели стоили гораздо дороже, чем вертолеты без гироскопа. Гироскопы стали применяться и в моделях вертолетов с ДВС.
Видео про модели вертолетов с гироскопами, 2023 год
Самой популярной из моделей с гироскопом для массового покупателя была модель Syma S107, ну а самыми надежными, выдерживавшими прямые столкновения со стенами, зубы котов и бесконечные тараны мебели, наверное, являлись вертолетики фирмы Himoto.
После своего появления, новые устройства стабилизации стали ставиться и на самые первые модели электровертолетов. В магазинах появились наборы для модернизации Kalt Whisper, Kyosho EP Concept, Icarus ECO 8 и 16 и GWS Dragonfly. На тех же самых вертолетах, после установки гироскопа, литий-полимерных аккумуляторов и легких и мощных бесколлекторных двигателей стало возможно не только нормально летать, но и даже заниматься аэробатикой.
Демонстрация возможностей электровертолета с гироскопом, 2023 год. А ваш квадрокоптер так умеет?





 купить по привлекательной цене 46990 руб. в Москве")