
- Бортовой компьютер и сенсоры
- Безопасность
- И снова поисковая пищалка…. )))
- Монтаж приемника
- Моторы и пропеллеры
- Питание и контроллеры питания
- Подключение моторов квадрокоптера: установка двигателей
- Прошивка регуляторов оборотов в blhelisuite
- Сборка
- Ссылки на товары облегчающие поиск квадрокоптеров
- Схема проводки
- Теория полета
Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик — начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте.
На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; • компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет).
К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; • сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.
MegaPirateNG — это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
И снова поисковая пищалка…. )))
На сегодняшний день существует несколько видов поисковых пищалок, собственно все доступно и не обременительно как по цене, так и по качеству, например готовая тут:
 “Пищалка” для поисков модели в траве от Hobby King
“Пищалка” для поисков модели в траве от Hobby King  Товарhttp://www.parkflyer.ru/product/102775/
Товарhttp://www.parkflyer.ru/product/102775/
или самодельная тут:
 Самодельные поисковые маячки для моделей. 104
Самодельные поисковые маячки для моделей. 104
10 декабря 2023 года в 00:10 Георгий Головин Челябинск Статья http://www.parkflyer.ru/blogs/view_entry/3261/
Рассмотрев оба варианта, указанных выше, я пришел к выводу, что:
– в первом случае пищалку не включить с пульта, если приемник «не слышит» его сигнал – например, при падении модели отключилось электропитание приемника, антенна сломалась и т.п.
– во втором случае пищалка контролирует наличие импульсов на выходе канала приемника и при их пропадании (например, предполагается, что пропал сигнал передатчика) включает звуковой сигнал. Однако, ряд приемников (в т.ч. с функцией Fail Safe) «замораживают» последнее значение сигнала на своих выходах и таким образом импульсы на выходе всегда есть, а значит, эта пищалка не включится.
В то же время практически в каждом приемнике есть выход сигнала, показывающего состояние приемника в текущий момент – тот самый «зелененький/красненький светодиодик».
Например, у популярного приемника
.jpg) FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV) Товарhttp://www.parkflyer.ru/product/101891/
FrSky V8FR-II 2.4ГГц 8 канальный приёмник (HV) Товарhttp://www.parkflyer.ru/product/101891/
это красный светодиод, который при наличии сигнала от передатчика не горит (впрочем, как и при пропадании напряжения питания приемника), а при его отсутствии начинает приветливо подмигивать ))).
Этот сигнал приемника я и предлагаю использовать для включения пищалки или какого-либо другого устройства, работа которого необходима при возникновении проблем связи с приемником. Указанный светодиод включен между выходом трансивера и общим проводом («минусом») питания приемника.
Доработав (
НА СВОЙ СТРАХ И РИСК!!!
) немного приемник (немного – это рублей на 5-10) можно получить выход для управления …хм…, например, поисковой пищалкой при пропадании сигнала передатчика/отключении питания приемника.
По поводу включения-выключения.… В сравнении с функционалом первой пищалки (см. ссылку на магазин Паркфлайера выше), в данном случае внешним устройством так же можно управлять сигналом с пульта – достаточно отключить пульт для того, чтобы приемник потерял сигнал и изменил состояние сигнального выхода.
В сравнении с функционалом второй пищалки (см. ссылку на статью выше), в данном случае нет зависимости от наличия/отсутствия/«замораживания» импульсов на выходе приемника – исполнительное устройство все равно будет включено при нештатной ситуации с приемом сигнала от передатчика (пульта).
Реализация
Для связи с внешними устройствами я дополнил схему индикации приемника токоограничивающим резистором R* сопротивлением 1,5кОм…2,4кОм для защиты приемника от короткого замыкания на сигнальном выходе. Для защиты трансивера приемника от случайной подачи извне на его выход напряжения обратной полярности следует установить параллельно штатному светодиоду приемника (D1 по схеме приемника, подписан на плате приемника) малогабаритный (например, КД521/КД522) диод D* в обратном включении (рис. 1). Лично я устанавливать диод не стал – видимо, самонадеянный я слишком ))). Добавляемые в приемник элементы на схеме выделены красным цветом.

Вывод сигнала выполнен кабелем, сделанным из половинки удлинителя для сервопривода со штатным разъемом. Вторая половинка кабеля с ответным разъемом припаяна к пищалке. Кроме вывода сигнала управления пищалкой, на выходной разъем выведено также напряжение питания приемника для контроля его наличия и возможной организации питания каких-либо устройств напряжением 5…6В от ВЕКа.
Резистор R* и диод D* устанавливаются внутри корпуса приемника – места для размещения там достаточно.
Аккуратно открываем боковые защелки 1 (рис. 2) с двух сторон корпуса приемника, разделяем части корпуса и вынимаем плату, освободив ее от защелок 2 в корпусе. С печатной платой нужно быть осторожнее – вещь нежная и любая деформация платы (изгиб и т.п.) может привести к отслоению SMD-компонентов и выходу приемника из строя!!!
Для обеспечения жесткости монтажа резистора я использовал одно из штатных «условно свободных» контактных отверстий в плате приемника, отрезав от него печатную дорожку, место разрыва которой на рисунке помечено красным крестом (рис. 3). Резистор R*, типа МЛТ-0.125 (его мощность тут ни при чем, все дело в размерах), одним своим выводом припаян к контактной площадке штатного светодиода (D1 по схеме приемника, подписан на плате) на плате приемника, другим – в освобожденное отверстие в плате приемника (рис. 3). Диод припаивается навесным монтажом параллельно светодиоду и «укладывается» на свободном месте рядом с ним.
С обратной стороны платы к выводу резистора, выводам «плюс» и «минус» штатного выходного разъема приемника припаян выходной кабель (рис. 3). Дорожку можно не резать, а оставить вывод резистора с припаянным проводом «висеть в воздухе», но, на мой взгляд, это не есть нормально, к тому же указанные штатные выводы приемника на плате я никогда не использую.
Для вывода сигнального кабеля в крышке корпуса приемника (меньшая часть корпуса) плоским надфилем сделана выборка с тем, чтобы кабель зажимался частями корпуса при его сборке. В итоге получилось как-то так (рис. 4):
В качестве источника звука используется активный звуковой излучатель (динамик и звуковой генератор в одном корпусе), аналогичный этому (Uпит=5V) http://ru.aliexpress.com/item/New-Arrival-10pcs-5v-Active-Buzzer-Magnetic-Long-Continous-Beep-Tone-Free-Shipping/2051767497.html или этому (Uпит=12V) http://ru.aliexpress.com/item/Brand-New-10-Pcs-12V-Buzzer-Magnetic-Premium-Sound-Alarm-Long-Continous-Beep-Tone/32318897595.html. Потребляемый 5-вольтовым звуковым излучателем ток около 25мА.
Для управления звуковым излучателем собрана схема на широко распространенных и доступных элементах, представленная на рисунке 5. Бюджет устройства составил около ста рублей, включая сам активный излучатель.
Описание и принцип работы устройства
На транзисторе VT1 собран буферный каскад для согласования с выходным сигналом приемника по уровню напряжения. На транзисторах VT2 и VT3 собрана схема контроля наличия напряжения питания приемника и управления звуковым излучателем.
При наличии сигнала передатчика и поданном на приемник питании, на «сигнальном» выходе приемника, а значит и на базе транзистора VT1, подключенного через резистор R* к этому выходу, отсутствует напряжение, при этом транзистор VT1 закрыт. На базу транзистора VT2 через резистор R2 подается напряжение питания приемника («контроль наличия напряжения питания»), открывая этот транзистор, при этом на базе транзистора VT3 напряжение отсутствует и он закрыт, а звуковой излучатель обесточен.
При пропадании сигнала передатчика на сигнальном выходе приемника появляется напряжение около 2,6В, которое подается на базу транзистора VT1 и открывает его. При этом на базе транзистора VT2 напряжение становится равным нулю и он закрывается, что приводит к подаче через резистор R4 напряжения питания пищалки на базу транзистора VT3, который в свою очередь открывается и подает питание на звуковой излучатель. Учитывая, что при пропадании сигнала передатчика напряжение на выходе приемника появляется в виде импульсов, пищалка издает прерывистый звуковой сигнал.
При пропадании напряжения питания приемника (забыли подключить кабель, приемник оторвался от батареи при аварии, «разбился» ВЕК, питающий приемник и.п.) напряжение на базе транзистора VT2 так же будет отсутствовать и транзистор закроется, при этом напряжение питания пищалки будет подано через резистор R4 на базу транзистора VT3, что приведет к его открытию и включению звукового излучателя. В этом случае пищалка будет издавать непрерывный звуковой сигнал все время, пока нет питания приемника.
Детали и возможная замена
Транзисторы VT1, VT2 и VT3 – КТ315Г и могут быть заменены на любые биполярные транзисторы малой мощности указанной проводимости. Для VT3 нагрузочные способности должны соответствовать электрическим характеристикам нагрузки, включенной в цепь его коллектора.
При необходимости увеличения мощности сигнализатора, транзистор VT3 может быть заменен на мощный полевой транзистор – «мосфет» с n-каналом (с переработкой печатной платы соответственно), а стабилизатор напряжения придется установить на радиатор, но, скорее всего, стабилизатор в этом случае не потребуется вовсе, ибо у мощной нагрузки и питание чаще всего не 5В))).
Транзистор VT1 также может быть заменен тразисторным оптроном (рис. 9). Резистор R* и диод D* (рис. 1) в этом случае не нужны.
Все устройство собрано на печатной плате размером 13х33мм (длина «обрезана» после установки излучателя, «по месту») из одностороннего фольгированного стеклотекстолита толщиной 1,5мм. Чертеж печатной платы представлен на рис. 6.
Каскад на VT1 питается непосредственно от приемника, каскады VT2 и VT3 питаются от отдельной линии питания напряжением 2S-3S, при этом источник питания – бортовая аккумуляторная батарея – может быть один и тот же. Такая схема питания, учитывая малое потребление тока (около 40мА) пищалкой, позволяет последней работать при аварии очень долго.
Печатная плата (рис. 6) включает возможность установки либо линейного стабилизатора (на схеме рис. 5 не показан), либо перемычки в зависимости от напряжения питания пищалки.
Правильно смонтированное и подключенное устройство не требует наладки и начинает работать сразу.
Если контроль наличия напряжения питания приемника не нужен, то схему (рис. 5) можно значительно упростить, оставив только элементы R1 и VT1. Звуковой излучатель в этом случе подключается к коллектору VT1 (рис. 7). При этом пищалка будет издавать прерывистый звуковой сигнал только при пропадании сигнала передатчика. Питание пищалки малой мощности можно осуществлять от цепей питания приемника (рис. 7а).
При необходимости увеличения мощности сигнализатора, транзистор VT1 типа КТ315Г может быть заменен на мощный полевой транзистор – «мосфет» с n-каналом. В этом случае питание пищалки должно осуществляться от отдельной линии питания (рис. 7б).
Транзистор VT1 вместе с резистором R1 на схеме рис. 7 могут быть заменены тразисторным оптроном (рис. 9), однако максимальная нагрузка будет ограничена параметрами оптрона и чаще всего не превышает 50В/50мА. Диод D* и Резистор R* (рис. 1) в этом случае не нужны.
Кроме звукового излучателя, нагрузкой схемы управления (рис.5, рис.7) могут быть световые индикаторы и механические исполнительные устройства (например, для приемников без функции «FS» – выпуск аварийного буя затонувшей водной модели, выпуск парашюта воздушной модели и т.п. – фантазируйте сами )))).
Кстати, сверхяркие мощные светодиоды (белый, 3Вт 220лм) начинают светиться уже на микротоках и при токе в 10…30мА обеспечивают достаточно яркую индикацию.
Печатная плата для схемы на рис. 7 не разрабатывалась – навесной монтаж получается более компактным и удобным для монтажа. Примерное раположение элементов показано на рис. 7В.
Выводы звуквого излучателя необходимо отрезать на нужную длину (на фото они пока оригинальные)))). Крепление делалей осуществляется следующим образом: вывод коллектора отогнут на 90 градусов с тем, чтобы транзистор можно было расположить «в распорку» между выводами звукового излучателя. С одной стороны транзистор крепится с помощью пайки его коллектора к выводу излучателя, с противоположной стороны транзистор прижать отогнутым выводом звукового излучателя. Резистор припаян к выводам базы и иэмиттера транзистора.
В принципе, держится нормально, учитывая, что потом обтягивается термоусадочной трубкой….
Правильно смонтированное и подключенное устройство не требует наладки и начинает работать сразу.
Внутренние неисправности приемника во всех случаях данным устройством не диагностируются.
Ку уже отмечалось выше, с разъема выходного кабеля через стандартный Y-разветвитель может быть подано питание 5…6В на различные дополнительные устройства модели, не относящиеся к данной статье.
Варианты работы с другими приемниками
Рассмотрим возможность подключения пищалки аналогичным образом к другим приемникам, имеющим светодиодную индикацию режима работы. Схема подключения внутреннего светодиода и аппаратная реализация приемника может отличаться от рассмотренного выше приемника. У отдельных моделей приемников схемотехника включения светового индикатора вообще не позволяет использовать «плюс» или «минус» питания приемника в качестве общего провода при организации внешнего выходного сигнала.
Например, у этого клона (рис. 8) известной модели ))) сигнальный светодиод включен между выходом микросхемы и плюсом питания приемника, а имеющийся на выходе уровень напряжения не позволяет полноценно использовать его во внешних схемах.
Алгоритм работы световой индикации режима работы так же отличается от приемника FrSky, рассматриваемого выше и выглядит следующим образом:
– при наличии сигнала передатчика и напряжения питания светодиод приемника постоянно светится;
– при отсутствии сигнала передатчика светодиод приемника мигает;
– при отсутствии напряжения питания светодиод не светится вообще )))).
Будем собирать схему управления пищалкой, исходя из этих условий.
Сначала выводим из приемника сигнал. Так как цепи включения штатного светодиода нам (по условию задачи) не ведомы либо на выходе приемника уровень сигнала не позволяет использовать его во внешних схемах, выходим из положения установкой транзисторного оптрона – благо, что они есть в любом радиомагазе по цене 17…20руб. В этом случае нет смысла задумываться о схемотехнике приемника – просто подключаем светодиод оптопары через токоограничивающий резистор Rдоб параллельно штатному светодиоду приемника (рис. 9). Величину токоограничивающего резистора – от единиц до сотен Ом – необходимо подобрать в зависимости от параметров выходного сигнала приемника и применяемого оптрона.
Так, сигнал из приемника вывели наружу…
Пришла очередь разработать схему управления пищалкой, вспомнив описанный выше алгоритм световой индикации режима работы этого приемника-клона. Схема устройства представлена на рисунке 10. Бюджет устройства около 60…70 рублей, включая стоимость активного звукового излучателя.
Описание работы устройства
При поданном на приемник напряжении питания и наличии сигнала передатчика светодиоды приемника и оптопары включены и светятся непрерывно. При этом транзистор оптопары DA1 открыт, на базе транзистора VT1 отсутствует напряжение, и он закрыт, а пищалка обесточена.
При пропадании сигнала передатчика светодиоды приемника и оптопары начинают мигать, при этом с погасанием светодиода оптопары ее транзистор закрывается, на базу транзистора VT1 через резистор R1 подается напряжение питания пищалки и открывает транзистор, который в свою очередь подает питание на звуковой излучатель, издающий в этом случае прерывистый звуковой сигнал.
При пропадании напряжения питания приемника светодиод оптопары также гаснет, ее транзистор закрывается, далее все как в случае пропадания сигнала передатчика с той лишь разницей, что звуковой сигнал будет непрерывным все время, пока нет питания приемника.
Пищалку с напряжением питания 5В можно также питать от цепей питания приемника, аналогично схеме на рис. 7а (см. цепи « /- Uпит»), при этом пищалка будет работать только при пропадании сигнала передатчика.
Детали и возможная замена
Транзисторный оптрон DA1 типа РС120 может быть заменен на любой другой, подходящий по параметрам и размерам. Особое внимание при выборе следует уделять параметрам светодиода оптопары.
Транзистор VT1 типа КТ315Г может быть заменен любым биполярным транзистором аналогичной проводимости малой и средней мощности, а так же мощным полевым транзистором – «мосфетом» с n-каналом – в случае, если требуется увеличить мощность ключа.
Как вы уже заметили, более простой приемник, но с другим алгоритмом работы индикации режима позволяет обойтись меньшим числом (а значит весом и стоимостью!) деталей, обеспечивая при этом максимальный функционал собранного устройства.
У упомянутого выше приемника FrSky похожий функционал можно получить, применив схему на рис. 10 совместно со штатным зеленым светодиодом приемника, который светится при наличии питания приемника и обмене пакетами с передатчиком. Однако, сигнал на этом выходе импульсный, что потребует дополнительно позаботиться о сглаживании пульсаций на входе внешнего устройства, например, изменив цепь включения базы VT1. Плюс к этому – пищалка будет издавать непрерывный звуковой сигнал и при пропадании напряжения питания приемника, и при потере сигнала передатчика.
Напоследок пара рекомендаций
Активные излучатели бывают как с питанием 12В, так и с питанием 5В. Я бы рекомендовал использовать 5-вольтовую пищалку с питанием от 12В через стабилизатор напряжения 5В.
Почему? При снижении напряжения питающей батареи ниже минимального порога напряжения питания пищалки, 12-вольтовая пищалка перестанет работать, а 5-вольтовая, включенная через стабилизатор, все еще будет подавать сигнал. Конечно, батарея при этом разрядится до состояния «теперь только в помойку», зато будет больше времени на поиски. В данном случае, я думаю, найденная модель будет стоить гораздо больше «убитой» батареи….
Еще один момент, связанный с поиском по звуку.
Звуковой излучатель, имеющий небольшую мощность, в готовых устройствах чаще всего располагается на печатной плате устройства, кстати, поисковая пищалка, описанная здесь (рис. 5), выполнена по тому же принципу. Это налагает определенные ограничения в установке пищалки на модели и чаще всего приводит к тому, что устройство размещено внутри модели, а размещенная внутри модели пищалка «теряет» в силе звука. Кроме того, будучи установленной с одной стороны модели, пищалка имеет шанс вообще не быть услышанной на расстоянии, если модель при падении упрется ее (пищалки) выходным отверстием в землю.
Таким образом, напрашивается решение с установкой на модель двух звуковых излучателей. Например, один – в носовой части ЛА, другой – в хвостовой части ЛА с направлением звука в разные стороны. Такой вариант увеличит силу звука и шанс услышать пищалку.
С точки зрения монтажа сам звуковой излучатель достаточно технологичен в установке, он имеет круглый корпус D=12мм L=9мм и может быть вынесен проводами за пределы печатной платы, а круглые отверстия делать гораздо легче, чем квадратные ))))
С точки зрения схемотехники, то тут тоже все просто – излучатели можно соединять как параллельно (12-вольтовые) так и последовательно (5-вольтовые). Во втором случае стабилизатор типа 7805 (Uвых=5В) на плате (рис. 6) следует заменить на стабилизатор типа 7809 (Uвых=9В). Поднять напряжение на его выходе еще примерно на полвольта можно, включив в цепь его управляющего вывода («обычно» этот вывод подключен к общему проводу – «минусу» питания) любой кремниевый диод (рис. 11). 
Монтаж приемника
Приемник используется FrSky XM .
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: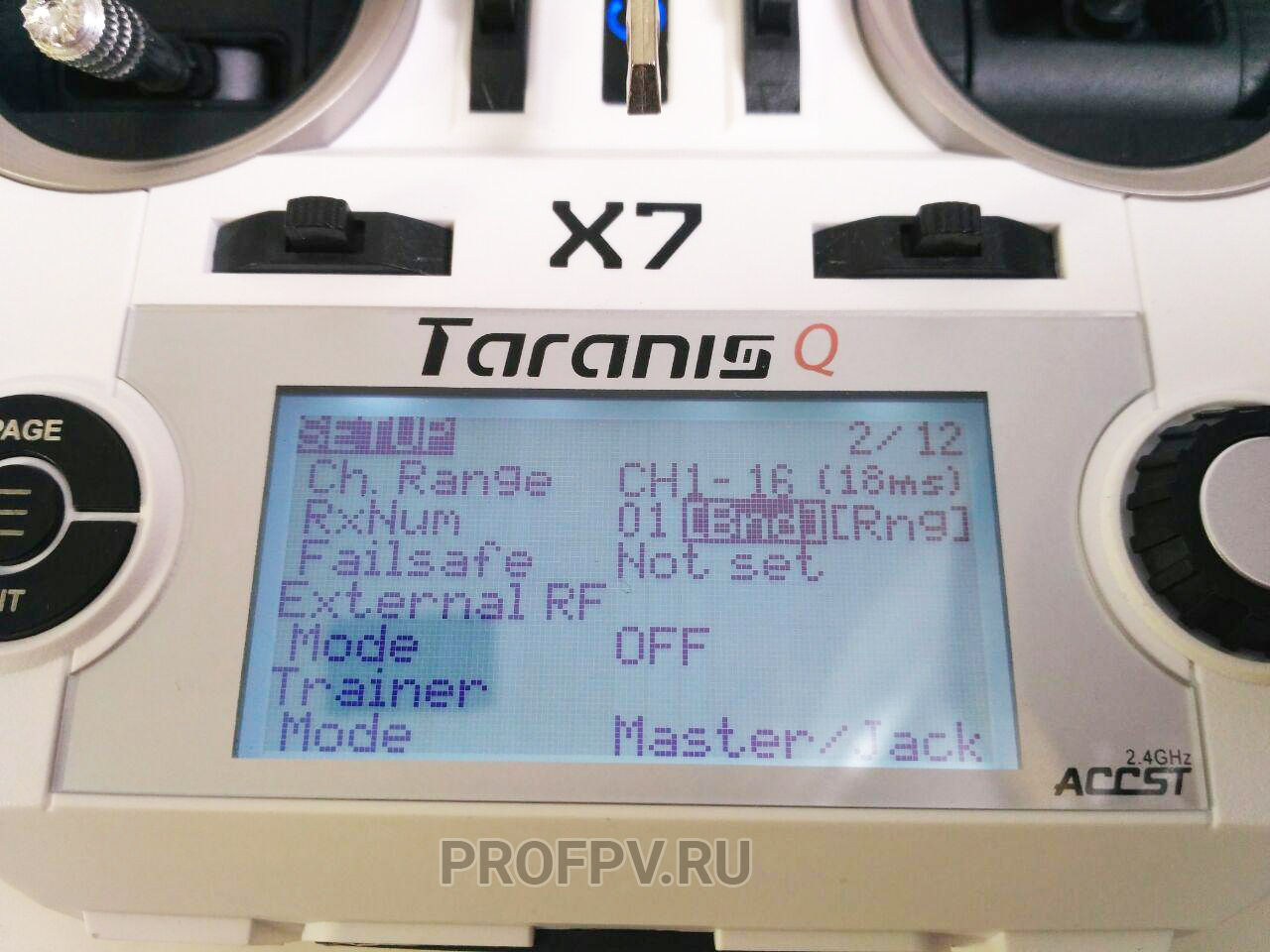
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:
Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:
Получится вот такое:
Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке.
Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.

он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя.
Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.

И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент.
Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше — тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка — это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов.
На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус — при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время.
Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 • 10 A = 40 A, а батарея может выдавать 2,2 A • 30 = 66 A или 2,2 А • 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата.
Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке.
Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном — емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) — это три последовательно подключенных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении.
Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки.
Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой.
Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.
Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module — модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее.
Подключение моторов квадрокоптера: установка двигателей
Второй этап пошаговой сборки квадрокоптера. Раньше было популярно производить двигатели с правой и левой резьбой, чтобы в процессе полета гайки всегда самозатягивались, но в последнее время все чаще производители продают двигатели с резьбой на валу только в одну сторону.
Поэтому, просто покупайте сразу по 4 штуки двигателей без привязки к стороне, в которую они должны крутиться, это мы потом поправим при настройке прошивки.
Чтобы все смотрелось красиво, можно использовать оплетку жгутов или шнуров, например, вот так:
А можно использовать просто термоусадку. Будет менее красивее, но защита такая же.
В комплекте с двигателями будут идти 2 размера винтов, для толстой рамы и для тонкой рамы. Так как у этой рамы лучи толщиной 5 мм, то используйте самые длинные винты. До оплетки двигателя они не достанут.
Теперь вам потребуется фиксатор резьбы. Продается в любом магазине автозапчастей. Использовать желательно синий, но если остался красный, то просто лейте его в очень малых количествах на резьбовые соединения. Выглядит он так:
Смажьте винты и прикрутите двигатели к раме. Будьте аккуратны и не сорвите резьбу.
После того, как прикрутите двигатели, отмерьте длину проводов, которую нужно будет оставить для припаивания. Отмерять нужно на напрямую, а с учетом изгибов. Вот так:
Провода припаиваются также, как идут от двигателя — по порядку, хотя и можно нарушить порядок и поменять крайние провода местами, тогда двигатель начнет крутиться в другую сторону. А вот средний провод перепутать нельзя, он должен быть обязательно по центру и припаян к средней площадке.
После того, как отмерите, отрежьте лишнее, удалите изоляцию с концов, залудите. Отмерьте и отрежьте кусок термоусадки, либо оплетки и наденьте на провода:
Теперь все это дело нужно припаять. Прогревать надо хорошо, чтобы получился качественный контакт, иначе у вас могут возникнуть проблемы в виде того, что при запуске двигатели будут отключаться (как один из вариантов):
Затем проходим по термоусадке зажигалкой или феном для пайки, чтобы она стянулась.
Прошивка регуляторов оборотов в blhelisuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
Нажимаем Flash BLHeli:
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
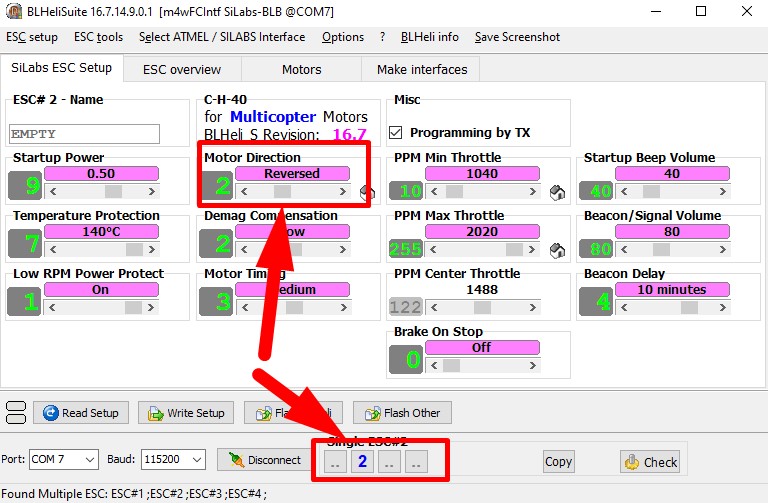
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера.
Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них).
Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм).
Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку.
Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками.
Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы.
К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то.
Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема.
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.
Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
Ссылки на товары облегчающие поиск квадрокоптеров
 Vifly Finder 5V Super
Vifly Finder 5V Super![]() Купить: , ,
Купить: , ,  Signal loss Alarm &
Signal loss Alarm &![]() Купить: ,
Купить: ,  5 Pcs Signal loss
5 Pcs Signal loss![]() Купить: ,
Купить: , ![]() iMars™ Micro GPS Tracker
iMars™ Micro GPS Tracker![]() Купить: ,
Купить: , ![]() GPS GSM GPRS Tracker
GPS GSM GPRS Tracker![]() Купить: ,
Купить: ,  Motorcycle Motor TK102 Mini
Motorcycle Motor TK102 Mini![]() Купить: ,
Купить: ,  Real time Mini
Real time Mini![]() Купить: ,
Купить: ,
Константин, Обзор квадрокоптеров
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит.
Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру.
Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит».
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.

В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт.
Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два — против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами.
Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся.
А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо.
Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса.
Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch.
Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.


 (LiPo) - 94182PRO")





