

- Почему квадрокоптер тянет в сторону
- Diy автономный дрон с управлением через интернет. часть 2 про по
- Mavproxy
- Базовые принципы полета квадрокоптера
- Видеотрансляция
- Дрон не подключается к мобильному телефону или контроллеру.
- Видео
- Зарядка квадрокоптера
- Как настроить и подключить квадрокоптер к телефону
- Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
- Как провести триммирование для квадрокоптера
- Настройка и запуск ardupilot
- Потеряна связь от передатчика к квадрокоптеру
- Режимы полета
- Ремонт двигателя syma x5c
- Советы по устранению неполадок подключения wi-fi дрона, которые нужно попробовать в первую очередь
- Управление квадрокоптером через смартфон
- Управление квадрокоптером syma x8
- Часть 2 : как включить трансляцию при использовании масштабирования?
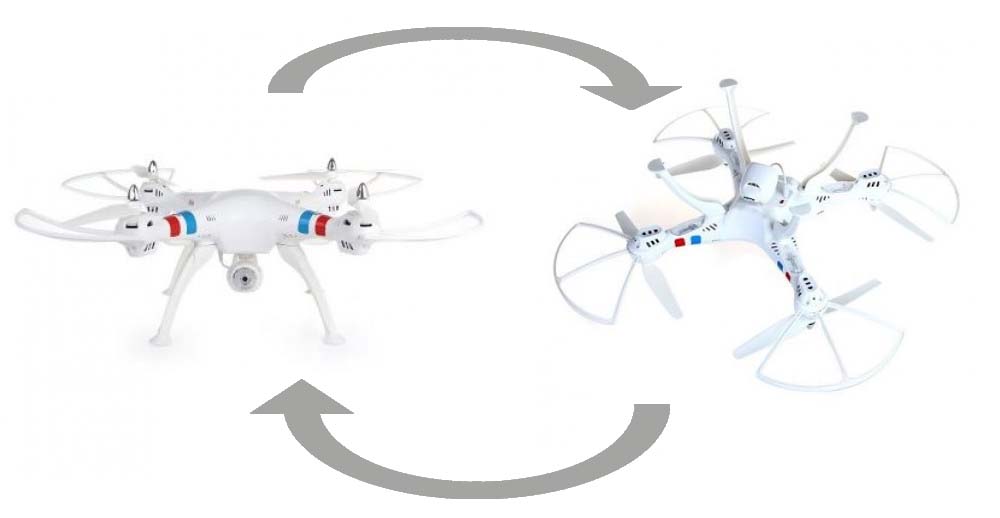
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
- Неправильные настройки. Перед отправкой в магазины дроны подготавливают для полета, но в процессе многочисленных транспортировок калибровка может сбиться.
- Слишком туго насажен один из винтов. Если при сборке допущена ошибка, и какой-то пропеллер вращается с большим усилием, нежели остальные, квадрокоптер будет тянуть в сторону.
- На ось двигателя в месте крепления винта намотались нитки, травинки или волосы. Такое часто случается со старыми дронами — сам пропеллер в порядке, но лишние элементы тормозят его вращение.
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом.

Diy автономный дрон с управлением через интернет. часть 2 про по
Это продолжение повествования об автономном дроне. В первой части говорилось про hardware, в этой речь пойдет про software. Для начала небольшой ликбез про взаимодействие оператора с коптером. Вот типичная схема у большинства самосборных дронов:
А вот схема у продвинутых дронов:

Так работают игрушечные дроны, которые управляются со смартфона:
Управлять дроном через интернет можно так (при наличии сим-карты со статическим IP-адресом):
Или так, если IP-адрес динамический:
Для надежности и резервирования каналов связи последний вариант можно развить до такого состояния:
Далее я буду описывать процесс настройки полетного контроллера Emlid Navio 2 и микрокомпьютера Raspberry Pi 3.

Но, с небольшими модификациями, эти настройки подойдут для любого полетного контроллера, с которым можно общаться по протоколу MAVLink в связке с любым компьютером на ОС семейства Linux.
Важно! Настройку необходимо делать с отключенным питанием на регуляторах оборотов, чтобы случайно не запустились двигатели.
Mavproxy
mavproxy.py —master=udp:127.0.0.1:14550 Параметр—master=udp:127.0.0.1:14550задает для скрипта источник данных. Это локальный UDP-порт, который был прописан в файле конфигурации Ardupilot. После запуска команды, MAVProxy соединиться с этим портом и выведет на экран сообщения автопилота, примерно как у меня: [email protected]:~ $ mavproxy.py —master=udp:127.0.0.1:
14550 Connect udp:127.0.0.1:14550 source_system=255 Failed to load module: No module named adsb. Use ‘set moddebug 3’ in the MAVProxy console to enable traceback Log Directory: Telemetry log: mav.tlog Waiting for heartbeat from 127.0.0.1:14550 MAV> online system 1 STABILIZE>
Mode STABILIZE fence breach GPS lock at 0 meters APM: APM:Copter V3.5.5 (88a1ecdd) APM: Frame: UNKNOWN APM: PreArm: RC Roll not configured APM: PreArm: Compass not calibrated APM: PreArm: 3D Accel calibration needed APM: PreArm: check firmware or FRAME_CLASS APM: PreArm:
Throttle below Failsafe Так как автопилот еще не откалиброван и до конца не настроен, то об этом красноречиво говорят и сообщения. В этом режиме можно общаться с автопилотом посредством команд. Если бы дрон был полностью настроен, то вот такая последовательность двух команд привела бы к старту двигателей и взлету дрона на высоту 20 м: arm throttle takeoff 20 Не откалиброванный автопилот не полетит, а покажет сообщения с причинами, почему он этого сделать не сможет.
Базовые принципы полета квадрокоптера
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Каждый квадрокоптер оснащен четырьмя винтами (квадро — четыре) постоянного шага. Под каждым винтом установлен небольшой двигатель коллекторного или бесколлекторного типа. Два винта совершают вращение против часовой стрелки, и два – по часовой.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
Видеотрансляция
Проверим как работает видеотрансляция в сети WiFi. Такой командой можно запустить видео в TCP-порт на Raspberry с использованием родной утилиты raspivid для камеры Raspicam: raspivid -t 0 -hf -fps 25 -w 640 -h 480 -o — | gst-launch-1.0 fdsrc ! h264parse !
rtph264pay config-interval=1 pt=96 ! gdppay ! tcpserversink host=0.0.0.0 port=5001 А вот такой командой делается тоже самое, только с использованием ранее скомпилированной обертки rpi-camsrc для gstreamer: gst-launch-1.0 rpicamsrc sensor-mode=4 ! h264parse !
rtph264pay config-interval=1 pt=96 ! gdppay ! tcpserversink host=0.0.0.0 port=5001 В обоих случаях, трансляция в формате h264 доступна по IP-адресу Raspberry на порту 5001.Посмотреть ее можно запустив на своем ПК такую команду (должен быть установлен gstreamer), вместо RPI_ADDRESS
указываем адрес Raspberry в сети:gst-launch-1.0 -v tcpclientsrc host=RPI_ADDRESS port=5001 ! gdpdepay ! rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=false В результате должно открыться окошко с видео.Практически в любую GCS встроен видеоплеер, который может показывать RTSP-видеопоток. Чтобы сделать из Raspberry RTSP-сервер можно использовать консольный плеер VLC. Установка:
sudo apt-get install vlc Видеотрансляция запускается так: raspivid -o — -t 0 -n -w 320 -h 240 -fps 25 | cvlc -vvv stream:///dev/stdin —sout ‘#rtp{sdp=rtsp://:8554/live}’ :demux=h264 Видео доступно по адресу (вместоRPI_ADDRESS, адрес Raspberry):
rtsp://RPI_ADDRESS:8554/live
Настройка GCS:
Адрес потока можно использовать для подключения нескольких плееров на разных устройствах, но, так как видеозахват и трансляция для Raspberry весьма трудоемкий процесс, то для нескольких потребителей видео лучше использовать внешний сервер (описание ниже).
Дрон не подключается к мобильному телефону или контроллеру.
Решение 1: Первое, что вам следует попробовать, — это сбросить Wi-Fi Anafi. Этот процесс не вернет ваш беспилотник к заводским настройкам, но он будет полностью обновлен. Вы можете сделать это, выполнив следующие действия.
- Во-первых, включите свой беспилотник.
- Нажмите и удерживайте кнопку питания в течение 8 секунд. Красные огоньки начнут включаться один за другим. Как только все 4 индикатора загорятся, можно безопасно отпустить кнопку.
- Затем WI-FI дрона перезагрузится. При перезагрузке он также создаст TXT-файл на microSD, в котором будет указан пароль WI-FI дронов.
- Давайте сразу перейдем ко второму решению для подключения Anafi.
- Во-первых, вам нужно будет выключить свой беспилотник, закрыть свой Skycontroller и отключить контроллер от вашего мобильного телефона.
- Затем вам нужно будет перезагрузить телефон и переключить его в режим полета. Убедитесь, что Bluetooth и Wi-Fi отключены.
- Теперь вам нужно будет настроить свой беспилотник так, как вы обычно делаете перед полетом.
- Но на этот раз используйте другой кабель при подключении Skycontroller 3 к вашему мобильному устройству.
- Если приложение FreeFlight 6 автоматически запускается после выполнения вышеуказанного, это означает, что соединение между приложением FreeFlight 6 вашего мобильного устройства и Skycontroller 3 было восстановлено.
- Если использование другого кабеля не удается, попробуйте удалить приложение FreeFlight 6 и переустановить его снова. Обновление на вашем телефоне могло повлиять на разрешения приложения. ВАЖНО, что этот шаг приведет к удалению всех имеющихся у вас носителей, для которых не была создана резервная копия.
Если это не сработает, есть другое решение, которое вы можете попробовать.
Решение 2: Это решение было опубликовано самими Parrot. Просто убедитесь, что вы создали резервную копию любого носителя. Это решение навсегда сохранит все файлы, включая носители на FreeFlight 6, которые не были скопированы. Поэтому убедитесь, что вы сделали резервную копию всего, что хотите сохранить!
Если после выполнения описанных выше действий он все еще не работает, попробуйте использовать другой мобильный телефон или даже Ipad. Если ничего, то проблема, вероятно, лежит немного глубже. Я бы рекомендовал обратиться в службу поддержки.
Видео
Зарядка квадрокоптера
Для зарядки аккумулятора дрона убедитесь в том, что квадрокоптер выключен. При нахождении батареи внутри батарейного отсека откройте его, выньте батарею, отсоединив провода, и подсоедините к идущему в комплекте зарядному устройству.

При включении устройства в сеть на нем загорится два индикатора. Красный сигнализирует о включении в сеть, а зеленый — о зарядке. Когда подключенная батарея полностью восстановит свой заряд, зеленый индикатор погаснет. После завершения зарядки не оставляйте аккумулятор включенным в сеть, так как это может привести к его преждевременному выходу из строя.

Узнать уровень оставшегося заряда дрона вам поможет пульт управления, а также и сам дрон. Если у последнего начинают мигать светодиоды, значит, нужно как можно скорее посадить его и поставить на зарядку во избежание падения с большой высоты. Если вы хотите всегда иметь под рукой заряженные аккумуляторы, можете кроме них самих приобрести и зарядное устройство с несколькими гнездами. К зарядному устройству из вашего комплекта также можно купить специальный кабель с разветвителями.

Пульт управления работает от батареек, которые обычно в комплект не входят. Приобретите четыре батарейки типа АА и вставьте их в пульт, соблюдая полярность. Обратите внимание, что в вашей модели может быть шесть отсеков для батареек, но два из них не содержат контактных пластин.

Как настроить и подключить квадрокоптер к телефону
Практически любые квадрокоптеры, кроме самых простых «детских» моделей, поставляются в комплекте с пультом управления. На последнем почти всегда предусмотрены дополнительные крепления, предназначенные для смартфона. При установке устройства в соответствующие гнезда управление происходит по-прежнему посредством пульта. Но при этом пользователь получает возможность наслаждаться видами с высоты, они выводятся на экран мобильного.
Подключение камеры квадрокоптера к телефону происходит следующим образом:
- устройство ставят в соответствующие крепления;
- скачивают фирменную утилиту для дрона в Google Play или App Store;
- устанавливают и запускают приложение при включенном пульте;
- следуют инструкции, которая выводится после запуска на экран, и осуществляют отладку программы в соответствии со своими потребностями.
Подключить смартфон к дрону реально только после установки Wi-Fi соединения. Утилита должна вывести сообщение о успешном окончании процесса. После этого можно запустить квадрокоптер с телефона и делать качественные снимки в полете.

Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
Прежде, чем заниматься ремонтом, по причине того, что не крутятся моторы, необходимо точно убедиться, что неисправен именно выход на мотор на полетном контроллере, именно это мы сейчас и сделаем.
Метод проверки прост и основывается на измерении уровня напряжения на всех четырех выходах на полетном контроллере и проверки, совпадают ли они.
Контроллер полета управляет регуляторами оборотов с помощью сигнала PWM (протоколы Oneshot и Multishot) или цифрового сигнала DShot.Обратите внимание, что мультиметры не умеют понимать такие сигналы. Но они могут работать как фильтр нижних частот и преобразовывать эти сигналы в показания напряжения, простыми словами, когда вы будете менять уровень газа (стик throttle, который слева на пульте), будет меняться и показания напряжения.
В идеале, напряжение на всех четырех выходах должно быть одинаковым.
Теперь перейдите во вкладку Motor в Betaflight Configurator и переместите ползунок на 2000 (100%). Измерьте снова напряжение, оно должно возрасти после того, как вы поднимете ползунок:
Для аналоговых сигналов, таких как PWM, Oneshot, Multishot — напряжение должно быть примерно 1,5V, когда газ находится на уровне 1000 (0%), а у DShot на этой же отметке будет 0.2V.
Когда газ будет на уровне 2000 (100%), напряжение для аналоговых сигналов будет выше 3V, в то время как у DShot будет около 0.4V.
Точная цифра не имеет значения, смысл в том, чтобы все одни были одинаковы на всех выходах. Если один из выходов выдает другое значение, которое отличается от других — этот выход неисправен.
Также бывает, что после прошивки один моторперестал крутиться, хотя до прошивки работал корректно. Это может произойти по нескольким причинам:
Для первого пункта, необходимо пару раз перепрошить регуляторы оборотов, бывает, что нормально работать начинают только со 2 или 3 раза. Подробнее о прошивке по ссылке выше, в синей рамке.
По второму пункту: видите скрин выше, вкладка Моторы? Отключите аккумулятора, но при этом не отключайтесь от Betaflight, затем поднимите ползунок Master вверх. Регуляторы начнут проигрывать звуки, после того как закончат, подсоедините аккумулятор и резко переведите ползунок в нижнее положение. Регуляторы оборотов снова начнут издавать звуки.
Если мотор не начал крутиться, повторите эти два пункта. У меня это срабатывает, думаю дело в разных регуляторах.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
- На пульте управления коптером находят кнопки или колесики, отвечающие за триммирование.
- Дрон запускают в работу и поднимают устройство в воздух отведением левого стика вниз.
- Набирают небольшую высоту и определяют, в какую именно сторону продолжает тянуть неисправный коптер.
- При наличии крена вправо триммируют дрон влево и наоборот.
- Проводят настройку до тех пор, пока устройство не начнет двигаться совершенно ровно.
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.

Настройка и запуск ardupilot
Релизы новых версий Ardupilot немного запаздывают в сборке от Emlid. Если необходимый функционал доступен в самой последней версии, то установить ее из исходников можно по этой инструкции.Разработчики Navio добавили в свою сборку простую и удобную утилиту Emlid tool для проверки датчиков и настройки Ardupilot. Сначала проверим, видит ли Raspberry контроллер Navio:
emlidtool info Если в ответ на эту команду выдает что-то вроде: Vendor: Emlid Limited Product: Navio 2 Issue: Emlid 2023-06-05 831f3b08594f2da17dccae980a2e3659115ef71f Kernel: 4.14.34-emlid-v7 RCIO firmware: 0xcaec2284 значит видит. Проверим состояние датчиков (покажет список и состояние): emlidtool test и драйвера ШИМ-контроллера в ядре Linux: cat /sys/kernel/rcio/status/alive 0 = не работает, 1 = работает.
Прошивка ШИМ-контроллера обновляется так:
sudo emlidtool rcio update Теперь настроим Ardupilot: sudo emlidtool ardupilot В терминале откроется текстовый GUI с пошаговыми менюшками. Выбираем copter последней версии, типarducopter, автозапуск при включении (On boot: enable), старт после настройки (Ardupilot: start).
Выходим через пункт меню Quit
Проверим запустился ли Ardupilot:
sudo systemctl status arducopter Обратите внимание, файл запуска в systemd называется arducopter, так как настроен был вариантcopter.
Теперь нужно настроить Ardupilot так, чтобы он отправлял нам телеметрию. Для этого отредактируем файл конфигурации:
sudo nano /etc/default/arducopter В нем должны быть такие строки: TELEM1=»-A udp:127.0.0.1:14550″ ARDUPILOT_OPTS=»$TELEM1″ Сохраняем файл (Ctrl X, затемY) и перезапускаем Ardupilot: sudo systemctl daemon-reload sudo systemctl restart arducopter Проверить состояние процесса Ardupilot можно такой командой: sudo systemctl status arducopter С такими настройками Ardupilot будет транслировать телеметрию (пакеты MAVLink)
Вместо локального адреса и порта можно записать IP-адрес ПК или планшета в локальной сети и пакеты будут транслироваться сразу туда.
Однако, такой подход оправдан, если данные телеметрии больше нигде не используются и у устройства с GCS статический IP адрес. Иначе каждый раз в настройках Ardupilot придется прописывать новый. Чтобы общаться с автопилотом по TCP могли одновременно несколько GCS с динамическими адресами и еще какие-нибудь скрипты на самом бортовом компьютере, удобнее использовать MAVProxy.
Этот скрипт (написан на Python) может получать пакеты MAVLink на локальный UDP-адрес и ретранслировать их на несколько локальных или удаленных IP-адресов как по UDP, так и по TCP. Пакеты передаются в обоих направлениях Ardupilot ⇔ GCS. Кроме того, MAVProxy представляет из себя полноценную GCS, но с текстовым интерфейсом.
Потеряна связь от передатчика к квадрокоптеру
Скорее всего он неправильно откалиброван. Установите беспилотник на ровной поверхности и разместите подкладку (сойдет картон или сложенная бумага) под луч, в чью сторону идет отклонение. После новой калибровки проблема должна исчезнуть. Если она все еще остается, возможно вашему квадрокоптеру все-таки требуется более серьезный ремонт.
Часто причина очень проста — ручка газа не стоит в положении минимум. Как вы понимаете, ремонт мультикоптера в данном случае не требуется. Все решается вами и достаточно быстро — установите ручку на себя до упора, устройтесь поудобнее и ждите полной инициализации квадрокоптера. Готово!
Если включение режима «эксперт» не помогает, то проверьте аккумулятор. Часто беспилотнику просто не хватает мощности для выполнения.
Это тот случай, когда вам как раз лучше сменить режим с «эксперта» на менее чувствительный. Если вы только приступили к управлению квадрокоптером, не беспокойтесь — не все сразу! По прошествии времени, когда вы лучше освоите управление, перейти на режим эксперта получится уже без особых проблем.
Часто это случается из-за того, что винты или двигатель установлены неправильно. Можно самостоятельно сравнить со схемой из руководства пользователя либо отнести беспилотник в сервис.
Самая печальная неприятность, которая часто означает потерю вашего летающего друга. Причины могут быть самыми разными, но способ предотвратить побег только один — установка GPS маячка.
Естественно, список на этом не заканчивается, мы указали только самые распространенные моменты. Кроме прочего, у каждой модели есть свои «болезни». Ремонт DJI Phantom, например, может потребоваться после падения даже с небольшой высоты, т.к. часто летит их слабое место — материнская плата.
Как мы все знаем, компания DJI делает качественные дроны в хорошем исполнении. Казалось бы от такого качества ремонта можно избежать на 100%. Но нет. Это вещь, и как любой другой вещи нужен уход. Собственно, квадрокоптеру тоже нужен уход. Основные поломки, которые у них могут встречаться – это:
- программные сбои и выход из строя;
- краши и падения дрона;
- следствия долгой эксплуатации;
- следствия износа;
- стики, на пульте управления не расположены по центру, а отклоняются;
- при получении SSID выдается ошибка;
- поломка камеры и других компонентов после падения;
- GPS навигация не срабатывает;
- падение дрона в воду;
- батарея не держит заряд и быстро садится;
- материнская плата повреждена, или ее отдельные компоненты;
- треснул или повредился пропеллер;
Если у вас есть поломка из списка выше, мой вам совет – делайте ремонт в сервисном центре или у частных мастеров. Не стоит этим заниматься самостоятельно, если вы в этом не разбираетесь.
В вашем городе наверняка есть такие люди, которые за небольшую плату произведут ремонт квадрокоптера DJI и у них наверняка есть необходимые детали и запчасти.
Если между машиной и ПДУ нет связи, в первую очередь проверяется пульт. Разряженный аккумулятор и севшие батарейки – распространенная причина отсутствия связи. Сигнализирует об отсутствии заряда в батарейках и загорающийся индикатор на коптере. В этом случае просто замените батарейку и оцените результат.
В некоторых случаях владелец аппарата неверно выполняет последовательность действий при запуске. Важно поэтапно и правильно соблюдать шаги, описанные в инструкции. К примеру: если на старте устройство лежит неправильно (на боку, перевернуто кверху вниз), оно не будет реагировать на пульт при команде подняться в воздух.
Если рекомендованные меры приняты, а аппарат по прежнему не видит пульт, проблема кроется внутри ПДУ. Возможно, нарушены контакты, имеется обрыв проводков. Иногда проблема решается чисткой контактов (в случае окисления батареек).
Неисправность, с которой приходится столкнуться почти каждому новичку. Винты запущены на полную мощь, а дрон не поднимается в воздух, не реагируя на ПДУ. Такое случается, если неправильно установлены пропеллеры. Не спешите нести технику в ремонт: сначала сравните маркировку на пропеллерах с маркировкой на лучах – совпадение знаков обязательно.
Возможно, случилась путаница: пропеллер, предназначенный для вращения по часовой стрелке, установлен на мотор, работающий против часовой стрелки (и наоборот). При неверном направлении винтов аппарат не взлетит. Поставьте пропеллеры в соответствии с маркировкой, и попробуйте запустить технику повторно.
Если при полете аппарат сносит в сторону, имеет место быть неверная калибровка. Чтобы решить проблему, поставьте квадрокоптер на ровную поверхность, подложив под отклоняющийся луч листы бумаги. Также подойдет и ровный лист картона. После повторной калибровки, как правило, проблема решается.
Если сваливание на бок после калибровки не прекратилось, а только уменьшилось, воспользуйтесь триммерами на пульте управления. Начинающие пользователи часто забывают о пилоте триммеров. Также, одна из распространенных ошибок у новичков — некорректная настройка гироскопа.
Отказ от взлета часто обусловлен неправильной установкой двигателя или винтов. Еще раз внимательно осмотрите маркировку каждой детали – если замечено несовпадение, проведите разбор и установку в соответствии со схемой в инструкции.
Режимы полета
В моделях Syma X8C, X8G, X8W, X8HC, X8HG, X8HW предусмотрено несколько полетных режимов. При нажатии левой кнопки на торце пульта управления вы можете переключить дрон между медленной и быстрой скоростями (расходниками). По умолчанию стоит медленная скорость, так как без опыта пилотирования дрона не рекомендуется переходить на большую скорость.
При переключении на вторую скорость квадрокоптер выполняет команды резче и быстрее, поэтому переходите на нее после получения хороших навыков управления. Медленная скорость хороша в небольших пространствах или при выполнении точных маневров, а быстрая — на большой открытой местности. На пульте данные режимы обозначаются буквами L (низкая скорость) и H (высокая скорость).

Другой полетный режим называется Headless и вызывается по нажатию и удержанию в течение двух секунд этой же кнопки на торце. Если вы отвернетесь от дрона или он перевернется по отношению к вам на 180 градусов, движение стика влево будет вызывать полет вправо.

Еще один режим включается по нажатию кнопки на торце пульта справа. Это переворот квадрокоптера на 360 градусов. Так как для переворота понадобится место, рекомендуется поднять дрон на высоту от трех метров. После этого нажмите кнопку переворота и потяните правый стик в любую сторону.
Ремонт двигателя syma x5c
Мы бы советовали не тратить время и сразу обращаться за советом к мастерам. Но если вы уверены в себе (или, давайте честно, вам просто очень интересно), то можете проверить провода и контакты — если с ними все в порядке, то отправляйтесь в сервис. Дело может быть как в сгоревшем двигателе, так и в регуляторе скорости.
Снимите крышку корпуса, чтобы проверить, если ли проблема разъемами и соединением. Если что-то отсоединилось, то можно просто припаять проводок на место. Если же таких неполадок не выявлено, то нужно менять материнскую плату или какой-либо из двигателей коптера.
На каждом квадрокоптере есть две пары разных по работе двигателей — одни совершают движение по часовой стрелке, а другие — против. На модели X5C они очень легко различимы по цветам проводов. Те, что крутятся по часовой стрелке синие и красные провода, против часовой — белые и черные.
[affegg id=45]
Новые запчасти можно найти в интернете. Для Syma X5C они не будут стоить дорого. Останется только дождаться детали. Ускорить доставку можно, заплатив курьерской службе.
Когда у вас будут все необходимые детали, проверьте наличие инструментов и других материалов, которые вам также понадобятся при ремонте:
- Отвертка;
- Кусачки;
- Паяльник;
- Вольтметр;
- Олово, свинец, смола для пайки;
- Запасные части для замены неисправных компонентов;
При замене моторов вы должны обратить внимание на полярность моторов. Нужно припаять провода двигателя к плате приемника в следующем порядке:
- Двигатель M1 (против часовой стрелки) — от белого до M1 и черный M1-
- Двигатель M2 (по часовой стрелке) — Красный к M2 и синего М2-
- Двигатель M3 (против часовой стрелки) — от белого до M3 и черный M3-
- Мотор M4 (по часовой стрелке) — Красный к M4 и синего до М4-
После того как вы припаяли обратно новые моторы, включите квадрокоптер, чтобы увидеть, если все двигатели вращаются свободно и правильно. Если все в порядке, то смело завинчивайте обратно все болты корпуса и наслаждайтесь полетами.
Советы по устранению неполадок подключения wi-fi дрона, которые нужно попробовать в первую очередь
Обычно, когда WI-FI-соединение вашего дрона не подключается, относительно просто выяснить, что произошло, потому что все эти проблемы с подключением так тесно связаны. Вот некоторые из наиболее распространенных советов по устранению неполадок, которые помогут решить проблему с подключением как можно скорее.
- Удалите и переустановите приложение дрона на свой телефон. Часто, когда ваш мобильный телефон обновляется, это может повлиять на разрешения ваших приложений.
- Попробуйте подключиться к другому телефону. Это быстрый способ определить, проблема ли с вашим дроном или телефоном.
- Попробуйте использовать Ipad. Я читал о случаях, когда Ipad может использовать более высокие частоты WI-Fi по сравнению с вашим мобильным телефоном. Если это сработает, то, скорее всего, ваш телефон не поддерживает частоту WI-Fi дронов.
- Вы можете попробовать сбросить WI-Fi своих дронов. Если все вышеперечисленное не удастся, это может быть проблемой с WI-Fi дронов. Лучший первый шаг — попытаться сбросить его. Я подробно изложил это в остальной части статьи.
- Чтобы обойти Wi-Fi, подключите телефон к контроллеру с помощью прилагаемого USB. если это возможно, некоторые дроны не позволяют подключить ваш мобильный телефон к контроллеру с помощью USB. Но если у вас есть такая возможность, попробуйте!
- Проверьте, отключается ли ваш беспилотный WI-Fi во время жесткой посадки. Во время жесткой посадки ваши дроны могли отключить WI-Fi. Я видел эту проблему с дроном ProMark p70, в котором камера, содержащая WI-Fi, отключалась от сети.
Если эти общие советы не сработали, проблема, вероятно, является общей проблемой с подключением дрона из-за неисправного производства или чего-то в этом роде. Я составил список всех наиболее распространенных проблем с подключением, которые я мог найти в интернете. Продолжайте читать!
Управление квадрокоптером через смартфон
Управление беспилотным летательным аппаратом со смартфоном не так сложно, как может показаться на первый взгляд. Использование компактного мобильного устройства в качестве пульта дистанционного управления прекрасно подходит как опытным пользователям, так и тем, кто только что приобрел беспилотный летательный аппарат с камерой.
Нет существенной разницы между управлением с помощью пульта дистанционного управления или смартфона. Дело в том, что при использовании компактного гаджета рычаги и другие элементы будут визуально отображаться на экране. Сенсорное управление может быть неудобным для людей, которые редко пользуются современными гаджетами или вообще не знакомы с ними.. Но после нескольких сеансов вы быстро привыкаете к такому контролю.
Для управления беспилотником необходимо подключиться, открыть приложение и запустить определенные функции с помощью виртуальной панели на экране. Изображение будет передаваться в режиме реального времени. С помощью приложения вы можете вывести беспилотник в воздух, приземлиться, запустить камеру и выполнить другие действия.
Для начала поднимите гаджет беспилотника не слишком высоко и постарайтесь управлять им там, чтобы не повредить устройство, упав с большой высоты.

При использовании смартфона в качестве пульта дистанционного управления, есть некоторые правила, которым необходимо следовать. Помните, что диапазон сигналов не неограничен. Это зависит от модели и мощности беспроводной карты. Средний диапазон варьируется от 50 до 100 метров. При использовании дорогостоящих беспилотных летательных аппаратов стоимость диапазона может быть значительно выше.
При записи или отображении видео высокого разрешения экран смартфона может быть перегружен. Изображение может быть сильно сжато, что влияет на качество изображения. Кроме того, изображение может быть медленным, с шумом и заморозками. Помните, что в дополнение к рычагам управления телефон также отображает наклон, высоту, уровень заряда батареи и другие данные.
Сигнал Wi-Fi является универсальным методом, который используется для синхронизации устройств различных типов. Помехи могут мешать работе беспилотника, так как очень легко заглушить сигнал. Связь с беспилотным летательным аппаратом может быть прервана, что приведет к его падению или потере.

Управление квадрокоптером syma x8
Изучение всех кнопок и обозначений пульта поможет вам не потеряться во время полета. На пульте есть несколько кнопок: по центру расположена кнопка включения устройства, на торце справа кнопка выполнения флипов (трюков), на торце слева кнопка переключения скоростных режимов (расходников)

Левый стик (рычажок), называемый также стиком газа, обеспечивает подъем и снижение дрона (двигаем стик вверх и вниз), а также его вращение (стик влево или вправо). Правый стик помогает передвинуть дрон вперед, назад, вправо или влево. Переключатели (триммеры) рядом со стиком (кроме левого верхнего) нужны для того, чтобы настраивать дрон при появлении у него крена в ту или иную сторону.

Левый верхний переключатель помогает сделать фото или видео. Когда вы переведете переключатель вверх, раздастся один звуковой сигнал и загорится красный светодиод на дроне, извещая вас о созданном снимке. Перевод переключателя вниз запустит видеозапись и будет сопровождаться двойным звуковым сигналом и миганием индикаторов. Для остановки записи также нажимайте рычажок вниз. Без нажатия видео может не сохраниться.

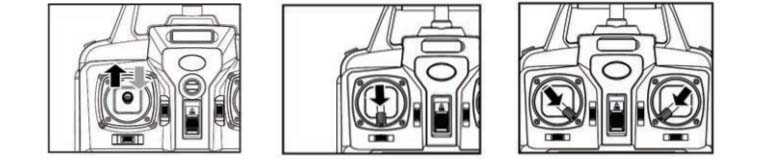
Для запуска дрона включите его при помощи кнопки питания на обратной стороне корпуса. В момент включения на квадрокоптере будут мигать индикаторы, что говорит об отсутствии связи с пультом управления. Чтобы эту связь установить, включите пульт и нажмите левый стик вначале вверх, а затем вниз. При этом индикаторы на дроне станут светиться постоянно, что говорит об успешной привязке.

Теперь вам нужно научиться запускать и останавливать двигатели дрона. Первый способ сделать это — перевести левый стик вверх для запуска и вниз с удержанием для остановки моторов. Второй способ — это оба стика потянуть в нижние углы друг к другу. То же самое движение приводит и к остановке мотора.
Если это ваш первый опыт управления квадрокоптером, попробуйте запустить двигатели, поднять и посадить дрон, передвигая стики очень плавно. Но проводите полет только в безветренную погоду в большом свободном пространстве, например, на пустыре, где рядом нет никаких помех, нет людей и животных, которые могут пострадать от неумелого управления дроном или повредить сам квадрокоптер.
Часть 2 : как включить трансляцию при использовании масштабирования?
Zoom не дает вам прямого доступа к трансляции во время или перед встречей. Лучше всего сделать это самостоятельно, пошагово используя следующий метод.
Шаг 1:Войдите или зарегистрируйтесь в Zoom.
Шаг 2:Откройте приложение и войдите на встречу с определенным паролем.
Шаг 3:Как только вы окажетесь внутри,Поделиться экраномКнопка появится в меню ниже.
Шаг 4:Просто нажмите эту кнопку, чтобы открыть новое окно.
Шаг 5:Проверьте и переключите вариант iPhone или iPad.
Шаг 6:Установите плагин, следуя инструкциям на экране (только в первый раз).
Шаг 7:Теперь откройте центр управления устройством, используя определенные ярлыки или настройки просмотра.
Шаг 8:Найдите зеркальное отображение экрана и нажмите эту кнопку.
Шаг 9:Он откроет всех пользователей Zoom или других устройств с зеркальным отображением трансляции вокруг вас.
Шаг 10:Выберите имя Zoom, которое начнет зеркально отображать ваш экран при увеличении.
Имейте в виду, что оба устройства должны быть подключены к одному Интернету при выполнении описанного выше процесса. Экран будет виден только вам, и вы можете управлять обоими устройствами из одного места.
Чтобы прекратить совместное использование экрана, вы можете просмотреть центр управления своего телефона и нажать кнопку «Прекратить совместное использование». Кроме того, вы можете использовать экран масштабирования, чтобы прекратить совместное использование экрана.

