

- Механическое триммирование.
- Настройка
- Настройте вертолет на максимальную послушность и управляемость.
- Поворотный механизм
- Подвес, аккумулятор и стойки
- Полетный контроллер crius lite
- Программное обеспечение
- Регуляторы скорости, моторы и пропеллеры
- Системы автоматического триммирования | авиация – коммерческая, гражданская, спецавиация…
- Триммирование при помощи пульта управления.
- Заключение
Механическое триммирование.
Сделав пробный взлет, мы обнаружили, что вертолет сильно тянет в одну из сторон, несколько перемещений индикатора триммера не исправило ситуацию, тогда вернем триммер в нулевое положение и приступим к механическому триммированию модели.
Изменим длину тяги от сервопривода до тарелки автомата перекоса, подкрутив соответствующий регулятор совсем немного. Помните, что регулировать необходимо по-немногу, каждый раз проверяя результат. Основные действия должны заключаться в следующем:
- Если вертолет уходит вперед – снимите правую тягу, вращая наконечник тяги против часовой стрелки удлините ее немного и поставьте обратно.
- Если вертолет уходит назад – снимите правую тягу, вращая наконечник тяги по часовой стрелке укоротите ее немного и поставьте обратно.
- Если вертолет уходит влево – снимите левую тягу, вращая наконечник тяги против часовой стрелки удлините её немного и поставьте обратно.
- Если вертолет тянет вправо – снимите левую тягу, вращая наконечник тяги по часовой стрелке укоротите ее и поставьте обратно.
Удлинение и укорачивание тяг производите плавно и проверяйте результат, порой достаточно повернуть наконечник на несколько градусов, чтобы добиться нужного результата.После каждого действия с регулировкой, запускайте модель и проверяйте ее поведение в воздухе. Повторите указанные выше пункты несколько раз, чтобы добиться необходимого эффекта и стабильного полета.
Настройка
Открываем через Arduino IDE скетч-прошивку. Вся конфигурация описана в файле config.h (подробнее о большинстве параметров и настройках можно прочитать
, в данной статье многие мелочи опущены). Для трикоптера выставляем тип рамы #define TRI, тип платы датчиков #define CRIUS_LITE и фильтр для гироскопа #define ITG3200_LPF_42HZ. А теперь в настройках Arduino IDE выбираем любую 328p ардуинку и заливаем полученный скетч.
Запускаем MultiWiiConf для вашей системы.

Так как наш поворотный механизм использует серву, у которой есть свойства сгорать при сильных нагрузках, то лучше узнать и установить пределы отклонений сервы. Для этого стиком YAW на пульте управления отклоняйте серву влево и вправо и запомните максимальное и минимальное значение SERVO в её крайних положениях, после чего введите эти значения в файле config.h
/* you can change the tricopter servo travel here */
#define TRI_YAW_CONSTRAINT_MIN 1340
#define TRI_YAW_CONSTRAINT_MAX 1855
И заново загрузите скетч в контроллер. Теперь можно попробовать взлететь, но учтите, что коптер будет вращаться, поэтому оттримируйте канал YAW на пульте, чтобы не было вращений при взлете и полетах, а потом снова зайдите в MultiWiiConf, посмотрите это значение в поле SERVO и поменяйте его в
#define TRI_YAW_MIDDLE 1630 // tail servo center pos. - use this for initial trim; later trim midpoint via LCD
ВНИМАНИЕ! В новой прошивке (2.0 и выше) подобное триммирование сделано через LCD экранчик или терминал, если у вас нет ни того ни другого, то придется немного поменять код в Output.ino
#ifdef TRI
motor[0] = PIDMIX( 0, 4/3, 0); //REAR
motor[1] = PIDMIX(-1,-2/3, 0); //RIGHT
motor[2] = PIDMIX( 1,-2/3, 0); //LEFT
servo[5] = constrain(TRI_YAW_MIDDLE YAW_DIRECTION * axisPID[YAW], TRI_YAW_CONSTRAINT_MIN, TRI_YAW_CONSTRAINT_MAX); //REAR
#endif
Готовый файл конфигурации для моего трикоптера
Настройте вертолет на максимальную послушность и управляемость.
Большинство моделей проходят первоначальную настройку и способны полететь из коробки, но если при полете вертолет отклоняется (тянет) в сторону – необходимо произвести его настройку.
Причем настройку нужно производить оторвавшись на 50 см и выше от земли, иначе вертолет будет тянуть на воздушной подушке, создаваемой винтами. Только поднявшись выше эффект воздушной подушки сойдет на нет и модель можно настроить для плавного зависания.
Пример триммирования 4-х канального вертолета будет осуществляться на модели WL Toys V911. Вертолет V911 имеет классическую схему винтов и фиксированный шаг лопастей основного ротора. Данная модель оборудована двумя сервоприводами:
- Сервопривод справа – элеваторный – «тангаж» (отвечает за движение модели вперед и назад)
- Сервопривод слева – элеронный – «крен» (отвечает за полеты боком, наклоны («крены») влево и вправо).
Перед самим процессом триммирования необходимо разобраться, какие рычаги пульта управления отвечают за движение сервоприводов и поведение модели в полете (пример для режима Mode 2 – самый распространенный):
- Правый рычаг пульта (называемый также «стик») вверх (полет вперед) – правый сервопривод опускается.
- Правый рычаг пульта вниз (полет назад) – правый сервопривод поднимается.
- Правый рычаг пульта влево (крен, полет влево) – левый сервопривод опускается.
- Правый рычаг пульта вправо (крен, полет вправо) – левый сервопривод поднимается.
С принципом управления и движением сервоприводов Вы ознакомлены, теперь можно приступить к процессу триммирования.
Разделим весь процесс триммирования вертолета на пункты:
- Первым делом включаем вертолет и пульт управления и выставляем на пульте управления положения триммеров по центру (в нулевое значение) – на модели V911 индикация положения триммеров отображается на экране пульта, поэтому это сделать не сложно, в ряде других моделей индикация отсутствует, но тогда переключение триммеров сопровождается звуковыми сигналами и центральное «нулевое» положение имеет более продолжительный сигнал.
- Запускаем вертолет и поднимаемся от пола на 50 см вверх, пытаясь удержать вертолет в одном положении. Классическая схема винтов менее послушна в зависании, но понять хорошо ли настроен вертолет можно, понаблюдав держится ли вертолет в одной области или летит постоянно в одну из сторон.
- Если для удержания вертолета в одном положении Вам приходится прибегать к правому рычагу пульта управления (который напоминаю регулирует движение полета вертолета вперед, назад, влево, вправо) –значит модель необходимо настроить (триммировать).
- Существует два типа настройки триммирования – механическая настройка сервоприводов путем изменения длины тяг от сервопривода до тарелки автомата перекоса и электронное триммирование с помощью пульта.
- Если вертолет сильно тянет в сторону, то желательно сначала произвести механическое триммирование, а потом произвести тонкую донастройку с помощью пульта, если же отклонение вертолета в полете незначительное – то можно воспользоваться сразу электронным триммированием.
- Выбирать какое применить триммирование Вам – основной принцип таков – если электронное триммирование требует перевести положение триммера практически в крайние положения – лучше произвести сначала механическую настройку, если же требуется 2-5 смещений электронного индикатора – достаточно триммирования на пульте управления.
Итак, Вы включили вертолет, взлетели на пол метра от земли или ровной поверхности и если вертолет держится в одной области достаточно ровно, не тянет в одну из сторон, тогда триммировка не нужна и можно приступать к полетам. Если же вертолет постоянно уходит в одну из сторон, приступим:
- Если вертолет уходит вправо или влево – необходимо воспользоваться триммером левого сервопривода и регулировать по крену.
- Если вертолет уходит вперед или назад – необходимо воспользоваться триммером правого сервопривода и регулировать по тангажу.
- Если вертолет уносит в двух направлениях (одновременно смещается и по крену и тангажу) – необходимо одновременное регулирование обоих триммеров.
Поворотный механизм
Самое сложное и проблемное место трикоптера — это поворотный механизм заднего мотора, служащий для компенсации вращения, а так же для поворота. Вот как раз из-за него долго не решался строить «трешку», а очень хотелось в виду экономичности и возможности легко складывать раму для транспортировки. Как и в статье Девида, я взял

А вот с сервой вышла ошибка (хотел немного поэкономить, а пришлось покупать два раза), поэтому первый вариант механизма получился довольно большим и тяжелым.

Поэтому рекомендую сразу брать серву BMS-385DMAX, указанную
Заметьте, чтобы стяжка, держащая поворотный механизм не слетела, следует немного отогнуть профиль. Так же рекомендую прикрутить небольшую деревяшечку в углубление белого блока механизма, а так же использовать 2х сторонний скотч или клей.

Подвес, аккумулятор и стойки
Подвес в данном случае это просто фанерка, вырезанная под ширину аккумулятора. На фанерку клеится
(другая часть на аккумуляторе) и заодно продевается
для надежного крепления аккумулятора.

К подвесу через стяжки прикреплены
, к раме так же на стяжках приделаны другие силиконовые трубочки, а потом скрепляются между собой для гашения вибрации на камере.

Чтобы коптер не приземлялся на батарейку (что крайне опасно), из остатков текстолита можно выпилить 3 небольших прямоугольника и, просверлив в них отверстия, закрепить на лучи стяжками.
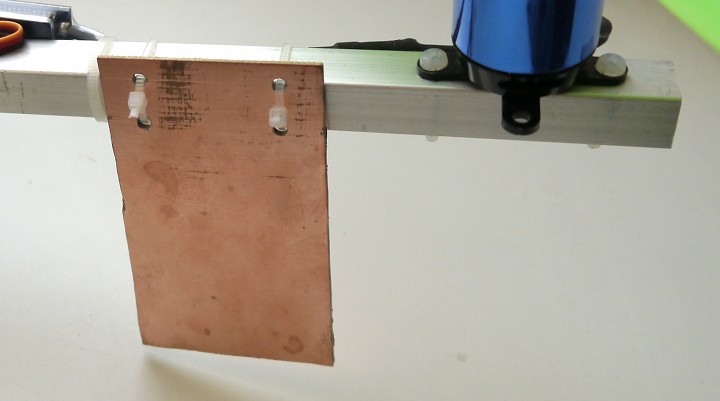
При относительно жестком приземлении стяжки отваливаются, гася большую часть энергии падения, поэтому аккумулятор не страдает (проверено в падении с 7 метров об асфальт).
Полетный контроллер crius lite
Не так давно на сайте goodluckbuy появился очень дешевый полетный контроллер с atmega328p и набором датчиков: гироском акселерометр для
и дополнительные барометр и компас для
. Lite версию взял по двум причинам: цена (на момент покупки разница была в 2 раза) и бессмысленность других датчиков (курс прекрасно держит и без компаса, а удержание высоты с прыжками -2 метра на датчике bmp085 меня не вдохновляют).
После покупки рекомендую отковырять всё лишнее и пополоскать платку в спирте, так как почти всем китайцы оставили много токопроводящей грязи которая замыкает контакты и может просто убить контроллер.

Крепим плату и сопутствующее оборудование (приемник) к раме с помощью
. Держит очень прочно, а заодно и вибрации немного устраняет. (только антенну не крепите так, если собираетесь далеко летать).
Вес коптера около 800 грамм, время полета с 2.2Ah аккумулятором и камерой до 200 грамм около 10 минут, при этом запаса мощности еще около 40-50%.
На этом железная часть заканчивается и начинается игра с софтом.
Программное обеспечение
После первого подключения платы выяснилось что залитая прошивка довольно старая, да еще и с перепутанными осями датчиков, т.е. летать на такой можно даже и не пытаться. Поэтому скачиваем
(не качайте dev!), а еще лучше
с кучкой улучшений.
Регуляторы скорости, моторы и пропеллеры
По традиции (да и в наличии дома было) регуляторы скорости
и моторы
. Регуляторам скорости пришлось удлинить провода питания, чтобы удобно вывести
, да и чтобы достало до
. И конечно надо немного изменить настройки регуляторов скорости, включив Brake, увеличив Timing до High и убрав плавное ускорение (на разных регуляторах скорости различные параметры, но в целом ставить всё так, чтобы было быстрее).
, согласно вращениям моторов: передний левый вращается по часовой стрелке, передний правый против часовой, а задний в зависимости от ваших настроек (напоминаю что для смены направления вращения достаточно поменять любые 2 провода от регулятора скорости до мотора местами).
Системы автоматического триммирования | авиация – коммерческая, гражданская, спецавиация…
Устройства, служащие для автоматического снятия усилий в системах управления рулями и элеронами, получили название систем автоматического триммирования, или автоматов триммирования. Такое название объясняется тем, что для снятия усилий в настоящее время обычно используются триммеры. Принципиально для этих целей можно использовать также передвижной стабилизатор. Однако такой метод более затруднителен для практической реализации.
Как было показано в предыдущем параграфе, существует ряд причин, вызывающих перебалансировку самолета. Поэтому построение системы автоматического триммирования по принципу компенсации возмущений оказывается весьма сложным. Существенно проще построить систему автоматического триммирования по принципу компенсации отклонения. В таком случае нужно лишь измерять и компенсировать усилия в системе управления независимо от породивших их причин.
На рис. 3.107 представлена блок-схема автомата триммирования, работающего по принципу измерения и компенсации усилия в системе управления. В одну из тяг системы управления вмонтирован динамометрический датчик, с выхода которого снимается элек-
|

грический сигнал, пропорциональный усилию, воспринимаемому датчиком. Этот сигнал поступает в управляющее устройство. Отсюда после преобразования, усиления и прохождения цепи задержки эн подается на электромеханизм триммера — триммерную «ашинку. Основной элемент цепи задержки — реле времени, которое срабатывает через несколько секунд после появления сигнала. Ток к электромеханизму триммера поступает только в том случае, когда продолжительность действия усилия в тяге больше времени задержки. Благодаря этому автомат триммирования снимает только длительно действующие усилия, вызванные перебалансировкой самолета, и не реагирует на кратковременные являющиеся результатом управляющих отклонений руля высоты.
Вообще говоря, в системе автоматического триммирования можно обойтись без цепи задержки, играющей в данном случае роль фильтра низких частот. Дело в том, что таким фильтром является сам электромеханизм триммера. Если с помощью рёдуктора сделать скорость отклонения триммера небольшой, то при кратковременных нагрузках в системе управления триммер не будет заметно отклоняться. Однако при отсутствии специальной цепи задержки электромеханизм отрабатывает каждое сколько-нибудь значительное колебание усилий в системе управления, непрерывно работая в режиме реверса. Очевидно, что работа электромеханизма в таком режиме нежелательна. Избежать этого можно не только путем установки цепи задержки, но и подбором соответствующего порога чувствительности усилителя, питающего электромеханизм триммера. Однако в этом случае в системе остаются некоторые усилия, величина которых определяется порогом чувствительности усилителя.
При выборе времени задержки приходится сталкиваться с противоречивыми требованиями. С одной стороны, желательно увеличивать это время, поскольку облегчается работа системы автоматического триммирования, особенно при полете в турбулентной атмосфере. С другой стороны, увеличение времени задержки Приводі!! к накапливанию усилий в системе управления. Это может, во-первых, привести к наличию усилий на штурвале при отключении автопилота на переходных режимах и, во-вторых, к ухудшению динамики системы управления триммером. Задавшись допустимым остаточным усилием на штурвале и зная скорость нарастания усилии в системе управления, можно рассчитать максимально допустимое 224
Рис. 3.108. Блок-схема системы автоматического триммирования без динамометрического датчика:
 / — штурвал; 2 — руль высо-
/ — штурвал; 2 — руль высо-
ты; 3 — триммер
время задержки. Обычно в системах автоматического триммирования, устанавливаемых на пассажирские самолеты, оно не превышает 5—6 сек.
Скорость отклонения триммера желательно делать возможно ‘ меньшей. Однако она должна быть достаточной для того, чтобы своевременно снимать усилия, появляющиеся в системе управления. Учитывая (3.178), скорость отклонения триммера
На режимах захода на посадку потребные скорости отклонения триммера обычно не превышают нескольких десятых градуса в секунду.
Наряду е автоматами триммирования, построенными по рассмотренной схеме, широкое распространение нашли автоматы, не имеющие динамометрического датчика (рис. 3.108). В таком слу — . чае сигнал, пропорциональный усилию в системе управления, бе — І рется с выхода усилителя рулевой машинки автопилота.
В автоматическом полете шарнирный момент уравновешивается моментом рулевой машинки. При этом направление и величина момента рулевой машинки находятся в определенной функциональной зависимости от знака и величины тока на выходе ее усилителя. Следовательно, знак и величина выходного тока усилителя находятся во взаимосвязи с усилием в системе управления. Поэтому выходной сигнал усилителя в определенной мере является аналогом ■ сигнала динамометрического датчика усилий.
Очевидным достоинством этой системы автоматического трим — !‘мирования является отсутствие необходимости установки в систе — |Му управления рулем высоты динамометрического датчика усилий. Зместе с тем подобные системы предъявляют дополнительные тре — ’звания к характеристикам выходного сигнала усилителя рулевых ЙГіашинок автопилота, которые не всегда могут быть удовлетворены.
/чевидно, что автомат триммирования такого типа может работать |только в комплексе с автопилотом.
Для сравнения укажем, что автоматы триммирования, постро — Цбнные по первой схеме (см. рис. 3.107), могут работать автономно |Ьт автопилота. В частности, они могут быть использованы для так

зазываемого полуавтоматического триммирования. В этом случае в цепи между управляющим устройством и электромеханизмом триммера устанавливают переключатель режима работы «Автомат— полуавтомат» (рис. 3.109). Когда переключатель находится в положении «Автомат», система работает так же, как система, изображенная на рис. 3.107. В положении «Полуавтомат» питание на электромеханизм триммера поступает только при нажатии кнопки, устанавливаемой на штурвале. Режим полуавтоматического триммирования предназначен для использования при выключенном автопилоте. Управляя самолетом вручную, летчик нажимает на кнопку, когда возникает необходимость снять накопившееся усилие в системе управления. После снятия усилия кнопку необходимо отпустить. Если этого не сделать, то система работает в режиме автоматического триммирования. Это может привести к существенному, часто к недопустимому изменению характеристик устойчивости и управляемости самолета. При нормальной работе системы автоматического триммирования постоянно действующие усилия в системе управления не должны превышать некоторого небольшого порогового значения. Наличие в системе управления больших усилий, действующих продолжительнее времени задержки, свидетельствует о неисправности автомата триммирования или автопилота. Этот факт может быть использован для сигнализации неисправности и отключения автомата триммирования и автопилота. Датчик сигнала неисправности может быть выполнен на базе реле времени. Величина задержки этого реле должна превышать время задержки сигнала в цепи электромеханизма автомата триммирования.
Такой способ контроля работы систем автоматического триммирования в основном применяется в системах, не имеющих динамометрического датчика усилий. В системе автоматического триммирования с динамометрическим датчиком для контроля исправности используется специальное контактное устройство, имеющееся в датчике. Такое контактное устройство имеется, например, в датчике усилий типа ДДУ, используемом в автомате триммирования типа АТ-2, который входит в состав бортовой системы автоматического управления БСУ-ЗП. Оно представляет собой две пары контактов, которые размыкаются при действии на датчик усилий определенной величины, так называемых предельных усилий. При сжатии датчика размыкается одна пара контактов, при растяжении — другая. Сопоставляя знак сигнала контактного устройства со знаком сиг — 226
нала, снимаемого с индукционного датчика ДДУ, оказывается возможным построить логи — гическую систему контроля работы автомата триммирования.
 Для информации летчика об усилиях в системе управления служат указатели усилий (индикаторы нагрузок). На ряде самолетов их устанавливают не только в канал высоты, но и в каналы крена и направления. Нарис. 3.110 показан комбинированный индикатор
Для информации летчика об усилиях в системе управления служат указатели усилий (индикаторы нагрузок). На ряде самолетов их устанавливают не только в канал высоты, но и в каналы крена и направления. Нарис. 3.110 показан комбинированный индикатор
нагрузок ИН-3, входящий в состав бортовой системы САУ-1Т.
Подвижный индекс указателя усилий в системе руля направления Н выполнен в виде вертикальной риски. При наличии усилий он отклоняется влево или вправо в зависимости от знака усилия. Индекс указателя усилий в системе управления элеронами обозначен буквой К (крен). При наличии усилий в этой системе индекс накреняется, поворачиваясь вокруг центра. Направление крена индекса также зависит от знака усилия. Подвижный индекс указателя усилий в системе управления рулем высоты обозначен буквой Т (тангаж). Он может отклоняться вверх и вниз. В некоторых автоматах триммирования вместо указателя усилий используют две сигнальные лампы. Когда усилие в системе управления превышает некоторый предел, загорается одна из ламп в зависимости от знака усилия.
ГЛАВА 4
Триммирование при помощи пульта управления.
Механическое триммирование можно прекратить добившись хорошего, но не отличного результата – более тонкую настройку стабильности зависания можно добиться при помощи триммирования с пульта управления.
Триммирование с пульта управления также начинается с пробы взлета и поднятия на высоту от 50 сантиметров.
Настройка триммирования производится при помощи специальных переключателей на пульте, расположенных сбоку и снизу от рычагов (стиков). Нам нужен правый рычаг и переключатели слева и снизу от него. Слева переключатель отвечает за тангаж (полеты вперед, назад), снизу – крен (полеты, крены влево, вправо)Для регулировки вертолета произведите следующие действия в зависимости от поведения вертолета:
- Если вертолет уносит вперед – переключите триммер тангажа вниз (переключатель находится слева от правого рычага). Переключайте триммер вниз несколько раз до стабильного удержания и исключения полета вперед без рычага.
- Если вертолёт уносит назад – переключите триммер тангажа вверх (переключатель находится слева от правого рычага). Переключайте триммер вверх несколько раз до стабильного удержания и исключения полета назад без рычага.
- Если вертолёт уносит влево – переключите триммер крена вправо (переключатель находится снизу правого рычага). Переключите триммер вправо несколько раз до стабильного удержания модели и исключения полета влево без рычага.
- Если вертолёт тянет вправо – переключите триммер крена влево (переключатель находится снизу правого рычага). Переключите триммер влево несколько раз до стабильного удержания модели и исключения полета вправо без рычага.
Повторите указанные выше рекомендации для выравнивания модели в воздухе и наслаждайтесь полетом.
Заключение
На самом деле при постройке и настройке будет много непонятного и интересного. Но занятие авиамоделизмом затягивает, а занятие коптерами затягивает в двойне, особенно если вы программист и есть желание улучшить код одного из open source проектов.
И в заключении видео недавнего полета, во время которого коптер сильно пострадал, но был быстро отремонтирован тут же на поле (спасибо стяжкам и пластиковым болтам).
Съемка велась с 2х аппаратов: квадрокоптер с камерой GoPro и мой трикоптер с бортовой FPV камерой, картинка с которой записывалась на земле на старую miniDV камеру.
ps: если есть какие то вопросы — задавайте, буду обновлять статью по мере возможности.