

- Проверьте пропеллеры
- Конфигурация пропеллеров
- Описание fast-f4
- Какие бывают размеры пропеллеров
- Механические проблемы
- Проверьте схему двигателей (mixer)
- Калькулятор ecalc
- Шаг пропеллера
- Балансировка пропеллеров с помощью подручных средств
- Третий вариант
- Rashvinta
- Методы установки
- Материал пропеллеров
- Пластик и карбон: где качество и эффективность
- Схема установки пропеллеров
- №6 проверьте приемник
- Спецификация и характеристики
- Материал
- Рекомендации по выбору пропеллеров и заключение
- Основные понятия
- Основное
- Пропеллер
- Технические характеристики
- Количество
- Виды лопастей
- В первом варианте
- Качество
- №8 настройте failsafe
- Заключение о сложности процедуры
- №11 проверка fpv системы
- Что в комплекте?
- Регулятор
- №9 откалибруйте регуляторы оборотов (esc)
- Что нужно знать: основные определения и понятия
- Во втором варианте
- Аккумулятор
- Деформация лучей
- Мотор
- Эластичность
Проверьте пропеллеры
Правильно ли установлены пропеллеры? Квадрокоптер — это рама и 4 двигателя, от слова КВАДРО. Для правильного полета 2 двигателя должны крутиться по часовой стрелке и 2 против часовой.
Для удобного восприятия — просто запомните, что двигатели крутятся «внутрь» дрона.
На изображении выше хорошо видно кромку лопасти, которая будет цепляться за воздух.
Всегда снимайте пропеллеры, когда выполняете ремонт или настройку квадрокоптера, и не ставьте их, пока он не будет готов к полету.
Это очень важное правило, может что-нибудь замкнуть или вы случайно своими действиями включите газ — пропеллеры вас достаточно сильно поранят. Несколько тысяч оборотов в минуту в любом случае нанесут травму.
Лопасти пропеллеров могут не только вас порезать, но и замкнуть/перерезать электронику. Как правило, если производится какой-то ремонт на дроне, то со всех сторон начинают торчать провода и прочая электроника, чтобы был доступ к нужному месту.
Снимайте пропеллеры!
Подключите квадрокоптер к Betaflight Configurator, перейдите во вкладку Setup, там вы увидите 3D-модель дрона. Подвигайте во все стороны дрон (который у вас на столе), он должен полностью повторять ваши движения. Если вы наклонили нос вниз, то моделька тоже должна наклониться стрелкой вниз.
Если вы наклонили дрон носом вниз, а моделька наклонилась вправо, значит, вам нужно внести корректировки во вкладке Configuration, в блоке меню «Board and Sensor Alignment». Как правило, проблемы такого характера бывают с осью вращения. Там нужно будет выставить значение в градусах, например, 170 (число рандомное, все зависит от того, как будет вести себя моделька по отношению к реальному квадрокотперу).
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
Просто необходимая вещь для гоночного квадрокоптера (да и для съемочного тоже), используется в основном для поиска после падения, своим сильным писком поможет найти дрон даже в густой траве. Также пищалка может издавать сигналы при неисправностях, готовности к взлету, низком заряде аккумулятора и так далее.
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
В отличие от самолетов или вертолетов, любительские квадры не только проще в управлении, но и зачастую проще в ремонте. Более того, в некоторых ситуациях ремонт вовсе не нужен.
Конечно, охватить все существующие неполадки квадрокоптеров вряд ли возможно. Все модели разные, и, хотя их и объединяют общие принципы работы, однако электронная начинка, интеллектуальные режимы, настройки управления отличаются порой кардинально. Но можно дать некоторые общие рекомендации.
Типичная проблема, с которой сталкиваются новички – коптер не взлетает, хотя винты исправно вращаются на увеличенной мощности. Скорее всего, дело в неправильно установленных пропеллерах.
Понять, как правильно установить винты на квадрокоптер, очень легко. Проверьте маркировку, нанесенную на них, а также маркировку на лучах. Они должны совпадать. Скорее всего, пропеллер, который должен вращаться по часовой, был поставлен на двигатель, вращающийся против часовой стрелки (или наоборот).
В результате, направление вращения винтов оказалось неверным. Из-за этого дрон не способен взлететь. Прежде чем что-то разбирать или относить коптер в ремонт, еще раз проверьте правильность установки винтов.
Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.
Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить.
Появление посторонних шумов при запуске движков может являться признаком неисправности. Вполне может быть, что шумы генерируются не самими моторами, а погнутыми или деформированными винтами. Проблема легко решается осмотром и ремонтом пропеллеров, либо же их заменой.
Поставьте коптер на ровную поверхность и внимательно присмотритесь к пропеллерам. Если один или несколько винтов являются выпуклыми, скорее всего, именно они являются источником шума. Искривление поверхности пропеллера приводит к уменьшению подъемной тяги, ведь скорость винта снижается.
Хуже, если шум издают двигатели. Это может говорить о том, что поломка скрыта внутри корпуса мотора. В таком случае ремонт квадрокоптера будет заключаться в проверке и замене движков.
Отсутствие реакции на команды зачастую объясняется тем, что в пульте дистанционного управления сели батарейки или разрядился аккумулятор.
Если сигнальный индикатор на аппаратуре не загорается, то с высокой долей вероятности все дело в севших батарейках. Соответственно, никакой ремонт проводить не нужно. Достаточно вставить свежие элементы питания.
Бывает и так, что пилот неверно выполняет последовательность действий, соединяя коптер с пультом. В инструкции обычно подробно расписываются шаги, которые необходимо совершить, чтобы инициализировать беспилотник. Иногда причиной отсутствия реакции на команды является неверное положение дрона (аппарат перевернут или лежит на боку). Некоторые модели дронов не реагируют на пульт до тех пор, пока не будут установлены на горизонтальную плоскость.
Если замена батареек и правильно проведенная процедура инициализации ничего не дали, то проблему следует искать в проводах и контактах, иными словами, внутри пульта. Возможно, все дело в окислившихся батарейках. В таком случае нужно их заменить и протереть контакты.
Конфигурация пропеллеров
Пропеллеры бывают:
- 2-лопастные;
- 3-лопастные;
- 4-лопастные;
- 5-лопастные.

Конфигурация пропеллера это то, сколько лопастей у пропеллера. Самым эффективным будет однолопастной пропеллер, но его физически нельзя использовать из-за дисбаланса.
Увеличение числа лопастей компенсирует размер пропеллера, особенно в микросборках, ведь если на маленький дрон на раме 100 мм поставить 2-лопастные пропеллеры, он вряд ли будет адекватно летать и это приведет к большим оборотам двигателей и их перегреву. Именно поэтому в микросборках всегда 4-лопастные пропеллеры, а в дронах чуть больше — 3-лопастные.
Из-за сложной физики и аэродинамики увеличение количества лопастей не так эффективно, как увеличение размера. Винт с удвоенным количеством лопастей не будет работать так же хорошо, как винт с удвоенным размером, но он обеспечивает большую тягу за счет большей мощности.
Увеличение количества лопастей приведет к увеличению тяги и сцепления в воздухе за счет отзывчивости и увеличения потребляемой энергии. Если проектируется дрон, на котором вы будете совершать много постоянных и резких изменений направления в полете, то нужны пропеллеры с увеличенным количеством лопастей.
Меньшее количество лопастей предпочтительнее, если требуется более быстрый отклик двигателя, а тяга не так важна. Серьезные гонщики с современными сверхлегкими гоночными рамами довольно часто используют 2-лопастные пропеллеры, потому что рама настолько легкая, что требуемая тяга намного меньше, и, следовательно, может быть реализован более быстрый отклик легких и менее «тянущих» пропеллеров.
В наиболее распространенной категории 5 дюймовых пропеллеров принято считать, что пропеллеры с тремя лопастями обеспечивают наилучший баланс эффективности, тяги и сцепления.
Есть один момент, который многие упускают из вида — это долговечность. Во время полетов, особенно если пилот начинающий, будет очень много аварий и падений, поэтому пропеллеры станут расходным материалом. Но если использовать 2-лопастные пропеллеры, то ломаться они будут меньше.
Описание fast-f4
У F4 очень красивый дизайн, спортивный и не угловато-громоздкий, как у многих ближайших конкурентов, за это определенно плюс.
На конец 2020 года, такие квадрокоптеры как Fast-F4 уже становятся новой планкой в бюджетной нише до $150. Квадрокоптер оснащен механическим подвесом камеры на 2 оси, подвешен на 4 антивибрационных подушках под своим корпусом. Это значит, что горизонт не будет заваливаться при полетах вбок и наклонах вперед/назад, что на порядок повышает уровень качества снимаемого видео.
Видео передается на расстоянии до 500 метров на открытой местности, это ограничено технической возможностью WiFi 5G и передатчиком на дроне. Принимать сигнал будет ваш телефон. Летает же квадрокоптер на расстояние до 2 км, после чего сработает функция «Возврат домой» и дрон прилетит на точку взлета. Сделано это для исключения разрядки аккумулятора при возвращении обратно.
Двигатели бесколлекторные, то есть, в них нет щеток. Такие моторы обладают большим КПД и долго служат. Дрон обладает 7 уровнем ветроустойчивости, во многом благодаря хорошим двигателям. Пропеллеры закреплены на двигателе классическим для складных дронов способом в виде двух планок и между них лопасти. Такое необходимо для возможности складывания лучей. Скорость полета ограничена 30 км/ч.
Интеллектуальные режимы полета:
- Следуй за мной;
- Облет вокруг объекта;
- Полет по точкам на карте.
Функции:
- Автоматический возврат домой;
- Автоматические взлет и посадка;
- Передача последних координат квадрокоптера при аварии;
- Управление жестами.
Автоматический возврат домой — это очень крутая функция, которая не даст потеряться квадрокоптеру, а еще вернет его в случае потери связи или низком заряде аккумулятора. Функцию можно активировать и самостоятельно, нажав соответствующую кнопку на пульте.
Перед взлетом важно «поймать» более 7 спутников, чтобы работала функция стабилизации и функция возврат домой!
Автоматические взлет и посадка тоже очень удобны, квадрокоптер сам взлетит или совершит посадку, без участия пилота.
Очень важной функцией будет передача последних координат квадрокоптера, если тот по той или иной причине где-то упал или зацепился и отключился. Благодаря этому, шансы потерять квадрокоптер сводятся к нулю.
Пульт управления классический, с минимальным количеством кнопок. Антенны складываются, как и крепление для телефона. Последнее служит еще и крышкой для черно-белого экрана. Минусом можно назвать отсутствие выдвигающихся ручек с низу. Пульт без них будет держать не совсем комфортно.
Какие бывают размеры пропеллеров
Размер пропеллеров напрямую связан с тягой, отзывчивостью и тем, как он «цепляется» за воздух. Большой пропеллер будет проталкивать собой больше воздуха и будет тратить много энергии для вращения. Он будет затягивать изменение скорости вращения двигателей, потому что большой и тяжелый.
Пропеллеры малого размера быстрее реагируют на изменение скорости вращения двигателей. Они проталкивают через себя меньше воздуха, соответственно тратят меньше энергии при изменении скорости вращения. Небольшие пропеллеры ставят на гоночные квадрокоптеры, чтобы очень быстро менять скорость вращения двигателей, совершать быстрые падения, которые не получатся на больших пропеллерах из-за планирования и для быстрого изменения направления полета.
Пропеллеры должны соответствовать двигателям, потому что, если мы поставим 3-дюймовые пропеллеры на двигатель, который рассчитан на 5 дюймовые пропеллеры, то это приведет к чрезвычайно высоким оборотам и большому потреблению энергии из-за маленькой нагрузки от пропеллеров, при этом тяга будет небольшая.

Наиболее популярным пропеллером считается 5-дюймовы пропеллер, для которого подходят двигатели в диапазоне размеров 2204-2307.
Механические проблемы
Попробуйте заармить дрон (запустить двигатели) и дать небольшой газ. Без пропеллеров, конечно же.
Теперь слушайте, как они работают — есть ли посторонний шум, скрежет, вибрации или подергивания. Скорее всего, мотор будет дергаться или вибрировать. Для исправления можно попробовать следующее:
- проблему может исправить монтаж полетного контроллера на мягкие подушки (силиконовые);
- если вы используете режим обновления 32К/32К, попробуйте вернуться на 8К/8К, так как на 32К гироскоп намного чувствительнее;
- попробуйте уменьшить значение фильтра гироскопа «low pass filter frequency» (это фильтр низких частот);
Если проблему не удалось устранить, почитайте эту статью, возможно, она вам поможет.
Если ваш квадрокоптер до этой проблемы летал нормально, то, скорее всего, дело в механическом повреждении одного из компонентов. Это также может привести к вопросу, почему переворачивается квадрокоптер.
На двигателе могут отвалиться магниты, вал, может рассыпаться подшипник или оплавиться эмаль на обмотке. Все это выводит из строя двигатель. Из-за магнита и подшипника заклинет, из-за вала может вылететь колокол или зацепится магнит — тоже заклинет. А оплавленная эмаль вызовет короткое замыкание — мотор сгорит.
От перегрева, а также от механических ударов могут выйти из строя регуляторы оборотов, так как это довольно сложная электроника, основанная на «ключах», и выход из строя одного из компонентов регулятора нарушит работу всей платы, а та в свою очередь — работу двигателя.
Если после калибровки акселерометра нет никакого эффекта и модель квадрокоптера по-прежнему не понимает, в каком она положении — у вас проблемы с датчиком, его нужно либо поменять (если вам повезло и вы специалист по ремонту электроники), либо заменить полетный контроллер.
Если во вкладке Setup моделька постоянно крутится и ведет себя неадекватно, то есть проблемы с гироскопом. Для проверки попробуйте отсоединить питание и снова включить — после каждого включения гироскоп проходит калибровку. Если это не помогло, то выход только в замене полетного контроллера.
Возможно, вам поможет статья: Не запускается квадрокоптер? Исправляем проблемы
Статья написана на основе.
Проверьте схему двигателей (mixer)
Перед этой проверкой снимите пропеллеры!
Если у вас переворачивается квадрокоптер, откройте Betaflight и подключите аккумулятор к дрону, затем перейдите во вкладку Motors и проверьте направление каждого двигателя в соответствии со схемой. На глаз вы навряд ли сможете определить направление, так как мотор будет слишком быстро крутиться даже на малых оборотах, поэтому используйте палец. Слегка дотроньтесь до мотора и вы поймете, в какую сторону он крутится.
Если по схеме выяснилось, что мотор крутится не в ту сторону, есть два способа это исправить:
- перепаять провода
- зайти в BL_heli и сделать реверс.
Снова зайдите в Betaflight во вкладку Setup, там будет 3D-модель вашего дрона. Возьмите его в руки и подвигайте, модель должна четко повторять ваши действия. Если вы наклоняете вперед, а моделька наклоняется вправо, то вам нужно скорректировать направление.
Также нужно откалибровать акселерометр. Перейдите во вкладку Setup, там будет кнопка Calibrate. Установите дрон на ровную поверхность и нажмите кнопку. Возможно, датчик был не откалиброван и обманывал полетный контроллер, и последний пытался это исправить.
Во вкладке Setup будет блок для выбора схемы двигателей. Если у вас 4 двигателя, то должна быть выбрана схема Quad X.
Перед тем, как прикрепить моторы к раме, измерьте длину винтов. Слишком длинные могут повредить обмотку мотора, что приведет к короткому замыканию, да и просто испортит двигатель.
Сгоревшим мотором дело может не обойтись. Если вы еще не в курсе — карбон (материал, из которого сделана рама) токопроводящий материал, и если винт замкнет на проводку, то сгорит и вся остальная электроника, которая касается рамы.
Вот инструкция, как этого добиться при использовании Baseflight / Cleanflight или Betaflight
- Снимаем винты
- Меняем направление вращения в регуляторах через BLHeliSuite
- Переходим в консоль Betaflight CLI и пишем:
Ставим винты в обратном порядке, CW вместо CCW и наоборот. Не нужно переворачивать винты! 🙂
После обновления прошивок каждый раз убеждаемся, что у нас всё настроено как надо.
Калькулятор ecalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис — eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.
Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит «без привода»), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе 10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены — одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете — температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров — тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
Шаг пропеллера
Шаг — это угол наклона каждой лопасти пропеллера.
Шаг это то расстояние, которое пройдет пропеллер вверх за 1 оборот в идеальных условиях.
Высокий шаг приводит к большей тяге и максимальной конечной скорости, но маленькому крутящему моменту на низких скоростях. Для сравнения представьте пятую скорость в автомобиле, здесь тоже самое, тронуться на 5 передаче вы не сможете, а вот развить еще большею скорость уже будучи на ней — да.
Пропеллер с большим шагом будет медленно реагировать на газ, потреблять больше энергии и будет максимально эффективным на больших оборотах.
Высокий шаг применяется в пропеллерах для съемочных квадрокоптеров.
Низкий шаг обеспечивает большой крутящий момент на малых оборотах, но у него небольшая тяга и максимальная конечная скорость. В автомобиле это первая и вторая передачи. Двигатель с таким пропеллером будет быстро реагировать на изменение уровня газа, дрон будет очень отзывчивым.
Низкий шаг применяется в пропеллерах для гоночных дронов (мини и микро).
Идеальными пропеллерами для гоночных мини квадрокоптеров считаются пропеллеры с шагом от 4 до 4,5 дюймов, они сочетают в себе хорошую чувствительность, крутящий момент, максимальную скорость и тягу.

Балансировка пропеллеров с помощью подручных средств
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется «эффект желе» при съёмках видео.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается — Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Чтобы приступить к балансировке, установите устройство на ровной поверхности так, чтобы ось была выровнена по горизонтали.
Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой).
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение — переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Третий вариант
- Установи галочку в «указать параметры винта»
- Введи диаметр винта и шаг винта
- После нажатия на кнопку расчёт, программа рассчитает профили сечения винта (форма лопастей) на различных радиусах от центра. Результат ты получишь в окне просмотра, и в виде таблицы Date.html в каталоге программы.
- Кнопками со стрелками просматриваешь сечения на различных радиусах, а ползунком меняешь масштаб.
Как ты можешь заметить, подбор и корректировка пропеллеров, это важное и не самое простое занятие. Однако, настоятельно рекомендую уделить этому время. Даже в такой, на первый взгляд, неуклюжей корове, как квадрокоптер, есть место аэродинамике. К тому же это может сэкономить тебе очень много денег на моторах.
Конечно, всё вышесказанное достаточно ситуативно. К примеру, если ты собираешь маленький дрон, или просто хочешь попробовать, то пропеллеры можно использовать и самые дешёвые, и не отбалансированные.
Это вряд ли помешает твоему дрону взлететь, да и ты сразу поймёшь, что не так, и на что нужно впредь обращать больше внимания.
Так же крайне не рекомендую начинать с соосной компоновки, если ты не знаком с миром беспилотной авиации. Там есть куча нюансов, которые базируются на более глубоком понимании темы. Идеальным вариантом для начала будет четырёх лучевая, квадратная компоновка.
Ну и нужно понимать, что если ты не крутой инженер, с богатым набором закрытых САПР программ, то всё, что ты можешь рассчитать – мало тебе поможет.
Все эти вычислительные решения дают крайне ориентировочный результат. Так что я рекомендую тебе побольше экспериментировать, хотя помощью софта пренебрегать тоже не стоит. Пробуй, учи матчасть, когда-нибудь получится очень круто!
Уф… Я старался, клавиатуру до стола стёр, выпил ведро кофе. За это ты можешь наградить меня, и поделиться этой статьёй, при помощи кнопок внизу. А если хочешь почаще узнавать что-то новое и полезное, то подписывайся на нас в социальных сетях. Удачи, пилот!
Rashvinta
RashVinta — программа, которая производит расчет параметров воздушного винта не только для квадрокоптера, но и других летательных аппаратов.
С помощью RashVinta можно делать вычисления с исходными данными, такие как:Мощность двигателя и диаметр винта;Мощность двигателя и частота вращения винта;Диаметр Винта и его шаг.
В первом случае устанавливаем флажок только на параметре «расчет по диаметру винта». Указываем информацию о размере пропеллера, мощность двигателя, скорость полета — максимальная и средняя. Жмем «Рассчитать» и видим параметры шага и частоту обращения пропеллера.
Во втором случае все отметки снимаются. Далее, как и в первом случае указываем исходную мощность двигателя, также не забываем про частоту вращения винта и скорость летательного аппарата, аналогично первому случаю. Жмем «Рассчитать» и видим все нужные данные по диаметру винта и его шагу.
В третьем случае расчеты производятся на профессиональном уровне. Галочкой отмечаем пункт «указать параметры винта». Параметры диаметра и шага винта вносим в нужные поля. Жмем «Рассчитать» и видим данные по профилю лопасти винта, его изображение появляется в окне.
В программе есть возможность увидеть профиль лопасти под углом наклона. Для этого отметьте галочкой пункт «Профиль с углом». И еще можно увидеть точки, который были использованы для расчета — отметьте галочкой пункт «показать расчетные точки». На принтере данное изображение профиля можно вывести на бумагу в проекции 1:1.
Методы установки
Есть разные способы установки винтов на квадрокоптер. Зачастую вал электромотора — это ничто иное, как металлический штырь. Без каких-либо вспомогательных элементов для установки винта. Для таких случаев используют цанговые зажимы и пропсейверы — это специальные переходники.
При создании своих моделей квадрокоптеров, удобно использовать пропсейверы (см. на фото) Пропсейвер похож на втулку. В боковой части поверхности имеются по одному отверстию с каждой стороны, выполненных симметрично. Такая конструкция устанавливается на вал, и затягивается винтами. Далее пропеллер нужно надеть на вал и закрепить нейлоновыми стяжками, также есть вариант крепления резиновыми кольцами.
Цанговый зажим является более надежным, по сравнению с пропсейвером. Его конструкция построена конусообразной втулкой с резьбовым соединением. Сначала на вал устанавливается цанга, затем идет зажимная втулка с пропеллером и шайбой. Весь переходник закрепляется коком — гайкой, особой формы.
На моторах класса Outrunner, где ротор бесколлекторного электродвигателя находится с внешней стороны, в верхней части конструкции присутствует несколько отверстий, предназначенных для установки различных типов переходников и креплений.
Компания DJI, при производстве своих квадрокоптеров на бесколлекторных моторах, устанавливают самозатягивающиеся гайки. Резьба на валах такого типа двигателей, роторы которых вращаются в противоположенную сторону.
Материал пропеллеров
Чаще всего в магазинах вы покупаете пропеллеры из поликарбоната, он пластичный и прочный. Еще есть пропеллеры из АБС-пластика, это тоже очень прочный пластик, но более хрупкий. Отличие от поликарбонатных пропеллеров в том, что при ударе лопасть из АБС-пластика скорее всего сломается, а из поликарбоната просто погнется, причем эту лопасть можно выпрямить, но это чревато возникновением вибрации из-за нарушенной балансировки.
Есть еще пропеллеры из пластика, который армирован стекловолокном, это очень жесткие пропеллеры, но в тоже время при сильном ударе ломаются.
Выбор материала пропеллеров зависит и от времени года. Пластмассы для пропеллеров термопластичны, то есть, их жесткость и пластичность зависит от температуры. Если вы летаете зимой, то лучше ставить пропеллеры из АБС-пластика, так как поликарбонат на холоде дубеет и становится хрупким.
Универсальными пропеллерами считаются пропеллеры из поликарбоната.
Как отличить поликарбонатный пропеллер от АБС-пластика? Первый относительно прозрачный, второй совсем нет:
Пластик и карбон: где качество и эффективность
Пластиковые пропеллеры пользуются большей популярностью. Их отличительные черты это:
- пластичность;
- низкая цена;
- большой выбор ассортимента;
- доступность;
Также стоит отметить, что более гибкие лопасти имеют повышенную устойчивость к деформациям при ударах о препятствие, но вместе с тем, имеются погрешности в балансировке.
На рынке также представлены карбоновые лопасти. Карбоновые винты высоки в цене, но обладают рядом положительных критериев:
- прочность;
- эффективность;
- лёгкость;
Также на рынке представлены гибридные пропеллеры из пластика и углеродного волокна. Второй обычно усиливает первый. Пропеллеры такого типа дешевы в цене и не уступают по качеству и жесткости чисто карбоновым.
Под качеством реквизитов понимают то, насколько правильно они изготовлены. Правильное изготовление пропеллеров обеспечивает хороший баланс во время полёта и не создают дополнительную вибрацию ВМГ. Бренды, которые производят лучшие пропеллеры для квадрокоптеров и других летательных аппаратов — это GWS. Также еще рекомендуют APC, которую производят американцы, и EMP с большим ассортиментов товаров, не только реквизитов.
Схема установки пропеллеров
Прежде, чем устанавливать пропеллеры на квадрокоптер, вам нужно узнать, в правильную ли сторону будут крутиться моторы. Большинство квадрокоптеров летает на конфигурации Multiwii, выглядит она вот так: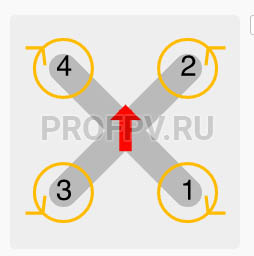
Красная стрелка — это направление, куда будет лететь квадрокоптер, то есть вперед. Желтые стрелки — направление вращения пропеллеров. Можно легко запомнить в какую сторону какой двигатель крутится: два передних мотора крутятся в сторону камеры, а два задних мотора крутятся от камеры (передние внутрь, задние наружу).
№6 проверьте приемник
Подключитесь к бетафлайт и перейдите во вкладку «receiver». Подключите аккумулятор, включите пульт. Проверьте, все ли команды реагируют. Когда вы двигаете стиками и переключателями, цветные полоски тоже должны двигаться.
Если ничего не происходит, убедитесь, включен ли приемник и пульт, правильно ли подключен приемник. Также убедитесь, что во вкладке Конфигурация выбран правильный тип приемника (IBus, SBus и т.д.), а также правильный ли выбран протокол работы (мультишот, дшот и т.д.).
Если полоски двигаются, но не в том порядке, попробуйте поменять карту разметки с AETR1234 на TEAR1234 во вкладке «receiver».
или внеся корректировки через CLI, подробнее здесь (в статье это заголовок Receiver).
Неправильные средние значения приведут к тому, что ваш дрон начнет дрейфовать и лететь в разные стороны (смотря какой канал не в середине).
Проверьте, какое число показывает стик газа, когда он в нижнем положении. Число не должно быть выше 1040, в противном случае дрон не получится заармить (запустить двигатели).
Спецификация и характеристики
Чтобы понять параметры определенного пропеллера, следует смотреть на кодировку. Производители обозначают длину, шаг и количество лопастей в таком формате:
LLPPxB или LxPxB — где L-длина лопасти, P-шаг (указывается в дюймах) и B-количество лопастей.
На примере разберем два разных формата обозначения:
Так первый реквизит с пометкой 6045 (6 на 4,5), говорит о том, что у пропеллера две лопасти (по стандарту), 6-дюймов длина и 4,5-дюйма шаг.Во втором уже указано количество лопастей 5040 на 3 (5 на 4 и 3), где 3 на конце это, как раз, количество лопастей. А 5 и 4 дюйма, длина и шаг соответственно.
В некоторых случаях указываются обозначения направления вращения. Они указываются латинскими буквами — R и C. Так пропеллеры с пометкой (C) ставятся на двигатели CCW, а с пометкой (R) — на двигатели с CW. Еще некоторые производители указывают аббревиатуры из чего они изготовлены BN, что значит с заостренными наконечниками и утяжелителями или HBN – гибрид пластика и карбона (о них мы говорили выше).
Материал
Пластик – наиболее популярный, но не самый удачный вариант. Пластиковые пропеллеры обладают низкой ценой и очень широки ассортиментом. Обладают разной, но в основном высокой гибкостью и мягкостью. Якобы это увеличивает их устойчивость к механическим повреждениям.
Углеродное волокно – Очень дорого, но очень круто. Великолепная жёсткость, лёгкость. Легко сбалансировать. Это значит, что брака будет меньше. Не теряет форму. Да и наличие чёрных лопастей всегда радует глаз. К ним рекомендуется докупить защиту лопастей для квадрокоптера, ибо их очень легко расколоть.
Композит – внутри пластик, снаружи покрытие из углеродного волокна. Дешевизна пластика, жёсткость и износостойкость (почти) как у карбоновых пропеллеров. Также не очень высокая цена.
Рекомендации по выбору пропеллеров и заключение
Рекомендации на основе классических пропеллеров 5045.
Для поиска других пропеллеров опирайтесь на таблицы ваших двигателей, там будет указан размер и шаг (4 цифры), а если такой не нашлось у продавца, найдите другого или лучше выберите другие двигатели, так как отсутствие таких данных говорит о низком качестве.
Наиболее зарекомендованные бренды это LDARC (они же KINGKONG), HQProp и Dalprop. Не покупайте самые дешевые пропеллеры, так как качество и балансировка часто низкого качества, только если для тестов, чтобы убедиться в качестве дорогих.
На Banggood цена в пересчете на количество получается дешевле.
Основные понятия
- «В идеальном мире» — чисто теоретическое понятие, не берущее в расчёт побочные факторы
- Параметр «длинна», это и есть длинна пропеллера. Если точнее, то диаметр окружности, описываемой лопастями
- Параметр «шаг» можно сравнить с шагом резьбы. Это то расстояние, которое может пройти винт за один оборот (по аналогии с шурупом в дереве) . Чем больше угол атаки лопасти, тем больше это расстояние.
«Угол атаки», это Угол наклона лопасти, относительно горизонтальной плоскости - «Тяга», это сила, которая создаётся винтом. Она компенсируется остальными силами реакции (сопротивление воздуха, гравитация). Из этого следует, что пока тяга больше сопротивления – коптер будет разгоняться в направлении, противоположном вектору тяги.
Основное
- Тут ты выставляешь основные параметры своей сборки
- Полный вес модели можно указывать «без ВМГ» (винтомоторная группа = пропеллеры и моторы). При выборе пропеллеров и моторов калькулятор сам учтёт их вес
- Количество винтов – соосные винты, это два винта расположенных друг над другом, а одноосные это один винт на одном луче коптера. Для простоты, в нижнем правом углу, калькулятор рисует тебе конфигурацию
- Размеры рамы- По диагонали, от одного конца луча, до другого
- На остальное пока можешь забить. Оно уже стоит по стандарту. Высота, температура и давление может пригодится для расчёта полётных характеристик для разных высот
Пропеллер
- Выбираешь тип пропеллера из списка. Угол кручения (угол атаки), диаметр винта и его шаг ты узнаешь из спецификации
- Передаточное число используешь, если твой пропеллер присоединён к мотору через редуктор
Всё, можно нажимать «рассчитать», и наслаждаться результатами с 15% погрешностью. Я не зря сказал о погрешности. Все эти расчёты годятся только для того, чтоб прикинуть – полетит, или нет. Более точной информации ты не получишь.
Если в списках нет нужной позиции, то можно воспользоваться строкой Custom, и ввести всё самостоятельно.
Технические характеристики
- Складная конструкция;
- Бесколлекторные двигатели;
- 2-осевой подвес камеры;
- Камера 4К (характеристики от производителя);
- Спутниковая навигация;
- Интеллектуальные режимы полета;
- Размеры: в разложенном виде 36*33*7 см, в сложенном 17*10,5*7 см;
- Время полета: до 25 минут;
- Аккумулятор 7.4V 3500 mAh;
- Дальность полета: до 2000 метров (управление с пульта, либо полет по координатам);
- Высота полета: до 120 метров;
- Дальность приема видео (FPV) WiFi 5G: до 500 метров.
Количество
Количество лопастей винта влияет на подъёмную силу, стабильность и отзывчивость коптера (в идеальном мире). Чем больше лопостей, тем эти параметры лучше. На самом деле, многолопастные пропеллеры (2 ) ставятся только на мелкие дроны. Это происходит из за дороговизны изготовления и сложности балансировки. В большом размере отбалансировать 4 лопасти очень дорого.
Чем их больше, тем стабильнее БПЛА. Малое количество негативно сказывается на управляемости.
Виды лопастей
- Normal (N) – Имеют заострённые на концах лезвия. Это уменьшает тягу, но и снижает расход энергии аккумулятора
- Bullnose (BN) – Бычий нос (Закруглённые). При равном с нормальными диаметре, имеют большую тягу и площадь. За счёт тяжести ведут себя более стабильно, и увеличивают отзывчивость дрона по рысканью. Сильно повышают расход энергии акб.
- Hybrid Bullnose (HBN) – промежуточный вариант. Имеют как и преимущества, так и недостатки предыдущих.
В первом варианте
- Галочку на «расчёт по диаметру винта»
- Вводите нужный диаметр в см
- Вводите мощность двигателя в лошадиных силах, подсмотренную в параметрах двигателя (чтоб получить лошадей из кВт используй формулу кВт*1.36)
- Вводи максимальную скорость, которую позволит развить твой винт
- Введи среднюю скорость в поле «Скорость расчётная»
- Нажми кнопку расчёт
В результате ты увидишь необходимый шаг винта и частоту вращения.
Качество
Как правило, чем дороже, тем качественнее. Тут может быть много параметров. Основной, это балансировка. Качественный пропеллер балансировать не придётся. Так же важным моментом является качество материала.
Пластик может быть упругим и эластичным, а может быть мягким и НЕ эластичным. С этим нужно быть внимательным. Не смотря на кажущуюся простоту, от качества лопастей напрямую зависят лётные качества коптера.
№8 настройте failsafe
Failsafe — это одна из главных вещей, которую должен знать каждый новичок в первую очередь. Если вы не настроите Failsafe, то при потере сигнала ваш дрон просто улетит и будет лететь, пока не разрядится аккумулятор. О последствиях, думаю, можно и не говорить, это, как минимум, потеря денег, максимум — он упадет кому-нибудь на голову.
Как настроить Failsafe, можно прочитать здесь.
Заключение о сложности процедуры
Как вы уже заметили, работы по подбору и корректировке реквизитов, довольно сложная задача для новичка. Но я надеюсь, что эта статья будет полезна для любителей квадрокоптеров и другой беспилотной авиации, грамотно провести процедуру балансировки пропеллеров, их установки на квадрокоптер с самодельной конструкцией. А также избавиться от ошибок в работе ВМГ серийных моделей мультикоптеров.
№11 проверка fpv системы
Перед первым полетом убедитесь, что FPV система корректно работает: камера fpv снимает и направляет видео в видеопередатчик, а он в свою очередь отправляет сигнал в ваш шлем или очки. Проверьте, совпадают ли каналы на видеопередатчике и шлеме/очках, качественная ли картинка.
Если у вас есть OSD, то его можно настроить под свои нужды, статья как настроить OSD Betaflight.
Что в комплекте?
- Квадрокоптер;
- 2 пары запасных лопастей;
- Отвертка;
- USB кабель для зарядки;
- Инструкция.
Посмотреть на Aliexpress
Регулятор
- Из списка выбираешь свой регулятор скорости
- В навесном оборудовании пишешь суммарное потребление и вес всей той фигни, что ты хочешь повесить на свой дрон. Камера, диоды, сервоприводы, мелкокалиберные орудия. Если ты уже указал их вес в основном весе модели, то поле вес оставляешь с нулём
№9 откалибруйте регуляторы оборотов (esc)
Регуляторы не нужно калибровать, если используется протокол DShot, включая DShot150, DShot300, DShot600, DShot1200 и DShot2400. Но нужно будет калибровать, если у вас PWM, Oneshot125, Oneshot42 и Multishot.
Как откалибровать регуляторы оборотов, читайте здесь.
Что нужно знать: основные определения и понятия
Пропеллеры для квадрокоптеров подразделяются по следующим критериям:
- какая у них длина;
- какой у них шаг;
- какая площадь пропеллеров;
- какое направление вращения;
- какая у них форма;
- и сколько лопастей на каждом пропеллере;
Во втором варианте
- Убери все галочки
- Введи мощность двигателя
- Введи частоту вращения винта (двигателя, если нет редуктора)
- Введи максимальную и среднюю скорости
На выходе ты получаешь диаметр винта в сантиметрах и шаг винта.
Аккумулятор
- Из списка выбираешь нужный, или максимально похожий аккумулятор, и состояние заряда «номинал»
- В поле «P» пишешь количество параллельно соединенных аккумуляторов (если нужно)
Деформация лучей
Деформацию лучей заметить довольно просто. Обычно лучи повреждаются в результате жестких падений или после столкновений с препятствиями в полете. То есть это в любом случае нештатные ситуации.
Мотор
Выбираешь производителя мотора из списка, и проверяешь по параметрам. Если похоже, то всё нормально, если нет, то продолжаешь «Охлаждение»
Эластичность
Эластичность пропеллера улучшает устойчивость оного к перегрузкам и механическому воздействию (не путать с мягкостью).
