

- Описание [править]
- Что такое quaternion-based dcm imu [править]
- Что в комплекте [править]
- Cc3d не получается откалибровать [править]
- Pid-калькулятор для cc3d [править]
- Верхняя сторона платы [править]
- Вход vbat [править]
- Выход buzzer [править]
- Выходы outputs [править]
- Для чего есть опция zero gyros while arming aircraft [править]
- Дополнительные возможности [править]
- Если в полёте газ в ноль, а потом газануть слегка или сильно (без разницы), то коптер переворачивается [править]
- Есть ли у cc3d функция возврата домой по gps? [править]
- Зуммер постоянно пищит, на переключение режима никак не реагирует [править]
- Известные проблемы [править]
- Как в cc3d сбросить все настройки [править]
- Как изменить направление вращение моторов в cc3d? [править]
- Как использовать барометр и компас [править]
- Как сохранить все настройки в файл [править]
- Комплектация sp racing f3 [править]
- Контакты boot [править]
- Мастер настройки — шаг за шагом.
- Мастер настройки cc3d
- Настройка [править]
- Настройка квадрокоптера программами mission planner, dji nazа assistant, openpilot , librepilot, cleanflight на сайте www.radiocopter.ru
- Недостатки [править]
- Нижняя сторона платы [править]
- Обновление прошивки [править]
- Особенности [править]
- Питание [править]
- Питание есть, но плата признаков жизни не подаёт [править]
- Платы разработки [править]
- Подключение контроллера [править]
- Порт i2c1 [править]
- Порт io_1 [править]
- Порт io_2 [править]
- Порт swd/debug [править]
- Порт uart1 [править]
- Порт uart2 [править]
- Порт uart3 [править]
- При установки на коптер не хватает места [править]
- Проблемы с компасом [править]
- Проверка работоспособности [править]
- Распиновка разъема сервы cc3d [править]
- Советы [править]
- Список поддерживаемых контроллеров [править]
- Схемы подключений [править]
- Характеристики [править]
Описание [править]
Seriously Pro Racing F3 (другие названия: SP Racing F3, SPRacingF3) — полётный контроллер на процессоре STM32F303, предназначенный для установки, главным образом, на FPV-миникоптеры. Разработан одним из создателей CleanFlight, Dominic Clifton, на замену старых полётных контроллеров на процессоре STM32F1.
Доступны две версии: Acro и Deluxe
- Acro 6DOF: стандартная модель для гонок и фристайла.
- Deluxe 10DOF: стандартная дополнительные датчики для удержания высоты (барометр MS5611) и направления (компас HMC5883).
Что такое quaternion-based dcm imu [править]
Более “правильный” способ вычисления (и представления) ориентации коптера в пространстве, основанный на кватернионах. По идее должно повысить точность (особенно в “крайних” случаях). [1]
Что в комплекте [править]
1 x CC3D Полетный контроллер
1 x Коробка для полетного контроллера
Cc3d не получается откалибровать [править]
Причина может быть в применении неподходящей антивиброплиты. Контролер должен стоять на нейлоновых стойках или на двустороннем скотче. То есть контролер должен крепко сидеть на раме.
Pid-калькулятор для cc3d [править]
Примерный алгоритм настройки:
- Выставить нужные углы
- Сбросить пиды на значения по умолчанию
- Обнулить I и D на Roll и Pitch.
- Включить TxPID и назначить крутилку на Rate Roll Kp. Значения от 0.003 до 0.02
- Выкрутить крутилку на минимум, взлететь и медленно крутить до тех пор, пока не начнёт стабильно колбасить как на видео.
- Посадить коптер, запомнить значение Roll Kp, сбросить его на дефолтное.
- Назначить крутилку на Rate Pitch Kp. Значения от 0.003 до 0.02.
- Взлететь, найти Pitch UOV, записать.
- Забить найденные Roll и Pitch UOV в калькулятор
- Подстроить Outer loop Kp под свои предпочтения
Есть еще один «быстрый» метод настройки ПИД контроллера с использованием критического положения системы (момент автоколебаний), он же UOV.
- Найти параметр P (I=D=0), при котором коптер осциллирует по Roll, потом по Pitch
- Забить найденные параметры в калькулятор
- Установить полученные параметры в контроллер.
На базе этого метода вполне успешно работают автоматические алгоритмы настройки ПИД (пример — Autotune в Cleanflight).
Верхняя сторона платы [править]
8. Вход VBAT для мониторинга напряжения батареи
10. OUTPUTS — выходы сигналов управленияна регуляторы/сервомашинки
11. Контакты BOOT — для запуска загрузчика процессора.
A. Индикатор питания (светодиод)
B. Индикатор состояния (светодиод)
C. Метка для правильного расположения платы (направление «вперёд»).
D. Датчики: акселерометр и гироскоп.
E. Магнитометр (датчик компаса, только в версии Deluxe).
Вход vbat [править]
- Предназначен для подключения силовой батареи борта с целью мониторинга её напряжения и предупреждения о разряде.
- Очень важно правильно подключить батарею: проверьте полярность перед подключением!
Выход buzzer [править]
- Предназначен для подключения пищалки (зуммера) для сигнализации о событиях или для предупреждений.
- Пищалка также может быть использована для поиска упавшего коптера по звуку.
- Рекомендуется использовать не слишком мощные (с током потребления
50мА и напряжение питания 5В) с внутренним генератором (пищит при подаче постоянного напряжения).
Выходы outputs [править]
- К выходам можно подключить до 8 регуляторов моторов или сервомашинок.
- Поддерживаются регуляторы: PWM (по умолчанию 400Гц), OneShot125
- Поддерживаются сервомашинки PWM (по умолчанию 50Гц).
- Внимание! Сначала следует настроить выходы под конкретные регуляторы или сервомашинки, и только потом подавать питание на них.
Для чего есть опция zero gyros while arming aircraft [править]
Опцию Zero gyros while arming aircraft в настройках Attitude настоятельно рекомендуется держать в активном состоянии. Эта опция отвечает за калибровку гироскопа и она может избавить от множества проблем. В OpenPilot (CC3D), в отличии от CleanFlight, при включении питания коптера гироскоп калибруется просто усреднением последних показаний.
Поэтому, если после подачи питания не поставить коптер на землю и не подождать пока откалибруются гироскопы, а начать закреплять батарею или вертеть аппарат — гироскопы откалибруются некорректно, и вскоре после взлета весьма вероятно падение. А если опция установлена, то перед армингом будет повторная калибровка гироскопов, и полёт пройдет как нужно, но при этом лучше не пытаться армить коптер в руках.
Дополнительные возможности [править]
Список возможностей CleanFlight, которых нет в Baseflight.
- Поддержка многоцветных светодиодных RGB-лент с чипом WS2811, который позволяет зажечь каждый светодиод заданным цветом, используя его адрес. Это можно использовать для подсветки на лучах коптера (помогает определять расположение коптера в пространстве), для индикации разряда аккумулятора, для индикации режимов полётов и т.п.
- Поддержка регуляторов с функцией Oneshot125.
- Функция BlackBox («чёрный ящик»), записывающая все параметры полёта либо во внутреннюю flash-память контроллера, либо на SD-карточку.
- Поддержка дополнительных возможностей процессоров серии STM32F3 (Baseflight поддерживает только серию STM32F1).
- Приём более, чем 8 каналов радиоуправления (например, при подключении к приёмнику FrSky X4RSB по шине SBus – 16 каналов).
- Возможность использования переключателя режимов на пульте управления с любым количеством позиций путём гибкого задания диапазонов управляющего сигнала. (В Baseflight можно использовать только 3-позиционный переключатель, а в MultiWii – либо 3 либо 6).
- Новый PID-контроллер Lux (вдобавок к оригинальному из MultiWii), во внутренних вычислениях оперирующий числами с плавающей запятой и устойчивый к изменению времени выполнения цикла вычислений (учитывающий его в интегральных вычислениях). Возможность регулировать ПИД-параметры во время полёта.
- Возможность одновременного подключения Bluetooth-модуля и OSD.
- Улучшенная обработка входных сигналов PWM и PPM, а также определение FailSafe.
- Телеметрия:
- Поддержка FailSafe при подключении приёмников Graupner по PPM.
- Возможность получения RSSIPWM-сигналов через ADC (проверено с приёмниками FrSky D4R-II and X8R).
- Возможность подключения жидкокристаллических OLED-дисплеев для вывода на них такой информации, как напряжение батареи, текущий профиль, версию, информацию от датчиков, сигналы радиоуправления и т.п.
- Возможность смены рейтов (Rate) во время полёта.
- Гибкая настройка последовательных портов для подключения различного оборудования: приёмников радиоуправления по PPM, телеметрии, GPS и т.п.
Если в полёте газ в ноль, а потом газануть слегка или сильно (без разницы), то коптер переворачивается [править]
Так может быть, если от платы к регулям сигнальные провода идут без «земляных». Обязательно должны быть подключены сигнальные провода и по «земле» тоже.
Есть ли у cc3d функция возврата домой по gps? [править]
Вообще-то нет. Но есть неофициальные прошивки Harakiri и iNav, которые поддерживают CC3D, они могут работать с модулем GPS и компасом, обеспечивая удержание позиции и автовозврат.
Зуммер постоянно пищит, на переключение режима никак не реагирует [править]
- Проверьте, поступают ли на плату сигналы с приёмника.
- Проверьте, правильно ли настроен мониторинг и сигнализация напряжения батареи.
- Вероятно, это клон, причина в некачественном копировании разводки платы и транзистор на выходе постоянно открыт. Попробуйте подпаяться с обратной стороны.
Известные проблемы [править]
Обрыв дорожки на плате. Проявлялось как периодическая потеря сигнала при отлете метров на 20. Перепайка антенны в приемнике, замена в передатчике, переборка проводки в пульте результатов не давали. Оказалось, что причина в обрыве дорожки на плате CC3D, по которой земля идёт на приёмник. В итоге он питался паразитным питанием от индикатора разряда батареи.
источник
Как в cc3d сбросить все настройки [править]
По умолчанию при старте визарда предлагается прошивка со сбросом настроек. Чтобы оставить текущие настройки нужно снять галочку на первой страничке визарда.
Как изменить направление вращение моторов в cc3d? [править]
В настройках контроллера — никак. Направление вращения изменяется переключением любых двух из трёх проводов между мотором и регулятором. Направление вращения (какие провода к каким подключать) лучше узнать заранее, т.к. вместо разъёмов рекомендуется пайка напрямую к регуляторам.
Как использовать барометр и компас [править]
Бародатчик и магнитометр будет работать с прошивкой CleanFlight. С прошивками OpenPilot и LibrePilot барометр и компас работать не будут.
Как сохранить все настройки в файл [править]
Можно ВСЕ настройки сохранить в конфиг-файл, чтобы по-быстрому накатить их при необходимости.
Более того, при установке новой версии прошивки (Cleanflight или Betaflight), настройки всегда лучше затирать (FULL CHIP ERASE) и потом накатывать по новой.
Если используется только один профиль, то достаточно в терминалке (вкладка CLI) выполнить команду:
dump
Чтобы сохранить данные из всех профилей, следует использовать такую последовательность команд:
profile 0 dump profile 1 dump profile dump rates profile 2 dump profile dump rates profile 0
После этого следует скопировать полученный список команд в текстовый файл и сохранить у себя на компьютере.
Комплектация sp racing f3 [править]
- Плата SP Racing F3
- Кабели
- 2 шт. 8-pin JST-SH, для подключения к портам IO_1 и IO_2.
- 2 шт. 4-pin JST-SH, для подключения к портам UART1 / UART2 / SWD / I2C1
Контакты boot [править]
- Предназначены для восстановления прошивки (запуска внутреннего загрузчика процессора).
- Контакты разомкнуты — обычная загрузка: работает программа прошивки.
- Контакты замкнуты — запуск загрузчика процессора для прошивки.
Мастер настройки — шаг за шагом.
1 — Начальная страница мастера с приветствием.
Внимание: снимите пропеллеры перед запуском мастера!
2 — Затем будет предложено загрузить последнюю прошивку в вашу плату CC3D, для того чтобы версии GCS и прошивки на борту совпадали.
3 — Страница определения типа платы.
4 — Определение типа приемника RX
Выбор любого типа приемника, кроме PWM приведет к автоматической перезагрузке.
5 — Выбор платформы на которую установлена плата CC3D (пока поддерживаются только мультикоптеры и самолеты). Остальные настраиваются вручную.
7 — Выбор скорости обновления сигнала ESC.
8 — Позволяет подключить GPS, если возможно для данного типа платы.
При нажатии на Connection Diagram появляется схема подключения приемника и моторов
10 — Калибровка гироскопов по уровню. Убедитесь, что ваш квадрокоптер установлен по уровню.
Внимание: снимите пропеллеры, перед выполнением операции!
13 — Калибровка каждого мотора. Подключите аккумулятор к квадрокоптеру. Эта процедура аналогична для всех моторов (далее калибровка мотора 1)
- Нажмите «Start»
- Медленно двигайте слайдер, пока мотор не начнет вращаться
- Нажмите «Stop»
- Далее нажмите «Next» , для калибровки остальных моторов.
14 -Следующий шаг позволяет выбрать начальные настройки из Облака для вашего квадрокоптера.
15 — Сохраните настройки в плату.
16 — На этом настройки завершены. Нажмите «Finish», чтобы выйти из мастера или нажмите «Radio Setup Wizard» для настройки радио..
источник
Мастер настройки cc3d
Мастер настройки позволяет выполнить первоначальные установки платы CC3D, включая настройку передатчика.
После запуска Graund Control Station (GCS),мастер настройки можно запустить нажав зеленую кнопку Vehicle Setup Wizard.
Убедитесь, что плата подключена к USB порту перед запуском мастера.
Настройка [править]
После обновления прошивки до первого полёта необходимо выполнить ряд шагов по настройке.
- Выбрать расположение платы (отклонение от «нормального», совпадающего с меткой направления «вперёд» на верхней стороне платы.
- Откалибровать датчики
- Настроить порты последовательной передачи данных.
- При нестандартной конфигурации рамы коптера выбрать соответствующий микшер моторов (по умолчанию выбран Quad X).
- Настроить приём управляющих сигналов с приёмника, проверить/настроить соответствие каналов управления, средние и крайние (1000-2000) точки значений управляющих сигналов.
- Настроить мониторинг напряжения батареи.
- Настроить выходы управляющих сигналов на регуляторы моторов или на сервомашинки.
- Проверить калибровку регуляторов и при необходимости перекалибровать.
- Настроить выбор режимов полёта на переключатели пульта управления.
- Настроить арминг/дизарминг.
- Проверить настройку FailSafe.
- Сделать резервную копию настроек (Backup).
Настройка квадрокоптера программами mission planner, dji nazа assistant, openpilot , librepilot, cleanflight на сайте www.radiocopter.ru
Настройку квадрокоптера производят при помощи специализированного программного обеспечения. Не бывает универсальной
программы для настройки. Для каждого полетного контроллера она своя. Например:
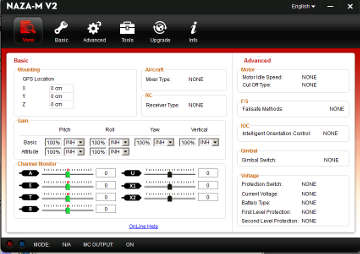
Полетные контроллеры серий APM 2.6/2.7/3.1 и т.п, а так же их разновидности типа DEVO-M, а также 3DR Pixhawk, NAVIO2 и подобные настраиваются при помощи программы Скачать ее Вы сможете здесь | Полетные контроллеры компании DJI, настравиваются своей программой .Это DJI NAZА Assistant. Причем для каждой версии -своя программа. |
Гоночные FPV квадрокоптеры, собранные на контроллерах CC3D, Naze32, Flip32, Spracing F3 настраиваются через свои программы. Это: | Еще одна разновидность программного обеспечения для настройки полетных контроллеров CC3D, Naze32, Flip32, Spracing F3 Cleanflight официальный сайт |

Общий алгоритм настройки квадрокоптеров:
1. Установить программу, подходящую для Вашего полетного контроллера
2. Добиться устойчивого соединения компьютера с платой контроллера.
3. Проверить , настроитьт работу приемник- пульт, приемник должен быть подключен к полетному контроллеру.
Для этого – выбрать нужный Вам режим PPM, PWM, SBUS какой конкретно, смотрите в документации на Вашу аппаратуру.
3.1. Проверить соответствие каналов приемника нужной Вам функции , при необходимости откалибровать
3.2. Настроить режим “Fail safe” – поведение квадрокоптера при потере сигнала с пульта.
3.3. Настроить переключатель полетных режимов квадрика
3.4 Произвести калибровку гироскопов и акселерометров. Проверить результат. В некоторых программах, таких как Mission Planner, LibrePilot и Cleanflight это можно посмотреть прямо на экране монитора.
3.5. Проверить правильность вращения двигателей.
Примечание:
Мехнизм настройки квадрокоптеров будет отличаться для каждой программы.
Все настройки должны делаться без пропеллеров !!!!!
При сборке квадрокоптера опирайтесь на техническую документацию, а не на цвет проводов, который Вы увидели в Ютубе.
Недостатки [править]
- Не могут одновременно работать три MSP порта.
- Не могут быть одновременно активными опции MSP и SERIAL RX.
- Не может летать по GPS с официальной прошивкой, но см. FAQ
Нижняя сторона платы [править]
А. Барометр (датчик давления, только в версии Deluxe)
Обновление прошивки [править]
Рекомендуется установить на плату SP Racing F3 самую свежую прошивку перед тем, как настраивать и готовить коптер к полёту, чтобы иметь в распоряжении все актуальные возможности полётного контроллера с максимальным количеством исправленных ошибок.
- В CleanFlight Configurator перейти на вкладку Firmware Flasher.
- В выпадающем списке выбрать самую свежую и стабильную (stable) прошивку SPRacingF3.
- Отметить галочку «Manual Baud Rate» и выбрать скорость 256000.
- Нажать кнопку «Load Firmware [Online]» и дождаться загрузки прошивки (необходимо соединение с интернетом).
- Нажать кнопку «Flash Firmware».
Особенности [править]
- Богатые возможности ввода/вывода сигналов. Можно использовать все возможности одновременно, например: OSD SmartPort SBus GPS светодиодные ленты мониторинг батареи сонар 8 моторов.
- Выделенный выход для программируемых светодиодов.
- Выделенный порт I2C для подключения OLED-дисплея
- Может принимать управляющие сигналы с приёмников SBus, SumH, SumD, Spektrum1024 / Spektrum2048, XBUS, PPM, PWM.
- Поддержка сонара для точного вертикального позиционирования на малых высотах.
- Возможность подключения зуммера («пищалки») для звуковых уведомлений
- Возможность мониторинга батареи
- Полная поддержка Oneshot125
- SPRacingF3 построен на процессоре ARM Cortex-M4 72МГц CPU с математическим сопроцессором (FPU) для эффективных вычислений в полете. Этот процессор работает примерно в 2 раза быстрее, чем STM32F1 предыдущего поколения.
- SPRacingF3 работает с открытым исходным кодом Cleanflight.
Питание [править]
- CopterControl может быть запитан несколькими способами. Через USB порт, через контакты питания на разъеме сервы или через разъем порта приемника. Когда плата запитана от USB порта, на подключенные периферийные устройства (приемник, последовательные порты, ESC) не будет подано питание для защиты вашего компьютера.
- Минимальное входное напряжение для платы CopterControl 4.8V, максимальное 15V.
- Вывод питания обеспечивает не регулируемое напряжение на портах. Если полетный контроллер запитан от 15V(максимальное напряжение), тогда 15V будет на выходах питания, что приведет к повреждению приемника, GPS, модемов телеметрии или других дополнительных плат.
Питание есть, но плата признаков жизни не подаёт [править]
Могла выйти диодная сборка (диод шотки BAT54C), см. фото справа. Если на 5 ногу стабилизатора (LE33) не приходит 5В с 5-вольтовой линейки из разъёмов для регулей, то стабилизатор не подает 3.3 вольта, процессор не работает. Заменить можно двумя диодами.
Проверить можно измерив напряжение на диоде, на одной из ног (где две ноги с одной стороны) должно 5В поступать при включении платы.
Платы разработки [править]
У арминга переключателем есть как преимущества, так и недостатки. Но полётный контроллер с прошивкой CleanFlight позволяет эффективно решить все проблемы.
Особенности арминга двумя переключателями:
- обеспечивается двойная защита от несанкционированного арминга (коптер заармится только если оба переключателя включены).
- при посадке коптера легко дизармить его в нескольких сантиметрах от земли: перед посадкой, находясь на любых комфортных высоте и расстоянии, нужно выключить один из переключателей, а на минимальной высоте непосредственно перед посадкой – выключить второй или просто убрать газ в 0, а перед тем, как взять коптер в руки – в любом случае выключить оба переключателя.
- если случайно задеть один из переключателей, то, хотя и будет послан сигнал выключения режима ARM, но коптер будет продолжать лететь до тех пор, пока газ не будет убран в 0.
- для дизарма коптера в экстренном случае (не зависимо от ручки газа) нужно просто выключить их оба одним движением – ладонью.
Порядок настройки:
1. Настроить два переключателя на пульте управления. Один должен действовать на канал газа: в выключенном положении канал газа всегда -100%, во включенном – канал газа как обычно зависит от положения стика газа; другой – просто передавать на отдельный канал -100% или 100%.
2. В настройках коптера параметр выключить disarm_kill_switch:
set disarm_kill_switch = OFF save
В итоге, два переключателя работают следующим образом:
- Thr и Rud выключены – коптер задизармен, канал газа в нуле независимо от положения ручки газа (режим ARM не активен)
- Thr или Rud включен – коптер задизармен, но канал газа теперь реагирует на ручку газа (режим ARM не активен)
- Thr и Rud оба включены – коптер заармлен (режим ARM активирован)
См.
Вкратце суть:
- Начинать со стоковых или сниженных настроек.
- Сначала поднимается P до начала осцилляций, находится максимальная точка, затем немного понижается до момента, когда осцилляции уйдут, но коптер будет отзывчив, стабилен на ветру и при подгазовках.
- Коэффициент I настраивается по принципу: если при спусках коптер раскачивает, и заданный угол со временем уплывает – нужно поднять значение, если медленная раскачка проявляется при добавлении газа – уменьшать.
- Значение D следует подбирать на основе того, как ведёт себя коптер по окончании поворота. Сделайте флип, или просто резкий поворот и смотрите на окончание маневра. Если коптер “пролетает” нужную точку а потом возвращается в неё, следует добавить D, пока не получится идеальной реакции. Если коптер слишком вялый и медленно завершает маневры – следует снизить. После повышения D можно попробовать вернуться в п.2 и уточнить значение P.
- Если при резкой подгазовке появляются осцилляции, но в висении и спокойном полёте такого нет – стоит добавить TPA. Точка начала подбирается чуть ниже уровня газа, с которого начинается дёрганье, коэффициент подстраивается экспериментально, чтобы при большом уровне газа не было осцилляций, но сохранялась стабильность.
См. также общую теорию настройки PID-регулятора.
Подключение контроллера [править]
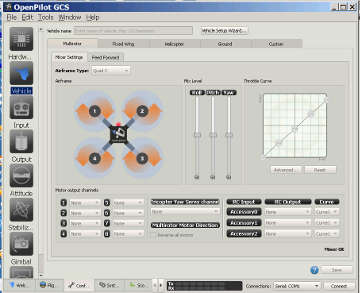
Полетный контроллер CC3D — это плата стабилизации, который работает под управлением OpenPilot. CC3D может быть настроена для управления любым аппаратом: от самолета до октокоптера с использованием программы OpenPilot Ground Control Station (GCS) Инструкция по установке
По состоянию на 2023 год, OpenPilot больше не поддерживает плату CC3D, поэтому лучше всего сразу устанавливать прошивку LibrePilot.
Порт i2c1 [править]
- Предназначен для подключения внешних датчиков и/или ЖК-экрана.
- Сигналы SCL и SDA должны быть 3.3В.
- Внимание! Для согласования уровней сигналов потребуются конвертеры 5В-3.3В, если датчики рассчитаны на сигналы с уровнем 5В.
- Выход питания 5В постоянно обеспечивается встроенным стабилизатором напряжения, даже при подключении только USB-кабеля.
Порт io_1 [править]
- Предназначен для подключения приёмников PWM/PPM, GPIO и светодиодной подсветки.
- При использовании PWM-приёмника следует подключить его каналы CH1/CH2/CH5/CH6 к контактам 3/4/5/6.
- При использовании PPM-приёмника следует подключить его сигнал к контакту 3 (CH1).
- Если не используется PWM- или PPM-приёмник, то контакты CH1/2/5/6 могут быть использованы для других целей.
- Возможно гибкое управление светодиодной подсветкой через контроллер WS2812: предупреждение о разряде батарей, навигационные огни, индикация полётных режимов и состояния, срабатывание Fail Safe и т.п.
- 3.3v — выход для питания внешних устройств.
Порт io_2 [править]
- Предназначен для подключения приёмников PWM или с последовательной передачей каналов, GPIO, UART3.
- При использовании PWM-приёмника следует подключить его каналы CH3/CH4/CH7/CH8 к контактам 3/4/5/6.
- При использовании приёмника с последовательной передачей каналов (Serial RX: S.Bus, SUMD/H и т.п.) следует подключать к сигналам GND/VCC/CH3 (UART3 RX).
- Входы CH7/8 могут быть использованы для подключения 3.3-вольтового сонара, если используется не PWM-приёмник.
- Входы ADC_1/2 могут быть использованы для подключения датчика тока и сигналов RSSI. (Уровень сигналов максимум 3.3В).
Порт swd/debug [править]
- Предназначен для отладки в процессе разработки или для прошивки через SWD. Используйте отладчики ST-Link OpenOCD или J-Link
- Не может быть использован одновременно с включенным UART2.
Порт uart1 [править]
- Предназначен для последовательного обмена данными с устройствами с питанием 5В (OSD и другие).
- Не должен использоваться при подключении кабеля к USB-разъёму.
Порт uart2 [править]
- Предназначен для последовательного обмена данными с устройствами с питанием 5В (GPS и другие).
- Не должен использоваться при задействованном порте SWD.
Порт uart3 [править]
- Предназначен для последовательного обмена данными с устройствами с питанием 3.3В (приёмники с последовательной передачей каналов и другие).
- Не должен использоваться при задействованном PWM RX.
- Не должен использоваться одновременно с использованием каналов CH3/4 порта IO_2.
При установки на коптер не хватает места [править]
Это распространенная проблема, но есть решение: к примеру, в программе настройки развернуть по рудеру на 90° или на -90°.
Проблемы с компасом [править]
Если компас особо не нужен (например, на гоночном FPV-миникоптере), то его обязательно отключать, так как из-за того, что он распаян на плате, он ведет себя неадекватно.
источник
Проверка работоспособности [править]
Проверка работоспособности полётного контроллера Seriously Pro Racing F3.
- Плата SP Racing F3 должна быть отключена от компьютера.
- От платы должны быть отсоединены все разъёмы и отпаяны все провода.
- Установить на компьютер свежие драйвера для встроенного в плату адаптера Silicon Labs CP2102 USB -> UART
- Установить в браузер Chrome и запустить программное обеспечение для настройки CleanFlight Configurator.
- Подключить плату SP Racing F3 к компьютеру через USB-кабель.
- В CleanFlight выбрать соответствующий подключению COM-порт, если он не был выбран автоматически.
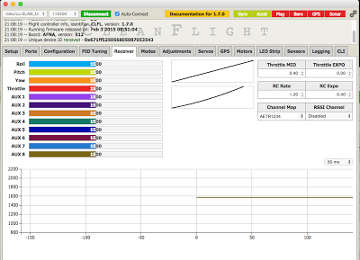
- Нажать кнопку «Connect» и убедиться, что соединение установлено (см. вид экрана справа).
- Перейдите во вкладку «Sensors», перемещайте/вращайте плату SP Racing F3 и смотрите на показания датчиков на графиках (см. вид экрана справа), чтобы убедиться, что все они работают правильно.
- Разорвите соединение кнопкой «Disconnect».
Распиновка разъема сервы cc3d [править]
- Внешний >Земля
- Средний > 5V — 15V
- Внутренний > Сигнал
- Основной порт(раньше назывался порт телеметрии): JST-SH 4-пина. Порт телеметрии.
- FlexiPort: JST-SH 4-пина. Данный порт планируется для подключения устройств I2C.
- Порт приемника (ReceiverPort) : JST-SH 8-пиновый.
- Порт приемника может служить, как вход так и выход в зависимости от конфигурации.
Советы [править]
- При калибровке регуляторов скорости выбирайте тип не «Обычные регуляторы», а «Скоростные» обычно меньше проблем возникает.
- CC3D можно прошить двумя типами прошивок:
- BIN — не затирается bootloader от OpenPilot и можно в любой момент откатиться на OpenPilot. В этом случае нет AUTOTUNE и для подключения по USB надо сначала подать питание на контроллер и подождать загрузки.
- HEX — затирается bootloader от OpenPilot. В этом случае есть AUTOTUNE и можно просто подключать USB.
Список поддерживаемых контроллеров [править]
В целом CleanFlight поддерживает контроллеры на основе процессоров серий
и более ранней
. Ядро написано с максимальной абстракцией от «железа» для возможностьи портировать CleanFlight на контроллеры с другими процессорами.
Чтобы получить все возможности Cleanflight, рекомендуется использовать контроллеры на основе процессора STM32 F3 с flash-памятью не менее 256Кб. Меньшее количество памяти могут ограничить количество функций.
Платы с пометкой Revo и Quantum имеют процессор STM32 F4, для них требуется другая прошивка.
Все контроллеры имеют свои плюсы и минусы. При выборе важно проверить, имеет ли плата достаточное количество последовательных портов и контактов ввода/вывода для оборудования, которое вы хотите использовать, и что их можно использовать одновременно. На некоторых платах это взаимоисключающие возможности.
Схемы подключений [править]
Как подключить все компоненты к плате CC3D:
Схема подключения FPV, GPS и OSD.
Характеристики [править]
- Размер платы: 35×35мм, толщина 5мм
- Расстояния между отверстиями: 30,5мм
- Вес: 5 г
- Процессор STM32F303 с flash-памятью 256КБ.
- Может выпускаться (оригинал и клоны) с разными датчиками гироскоп акселерометр: MPU-6050 (в оригинальном SPRacingF3, поддерживает только I2C), MPU-6000 (поддерживает I2C и SPI), BMI160 от Bosch, MPU9250.
- Барометр: MS5611 (версия Deluxe 10DOF)
- Компас: HMC5883 (версия Deluxe 10DOF)
- MicroUSB

 (LiPo) - 94182PRO")





