

- Основные правила изготовления
- Шаг 3: изготавливаем основу и заднюю ось
- Что нам понадобится
- Итак, что нужно для изготовления рации?
- Детекторный простейший радиоприемник: основы
- Diy радиоуправляемая двух-канальная машинка
- Инструкция
- Как и чем управлять
- Как сделать рацию своими руками — 3 рабочие схемы
- Как сделать рацию своими руками — простая схема
- Как собрать простой радиоприёмник?
- Конструкция антенны
- Многоканальное управление
- Моя модернизация
- Необходимые первые шаги до открытия
- Передающая часть
- Подготовка к деятельности
- Последовательность монтажа
- Пошаговая инструкция по сборке радиостанции своими руками
- Программная реализация
- Пульт радиоуправления моделями своими руками
- Пуск!
- Рация fm диапазона своими руками в домашних условиях
- Реализация в железе
- Схема простой радиостанции
- Шаг 2: детали
- Шаг 4: изготавливаем самодельный рулевой механизм
- Шаг 5: изготавливаем картонные колёса
- Шаг 6: создаём электроуправление
- Шаг 7: соединяем компоненты
- Шаг 8: создаём элементы кузова
Основные правила изготовления
Приёмник, изготовленный в домашних условиях, должен быть мобильным или возимым. Советские магнитолы VEF Sigma и «Урал-Авто», более современный Manbo S-202 – тому пример.
Приемник содержит минимум радиоэлементов. Это несколько транзисторов или одна микросхема, без учёта навесных деталей в схеме. Они не должны стоить дорого. Вещательный приёмник, обходящийся в миллион рублей, – почти фантастика: это не профессиональная рация для военных и спецслужб.

Нужна шкала (или хотя бы разметка на ручке настройки), позволяющая прикинуть, какой диапазон и какая частота прослушивается. Многие радиостанции напоминают слушателям, на какой частоте производится вещание. Но повторять 100 раз в день, например, «Европа Плюс», «Москва 106,2» уже не в моде.
Приемник должен быть пыле- и влагозащищённым. Это обеспечит корпус, например, от мощной колонки, в которой есть резиновые вставки. Самому сделать такой корпус тоже можно, но он герметично закрыт почти со всех сторон.

Шаг 3: изготавливаем основу и заднюю ось
- Отрежьте кусок картона примерно 10*25 см
- Основываясь на картинке сверху, вырежьте основу для машинки F1
- Вырежьте деревянную палочку длиной 10см и сделайте на ней три отметки, как показано на картинке
- Возьмите пластиковую шестерёнку и просверлите отверстие, равное диаметру деревянной палочки
- Закрепите шестерёнку на второй отметке и приклейте её суперклеем
- Закрепите подшипники на остальных двух отметках и также закрепите их суперклеем
Заметка: Для увеличения диаметра палочки можно использовать изоленту.
Что нам понадобится
1. Транзисторы: МП42 — 4шт и П416Б — 3шт2. Резисторы: 3К — 2шт, 6.8К — 6шт, 100К, 120К, 160К — 2шт, 270К, 4.7К — 2шт, 22К, 36К3. Конденсаторы: 3300МК — 2шт, 100МК — 2шт, 6МК — 2шт, 10МК*10В — 2шт, 22МК, 10МК, 1000МК — 2шт, 0.047МК, 5МК*10В — 4шт, 5-20МК — 2шт4. Антенна5.
Итак, что нужно для изготовления рации?
Для создания рации вам потребуются следующие предметы:
- 4 транзистора МП-42 и 3 транзистора П416Б;
- Резисторы. Их потребуется немало: по две шт. 3К, 160К, 4,7К, по одной – 22 К, 36 К, 100 К, 120 К, 270 К, и шесть шт. 6,8 К;
- Конденсаторы: по два 10 МК 10 В, 3300, 1000, 100, 6, 5-20, 22, 10 и один 5 МК 10 В – 4; 0, 0, 47 МК.
- Телескопичная антенна;
- Микрофоны и динамики;
- Платы из текстолита — 2 шт.
- Паяльник;
- Розетка;
- Кусачки.

Практически все из вышеперечисленного входит в специальный набор для радиолюбителей JC986A. Дальнейший алгоритм будет опираться на данный набор.

Стоит учесть то, что создание собственной рации требует навыков работы с паяльником и знаний того, как определить номиналы элементов.

Детекторный простейший радиоприемник: основы
Зубных пломб рассказ коснулся неспроста. Сталь (металл) способна преобразовывать эфирные волны в ток, копируя простейший радиоприемник, челюсть начинает вибрировать, кости уха детектируют сигнал, зашифрованный на несущей. При амплитудной модуляции высокая частота повторяет размахом голос диктора, музыку, звук.
Полезный сигнал содержит некоторый спектр, сложно пониманию непрофессионала, важно, что при сложении составляющих получается некоторый закон времени, следуя которому, динамик простейшего радиоприемника воспроизводит вещание. На провалах челюстная кость замирает, воцаряется тишина, пики ухо слышит. Простейший радиоприемник, не дай Бог, конечно, заиметь.
Обратный пьезоэлектрический эффект изменяет согласно закону электромагнитной волны геометрические размеры костей. Перспективное направление: человек-радиоприемник.

Советский Союз славился запуском космической ракеты, впереди планеты всей, научными изысканиями. Времена Союза поощряли степени. Светила принесли немало пользы здесь, – конструирование радиоприемников, – зарабатывают приличные деньги за бугром. Фильмы пропагандировали умных, не зажиточных, неудивительно, что журналы полны различными наработками.
Концепция персональной электронно-вычислительной машины разработана советскими инженерами. Руководством партии идея признана неперспективной. Силы отданы построению гигантских вычислительных центров. Излишне трудящемуся осваивать дома персональный компьютер. Смешно? Сегодня ситуации позабавнее встретите. Потом жалуются – Америка окутана славой, печатает доллары. AMD, Intel – слышали? Made in USA.
Простейший радиоприемник своими руками сделает каждый. Антенна не нужна, существуй хороший устойчивый сигнал вещания. Диод припаивается к выводам высокоомных наушников (компьютерные отбросьте), остается заземлить один конец. Справедливости ради скажем, фокус пройдет со старыми добрыми Д2 советского выпуска, отводы настолько массивные, что послужат антенной.
Землю получим в простейшем радиоприемнике, прислонив одну ножку радиоэлемента к батарее отопления, зачищенной от краски. В противном случае декоративный слой, являясь диэлектриком конденсатора, образованного ножкой и металлом батареи, изменит характер работы. Пробуйте.

Авторы ролика заметили: сигнал вроде есть, представлен невообразимой мешаниной шорохов, осмысленных звуков. Простейший радиоприемник лишен избирательности. Любой может понять, осознать термин. Когда настраиваем приемник, ловим нужную волну. Помните, обсуждали спектр.
- Конденсатор (емкость).
- Катушка индуктивности.
Повременим изучать подробности, элементы снабжены реактивным сопротивлением. Благодаря чему волны различной частоты имеют неодинаковое затухание, проходя мимо. Однако существует некий резонанс. У конденсатора реактивное сопротивление на диаграмме направлено в одну сторону, у индуктивности – в другую, причем выведена зависимость частотная.

Курс физики показывает процесс выбора ширину полосы пропускания резонансного контура. Определяется уровнем затухания (3 дБ ниже максимума). Приведем выкладки теории, руководствуясь которыми человек может собрать простейший радиоприемник своими руками.
Параллельно первому диоду добавляется второй, включенный навстречу. Впаивается последовательно наушникам. Антенна отделяется от конструкции конденсатором емкостью 100 пФ. Здесь заметим: диоды наделены емкостью p-n-перехода, умы, видимо, просчитали условия приема, какой конденсатор входит в простейший радиоприемник, наделенный избирательностью.
Полагаем, несильно отклонимся от истины, сказав: диапазон затронет области КВ или СВ. Будет приниматься несколько каналов. Простейший радиоприемник является чисто пассивной конструкцией, лишенной источника энергии, больших свершений ждать не следует.
Пара слов, почему обсуждали удаленные закутки, где радиолюбители жаждут экспериментов. В природе замечены физиками явления рефракции, дифракции, оба позволяют радиоволнам отклоняться от прямого курса. Первое назовем огибанием препятствий, горизонт отодвигается, уступая вещанию, второе – преломлением атмосферой.
ДВ, СВ и КВ ловятся на значительном удалении, сигнал будет слабым. Следовательно, простейший радиоприемник, рассмотренный выше, является пробным камнем.
Diy радиоуправляемая двух-канальная машинка
Здравствуйте, в этой статье соберем набор радиоуправляемой машинки
Машинка работает на двух батарейках типа АА 1.5V управляется двух канальным пультом.

Набор получаем в запаянном пакете.
Комплектация:
— пластиковая крепежная площадка 75 х 120 мм.
— колеса (4шт.) в диаметре 40 мм.
— пластиковые шайбы (устанавливаются на ось между колесами и основной пластиной)
— болтики, гайки, крепежные уголки.
— коллекторный электро моторчик
— бокс под две батарейки типа АА 1.5V.
— бокс из ползунковым выкл/вкл. под две батарейки типа АА 1.5V.
— радиоприемник передатчик
— антенны (2 шт.)
— инструкция по сборке набора

С комплектации берем вот эти уголочки и крепим их болтиками к основной пластине.


Колеса уже на своем месте)))
Замучу что пластиковые шайбы размещаем на оси между колесом и основой машины.
Как видим в комплекте идут по две одинаковые шестерни, нам пригодится только пара, маленькая шестерня на мотор и большая на вал колес.
В итоге в запас получаем пару запасных шестерен.
Ставим следующую пару колес.
Большую шестерню продеваем на ось колес.


Смотрим место под установку мотора.
Как понятно шестерня на валу мотора будет передавать усилие на большую шестерню одетую на оси колес.
Я думаю ребенок правильно собрал этот узел, чему я рад, все таки это не первый собранный такого плана набор.

Установили ползунковый выключатель.
Закрепили одним болтиком ползунковый выключатель.
Расположили и зафиксировали кассету под установку батареек.
Пора рассматривать модуль радиопередатчика и приемника.


Маркировка на плате:
— В (подключение питания платы, плюсовой контакт)
— В- (подключение питания платы, минусовой контакт, подключим его через выключатель)
— F (вывод подключения мотора)
— F (вывод подключения мотора)
— ANT (провод идущий на антенну)

Почему ребенок держит паяльник в левой руке? Ему так удобнее он и пишет левой.

По идее плата радиоприема должна быть на месте батарейного отсека, я об этом говорил ребенку, но он решил разместить большой вес по центру машины,

Тык, вроде все на месте.

Собственно детали пульта управления:
— бокс под две батарейки типа АА 1.5АА
— антенна
— модуль радиопередатчика
Батарейки в комплект не идут.


Крышка отсека фиксируется саморезом, заменив его на чуть больше размером прижимаем крышу и модуль.
Рассматриваем подключения радиопередатчика.
Здесь проще простого, соединяем провода по цветам.
Решили не соединять провода, а припаять идущие провода от бокса к плате.
На аккумуляторной коробке находится ползунковый выключатель, то есть, им будем выключать пульт управления.
Размер машинки 12 x 11.7 x 4 cм.

С управлением все понятно, на пульте находятся две кнопки вперед/назад.
Итог, здесь особо и ничего написать, мне главное что ребенок доволен и при этом получил опыт работы с паяльником (он долго ждал когда уже начнутся паяльные работы)
Радиус действия РУ по прямой видимости около 8 м.
На данное время рассматриваем элементную базу, конечно нам это сложно все таки первый класс, но что-то в памяти отложится.
Предлагаю к просмотру видео о сборке и первому запуску машинки (видео в ускоренном режиме).
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Инструкция
Собирать рацию будем по проверенной схеме:

А1 – общая антенна для получения и отправки сигналаSA1 – выключатель питанияSA2 – переключатель, соединяющий источник тока и радиостанцию.
1. Делаем катушки:
a. Берем для изготовления цилиндрической основы диаметром 0.8 см и высотой 2 см оргстекло, полистирол или картон.b. Обматываем основу медной проволокой с диаметром 0.5 мм плотными витками.c. На катушки L1 и L5 наматываем по десять витков.d.
Катушку L2 и L3 будем наматывать на одной основе, соблюдая условия:e. На катушку L2 наматываем четыре витка.f. Помещаем L2 между обмотками L3.g. L3 будет состоять из 8 витков с отводом проволоки посередине.h.
2. В результате должно получиться, как указано на рисунке:

3. Теперь подготавливаем печатную плату4. Располагаем радиодетали согласно схеме.

5. Делаем печатный монтаж из фольгированного гетинакса.6. Изготавливаем каркас из сантиметровых обрезков медной проволоки, вставленных в дырочки с диаметром около одного миллиметра.
Теперь надо настроить рацию:
1. Отладку начинаем с улучшения сигнала:
a. Подсоединяем переменный резистор на 33-47 кОм вместо R10.b. Добиваемся максимально громкого шума.c. Меняем уровень индуктивности катушки L5, регулируя сердечник.d. Добиваемся улучшения сигнала.e. Заменяем подсоединенный переменный резистор на R10 с нужным сопротивлением.
2. При искажении тембра голоса во время передачи сигнала, более тщательно подбираем резисторы R1 и R3.
3. Отладку генератора и антенны производим с помощью волномера, его электронная схема указана ниже.Волномер:

4. Для катушки L1 волномера из десяти витков проволокой 1.2 мм используем каркас диаметром 22 мм, третий снизу виток служит отводом.5. Конденсатор С1 волномера нужно сделать переменным.6. Ручку С1 волномера располагаем напротив действующей частоты рации.7.
Помещаем волномер так, чтобы рядом с катушкой L3 рации находилась катушка L1 волномера.8. Таким образом, делаем ее своеобразным индикатором.9. Пробуем вместо С9 рации конденсаторы разной емкости.10. Добиваемся максимального отклонения стрелки волномера.11.
Как и чем управлять
Нормальные люди берут приемник, втыкают в него сервомашинки, регулятор скорости, двигают рычажки на пульте и радуются жизни не задаваясь принципами работы и не углубляясь в подробности. В нашем случае такое не пройдет. Первой задачей стало узнать каким макаром управляются сервомашинки.
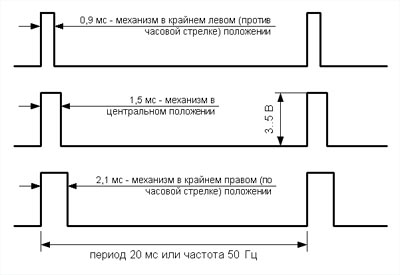
Итак, если мы хотим установить привод в крайнее левое положение нужно слать импульсы длительностью 0,9мс с интервалом 20мс, если в крайнее правое — длительность 2,1мс, интервал тот же, ну со средними положениями аналогично. Как оказалось, регуляторы скорости управляются аналогично. Те, кто в теме скажут что это
, который реализовать на любом микроконтроллере — плевое дело. Вот и я так решил, купил в местном магазине сервомашинку и склепал на макетке для нее так называемый сервотестер на ATtiny13. И тут оказалось, что ШИМ не совсем простой, а с подводными камнями.
Как видно из вышеприведенной диаграммы, скважность (отношение длительности импульса к длительности периода) от 5% до 10% (в дальнейшем я за крайние положения принимаю импульсы длительностью 1,0мс и 2,0мс) для 256-значного ШИМ счетчика ATtiny13 это соответствует значениям от 25 до 50.
Но это при условии, что на заполнение счетчика уйдет 20мс, а на деле так не получится и для частоты 9,6МГц и предделителя 1024 нужно ограничить счетчик значением 187(ТОР), в таком случае у нас получится частота 50,134Гц. В большинстве (если не во всех) сервомашинок нету точного генератора опорной частоты и поэтому частота управляющего сигнала может немного плавать.
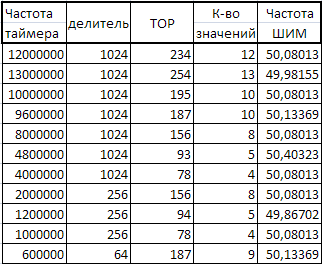
Если оставить ТОР счетчика 255, то частота управляющего сигнала будет 36,76Гц — на некоторых приводах оно будет работать (возможно с глюками), но далеко не на всех. Итак, теперь у нас 187-значный счетчик, для него 5-10% соответствуют значениям от 10 до 20 — всего 10 значений, немного дискретно получится. Если думаете поиграть с тактовой частотой и предделителем ниже привожу сравнительную табличку для 8-битного ШИМа:

Я не думаю, что для китайской сервомашинки есть существенная разница в 600 и 1200 значений, поэтому вопрос с точностью позиционирования можно считать закрытым.
Как сделать рацию своими руками — 3 рабочие схемы
- Простая схема
- Рация FM диапазона своими руками
- Как сделать рацию для переговоров — схема, инструкция
- Видео
Сегодня мы рассмотрим три самые простые и рабочие схемы для создания раций своими руками. Первый проект предполагает изготовление прибора новичками по самой простой схеме. Рекомендации, пошаговые фото и инструкция по монтажу помогут разобраться во всех нюансах монтажа.
Второй проект — рация FM диапазона. В изготовлении это устройство немного сложнее, зато начинающим радиолюбителям не составит труда настроить передатчик по обычному вещательному FM приёмнику. Третий проект — переговорная рация. Рекомендуем создавать сразу 2 прибора, которые можно будет использовать для связи в бытовых условиях.
Как сделать рацию своими руками — простая схема

Представляем простую и рабочую схему рации, которую можно собрать своими руками.
Как собрать простой радиоприёмник?
Есть несколько схем радиоприёмников:
- детекторная;
- прямого усиления;
- (супер) гетеродинная;
- на синтезаторе частот.
Приёмники с двойным, тройным преобразованием (2 или 3 гетеродина в схеме) применяются для профессиональной работы на предельно допустимых, сверхдальних расстояниях.

Минус детекторного приёмника – низкая избирательность: одновременно слышны сигналы нескольких радиостанций. Достоинство – нет отдельного электропитания: энергии приходящих радиоволн хватает, чтобы прослушивать эфир без электропитания всей схемы.
В вашей местности должен вещать хотя бы один ретранслятор – в диапазоне длинных (148-375 килогерц) или средних (530-1710 кГц) частот. При удалении от него на 300 км и более вы вряд ли что-то услышите. Вокруг должно быть тихо – слушать передачу лучше в наушниках с высоким (сотни и тысячи ом) сопротивлением. Звук будет еле слышимым, но и речь, и музыку разобрать удастся.
Собирается детекторный приёмник следующим образом. Колебательный контур состоит из переменного конденсатора и катушки. Один его конец подключается к внешней антенне. Заземление подаётся через контур здания, трубы отопительной сети – на другой конец контура.
Последовательно с контуром включён любой ВЧ диод – он выделит звуковую составляющую из ВЧ сигнала. К параллельно получившейся сборке подключается конденсатор – он сгладит пульсации. Для извлечения звуковой информации применяется капсюль – сопротивление его обмотки не менее 600 Ом.
Если отключить наушник от ДП и подать сигнал на простейший звуковой усилитель, то детекторный приёмник станет приёмником прямого усиления. Подключив на вход – к контуру – усилитель радиочастоты СВ или ДВ диапазона, вы повысите чувствительность. Можно удалиться от АМ ретранслятора до 1000 км. Приёмник с простейшим диодным детектором не работает на (У) КВ диапазоне.
Чтобы повысить селективность по соседнему каналу, замените детекторный диод на более эффективную схему.

Чтобы обеспечить селективность и по соседнему каналу, нужны гетеродин, смеситель и дополнительный усилитель. Гетеродин – местный автогенератор с переменным контуром. Схема гетеродинного приёмника работает следующим образом.
- Сигнал поступает с антенны на усилитель радиочастоты (УРЧ).
- Усиленный ВЧ сигнал проходит через смеситель. На него накладывается сигнал гетеродина. Смеситель – это вычитатель частоты: из значения входного сигнала отнимается значение гетеродина. Например, чтобы принять станцию на 106,2 МГц в FM-диапазоне, частота гетеродина должна быть 95,5 МГц (остаётся 10,7 для дальнейшей обработки). Величина 10,7 постоянна – смеситель и гетеродин настраиваются синхронно. Рассогласование этого функционального узла сразу же приведёт к неработоспособности всей схемы.
- Полученная промежуточная частота (ПЧ) в 10,7 МГц поступает в блок УПЧ. Сам УПЧ выполняет функцию селектора: его полосовой фильтр урезает спектр радиосигнала до полосы всего лишь в 50-100 кГц. Так обеспечивается избирательность по соседнему каналу: в плотно забитом FM-диапазоне большого города радиостанции располагаются через каждые 300-500 кГц.
- Усиленная ПЧ – сигнал, готовый к переносу из области радиочастот в область звуковых. Амплитудный детектор преобразует AM-сигнал в звуковой, выделяя НЧ огибающую радиосигнала.
- Полученный звуковой сигнал поступает на усилитель низкой частоты (УНЧ) – и далее на динамик (или наушники).

Достоинство схемы (супер) гетеродинного приёмника – удовлетворительная чувствительность. Можно удаляться от FM-передатчика на десятки километров. Селективность по соседнему каналу позволит слушать понравившуюся радиостанцию, а не одновременную какофонию из нескольких радиопередач. Недостаток – вся схема требует питания – несколько вольт и до десятков миллиампер постоянного тока.
Есть и избирательность по зеркальному каналу. У AM-приёмников (ДВ, СВ, КВ диапазонов) ПЧ равна 465 кГц. Если в СВ диапазоне приёмник настроен на частоту 1551 кГц, то эту же частоту он «поймает» и на 621 кГц. Зеркальная частота равна удвоенному значению ПЧ, отнятому от значения частоты передатчика. У FM (ЧМ) приёмников, работающих с диапазоном УКВ (66-108 МГц), ПЧ равна 10,7 МГц.
Так, сигнал от авиационной рации («комарика»), работающей на 121,5 мегагерцах, примется при настройке приёмника на 100,1 МГц (минус 21,4 МГц). Чтобы устранить приём помехи в виде «зеркальной» частоты, между УРЧ и антенной включается входной контур – один или несколько колебательных контуров (катушка и конденсатор, соединённые параллельно).
FM-приёмник оснащён особым каскадом, преобразующим ЧМ в АМ колебания.

Недостаток гетеродинных приёмников – сигнал от гетеродина без входного контура и при наличии обратной связи УРЧ попадает в антенну и переизлучается в эфир. Если включить два таких приёмника, настроив их на одну и ту же радиостанцию, и расположить рядом, вплотную – в динамиках у обоих появится лёгкое посвистывание меняющегося тона. В схеме на основе синтезатора частот гетеродин не применяется.
В стереоприёмниках FM после УПЧ и детектора располагается стереодекодер. Кодирование стереосигнала на передатчике и декодирование на приёмнике осуществляется по пилот-тональной технологии. После стереодекодера ставят стереоусилитель и два динамика (по одному для каждого канала).
Приёмники, не обладающие функцией стереодекодирования, принимают стереотрансляцию в монофоническом режиме.

Чтобы собрать электронику приёмника, сделайте следующее.
- Высверлите отверстия в заготовке под радиоплату, сверяясь с чертежами (топология, расположение элементов).
- Разместите радиоэлементы.
- Намотайте катушки контуров и магнитную антенну. Разместите их согласно схеме.
- Выполните дорожки на плате, сверяясь с топологией из чертежа. Дорожки выполняют как прорезыванием, так и травлением.
- Спаяйте на плате детали. Проверьте правильность произведённого монтажа.
- Припаяйте провода на вход антенны, питания и на выход для динамика.
- Установите регуляторы и переключатели. Многодиапазонная модель потребует многопозиционный переключатель.
- Подключите динамик и антенну. Включите блок питания.
- В динамике появится шум ненастроенного приёмника. Покрутите ручку настройки. Настройтесь на одну из доступных станций. Звук радиосигнала должен быть без хрипов и шумов. Подключите внешнюю антенну. Нужны подстройка катушек, сдвиг диапазона. Дроссельные катушки настраиваются вращением сердечника, бескаркасные – растяжением и сжатием витков. Для них нужна диэлектрическая отвёртка.
- Выберите на FM-модуляторе крайнюю частоту (например, 108 МГц) и подвигайте витки гетеродинной катушки (она располагается рядом с переменным конденсатором), чтобы верхний край диапазона приёмника устойчиво принял сигнал модулятора.

Соберите корпус:
- Разметьте и распилите фанеру или пластик на 6 граней будущего корпуса.
- Разметьте и просверлите отверстия под уголки.
- Выпилите круглый большой зазор для динамика.
- Сверху и/или сбоку выпилите щели под регулятор громкости, выключатель питания, переключатель диапазонов, антенну и ручку настройки частоты, ориентируясь по сборочному чертежу.
- Установите радиоплату на одной из стенок с помощью винтовых стоек «свайного» типа. Соотнесите органы управления с технологическими отверстиями на соседних гранях корпуса.
- Смонтируйте блок питания – или USB-плату с литий-ионной батареей (для мини-радио) – в стороне от основной платы.
- Подключите радиоплату к плате блока питания (или к контроллеру USB и аккумулятору).
- Подключите и закрепите магнитную антенну для AM и телескопическую для FM. Все соединения проводов надёжно заизолируйте.
- Если изготавливается громкоговорящая модель, установите динамик на переднюю грань корпуса.
- С помощью уголков соедините все грани корпуса между собой.
Для шкалы проградуируйте ручку настройки, поставьте рядом с ней на корпусе отметку в виде стрелки. Установите светодиод для подсветки.

8фотографий
Рекомендации для начинающих
- Чтобы не перегреть диоды, транзисторы и микросхемы, не работайте паяльником мощностью более 30 ватт без флюса.
- Не подвергайте приёмник воздействию осадков, тумана и мороза, кислотных паров.
- Не прикасайтесь к выводам высоковольтной части блока питания, когда тестируемое устройство под напряжением.
Конструкция антенны

Антенна сделана мной из толстого алюминиевого провода, с куском изоляции, поверх которой и намотана катушка L3.
Многоканальное управление
С одной сервомашинкой разобрались, но для самолета их нужно минимум три и еще регулятор скорости. Решение «в лоб» — взять микроконтроллер с четырьмя каналами 16-битного ШИМ, но такой контроллер будет стоять дорого и, скорее всего, займет много места на плате.
Второй вариант — запилить программный ШИМ, но занимать процессорное время — это тоже не вариант. Если снова посмотреть на диаграммы сигнала, то 80% времени он не несет никакой информации, поэтому рациональнее было бы ШИМом задавать только сам импульс 1-2мс.
Почему скважность изменяется в таких узких пределах, ведь проще было бы и формировать и считывать импульсы со скважностью хотя бы 10-90%? Зачем нужен тот неинформативный кусок сигнала занимающий 80% времени? Я заподозрил, что, возможно, эти 80% могут занимать импульсы для других исполнительных механизмов, а потом этот сигнал разделяется на несколько разных.
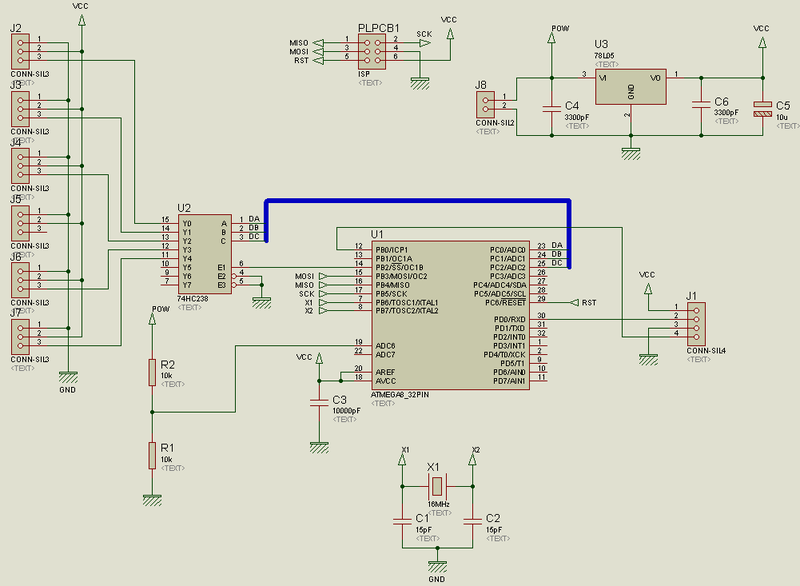
То есть, в периоде длительностью 20мс могут уместится 10 импульсов длительностью 1-2мс, затем этот сигнал каким-то демультиплексором разделяется на 10 различных с длительностью периода как раз 20мс. Сказано — сделано, нарисовал в PROTEUS такую схемку:
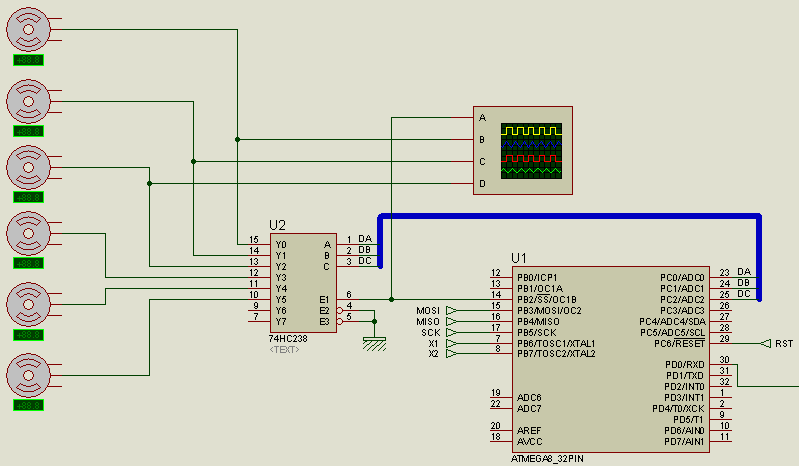
В роли демультиплексора — 74HC238, на его вход E подаются импульсы с выхода микроконтроллера. Эти импульсы — ШИМ с периодом 2мс (500Гц) и скважностью 50-100%. У каждого импульса своя скважность, обозначающая состояние каждого канала. Вот так выглядит сигнал на входе Е:

Для того, чтобы 74HC238 знал на какой выход подать текущий сигнал используем PORTC микроконтроллера и входы A, B, C демультиплексора. В результате на выходах получаем такие сигналы:

Сигналы на выходе получаются правильной частоты (50Гц) и скважности (5-10%). Итак, нужно генерировать ШИМ частотой 500Гц и заполнением 50-100%, вот табличка для настройки предделителя и ТОР 16-битного счетчика:

Интересно, что возможное количество значений ШИМа ровно в 1000 раз меньше частоты таймера.
Моя модернизация
Я делал такую рацию ещё в школе, но тогда уже поменял все транзисторы на более современные и с высоким коэффициентом усиления. К примеру, я заменил VT1, VT2 на КТ361, а VT3 на КТ315.Сейчас я бы конечно поменял полярность питания и полярность конденсаторов, заменил все транзисторы с структуры n-p-n на p-n-p, и p-n-p на n-p-n.
Ну и установил бы современные транзисторы. Требований к транзисторам особо никаких нет, поэтому подойдут абсолютно любые.Автор схемы говорит, что радиус действия однотипных радий на открытой местности – 100-200 метром. Я же разгонял такие рации до 500 метров, для этого использовал современные транзисторы, антенну увеличил до 900 мм, плюс увеличил ток генератора, заменив резистор 100 Ом на 50 Ом.
Необходимые первые шаги до открытия
Первое, с чего стоит начать – это с оформления необходимой документации. Прежде всего нужно открыть юридическое лицо, например, фирму, в уставе которой будут указаны следующие виды деятельности:
- создание телевизионных и радио-проектов;
- рекламы коммерческого и политического характера;
- теле- и радиовещание;
- деятельность, связанная со средствами массовой информации;
- возможность приобретения студийных помещений радиостанций и различных средств, используемых для радиовещания.
Передающая часть
Самолетная часть есть, осталось разобраться с наземной аппаратурой. Как уже писалось ранее, данные передаются по UART, на каждый канал по одному байту. Вначале подключал свою систему проводом через
к компьютеру и команды слал через терминал. Чтобы дешифратор определял начало посылки, а в будущем выделял посылки адресуемые именно ему, вначале шлется байт-идентификатор, затем 8 байт определяющих состояние каналов. Позже стал использовать радиомодули, при отключении передатчика все моторчики начинали дико дергаться.
Дабы отфильтровать сигнал от шумов, десятым байтом шлю XOR всех 9 предыдущих байт. Помогло, но слабо, добавил еще проверку на таймаут между байтами, если он превышается — вся посылка игнорится и прием начинается заново, с ожидания байта-идентификатора.

Число в нижнем левом углу — контрольная сумма. Передвигая ползунки на компе двигались рули на самолете! Вообщем отладил я все это и стал думать о пульте ДУ, купил для него вот такие джойстики:

Но потом меня посетила одна мысль. В свое время я тащился от всяких авиасимуляторов: «Ил-2 Штурмовик», «Lock On», «MSFSX», «Ка-50 Черная Акула» и др. Соответственно был у меня джойстик Genius F-23 и решил я прикрутить его к вышеописанной проге с ползунками. Погуглил как это реализовать, нашел этот
и получилось! Управлять самолетиком с помощью полноценного джойстика, мне кажется, гораздо круче, чем маленькой палочкой на пульте. Вообщем все вместе изображено на первой фотке — это нетбук, джойстик, преобразователь на FT232, и подключенный к нему передатчик HM-T868.
Подготовка к деятельности
В этом пункте расскажем, как создать свое радио. Когда необходимые документы будут оформлены, самое время зарегистрировать средство массовой информации и приняться за разработку частоты. Для этого нужно будет написать заявление на ее предоставление. На всех этих этапах желательно консультироваться с юристом в целях принятия оптимального решения.
Перед тем как предпринимать попытки получения частоты, необходимо подготовить информацию относительно того, какой мощности передатчик будет использоваться, где его намерены расположить и где будет находиться сама радиостанция.
Рассчитывая возможные перспективы, стоит учитывать тот факт, что купить радиочастоту нельзя, так как она является государственным ресурсом. Она не продается как товар, а разыгрывается в конкурсе между претендентами. В связи с этим может случиться так, что частоту получит кто-то другой.
Если такое произойдет, не стоит отчаиваться. Иногда в конкурсе побеждает тот, кто на данный момент не планирует осуществлять собственное вещание на полученной частоте. В этом случае актуальным будет разговор о ее аренде.
Последовательность монтажа
- Общая антенна для получения и отправления сигнала — A1.
- Выключатель питания — SA1.
- Переключатель соединяющий самодельную радиостанцию с источником тока, во время отправки сигнала к передатчику и приемнику при получении — SA2.
 Количество витков:
Количество витков:
- Катушки L1 и L5 — 10 витков.
- Катушка L2 — 4 витка и находится она между половинками обмотки катушки L3, содержащей 8 витков и имеющей посередине отвод проволоки.
- Катушки L4 и L6 — 200 витков, 0.1 мм провода вокруг резистора МЛЕ-0.5 с мин. сопротивлением 1 Мом.

Ну вот, катушки для рации готовы.
Продолжаем изготовление рации своими руками:
- Размещаем детали на двух платах (одна из которых с задающим генератором, а другая — с приемником и усилителем НЧ) с одной стороны.
- Соединяем их проводом в изоляции (диаметр 0.2–0.3мм) с обратной стороны.
- Подключаем с помощью многожильного провода, изолированного хлорвинилом к батарее.
Печатный монтаж можно сделать, если есть фольгированный гетинакс, а для каркаса самодельной рации подойдут сантиметровые обрезки проволоки, вбитые в отверстия диаметром 1 мм.

Обмотки катушек и дросселей должны быть взаимно перпендикулярны, а ручка C15 находиться на передней панели радиостанции. Генератор должен быть отделен жестяным экраном от других деталей.
Пошаговая инструкция по сборке радиостанции своими руками
Шаг 1. Получив посылку, проверьте комплектность деталей корпуса и радиодеталей. Изучите маркировку. Номиналы резисторов имеют цветовую маркировку. Ключ прочтения прилагается на странице. Не перепутайте дроссель L1 с резисторами, он гораздо крупнее. Мелкие детали лучше хранить в закрытой коробочке. Изучите печатную плату со стороны деталей, чтобы понимать куда монтировать детали.

Шаг 2. Пайку начинаем с установки резисторов. Формируем электроды резистора. Припаиваем его на плату и выступающие электроды отрезаем кусачками. Так устанавливаем все элементы с длинными электродами. Место каждого элемента промаркировано на плате. Будьте внимательны — не делайте ошибок. Последовательно припаяйте все резисторы. Смотрите фото.
Шаг 3. Припаиваем удлиняющую катушку L1. Смотрите фото.
Шаг 4. Припаиваем конденсаторы. Смотрите фото.

Шаг 5. Припаиваем электролитические конденсаторы. Элементы имеют полярность установки. Правильная установка отрицательного электрода показана на фото.
Шаг 6. Припаиваем контурнyю катушку T1, переключатель S1. Металлический корпус переключателя обязательно припаиваем к плате.

Шаг 7. Припаиваем транзисторы, строго придерживаясь маркировке на плате. Положение корпуса каждого конкретного транзистора на плате показано рисунком.
Шаг 8. Из кусочков обрезанных электродов припаиваем на плату перемычку J1. Смотрите фото.

Шаг 9. Проверяем правильность и качество установки элементов. Можно промыть плату от остатков флюса спиртом. Устанавливаем пластмассовую клавишу переключения прием — передача. Крепим плату к корпусу двумя саморезами.
Шаг 10. Устанавливаем антенну. Сверху антенны устанавливаем пластмассовый колпачок. Припаиваем к лепестку антенны проводник подключения к плате. Кусочками проводников от деталей припаиваем выключатель S2. Проверяем работу выключателя питания. Рычаг переключения должен двигаться при вращении пластмассовой ручки.

Шаг 11. Облудите места припайки проводов к клеммам батарейного отсека. Установите клеммы в батарейный отсек. Припаиваем проводники подключения динамика и проводники подачи питания от батарейного отсека. Соблюдайте полярность! Можно вставить батарейку и, если вы уверены, что все собрано правильно, подать питание.

Шаг 10. Аналогично собираем вторую радиостанцию. Для правильной работы, частоты приема и передачи каждой радиостанции должны быть одинаковы. Для этого плата одной радиостанции снимается с крепежа. Из спички делается импровизированная диэлектрическая отвертка с прямым шлицем.

Повторяем эти операции на расстоянии 5 и 20 метров. Настройку лучше проводить на открытом воздухе. Не забывайте, радиостанции простые и на сигнал будут влиять непосредственно близко расположенные к антенне предметы и захват сигнала приемником может не сработать.
На этом настройку радиостанций в таком схемном решении можно закончить. Дальность связи между радиостанциями на открытой местности порядка 100 метров. Но это не предел, при соответствующей доработке или просто подключении соответствующих антенн дальность связи легко может составить несколько километров.
При интересе к теме, автор часть доработок опубликует. Станция интересна своим диапазоном и амплитудной модуляцией. Вмешательство посторонних в ваши разговоры возможно, но маловероятно. Излучаемая мощность в антенне радиостанции меньше пределов, требующих получения разрешения или регистрации.
Программная реализация
Для ATmega8 с тактовой частотой 16МГц в AtmelStudio6 все реализуется следующим образом: вначале задефайним значения счетчика для крайних положений сервомашинок:
#define LOW 16000U
#define HIGH 32000U
затем инициализируем генератор ШИМа на таймере/счетчике1:
OCR1A = HIGH; //Устанавливаем ТОР
TCCR1A = 0<<COM1A1 | 0<<COM1A0 | 1<<COM1B1 | 0<<COM1B0 | 0<<FOC1A | 0<<FOC1B | 1<<WGM11 | 1<<WGM10; //Запускаем неинвертированный Fast PWM на выходе OC1B с верхним значением счетчика, которое записанно в OCR1A
TCCR1B = 0<<ICNC1 | 0<<ICES1 | 1<<WGM13 | 1<<WGM12 | 0<<CS12 | 0<<CS11 | 1<<CS10; //предделитель 1
TIMSK = 1<<OCIE1A | 1<<OCIE1B | 0<<TOIE1; //Разрешаем прерывания по совпадению
Остается реализовать прерывания:
Пульт радиоуправления моделями своими руками

Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта. Идея ему очень понравилась, учитывая, что финансирование детских учреждений мягко сказать не очень, да и мне был интересен данный проект. Пускай я тоже внесу свою лепту в развитие радио кружка.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:

Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.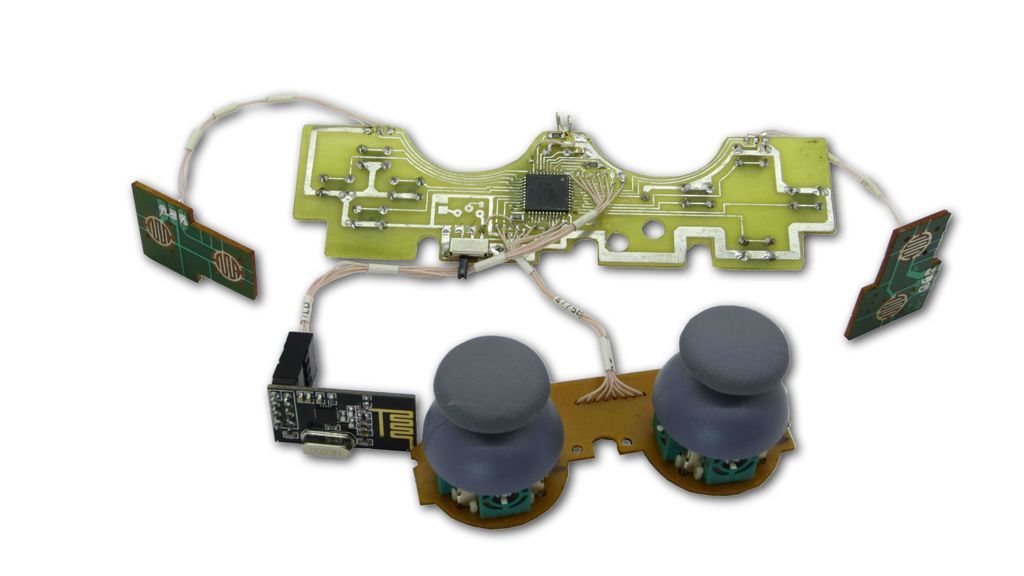
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.

Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Печатная плата — atmel-programme.clan.su/pultdzhostik.rar
Радиомодули брал тут — alipromo.com/redirect/cpa/o/rhc8f0n1hlzfodwgihmb8nwr9wx53k5g
Пуск!
Итак, есть самолетик, есть радиоуправление — Поехали!(с) Первый полет производился над асфальтом, результат — сломанный пополам фюзеляж и полувырванный двигатель. Второй полет производился над более мягкой поверхностью:
Последующие полетов 10 были тоже не особо удачными. Основной причиной я считаю сильную дискретность джойстика — по крену он выдавал только 16 значений (вместо возможных 256), с осью тангажа — не лучше. Но так как в результате испытаний самолет был значительно поврежден и не подлежит ремонту:

Рация fm диапазона своими руками в домашних условиях
Одной из наиболее популярных радиолюбительских конструкций является карманная рация. Конечно в нашу эпоху тотального распространения мобильных телефонов и пейджеров изготовление самодельных средств связи потеряло актуальность. Однако в некоторых случаях ФМ-рация может оказаться незаменимой, так как работает вне зависимости от покрытия сотовыми станциями.

Моточные данные катушек и дросселей: приёмные L1 и L2 по 8 витков ПЭВ0,6 на оправке 4 мм. Передающая — 10 витков с отводом от середины на диаметре 4мм. Дроссели — по 5–10 мкГн, они мотаются на 0,25-ваттных резисторах 100–500 Ом проводом 0,2 мм в количестве 50 витков.

Реализация в железе
Ну с теорией разобрались, пришло время все это реализовать. Мозгом системы выбран микроконтроллер ATmega8A, тактируется от кварца на 16МГц (не потому, что я захотел 16000 позиций сервомашинки, а потому, что у меня такие валялись). Управляющий сигнал для МК будет поступать через UART. В результате получилась вот такая схемка:
Спустя некоторое время появилась вот такая платка:
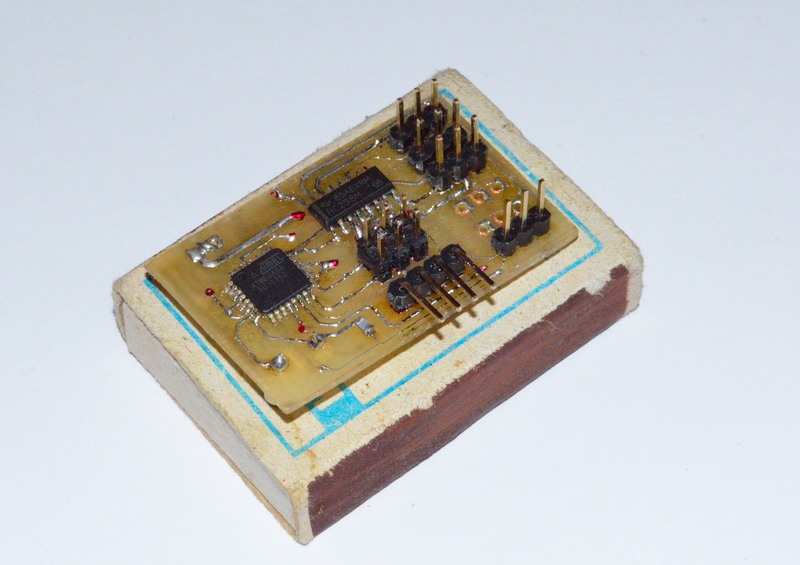
Два трехштыревых разъема я не припаял потому, что они мне не нужны, а не подряд они впаяны поскольку у меня нету металлизации отверстий, а в нижнем разъеме дорожки с двух сторон, можно было бы заменить проволочкой, но программно нету проблемы выводить сигнал на любой разъем. Также отсутствует 78L05 ибо в моем регуляторе двигателя есть встроенный стабилизатор (ВЕС).
Для получения данных к плате подключается
HM-R868:
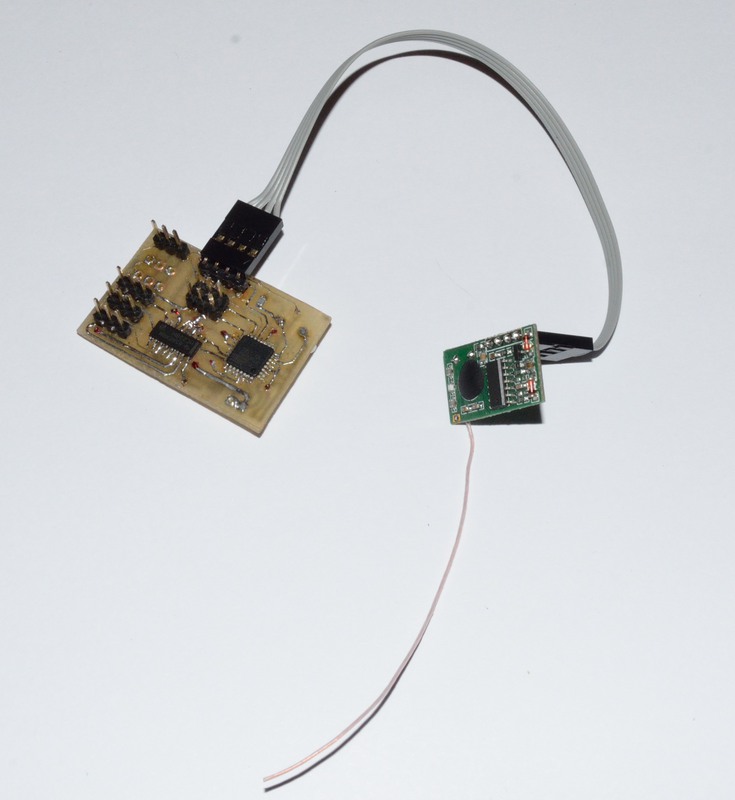
Изначально думал втыкать его прямо в плату, но эта конструкция не помещалась в самолетик, пришлось сделать через шлейф. Если изменить прошивку, то контакты разъема для программирования можно использовать для включения/отключения каких-нибудь системам (бортовые огни и т.п.)
Плата обошлась примерно в 20грн = $2.50, приемник — 30грн = $3,75.
Схема простой радиостанции
Схема рации прилагается и напечатана она в китайском стиле, как и их иероглифы. Смысл работы схемы спрятан в рисунке схемы. Автор перерисовал схему для лучшего понимания ее работы. Смотрите фото.

Радиостанция управляется двумя переключателями. Нефиксируемый переключатель S1 коммутирует режим прием-передача радиостанции (на схеме переключатель в режиме прием). Переключатель S2 подает питание на радиостанцию. Транзистор Q1 работает на прием по схеме сверхрегенеративного приемника.
ВЧ сигнал на приемник подается с антенны Ant и катушку L1 на контур С1Т1С4. Частота приема в основном определяется этим контуром. Частоту резонанса контура можно изменять подстроечным сердечником. При переключении переключателя S1 в режим передача схема приемника переходит в режим генератора ВЧ колебаний на частоте приема.
На транзисторах Q2-Q5 собран бестрансформаторный усилитель НЧ. В режиме приема НЧ сигнал приемника через цепочку R5, C10, С14 поступает на вход УНЧ и усиливается. Нагрузкой УНЧ будет динамик SP. В режиме передачи динамик подключается переключателем S1 к конденсатору С14 (он становится микрофоном)
и УНЧ усиливает сигнал с динамика. Нагрузкой УНЧ становится генератор ВЧ на который подается переменное напряжение со средней точки усилителя УНЧ через ограничивающий резистор R9. Переменное напряжение модулирует выходной ВЧ сигнал в антенну. Антенна подключена через удлиняющую катушку — дроссель L1.
Шаг 2: детали
- Высокоскоростной DC моторчик (Ebay или Amazon)
- DC моторчик с шестерёнкой (Ebay или Amazon)
- Модуль TP4056 (Ebay или Amazon)
- Литий-ионный аккумулятор (Ebay или Amazon)
- Выключатель (Ebay или Amazon)
- Пластиковые шестерёнки (Ebay или Amazon)
- Подшипник (Ebay или Amazon)
- Палочка от мороженого (Ebay или Amazon)
- Пистолет для горячего клея (Ebay или Amazon)
- Канцелярский нож (Ebay или Amazon)
В местных магазинах купите: картон, деревянные палочки, зубочистки, плату для схемы Rx Tx и провода.
Заметка: схема, которую я использовал, была добыта из старой сломанной радиоуправляемой машинки.
Шаг 4: изготавливаем самодельный рулевой механизм
- Вырежьте несколько кружков из картона и сложите их один на другой.
- Просверлите отверстие в их центрах и закрепите там зубочистку.
- Поместите круглую картонку с зубочисткой в нос основы машинки, как показано на картинке.
- Вставьте еще один кусочек картона поверх зубочистки и закрепите его суперклеем, так чтобы он мог свободно вращаться.
- Возьмите кусочек толстой стальной проволоки (как с настенного календаря) и согните её под углом 90° на расстоянии примерно 2,5 см.
- Вырежьте деревянную палочку и сделайте отверстие в её центре при помощи мини-дрели.
- Вставьте толстую проволоку в отверстие и закрепите её суперклеем.
- Вырежьте несколько кусочков из палочки от мороженого, как показано на рисунке, и сделайте в них отверстия примерно на 3/4 от центральной точки.
- Соберите части вместе и закрепите их на основе машинки, как показано на картинке.
Заметка: обязательно посмотрите видео, чтобы избежать ошибок.
Шаг 5: изготавливаем картонные колёса
- Нарисуйте на картоне три круга примерно 4 см в диаметре.
- Поместите подшипник в центр круга и обведите вокруг него круг.
- На одном из кругов нарисуйте несколько спиц.
- Вырежьте кружочки и положите один на другой, чтобы создать толстое колесо.
- Поместите подшипник на колесо и закрепите его суперклеем.
- Сделайте два колеса с подшипниками и два без подшипников.
- Прикрепите колёса к машинке F1 и закрепите их суперклеем.
Шаг 6: создаём электроуправление
- Используя плоскогубцы, закрепите оба провода как показано на картинке.
- Возьмите моторчик с шестерёнкой и прикрепите круглую картонку на его валу.
- Положите кусок толстого провода поверх картонки.
- Добавьте горячего клея и проложите проволоку между слоями картона.
- Прикрепите мотор к рулевому механизму и протестируйте его, чтобы убедиться, что он работает хорошо.
Заметка: Невозможно с помощью слов объяснить всё правильно, так что я рекомендую посмотреть видео и избежать возможных сомнений.
Шаг 7: соединяем компоненты
- Возьмите высокоскоростной мотор и закрепите маленькую пластиковую шестерёнку на его валу.
- Поместите моторчик на основе машинки и закрепите его горячим клеем, этот моторчик будет приводить в движение заднюю ось машинки.
- Поместите модуль TP4056 в заднюю часть машинки.
- Соедините выключатель с модулем зарядки.
- Достаньте схему приёмника из старой сломанной радиоуправляемой машинки, или сделайте свой по одной из схем, которые можно найти в интернете.
- Ссылаясь на приложенную выше схему, соедините вместе все компоненты.
Шаг 8: создаём элементы кузова
- Сделайте переднее крыло из картона и прикрепите его к кузову суперклеем.
- Таким же образом сделайте и прикрепите заднее крыло.
- Завершите создание кузова, вырезав и приклеив нужные картонные части.
- Для изготовления кузова, ссылайтесь на приложенные картинки.
После завершения работ над кузовом, наша самодельная машинка на пульте управления готова. Подключите 5V зарядник, чтобы полностью зарядить аккумулятор. Возьмите пульт и приготовьтесь к весёлой части инструкции: видео.





 купить по привлекательной цене 46990 руб. в Москве")