

- Когда она будет срабатывать и что произойдет
- Режим начального уровня / Beginner Mode
- Что делать с пультом ду
- Кинематографический режим / Cinematic Mode
- Перед полетом проверьте, не отключена ли система обхода препятствий.
- . Spotlight Pro
- . Фиксация курса / Course Lock
- . Режим “Точки интереса” / Points of Interest
- Режим TapFly
- Режим позиционирования / Positioning Mode
- Сохраняйте полетные маршруты и точки, где выполнялись съемки, если планируете повторять полетное задание.
- Режим Active Track
- Режим ориентации / Attitude Mode
- QuickShot
- Спортивный режим / Sport Mode
- Режим “Штатив” / Tripod
- Режим Draw
- Режим жестов / Gesture Mode
- Режим слежения за рельефом / Terrain Follow Mode
- Apm параметры:
- Dronedeploy
- Freeflight pro
- Pix4dcapture
- Syma fpv
- Ugcs for dji
- Wifi ufo
- Взлетаем и садимся
- Включение виртуального забора (fence) в mission planner
- Включение забора с помощью 7 или 8 каннала
- Возвращаемся в исходное место
- Данные с бортового журнала логов
- Делаем «восьмерку»
- Зависаем в воздухе
- Запуск квадрокоптера
- Защита от отказа наземной станции (failsafe ground control station)
- Защита отказа gps / gps failsafe
- Защита отказа аккумулятора / failsafe battery
- Защита отказа и ошибоки gps
- Интеллектуальные полетные режимы
- Как выбрать режим на дроне
- Как вызывать autotune
- Как научиться управлять дроном в 7 шагов
- Как повернуть дрон?
- Как сохранить настройки betaflight
- Летаем по кругу
- Настройка loiter
- Настройка roll/pitch
- Настройка yaw (рысканье)
- Настройка в полете
- Настройка высоты
- Настройка приемника и полетного контроллера
- Обзор
- Обзор btaflight, полетные режимы и настройки
- Поможет ли симулятор освоить управление дроном?
- Предупреждения:
- Пробуем кувырки и обходим препятствия
- Разворачиваем нос и совершаем быстрые развороты
- Расширенная конфигурация и настройки
- Стандартные режимы полета
- Тестирование корректной работы срабатывания защиты дроссельного газа
- Техническип предпосылки и рекомендации по безопасности:
- Заключение
Когда она будет срабатывать и что произойдет
Если защита включена и настроена правильно, отказ дросельного газа сработает, если :
Когда сработает защита отказа дроссельной заслонки газа произойдёт одно из следуюх событий:
- Постановку на охрану двигателей (disarm) – если вы в режиме стабилизации стабилизации или Arcro и ваш дроссельный газ установлен в ноль.
- RTL – если у вас есть фиксация спутников GPS и квадрокоптер дальше 2 метров от вашего исходного положения
- Land – если у вас нет фиксации спутников GPS или квадрокоптер находиться в педелах 2 метров от дома, когда сработали команды защиты отказа
- Продолжение с миссией – если вы находитесь в режиме AUTO и установите режим FAILSAFE на “Enabled_continue_in_auto_mode”.
- Если защита от отказа отключается (заслонка дроссельного газа подымается обратно выше 975 PWM/ШИМ) квадрокоптер останется в текущем режиме полета.
Это не означает автоматический возврат в режим полета, который был активен до срабатывания защиты отказа (failsafe).
Это означает, что если вы летите в режиме стабилизации и когда срабатывается защита отказа по газу – это приводит к тому,
что режим полета меняется на RTL или LAND и если вы ходите взять управление над квадрокоптером вам необходимо
изменить полетный режим на переключателе в другое положение , а затем обратно в режим стабилизации.
Режим начального уровня / Beginner Mode
Этот режим можно также назвать “Начинающий”, но в любом из вариантов он отражает свое главное предназначение. Доступный на всех моделях беспилотников DJI этот режим специально разработан для начинающих пилотов. То есть, если вы впервые купили летательный аппарат и только осваиваете управление им, то лучше всего приступать к полетам именно в Beginner Mode. Это убережет вас и ваш дрон от серьезных проблем и неприятных ситуаций.
В чем суть данного режима пилотирования? Во-первый, происходит автоматическое ограничение высоты и скорости полета. Во-вторых, вы не можете отказаться от использования полетных датчиков. С их помощью будет обеспечиваться безопасность и стабильность полета, а также облегчаться весь процесс управления.
Что делать с пультом ду
Дистанционка для дрона отличается от телевизорной. Владельцам игровых приставок пользоваться дистанционным пультом будет особо легко, т.к. его конструкция аналогична джойстику.
Принцип управления одинаков для всех моделей. На корпусе пульта расположено два рычага – правый и левый. С их помощью и контролируется устройство.
Как пользоваться пультом ДУ:
- Набор высоты – левый рычаг, поворот вверх
- Спуск прибора – левый рычаг, поворот вниз
- Круговое вращение – левый рычаг, боковые повороты
- Управление носом – правый рычаг, вверх-вниз
- Наклоны корпуса – правый рычаг, повороты в стороны
Кинематографический режим / Cinematic Mode
Кинематографический режим сочетает в себе лучшие возможности двух стандартных режимов пилотирования DJI: режима позиционирования (P-Mode) и режима ориентации (A-Mode). Все это сделано для того, чтобы кинооператор смог создавать плавные кадры с воздуха.
Что же там такого интересного? В кинематографическом режиме беспилотник замедляет движение более плавно и естественно за счет своей инерции, как в режиме ориентации. При замедлении движения летательного аппарата вращение также становится более плавным. Это хорошо видно на примере работы тех дронов, которые были выпущены, начиная с модели Mavic Pro.
Перед полетом проверьте, не отключена ли система обхода препятствий.
К сожалению, в некоторых интеллектуальных режимах система обхода препятствий отключена, так как оптические датчики приходится использовать для ориентации дрона во время полета. Если это так, то вам нужно будет проявлять предельное внимание тому, как и что делает летательный аппарат в ответ на ваши команды. Иначе невнимательность приведет к столкновению с препятствием и аварии.
. Spotlight Pro
Режим Spotlight Pro является гораздо более сложной и усовершенствованной версией подрежима Spotlight ActiveTrack. Эта функция, которая в настоящее время доступна только на дронах Inspire, позволяет аппарату лететь в автономном режиме, пока его камера продолжает отслеживать выбранный объект.
В Spotlight Pro вы также можете использовать подрежим Composition Mode, с помощью которого можно очертить область на экране для начала отслеживания объекта. То есть, камера начнет следить за ним только тогда, когда он пересечет предписанные границы и войдет в очерченный район.
. Фиксация курса / Course Lock
Фиксация (блокировка) курса позволяет вам обеспечить полет дрона по конкретному направлению. То есть, летательный аппарат будет ограничен в маневрах и сможет лететь только в рамках выбранного “коридора” туда и обратно. В этом случае сохраняется свобода управления подвесом и камерой, поэтому на качество съемки данная функция не повлияет.
. Режим “Точки интереса” / Points of Interest
Режим “Точки интереса” (Point of Interest – POI) во многом похож на режим круговой быстрой съемки. В его рамках дрон вынужден двигаться по кругу, а камера будет сфокусирована на выбранном объекте. Вы можете в рамках режима POI регулировать скорость, высоту и радиус полета.
Режим TapFly
Режим TapFly вошел в число классических режимов автономного полета, давно доступных на моделях DJI. Его дословный перевод “Коснись и лети” говорит о сути функционала: вы можете одним касанием на карте дисплея направить дрон в полет, используя мобильное устройство (смартфон или планшет).
Режим позиционирования / Positioning Mode
Режим позиционирования, или P-Mode, также относится к числу стандартных режимов. Его работа основана на использовании модуля GPS и оптических датчиков для стабильного парения. Как правило, у дрона есть две разновидности режима P-Mode: P-GPS и P-OPTI.
Когда беспилотник находится в режиме P-GPS, он использует данные геопозиционирования летательного аппарата, поступающие с модуля GPS. Они используются для компенсации горизонтальных смещений, вызванных ветром, и обеспечивают коптеру устойчивое горизонтальное положение в полете.
Когда дрон теряет сигнал GPS, он может перейти в режим P-OPTI. В этом случае аппарат больше не сможет сохранять свое горизонтальное положение и будет подвергаться воздействию внешних факторов. Однако, несмотря на это, работа оптических датчиков поможет квадрокоптеру (или другому типу мультикоптера) лететь, избегая препятствий.
Сохраняйте полетные маршруты и точки, где выполнялись съемки, если планируете повторять полетное задание.
Программное обеспечение дронов DJI позволяет современным пилотам создавать шаблоны и сохранять полетные маршруты, например, в таких режимах как Waypoints и Draw. Это полезно, если у вас запланировано повторение полетного задания или вы считаете, что есть вероятность повторить полет. Любителям такая функция не особо нужна, но для профессионалов ее наличие будет очень хорошим подспорьем в работе.
Режим Active Track
Это один из самых популярных и часто используемых интеллектуальных режимов полета у беспилотников DJI. Сочетая работу модуля GPS и камер, дрон способен отслеживать интересующие вас объекты, включая людей, животных или транспортные средства. Ваше наблюдение при этом необязательно.
Дрон выполняет свою работу в автоматическом режиме после поступления команды. Режим отслеживания в действительности имеет три варианта: Trace, Profile и Spotlight. В зависимости от них генерируется позиция беспилотника относительно объекта отслеживания.
Например, если вы выбрали режим Trace, то коптер будет следовать за объектом, поддерживая расстояние, установленное заранее самим пилотом. Если же вы хотите отслеживать объект спереди, то тогда лучше перейти в режим Profile. Режим Spotlight поможет при динамичной съемке. Объект будет удерживаться в фокусе, даже если вы будете маневрировать дроном в разных направлениях.
Режим ориентации / Attitude Mode
Иногда возникает ситуация, когда дрон может потерять как сигнал GPS, так и данные с оптических датчиков. Однако для таких случаев имеется бортовой барометр, с помощью которого летательный аппарат в состоянии удерживать высоту. И все же, в таком положении возникает опасность дрейфа, а сам полет в режиме ориентации становится крайне сложным. И это в полной мере касается не только новичков, но и опытных пилотов.
Сложности пилотирования в этой ситуации обусловлены необходимостью постоянно компенсировать горизонтальные сносы для удержания стабильного курса полета. Без данных геопозиционирования летательный аппарат передвигается в воздухе относительно направления своей носовой части, а это может дезориентировать пилота.
Несмотря на трудности полета в режиме ориентации, это излюбленный режим пилотирования многих кинооператоров и режиссеров. Причина этого довольно проста. Постоянная GPS-компенсация может генерировать резкие движения, которых нет в режиме ориентации что приводит к более плавным кадрам аэросъемки.
Кроме этого, отсутствия автоматического торможения, которое также отключается в режиме ориентации, помогает летательному аппарату останавливать более плавно и естественно, как только пилот отпускает управление. Для съемок это тоже очевидное преимущество.
QuickShot
Как следует из названия, QuickShot Mode разработан для быстрого и удобного создания фотографий и видеоклипов. В любом из его подрежимов выбрать объект для QuickShot очень просто, например, нажать на него на дисплее или нарисовать вокруг него рамку. Простота режима кажущаяся, так как для ваших творческих идей дрон может летать по разным курсам, а вы можете выбирать между разными схемами.
Одним из самых популярных режимов QuickShot является Dronie, где дрон летит вверх и назад, сохраняя при этом фокус на объекте. Если вы смотрели современное видео, снятое бортовой камерой беспилотника, то, возможно, уже видели в действии режим Dronie в действии.
Режим Helix делает более QuickShot еще более интересным, так как коптер в таком случае двигается вверх, вращаясь по спирали. Наконец, режим Circle Mode упрощает задачу: дрон совершает ровно один оборот вокруг предмета, на котором сфокусирована его камера.
Спортивный режим / Sport Mode
На всех дронах DJI, где вы найдете этот режим, он предназначен для предельных скоростей полета. Однако нужно помнить, что здесь скорость оборачивается отключением системы обхода препятствий. Вся ответственность за безопасное управление и отсутствие аварий возлагается на пилота.
Режим “Штатив” / Tripod
Режим «Штатив» чрезвычайно популярен среди профессиональных фотографов, увлекающихся съемкой с дрона. Он чрезвычайно удобен для съемки фото и видео с близкого расстояния. В этом режиме скорость движения дрона снижается до примерно 4-5 км/ч. Специально настроенные элементы управления помогают пилоту совершать очень точные движения и сохранять стабильное положение беспилотника. Однако эффективная работа данного режима очень сильно зависит от наличия и качества сигнала GPS.
Режим Draw
В этом режиме вы можете указать путь, по которому будет следовать дрон, просто нарисовав схему на экране вашего мобильного устройства. Скорость движения может контролироваться с помощью ползунков меню на дисплее. Движение камеры будет зависеть от того, находится ли дрон в режиме “Вперед” или “Свободно”.
Режим жестов / Gesture Mode
Режим жестов впервые появился на старших моделях Mavic. Затем он был внедрен на популярную сегодня компактную модель Spark, где функционал этого режима был расширен. И хотя этот режим сегодня можно встретить не на всех моделях DJI, тем не менее он пользуется популярностью, особенно при управлении камерой для определенных режимов и стилей съемки (Селфи).
У Spark режим управления жестами также позволяет запускать дрон с руки (PalmLauch), как только аппарат сможет распознать ваше лицо. PalmControl, еще одна эксклюзивная функция Spark, позволяющая вам управлять дроном, перемещая руку перед его датчиком.
Если вы хотите быстро сфотографировать себя в режиме жестов, вам достаточно руками изобразить рамку перед своим лицом. И наоборот, подняв руки вверх и направляя ее к дрону под углом 45 градусов, вы запускаете видеозапись.
У профессиональных дронов DJI нет такой функции, как “Режим жестов”, что вполне логично. Зато начинающие коптероводы и даже опытные операторы-любители очень любят за наличие этой функции, возможно, несколько устаревший на сегодня Spark.
Режим слежения за рельефом / Terrain Follow Mode
Режим Terrain Follow Mode доступен только в дронах DJI с оптическими сенсорами, которые обращены вниз. К ним относятся такие модели, как Phantom 4 Pro и Mavic, а также ряд промышленных и сельскохозяйственных коптеров. В этом режиме беспилотник может поддерживать постоянную разницу высот от земли даже при подъеме на гору с уклоном до 20 градусов.
Apm параметры:
- Полный список параметров
- Стандартный список параметров
Интерфейс командной строки (CLI) – для тех, кто не любит графических пользовательских интерфейсов
- CLI для радио и режим полета настройки, обзор тест
- CLI для тестирования ввода радио
- CLI для сброса содержимого EEPROM
Тестирование датчиков акселерометра и гироскопа вашего Ardupilot Mega
Dronedeploy
Откроет подборку приложение DroneDeploy, благодаря которому вы сможете легко планировать полеты своего дрона и управлять ими. Для работы нужна авторизация или регистрация нового профиля. Учитывая весь функционал, лучше всего программа подойдет именно для корпоративного использования.
С помощью DroneDeploy вы можете обрабатывать фотографии, сделанные квадрокоптером, и на их основе создавать 3D-модели для лучшего анализа. Это может пригодиться в сельском хозяйстве, при строительстве, в горнодобывающей промышленности и другой деятельности.
Особенности программы:
- Совместимость с множеством моделей современных дронов.
- Автоматизация полета: взлет, захват картинки и посадка.
- Совместная работа над общими проектами.
- Создание моделей и интерактивных карт.
- Просмотр данных в любом удобном формате.
Freeflight pro
Для владельцев летательных аппаратов французской компании Parrot также есть специальное приложение – FreeFlight PRO. В данном случае действительно чувствуется, что разработчик хорошо поработал над всеми аспектами программы. Здесь соединены преимущества уже рассмотренных нами выше утилит: разнообразный функционал и удобная навигация, подающаяся под свежим и приятным дизайном.
В галерее FreeFlight PRO можно не просто смотреть отснятые ролики, но и создавать небольшие мини-фильмы, состоящие из кусочков лучших моментов. Вы можете придавать своим роликам особый стиль и накладывать фоновую музыку – дайте волю своему воображению.
Полная версия приложения стоит почти 1200 рублей и позволяет разблокировать функцию автопилота для автоматических полетов. Благодаря этому вы сможете заранее создавать маршруты и некие шаблоны надстроек, используя которые, дрон будет летать самостоятельно.
Особенности программы:
Pix4dcapture
Программа Pix4DCapture занимает третью строчку в нашей подборке. До получения результатов и осуществления полета всего три шага: выберите дрон и подключите его, выберите план полета («Polygon», «Grid», «Double Grid», «Circular») и задайте траекторию движения квадрокоптера или активируйте ручное управление, задайте дополнительные параметры (скорость, угол камеры и пр.).
После завершения «миссии» вы можете мгновенно просматривать созданные фотографии, анализируя их в десктопной или веб-версии Pix4DCapture, где присутствуют разнообразные инструменты для двухмерного или трехмерного моделирования. Полученными результатами можно в пару кликов делиться с другими пользователями, что особенно удобно при совместной работе.
Особенности приложения:
- Профессиональные инструменты и безграничные возможности анализа.
- Легкое планирование полетов и составление карт местности.
- Простая обработка изображений в «облаке» или сервисах Pix4D.
- Приятный и интуитивно понятный интерфейс.
- Детальная настройка полета.
Syma fpv
Среди остальных приложений для управления квадрокоптерами Syma FPV отличается, пожалуй, самым простым и понятным интерфейсом. Утилита сгодится лишь для банальной записи видео или фотографирования местности при помощи дрона от китайского производителя Syma.
Для неопытных пользователей на главном экране приложения разработчик предусмотрел текстовую и видео- инструкции по использованию. Это позволит правильно подключить ваш летательный аппарат к мобильному устройству и решить все возможные проблемы на данном этапе.
Из недостатков стоит отметить очень скудный функционал, который фактически позволяет только получать картинку с камеры квадрокоптера и просматривать отснятый материал в памяти смартфона/планшета. Да и сама запись время от времени происходит с задержкой, но обычно это решается перезагрузкой приложения.
Особенности программы:
- Подробный мануал по подключению дрона.
- Минималистичный дизайн.
- Простое и быстрое соединение с квадрокоптером.
- Работает даже на старых устройствах (от Android 4.4.4 KitKat).
Ugcs for dji
Еще одно приложение, которое точно пригодится владельцам квадрокоптера – UgCS for DJI. Здесь не нужна какая-либо регистрация в системе, как это было в случае с DroneDeploy. Для работы утилиты нужно лишь предоставить необходимые разрешения (к памяти, геолокации и пр.), а также подключить смартфон/планшет к пульту DJI Remote Controller.
На главном экране вы сможете просматривать различную полезную информацию (заряд батареи дрона, статус подключения, скорость полета дрона и пройденная им дистанция, а также данные со спутников). Перед полетом вы можете выбрать один из нескольких заранее созданных маршрутов, что упрощает управление квадрокоптером.
Из явных недостатков можно отметить, разве что, отсутствие русского языка в интерфейсе. Но полноценной локализации при работе с утилитами такого рода сейчас практически и не встретишь.
Особенности программы:
- Выбирайте карту любого провайдера: Google, Geoserver или Mapbox.
- Множество настроек подключения и управления аппаратом.
- Просмотр прямого эфира во время полета (RTSP Stream/UgCS VideoServer).
- Захват фото или видео одним нажатием.
Wifi ufo
Последняя программа для управления квадрокоптером в нашей подборке – WiFi UFO. Может она и не заменит полноценный пульт управления, как это удается DroneDeploy или, например, FreeFlight PRO, но позволит в любой момент получить доступ к камере вашего дрона.
На обновленных сборках Android (начиная с 10-ой версии) могут наблюдаться проблемы при выводе картинки с камеры или вылеты. Пожалуй, это является единственным реальным недостатком утилиты.
Особенности приложения:
Взлетаем и садимся
Прежде всего, учитесь поднимать и приземлять прибор. Это звучит легко, но не у всех новичков получается выполнить действие правильно. Следите за плавностью. Не торопитесь. Движения не должны быть резкими.
Включение виртуального забора (fence) в mission planner

Забор может быть настроен следущими действиями:
- Подключите APM к Mission Planner
- Перейдите в раздел Software -> GeoFence
- Нажмите кнопку “Enable”
- Оставьте “Type”, как “Altitude и Circle”
(если вы не хотите ограничиться высотой или только кругом – в этом случае выберите “Altitude” или “Circle” - Оставьте Action как “RTL или Land”
- Установите “Max Alt” до предела высоты которую вы хотите (в метрах)
- Установите “Max Radius” до максимального растояния от дома (как правило точки старта) которую вы ходитет (в метрах).
Как правило, это не менее 50 метров
Включение забора с помощью 7 или 8 каннала
Это необязательно, но для настройки включения или отключнения забора, если вы хотите контролировать аппарат переключением выполните следующие действия:
- В ПО Mission Planner -> APM ArduCopter PIDS установите на 7 или 8 канал значение “Fence”
- Переведением переключателя на аппаратуре в высокое положение (т.е. PWM/ШИМ больше 1800) включит “забор”, а низкое положение (ниже 1800) отключит его.

Возвращаемся в исходное место
Вернуться в точку взлета – задача сложная. Поднимите устройство в воздух и отведите его в сторону. Немного полетав, спускайтесь. Постарайтесь вернуться в исходную позицию. Повторяйте действие, пока не получится.
Данные с бортового журнала логов
ATUN (обзор автонастройки) и ATDE (детали автонастройки) – это те сообщения которые записываются в журнал полетного контроллера.
Некоторые поднопбности собержания этих сообщений можн онайти на странице анализа данных журнала
Делаем «восьмерку»
Суть следующая: нарисовать квадрокоптером воображаемую цифру в небе. Это одна из самых сложных задач. Когда она будет выполнена, вращайте прибор по восьмерке безостановочно. Постепенно увеличивайте скорость. Не выходите за линию рисунка и не спускайтесь с заданной высоты.
Зависаем в воздухе
Не поднимайте квадрокоптер сильно. Для начала подойдет метровая высота. Навык отработан, когда дрон беспроблемно удерживается в воздухе на протяжении 30 секунд.
Запуск квадрокоптера
Как запустить квадрокоптер – самый распространенный вопрос новичков. Процесс сводится к выполнению трех действий.
Запуск квадрокоптера осуществляется так:
- Включите квадрокоптер;
- Активируйте пульт ДУ;
- Дождитесь сигнала.
Звуковое оповещение указывает на завершение сопряжения двух устройств. Это означает готовность аппарата к взлету.
Защита от отказа наземной станции (failsafe ground control station)
В разделе Advanced Parametr List ПО Mission Planner установите FS_GCS_ENABLE параметр для:
- 0 – для отключения защиты отказа наземной станции
- 1 – для включения и всегда режим RTL в случае потери связи
- 2 – будет тоже переход в режим RTL, но если квадрокоптер до срабатывания защиты потери связи с наземной станцией был в режиме Auto – миссия продолжается (а по окончанию миссии идет возврат домой).
Если вы использовали наземную станцию для управления квадрокоптера (т.е. с помощью джойстика),
а затем потеряли управления с земли, то по истечении 5 секунд потери связи произойдет следующее:
- Команда “постановка на охрану” (disarm) – если вы были в режиме стабилизации или Acro и ваш дроссельный газ был на нуле
- Переключение в режим RTL – если у вас есть фиксация по спутникам GPS и вы более чем на 2 метра от вашего исходного положения
- Переключение в режим Land – если у вас нет фиксации по спутникам GPS или аппарат находится в пределах 2 метров от исходного положения
- Продолжение с миссией – если вы находились в режиме AUTO и установили параметр GCS Failsafe Option = 2 (Enabled_continue_in_auto_mode).
Когда защита отказа пропадает (когда восстанавливается контакт с наземной станцией) квадрокоптер останется в текущем режиме полета.
Он не будет автоматически переключен на тот режим, который был до срабатывания защиты отказа. Это означает , что если вы летите в
режиме стабилизации и у вас срабатывает защита отказа – это приведёт к тому, что режим полета измениться на RTL или Land и
если вы хотите повторно взять под контроль квадрокоптер вы должны будете вернуть режим полета стабилизации.
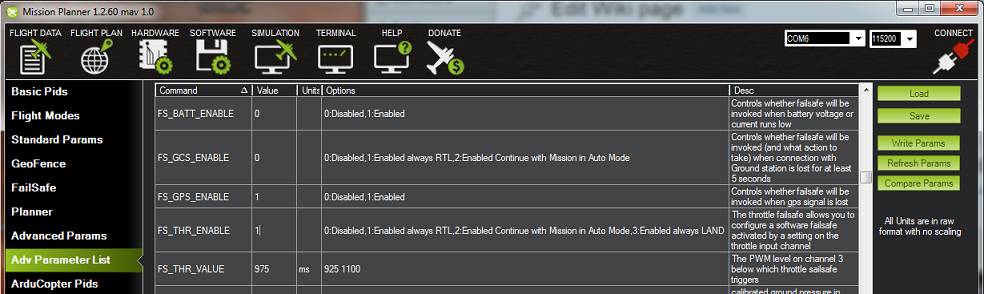
Обратите внимание: Все параметры защиты отказа можно наблюдать или установить в разделе Advanced Parametr List ПО Mission Planner
Защита отказа gps / gps failsafe
- Защита отказа GPS включена по умолчанию, но вы можете включить или отключить её на стандартный список параметров в Mission Planner
установив параметр FS_GPS_ENABLE в 0 (Disable) или 1 (Land) или 2 (перейти в режим AltHold). - Если вы потеряли фиксацию по спутникам GPS или GPS глюк в течении 5 секунд, который используется в GPS у режимов:
Auto, Guided, Loiter, RTL, Circle, Position или Drift он перейдет в режим Land (или AltHold если FS_GPS_ENABLE установлен в значение 2).

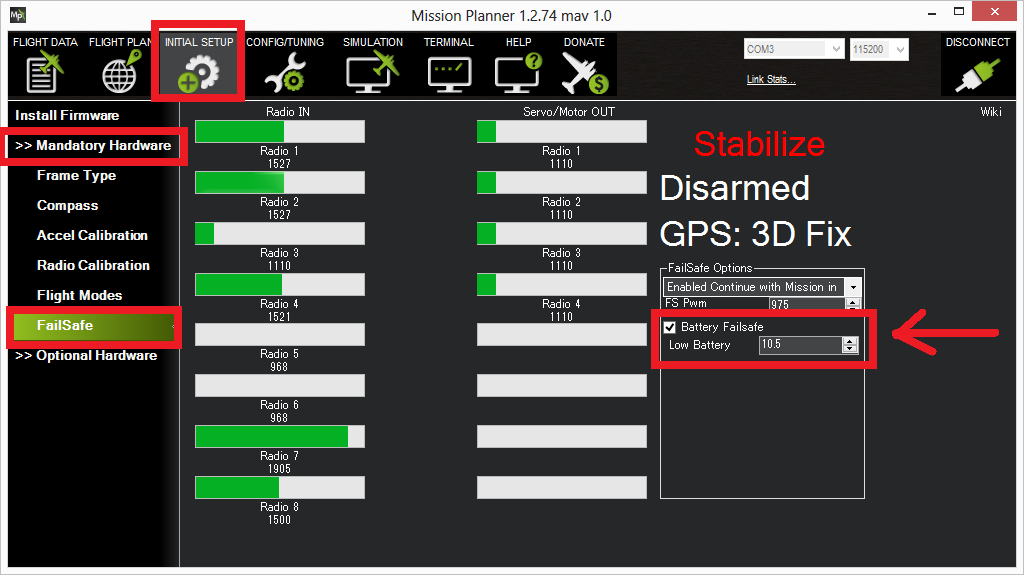
Защита отказа аккумулятора / failsafe battery
Если защита включена и правильно работает то она сработает если:
Когда защита срабатывает (failsafe) то срабатывает одно из следующих действий:
- Постановка на охрану (disarm) двигателей – если вы в режиме стабилизации или Acro и ваш дроссельный газ на нуле
- RTL – если вы находитесь в режиме AUTO и фиксацию по спутникам GPS, и не менее 2 метров от вашего исходного положения
- Посадка (Land) – во всех остальных случаях
Настройка защиты отказа батареи
Защита отказа и ошибоки gps
Как уже упоминалась на главной странице защиты отказа GPS . Защита отказа сработает, если фиксация по спутникам GPS пропадет или будут “глюки” позиции
в течении 5 секунд, пока квадрокоптер находиться в режиме, который требует GPS (RTL, Auto, Loiter, Circle, Position, Guided или Drift).
Без обновление информации от GPS инерционные датчики позволяют приблизительно 10 сенунт предоставлять точную информацию о положении,
но после этого дрейф горизонального положения становиться настолько большим, что горизонтальная позиция не может быть обеспечена.
Защита глюка GPS

Прошивка ArduCopter 3.1 и выше включает защиту от глюков GPS, которая может предупредить пилота о плохой позиции GPS и вызвать “защиту отказа” (failsafe)
и уменьшить случаи улета. Другие ошибки будут обнаружены путем сравнения каждого нового обновления местоположния полученых от GPS с положением проецируемого
из предыдущего положения обновления и скорости. Новое положение принимается как “хорошее” , если:
- Две позиции находятся в пределах GPSGLITCH_RADIUS (по умолчанию 5 метров)
- Новая позиция находиться в радиусе, который 10м/с/с (GLITCH_ACCEL) * dt * dt ; Где “dt” – разница во времени между двумя образцами
Во время сбоев на главное экране наземной станции (HUD) будет написано “Bad Glitch”
Интеллектуальные полетные режимы
Комплекс интеллектуальных режимов на разных моделях DJI может несколько отличаться по количеству доступных стилей пилотирования, но суть их одна и та же. С помощью интеллектуальных режимов ваш дрон получает возможность летать автономно, то есть работает что-то вроде системы автопилота.
Как выбрать режим на дроне
Пользуясь беспилотником, определитесь с режимом полета. Большинство квадрокоптеров оснащено тремя основными программами. В их числе:
- GPS модуль
- Стабильный полет
- Ручной полет
Самый выгодный режим для новичков – активация GPS модуля. Задавайте устройству маршрут передвижения. Дрон четко ему следует. Другими словами – это автопилот. Но навигация присутствует не у всех моделей.
В процессе съемки видео или фото используйте режим стабильного полета. Его активация вызывает к функционированию встроенный датчик – акселерометр. Его задача – удержание заданной высоты на автоматическом уровне. Ручной полет подразумевает самостоятельное управление беспилотником. Это самый интересный режим, но здесь без навыков не обойтись. Как научиться управлять дроном вручную, описано ниже.
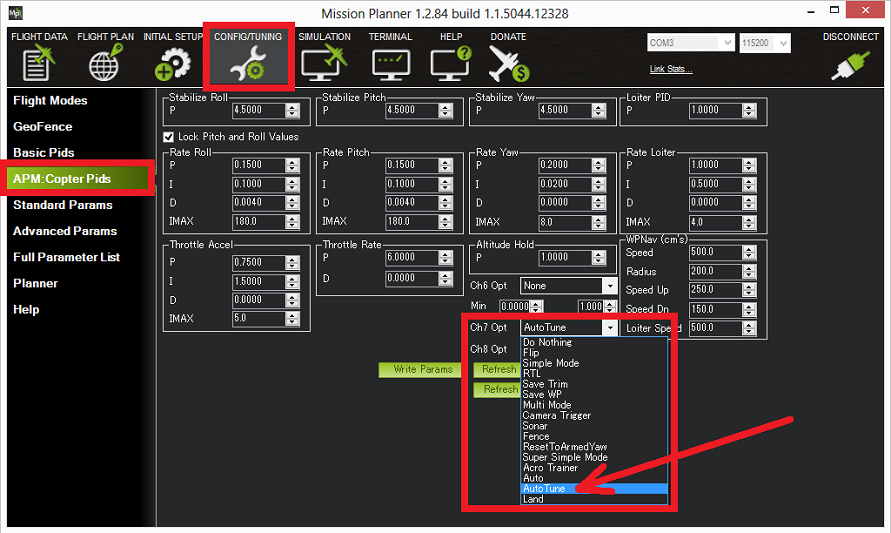
Как вызывать autotune
1. Настройке один из режимов полета на переключателе , что бы он был AltHold.
2. Установите один из допольнительных каналов (7 или 8) на функцию AutoTune в ПО Mission Planner.
Как научиться управлять дроном в 7 шагов
Управление дроном сводится к нескольким базовым движениям. Обучение включает 7 простых шагов. Начинайте процесс на открытом воздухе.
Переходите к следующему действию только после полноценной отработки предыдущего навыка. Отработав стандартные действия, осваивайте новые трюки (их даже можно придумывать самому!). Ниже представлено пошаговое руководство, как научиться управлять квадрокоптером.
Как повернуть дрон?
Не все беспилотники способны парить неподвижно. Особенно мало таких среди недорогих моделей. С ними также сложнее летать: приходится постоянно регулировать высоту рычагом. Обычно это называется полетом в «режиме ориентации».
У беспилотника обычно нет GPS, позволяющего зависнуть: в некоторых моделях взамен используется барометр или другой датчик. Но без GPS беспилотный летательный аппарат может легко отклониться от курса. GPS позволяет дрону автоматически бороться с ветром и сохранять относительно точное положение без необходимости трогать рычаги пульта дистанционного управления.
Как сохранить настройки betaflight
При использовании только одного профиля, достаточно в терминале ПО (вкладка CLI) выполнить команду:
dump
Полученные данные выделяем мышкой и копируем в текстовый файл, который сохраняем.
При использовании нескольких профилей – используется следующая последовательность команд.
profile 0dumpprofile 1dump profiledump ratesprofile 2dump profiledump ratesprofile 0
Для восстановления настроек – достаточно скопировать их из текстового файла и вставить в окно терминала.
Ну и напоследок, как установить Betaflight и какие пиды выставить для Eachine Racer 130.
Удачных полетов!
Константин, Обзор квадрокоптеров
Летаем по кругу
Нарисуйте в небе воображаемую окружность. Запустите дрон. Летайте по контуру круга, не сбавляя высоты. С линии окружности сходить также нельзя. С отработкой навыка постепенно увеличьте скорость.
Настройка loiter
Если крен и тангаж (наклоны по сторонам квадрокоптера) настроены правильно, GPS и Компас настроенны
правильно и уровень вибрации приемлемый, то настройка Loiter не требуется, но пожалйста посетите страницу полетного режима Loiter для
дополнительной информации по настройкам включая горизонтальную скорость.
Настройка roll/pitch
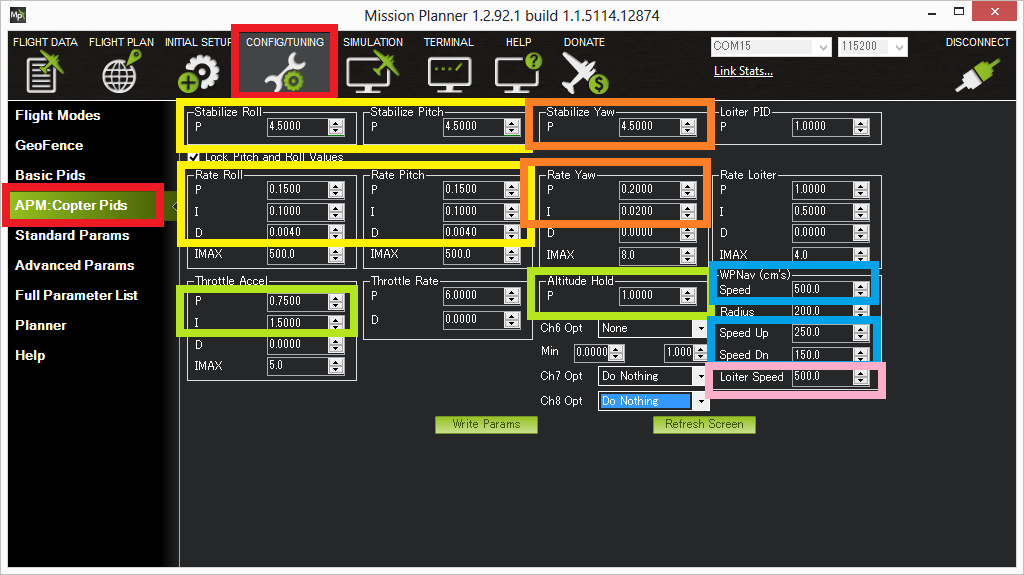
Параметры Stabilize Roll/Pitch и Rate Roll/Pitch выделеные желтым цветом на снимке управляют отзывчивостью крена и тангажа.
Параметр Rate преобразует желаемую скорость вращения в соответствии с мощностью двигателя является наиболее важным. Наибольшая
информация о настройке их находиться здесь здесь
Параметр Stabilize Roll/Pitch P преобразует нужный угол в требуемую скорость вращения, которая меняется контролем скорости.
- Чем выше это значение, тем сильнее квадрокоптер реагирует на наклоны по крену и тангажу, более низкое – сделает реагирование более гладким
- Если установлено слишком большое значение – квадрокоптер будет колебаться по осям крена и тангажа (roll / pitch)
- Если установлено слишком малое значение – квадрокотпер будет вялым на входящие команды
Более подробная информация по настройке крена и такгажа можно найти в разделе Stabilize Roll/Pitch настройки
Объективный взгляд на общий Roll и Pitch производительность можно увидеть посмотрев график из логов полетного контроллера в ATT сообщениях.
сопоставив значения на графике Roll-In vs Roll и Pitch-In vs Pitch . Оба графика должны следовать друг за другом в режиме Stabilize и в режиме AltHold.
Как альтернативу вы можете попробовать использовать автонастройку Stabilize и Rate c с помощью AutoTune
Настройка yaw (рысканье)
Параметры Stabilize Yaw и Rate Yaw выделены на скриншоте выше оранжевым цветом и отвечают за отклик рысканья (поворот носом).
Редко, когда эти параметры требуют настройки.
Подобно крену и тангажу, если параметры Stabilize Yaw P или Rate Yaw P слишком высокие – нос квадрокоптера будет колебаться, а если он
слишком низкий – квадрокоптер будет не в состоянии поддерживать направление носа.
Как уже упоминалось в разделе режима Stabilize , параметр ACTO_YAW_P отвечает
как быстро вертолет будет вращаться на основе команд рысканья пилотом. По умолчани это 4.5 – то есть скорость вращения
200 градусов в секунду, когда стик рысканья полностью утоплен влево или вправо. Большее значение сделают вращения быстрее.
Настройка в полете
Одиночный параметр может быть настроен в полете с помощью 6-го канала на аппаратуре. Для примера можно настроить
Rate Roll/Pitch P значния , найденые на странице Настройка Rate Roll/Pitch P раздела “настройка в полете”.
Пожалуйста посмотрите в ПО Mission Planner в разделе Config/Tuning -> APM Copter PIDS полный список параметров назначаемых на 6-й канал
которые могут быть настроены.
После установки значения на 6-й канал , его показания минимума и максимума должны быть в разумных пределах ( то есть не нулевой , а так же неоправданно большой),
а затем нажмите кнопку “Refresh screen” убедитесь, что путем настройки регулятора 6-го канала параметр правильно обновляется.
Настройка высоты
Параметры связанные с удержанием высоты выделены зеленым цветом на скриншоте выше.
Параметр Altitude Hold P используется для конвертирования ошибок высоты (разница между заданной и фактической высотой)
до набора или снижения желаемой высоты. Чем выше этот коэффициет тем более агресивно пытается поддерживаться эта высота,
если слишком большой коэффициет – это приводит к рывкам дросельной заслонки.
Параметр Throttle Rate (который обычно не требует настройки) преобразует коэффициент подъема или спуска до нужного ускорения вверх или вниз.
Параметры Throttle Accel PID добавляют преобразованые ошибки ускорения (то есть разница между желаемым и фактическим ускорением) на выходе у моторов.
Придерживайтесь соотношению 1 к 2 (P к I) (т.е. I в два раза выше P) , если вы меняете эти параметры.
Смотрите страницу режима удержания высоты (AltHold) для получения дополнительной информации.
Настройка приемника и полетного контроллера
Настройки приемника:
- Каждый производитель передатчиков и приемников имеют свои методы создания защиты отказа,
но не все очень дешевые бренды позволяют установить защиту на отказ. Пожалуйста , обратитесь
к руководству пользователя вашего передатчика для подробной информации о том,
как включить защиту отказа (Failsafe). Ниже приведены видео показывающее настройку:
Обзор
По умолчанию PID усиления предназначены для квадрокоптеров 3DR , хотя они работают на самых разных рамах.
Тем не менее, что бы получить оптимальную производительность может потребоваться их настройка , которая
может быть сделана через Mission Planner ->
Наиболее важным параметрами являются правые – Rate Roll P (и по умолчанию Rate Pitch P заблокирован с тем же значением).
как обсуждалось здесь
Обычно лучше всего начинать с настройки коэффициента Roll/Pitch P в режиме стабилизиции, затем перейти на настройки
удержания высоты в режиме AltHold , затем Loiter (который часто не нуждается в настройке) и последнее –
настройки производительности полета по навигационным точкам в режиме Auto.
Примечание:Руководство полезной информации с прошивкой ArduCopter версии 2.8.1
настройки этих параметров после версии 2.8.1 очень сильно изменились.
Обзор btaflight, полетные режимы и настройки
Посмотрите видео Betaflight Прошивка и Настройка Квадрокоптера.
В Betaflight много настроек и полетных режимов, как их настраивать вы можете посмотреть в видео ниже.
Заливка Betaflight в Omnibus, настройка и калибровка датчиков.
Настройка полетных режимов в Betaflight.
Видео выше во многом пересекаются, но я включил сюда все те, которыми пользовался для настройки.
Внимание! Betaflight обновляется автоматически! После обновления требует новую прошивку. При этом ваши данные могут слететь, так что не зебываем сохранять их!
Поможет ли симулятор освоить управление дроном?
У некоторых беспилотных летательных аппаратов есть передатчик с портом «тренер». Он позволяет подключить пульт к ноутбуку либо десктопу, установить специальное приложение и управлять виртуальным дроном с настоящего пульта, чтобы вначале прочувствовать нюансы управления, и только потом отправить аппарат в настоящий полет.
Симуляторы позволяют освоить не только описанные выше основы полетов, но и сложные маневры: повороты и даже полеты по кругу. В реальных условиях их не так-то просто выполнять, даже на квадрокоптере с поддержкой GPS. Существуют программы-симуляторы, наподобие RealFlight, поставляемые в комплекте с контроллером. На них можно «полетать», прежде чем покупать настоящий беспилотник.
Предупреждения:
- Минимальный рекомендуемый радиус забора 30 метров.
- Для достижения наилучших результатов убедитесь, что RTL работает на вашем квадрокоптера.
- При включенном “заборе” предполетная проверка (pre-arm check) проверяет фиксацию по спутником GPS квадрокоптера, перед снятием с охраны (arming).
- Если у GPS отключена защита отказа (failsafe disable) и включен забор и вы теряете фиксацию по спутникам (3d fix) во время полета – забор будет отключен.
- Если у GPS включена защита отказа (failsafe enable) и включен забор (GeoFence enabled) и вы потеряли фиксацию по спутникам GPS во время полета –
квадрокоптер переключиться в режим посадки (LAND) потому , что мы больше не знаем позицию аппарата и мы хотим быть уверены, что
квадрокоптер никогда не путешествует далеко за пределами забора. Это поведение произойдёт независимот от режима полета. Если команда посадки (Land)
не требуется – пилот может вернуть контроль перемещая переключатель режимов полета. - Резервные заборы создаются в 20 метрах от предыдущего нарушенного забора исходя из положения квадрокоптера.
Это означает, что если вы решите переопределить забор у вас будет не больше 20 метров, что бы
восстановить контроль над квадрокоптером, прежде чем он переключится в режим RTL или Land снова. Если вы
действительно хотите переопределить забор вы должны быть готовы, что бы переключить режим полета дважды или же
настроить включение и выключение забора.
Пробуем кувырки и обходим препятствия
Для кувырков нужно использовать специальную кнопку на пульте дистанционного управления. Опробовав их, переходите к преодолению препятствий. Сделайте их самостоятельно. Используйте табуреты, обручи, стол и др. По выполнению этого пункта, управление квадрокоптером станет привычным делом.
Разворачиваем нос и совершаем быстрые развороты
Найдите у квадрокоптера переднюю часть. Поднимите аппарат в воздух и разверните его на 180°, затем вернитесь в исходное положение. Совершите аналогичные действия в другую сторону. Следите за положением прибора. Навык отработан, когда дрон свободно поворачивается, застыв на одном месте. То же касается и быстрых разворотов.
Расширенная конфигурация и настройки
Эти разделы дадут вам информацию более продвинутых настройках и оптимизации Ardpupilot конфигурации ArduCopter
Установка компаса (расширенная) – объяснения всех процедур настройки.
FailSafes – защита от потери:
Fence – защита от улетов
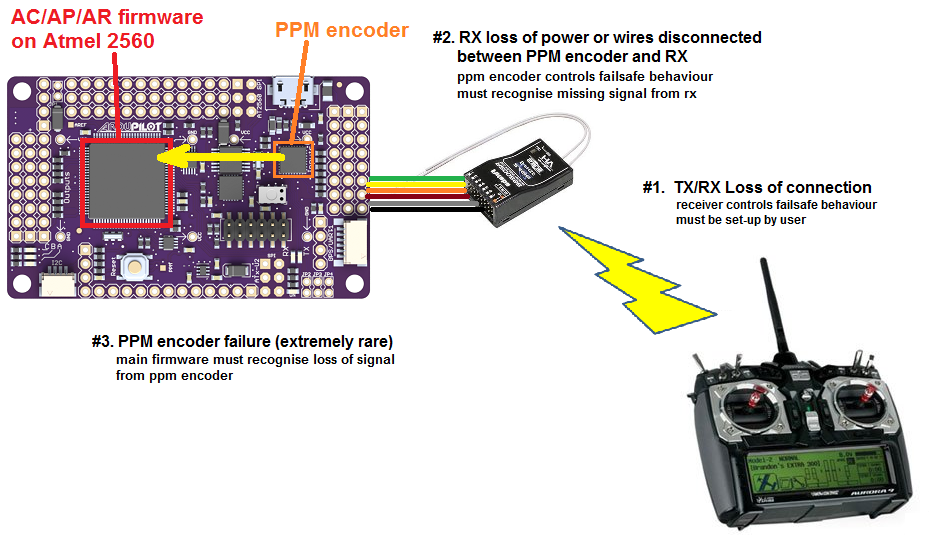
Информация по PPM энкодеру
- Общая информация о PPM энкодеру
- Обновление прошивки PPM энкодера вашего APM – если вы купили свой APM до марта 2023
- Обновление прошивки PPM энкодера вашего APM часть вторая – та же информация, что и выше
- Использование автономного PPM энкодер
Функции 7 и 8 каналов – функции , которые могут быть использованы переключателями 7 и 8 каналов аппаратуры.
Тюнинг – главное руководство по настройке для ArduPilot конфигурации ArduCopter
Стандартные режимы полета
Начнем именно с них, и вы сразу поймете, почему. Дело в том, что стандартные режимы полета не предназначены для ведения съемки с воздуха. Эти виды управления коптером помогают пилоту выбирать ту манеру пилотирования, которая соответствует его знаниям и опыту.
Тестирование корректной работы срабатывания защиты дроссельного газа
Вы можете проверить срабатывание защиты отказа выполнив следующие тесты с APM. Подключите Mission Planner
c сопощью USB кабеля или телеметрической связью. Вы можете провести испытания без LiPo батареи,
но если вы её подключите – следует сначала удалить пропеллеры.
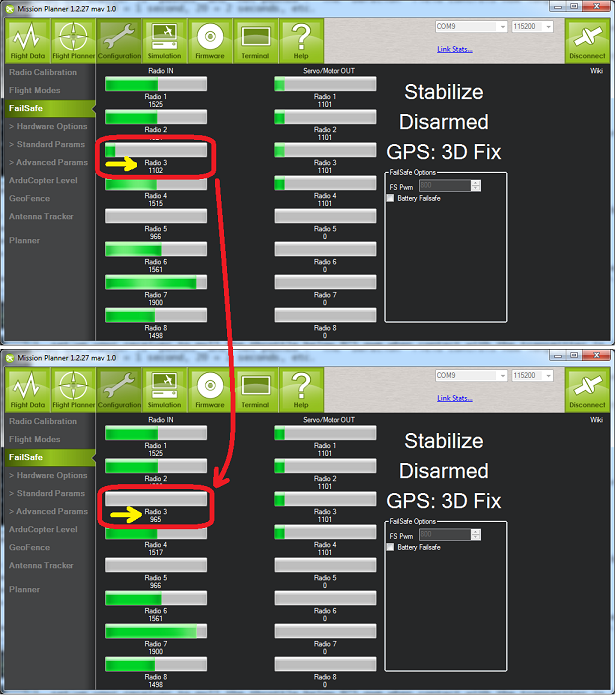
Тест № 1: поможем сделать падение канала газа при потери радиосвязи
Убедитесь, что ваш радиопередатчик аппаратуры включен и подключен с газом на нуле в режиме полета стабилизации
Значение PWM дроссельной заслонки (3 канала) должно быть примерно как в первом рисунке ниже.
Это значение может быть выше или ниже, но это определенно должно быть не менее 10 PWM выше, чем значение в области PWM FS
Выключите передатчик и показание значении дросельной заслонки PWM должна снизиться ниже по крайней мере ниже на 10 PWM чем значение PWM FS, как во втором рисунке ниже
Тест № 2: обеспечение постановки на охрану двигателей (disarm) в режиме стабилизации или Acro с дросселем газа в нуле
Переключитесь в режим стабилизации , снимите с охраны свои двигатели (arming) но сохраняйте уровень газа на нуле.
Выключите передатчик. Двигатели должны немедленно встать на охрану (disarm) (красный светодиод на плате полетного контроллера начнет мигать,
постановка на охрану будет отображаться на экране ПО Mission Planner)
Тест № 3: обеспечение изменения полетного режима до RTL или Land, когда дроссель ниже нуля
Переключитесь в режим стабилизации , вооружите свои двигатели и поднимите дроссельный газ до середины. Выключите передатчик.
Полетный режим должен перейти на RTL, если у вас есть фиксация по спутникам или режим Land , если вы не имеете фиксацию по спутникам GPS.
(режим полета и состоянии фиксации спутников можно увидеть в экране ПО Missio Planner)
Тест № 4: взять контроль после срабатывания защиты отказа газа
продолжение следует…
Техническип предпосылки и рекомендации по безопасности:
Система навигации GPS не предназначена в качестве основной системы навигации и сигналов отсева или неточных позиций (так называемые “глюки”)
происходят время от времени, даже при ясном небе.
Особенно важно избежать полеты внутри помещений, между зданий, горами или во дворах из-за отражения GPS сигнала которые приводят к большим ошибкам GPS.
Для избежания ошибок позиционирования летайте под чистым небом.
Для получения хороших результатов и безопасности рекомендуется , что бы вы проверили качество сигнала GPS и бюллетеней для вашего региона перед вылетом.
Проверьте эти разделы для конкретной информации GPS:
Заключение
Аэрофото- и видеосъемка с борта беспилотника – это одно из самых увлекательных и интересных занятий, которым может заниматься человек любого возраста. Для большинства, и это понятно, это главная причина покупки летательного аппарата. Сегодня благодаря совершенствованию системы интеллектуальных режимов пилотирования в продуктах DJI зачастую для съемки даже уникальных материалов не всегда требуется высокий уровень навыков в пилотировании.

 (LiPo) - 94182PRO")





