

Виды поломок у квадрокоптеров линейки dji
Как мы все знаем, компания DJI делает качественные дроны в хорошем исполнении. Казалось бы от такого качества ремонта можно избежать на 100%. Но нет. Это вещь, и как любой другой вещи нужен уход. Собственно, квадрокоптеру тоже нужен уход. Основные поломки, которые у них могут встречаться — это:
- программные сбои и выход из строя;
- краши и падения дрона;
- следствия долгой эксплуатации;
- следствия износа;
- стики, на пульте управления не расположены по центру, а отклоняются;
- при получении SSID выдается ошибка;
- поломка камеры и других компонентов после падения;
- GPS навигация не срабатывает;
- падение дрона в воду;
- батарея не держит заряд и быстро садится;
- материнская плата повреждена, или ее отдельные компоненты;
- треснул или повредился пропеллер;
Если у вас есть поломка из списка выше, мой вам совет — делайте ремонт в сервисном центре или у частных мастеров. Не стоит этим заниматься самостоятельно, если вы в этом не разбираетесь.

В вашем городе наверняка есть такие люди, которые за небольшую плату произведут ремонт квадрокоптера DJI и у них наверняка есть необходимые детали и запчасти.
Не включается (не взлетает, не работает) квадрокоптер: ищем и устраняем причины
Неполадка |
|
|
Квадрокоптер не связывается с передатчиком | Стик газа стоит в неправильном положении | Зафиксируйте газ до упора на себя и не двигайте стик до тех пор, пока дрон не свяжется с аппаратурой |
Потух индикатор на пульте дистанционного управления | Батарейки разрядились | Заменить элементы питания |
Посторонние шумы при полете дрона, лишняя вибрация | Поврежден корпус и/или пропеллеры квадрокоптера | Определите дефект «на глаз», осторожно выровняйте поврежденный пропеллер или замените его |
Электродвигатели работают, но беспилотник не взлетает | Неправильно установлены винты | Проверьте маркировку каждого пропеллера и установите винты согласно схеме в руководстве пользователя |
Отказал мотор | Нарушены контакты или сгорел двигатель | Проверьте провода и контакты, идущие к двигателю и полетному контроллеру; если визуально все хорошо, то возможны проблемы с двигателем или контроллером. Нужна помощь мастера |
Квадрокоптер резко реагирует на команды пульта ДУ | Возможно, выбран режим «эксперт» | Начинать полеты рекомендовано с режима для новичков; выберите режим пилотирования согласно вашим навыкам |
Квадрокоптер не выполняет сложные фигуры | 1.Неправильно выбран режим полета 2.Аккумулятор дрона на низком уровне | 1.Убедитесь, что выбран режим «эксперт» 2.Проверьте уровень заряда АКБ, может дрону просто «не хватает силы» |
Коптер постоянно «несет» в одну из сторон | Неправильная калибровка | Установите дрон на ровной поверхности, сделайте подкладку тонкого картона под тот луч, в сторону которого коптер отклоняется в полете. Проведите калибровку. Проблема должна исчезнуть |
Нестабильный полет | 1. Проблемы с калибровкой 2.Низкий заряд АКБ | 1.Установите дрон на максимально ровную поверхность и проведите калибровку повторно. При необходимости проведите дополнительное триммирование 2.Зарядите аккумулятор полностью |
Если наши советы вам помогли, рады были вам помочь. Если неполадки остались – обращайтесь к нашим специалистам.
RC-Hobby предлагает ремонт радиоуправляемых моделей любой степени сложности, а консультации по телефону мы даем абсолютно бесплатно.
Несложный ремонт квадрокоптера (с микроскопом)
Недавно один мой хороший друг попросил меня «посмотреть» квадрокоптер
WLtoys v272
, который в результате неудачного пируэта приложился одним из лучей, после чего перестала полностью работать индикация этого луча и мотор стал работать с явными перебоями. При этом, если приложить небольшое усилие «на изгиб» — где-то что-то восстанавливалось и двигатель начинал работать в нормальном режиме.
Согласился «не глядя». И был очень впечатлен размерами «пациента»:

Надо разбираться, что не в порядке у этого крохотного ЛА.
Уронили мишку на пол,
Оторвали мишке лапу.
Все равно его не брошу –
Потому что он хороший.
Визуальный осмотр невооруженным глазом ничего не показал (ожидаемо). Но
dadget.ru
очень своевременно предоставил на тест “
портативный микроскоп
“.


И тут дело пошло гораздо веселее (и интереснее, поскольку никогда до этого не пользовался микроскопом для своих проектов в микроэлектронике).
Все последующие фото сняты микроскопом, никаким обработкам не подвергались (только масштабирование). Каждая фото — ссылка на полноразмерный оригинал изображения.
Одна из первых фотографий «материнской платы» квадрокоптера (для оценки возможностей микроскопа):

Сразу расскажу, что этот квадрокоптер построен по довольно оригинальной схеме: вся механическая часть («крестовина») совмещена с электронной частью («печатная плата»). Собственно, весь «скелет» квадрокоптера является печатной платой (ну или наоборот: печатная плата является «крестовиной»).
С одной стороны — это очень удобно: никаких лишних механических частей, но с другой — если вдруг проблемы с печатной платой (например, отломился один из «лучей») — квадрокоптер можно выбросить, поскольку нормально печатную плату восстановить скорее всего не удастся.
Но кто знает, вдруг, конкретно в этом случае повезло и удастся починить?
Начал пристально рассматривать «проблемный» луч и сразу обнаружил отсутствие одного из светодиодов (типоразмер 0603) — он просто отсутствовал, видимо, его просто целиком оторвало при ударе:

Так же вызывал сомнения (и не беспочвенно) светодиод в вершине «луча»:
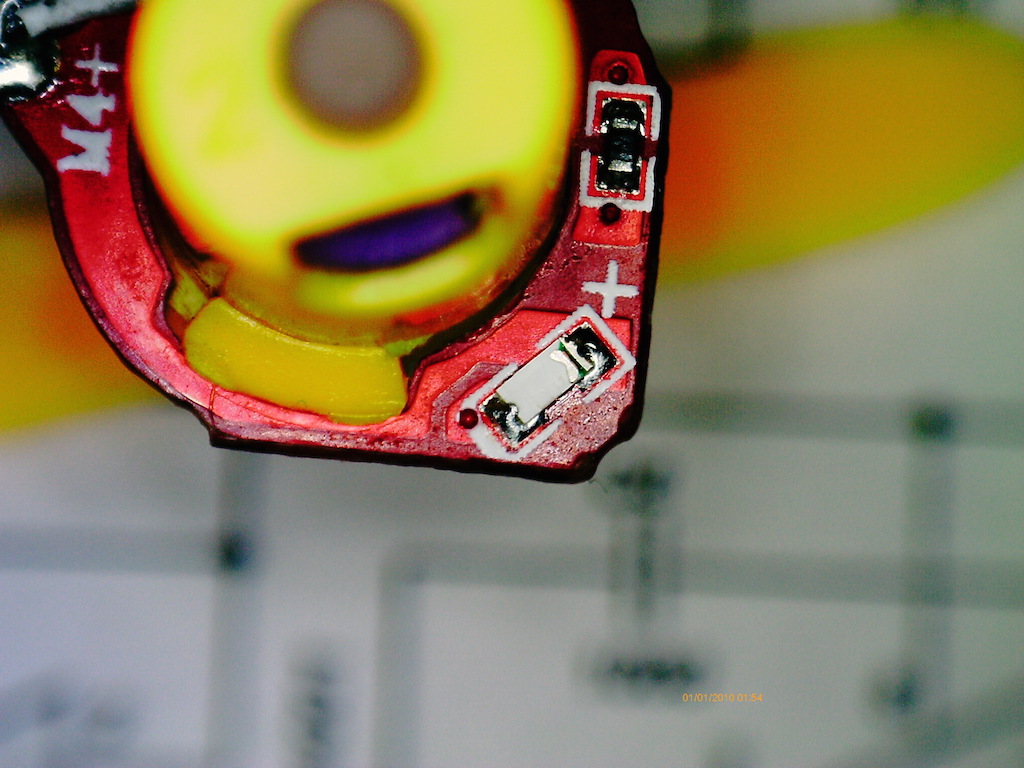
На фото видно, что от светодиода осталась только подложка. Сам кристалл и линза — отсутствуют.
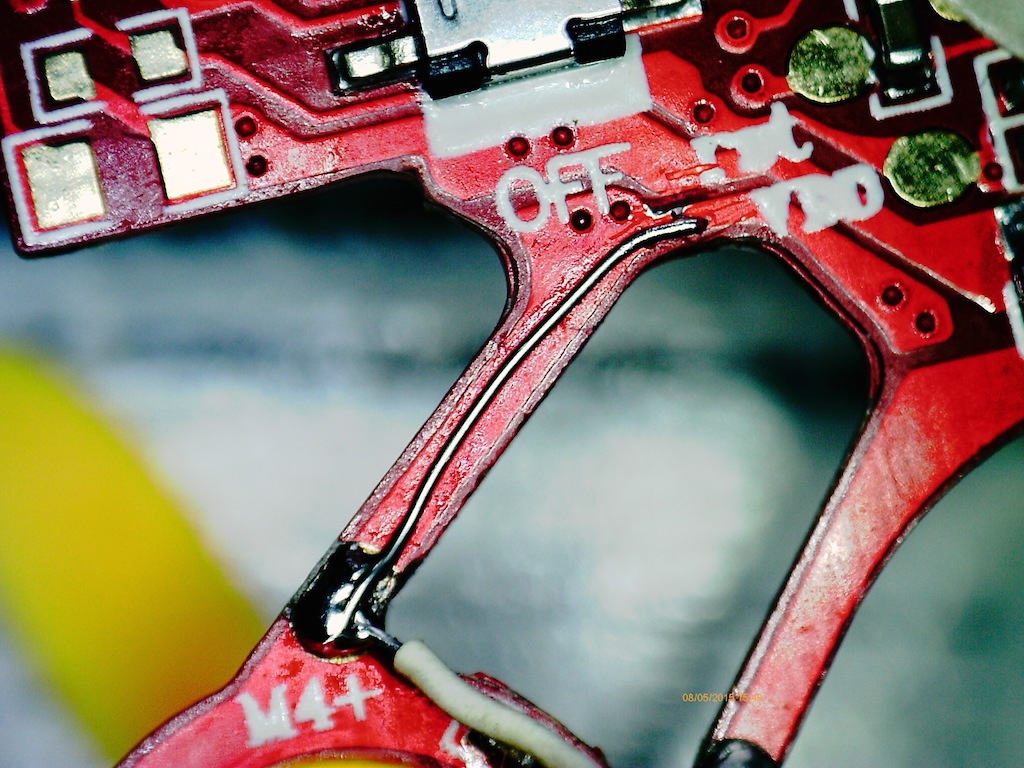
Со светодиодами разобрались, но ведь не это является главной проблемой. Нужно найти место микротрещины на луче в цепи питания соответствующего двигателя.
И опять микроскоп помог. Практически сразу вот это место вызывало сомнения:

После того как основная неисправность была локализована, ремонт стал уже «делом техники»: аккуратно убрал острым ножом часть паяльной маски, залудил «обнаженное» место и припаял тонкий проводок.
Светодиоды запаял на их законное место. Повезло, что пострадали именно красные «светики» и они были у меня в наличии (среди «сигнальных огней» еще есть синие — вот таких у меня не было и пришлось бы нарушить замысел производителя или отказаться от индикации на этом луче совсем).
Восстановленные светодиоды фотографировать не стал (никакой новой информации, просто проконтролировал качество их пайки).
После этих действий квадрокоптер «вернулся в строй» (функциональность полностью восстановилась). Видео с полетом «мухи» не будет — слишком резвая, телефоном за ней уследить практически не реально (и я пока не очень освоился с управлением для «медленных» перемещений, пригодных для съемки). Полет можно посмотреть, например, в этом видео.
Теперь замечания по поводу нового инструмента — портативного микроскопа:
- В целом, прибор понравился — просто, удобно, наглядно, доступно.
- Встроенный цветной экран позволяет оперативно рассмотреть мелкие детали, но экран все-таки мелковат и его удобно использовать в качестве грубого «видоискателя».
- При подключении к компьютеру (с соответствующим софтом, включен в комплект поставки) — есть возможность просматривать изображения непосредственно на экране компьютера (и тут уже размер отображаемого изображения ограничен только размерами монитора).
- Можно подключить практически к любому ТВ (через «тюльпаны») и использовать экран ТВ для просмотра.
- Встроенная в микроскоп система подсветки (8 белых матовых светодиодов и кольцеобразный рассеиватель) — хорошо справляются со своей задачей и существенно облегчают работу.
- «С рук» микроскопом пользоваться практически невозможно (очень малая глубина резкости, что ожидаемо), но увесистый металлический штатив в комплекте решает эту проблему.
- Можно получать как оригинальные изображения (цветные), так и черно-белые (два варианта: позитивное и негативное изображение — в некоторых случаях удобно пользоваться именно этими режимами, особенно когда надо прочитать маркировку микросхем, выполненную лазерной гравировкой).
- Есть возможность делать «таймлапс» (автоматическая серия фотографий через заданные промежутки времени) и снимать видео (фото и видео сохраняются на microSD карту (в комплект поставки не входит).
- Встроенный экран не блещет характеристиками (плохие углы обзора, «кислотные» цвета и на второй день использования появился «битый» пиксел).
- В описании заявлена поддержка русского языка, но в меню микроскопа его не нашлось (видимо, старая прошивка, но новую тоже найти не удалось). Мне не критично, но как есть.
- Богатый комплект поставки: микроскоп, зарядник, аккумуляторная батарея, чехол, A/V-кабель, USB-кабель, штатив, диск с ПО, салфетка из микрофибры.

Задачи, которые лично мне стало удобнее и проще делать с микроскопом:
Безопасных полетов вам. Берегите свои «игрушки».
Ремонт квадрокоптера своими руками
Подробно: ремонт квадрокоптера своими руками от настоящего мастера для сайта radiocopter.ru.
В этой статье мы рассмотрим ремонт квадрокоптера своими руками после падения.
Если у вас проблемы не с рамой, а с попытками взлететь, то смотрите статью Что делать, если квадрокоптер не взлетает.
Итак, на сегодняшний день квадрокоптеры имеют два типа рам – закрытый корпус и открытая рама с лучами на которых крепятся моторы.
Для начала займемся открытой рамой, все же квадрокоптеры типа Drone Racing чаще попадают в аварию.
Подопытным у нас будет Eachine Racer 250, прошлым летом я случайно переключил режим полета и не заметил этого, мне показалось – что квадрик сходит с ума и летит сам по себе 🙂
Это были мои первые полеты без GPS и я летал только в Agle и совсем не ожидал перехода в Acro, я в нем сроду не летал, вот и запаниковал 🙂
Последствия падения квадрокоптера – сломанный луч рамы, даже пропеллер не пострадал.
Места слома рамы были слегда зачищены наждачной бумагой и обезжирены ацетоном.
В качестве клея использовалась 30 минутная эпоксидная смола. Ее очень удобно хранить в шприцах – легко дозировать и габариты не большие.
Эпоксидка наносится на места слома – на обе стороны луча.
Затем соединяется и фиксируется с помощью клеевого пистолета (если не знаете что это такое – смотрите на видео ниже). Термоклей просто удерживает луч до того момента, пока эпоксидка схватится. Очень удобная вещь для временной фиксации любых деталей.
Затем я добавил эпоксидки на внутренние части слома луча и подождав, пока эпоксидка потеряет текучесть, оставил сломанный дрон до утра.
За ночь эпоксидная смола набрала прочность и можно было отправляться в полет.
Вот видео полета с восстановленным лучом.
На всякий случай я заказал запасной луч, а до его прихода летал на востановленном. Никаких проблем с полетами у меня не возникало.
С ним забавно вышло, дал полетать на полете знакомому знакомого, квадрик то устойчивый, все режимы только через GPS обрабатываются, так что не переживал, у меня на нем дети от 5 лет летают самостоятельно.
Через некоторое время меня отвлекли разговором, я перестал следить за квадриком, а знакомый знакомого поднял его метров на 30 не смотря на мигание огней и явное желание квадрокоптера приземлится (сбрасывает обороты двигателей самостоятельно), в общем, свалился квадрокоптер по отсечке.
Знакомый знакомого принес упавший квадрик, положил пульт и слинял по тихой грусти. Больше я его не видел 🙂
Восстановление корпуса квадрокоптера V303 я заснял на видео.
Фактическое отличие есть только в наложении бандажа – пропитанной эпоксидной смолой ткани на места поломки, сделано на обеих частях корпуса.
Это добавило прочности и теперь, если и будет поломка, то она точно будет в другом месте, но по месту предыдущего слома.
Вот вобщем то и все о починке квадрокоптеров своими руками. Если у вас появились вопросы – задавайте их в комментариях к статье.
Так же подписывайтесь на Ютуб канал RC-Aviation , на канале видео выкладываются раньше, чем по ним делается статья.
На днях решил восстановить Phantom 3 Advanced после крушения. При внешнем осмотре были обнаружены не самые страшные повреждения — это разбитая часть подвеса, пара шлейфов, аккумулятор и заклинивший движок. Заказал з/ч(кроме аккумулятора и части подвеса — на неисправной части подвеса немного выкрошен магнит статора, по идее должен быть рабочим) на AliExpress, дабы проверить функциональность коптера. Но, при вскрытии оказалось что повреждена еще и часть схемы(фото приложить не получается, повреждена черная коробочка посередине микросхемы). Карсет аккумулятора разбит, но его индикаторы работают исправно, поэтому решил проверить работоспособность коптера после замены шлейфов и движка. Вставил аккумулятор в коптер — реакции никакой..
Подскажите, в чем может быть проблема? Стоит ли заказывать аккумулятор, подвес? Если стоит, то где надёжнее и дешевле это сделать? И что это за «коробочка» на микросхеме, можно ли ее заказать отдельно? Либо же мои старания напрасны.
Каждый пилот квадрокоптеров сталкивался с крашами, краш (crash) с английского означает авария. Краши характерны для гоночных дронов, так как весь смысл владения таким аппаратом – гонять, облетать препятствия и делать трюки. Дроны для съемок падают редко и в основном из-за ошибки пилотирования, например, человек не увидел ветки или здание. На гоночных же, полет между веток и препятствий является целенаправленным.
Совет для новичков – учитесь летать в поле, там вы скорее всего не разобьете свой дрон, а падать вы точно будете.
Итак, в этой статье я расскажу и покажу, как ремонтировать двигатель после краша. Это единственный ремонт (еще можно поменять подшипники), который можно сделать без специального оборудования.
При крашах могут отлететь магниты, которые находятся в куполе. Они никуда не отлетят, но сместятся и начнут задевать нижнюю часть мотора или что еще хуже, могут заклинить.
После каждого краша осматривайте двигатели и если вы заметили, что начали торчать магниты, то не летайте, а меняйте двигатель на новый, а этот на ремонт. Характерным симптомом того, что магниты не на своем месте, будет скрипящий звук при работе.
Вводная часть закончена, теперь приступим к самому ремонту:

- пинцет
- ватные палочки
- клей на основе цианоакрилата, дешевый не берите, иначе отвалится
- ацетон
- мотор
Двигатели могут быть разных корпусов и у них могут быть по разному сделаны пазы с подшипником, валом и стопорным кольцом. У меня два вида движков:


Как видите, они также отличаются и люфтом между нижней частью и верхней. У меня сломался тот мотор, который с левой стороны, т.е. с внутренним пазом.
Первым делом нам нужно снять стопорное кольцо. На правом это сделать значительно проще, а вот на левом это было сделать трудно, в итоге даже отломился кусочек ушка у кольца с левого мотора, который с пазом:
После того, как вы сняли кольцо, не потеряйте его. Далее нужно располовинить (раздвинуть) две половины мотора. Тянуть в стороны нужно руками, будет вот так:
А вот и наша проблема, магниты, которые отклеились и задевали нижнюю часть мотора:
Если внимательно посмотрите, то станет понятно, что они находятся не на ровной линии — кто ниже, кто выше.
Не нужно снимать все магниты, так как они расположены поочередно — плюс/минус/плюс/минус и чтобы понять, где у магнита плюс, а где минус, вы потратите много времени:
Поэтому делаем так:
Берете пинцет и пробуете оторвать какой-нибудь магнит, если отрывается, аккуратно его снимаем и ложим той стороной, которой он был приклеен — на стол:
Далее берем ватную палочку, смачиваем в ацетоне и чистимпаз в котором был магнит от грязи. Вытираем сухой и чистой стороной. Грязи будет будет много, это видно по фотке выше. Также берем магнит, не забывая какой стороной он лежит на столе и протираем ацетоном посадочную сторону.
Берем зубочистку, капаем на нее клей и аккуратно, тонким слоем смазываем площадку в куполе, т.е. паз, с которого сняли магнит. Только не лейте туда литр клея, мотор будет очень быстро крутиться, а этот клей создаст лишний вес в этой точке, мотор начнет вибрировать и быстрее изнашиваться.
Берем магнит и быстро ставим его на место, сильно прижимая.
Вот так делаем с каждым отвалившимся магнитом.
После проклейки мотора, смазываем маслом (не подсолнечным, а машинным, а лучше оружейным) ротор и подшипники. После этого ставим стопорное кольцо на место. Это то еще занятие по установке кольца в такой паз, мало того, что нормально не залезешь туда, так оно еще и крутится на роторе
Все, попробуйте покрутить его, если все верно сделали, нигде ничего задевать не будет и его можно ставить на дрон.
Вот так вот вы смогли сделать ремонт бесколлекторного двигателя своими руками, ничего сложно нет в том, чтобы приклеить отлетевшие магниты моторы квадрокоптера.
Ремонт моделей квадрокоптера DJI – один из частых вопросов при покупке дронов этой марки. Где купить запчасти, сколько они стоят и как произвести ремонт самому – все эти вопросы остаются не закрытыми. Но в этом выпуске я постараюсь дать развернутую информацию, и постараюсь ответить на эти вопросы.

Много компаний представленных в рунете, которые занимаются ремонтом дронов предлагают свои услуги, но есть пользователи, которые задаются вопросом как отремонтировать квадрокоптер DJI самому. Казалось бы это может сэкономить деньги, ведь в ремонте квадрокоптера нет ничего сложного. И отчасти они окажутся правы, но не совсем. Ведь ремонт квадрокоптера требует внимания к деталям, и лучше когда этот ремонт производит специалист, который отремонтировал уже не первый дрон. К слову сказать, у него набита рука и погрешности в починки минимизируются.
Как мы все знаем, компания DJI делает качественные дроны в хорошем исполнении. Казалось бы от такого качества ремонта можно избежать на 100%. Но нет. Это вещь, и как любой другой вещи нужен уход. Собственно, квадрокоптеру тоже нужен уход. Основные поломки, которые у них могут встречаться – это:
- программные сбои и выход из строя;
- краши и падения дрона;
- следствия долгой эксплуатации;
- следствия износа;
- стики, на пульте управления не расположены по центру, а отклоняются;
- при получении SSID выдается ошибка;
- поломка камеры и других компонентов после падения;
- GPS навигация не срабатывает;
- падение дрона в воду;
- батарея не держит заряд и быстро садится;
- материнская плата повреждена, или ее отдельные компоненты;
- треснул или повредился пропеллер;
Если у вас есть поломка из списка выше, мой вам совет – делайте ремонт в сервисном центре или у частных мастеров. Не стоит этим заниматься самостоятельно, если вы в этом не разбираетесь.

В вашем городе наверняка есть такие люди, которые за небольшую плату произведут ремонт квадрокоптера DJI и у них наверняка есть необходимые детали и запчасти.
Приведу небольшую таблицу, в которой распишу средние цены на ремонт коптера DJI. Пока это статья существует информация актуальна. Если вы заметили какие-то несостыковки, напишите свой комментарий.
Предупреждаю: букв много, фоток тоже. Но я надеюсь, что мой опыт окажется кому-то полезным и/или интересным.
Началась эта история ещё около года назад, когда я, насмотревшись/начитавшись всякой инфы про квадрокоптеры, решился таки приобрести себе нечто подобное.
На что-то дорогое поначалу давила жаба, да и боязнь по неопытности убить летающую машину об асфальт брала своё. Решено было взять китайчонка – и управлять научусь, и если уроню – не так всё и страшно. Остановил я свой выбор вот на этом.
Эта фотка, если что, не моя)))
Это Syma X5C. По опыту управления могу сказать, что этот агрегатец можно считать идеальным для начинающих и неопытных.
Неубиваемость – падал с 15 метров на утоптанную землю – и ничего)))
Цена – я брал за 3500р год назад (с 5 аккумуляторами в комплекте)
Можно упражняться дома – коптер сравнительно небольшой
За эти деньги есть камера))) Она есть – и на том спасибо)
Легкий – ветром сносит на ура. Также в небольшом помещении его может сносить собственными потоками, отраженными от пола и стен
Качество видео и фоток оставляет желать лучшего
Нюанс: если выключить пульт раньше остановки съемки видео, то оно что? Правильно – не сохранится)
Моторы не очень долговечные – щётки горят
Докупал я к нему дополнительные защиты винтов (одну сломал об дерево, другую уронил на паляьник (не спрашивайте)) за 200р (8шт) и дополнительный комплект моторов 300р (4шт).
Всё вышеуказанное было приобретено в известном всем китайском магазине)
Но это всё лирика. В общем, налетался я за лето на этом малыше и захотелось мне большего.
Чтобы камеру годную прицепить, чтобы ветром не сносило, да и чтобы сам ко мне возвращался. Долго мучился, выбирал между различными RTF (готовыми к полёту) коптерами, но как-то не срослось.
И где-то в октябре я решил – хочу строить самостоятельно! Что ж я, не инженер, что ли.
Где-то с месяц полазив по тематическим сайтам, я прикинул, что нужно брать, во сколько мне это выльется и стоит ли оно того. Список покупок был составлен и я приступил непосредственно к поиску лучших цен и непосредственно покупке.
Итак, что же нам нужно для того, чтобы построить квадрокоптер?
1. Рама – собственно, основа нашей машины, на которую навешивается всё остальное добро, поднимаемое в воздух. Мой выбор остановился на Alien Reptile. У наших китайских друзей она стоила 1200 рублей. Пластины карбон, лучи пластик. Вот так она выглядит в собранном виде:
То, что надо) и даже ленту-липучку для аккумулятора прислали)
2. Моторы и ESC (регуляторы) – Выбирал долго, маялся жабой. Выбрал бюджетный комплектик, моторы на 920kv, регуляторы на 30A. Порядка 3800р за всё.
Небольшое примечание: как оказалось, у моторов разъемы для подключения есть (“папа”), а на регуляторах их нет. Пришлось экстренно дозаказывать разъемы (т.к. в Мск они стоят каких-то ломовых денег). Подробнее о разъемах в пункте 5.
3. Контроллер – это мозг коптера, который управляет всем, что делает коптер. Мой выбор остановился на APM. Прельстил набор полетных режимов, поддержка GPS и телеметрии. Также к нему можно будет без проблем в будущем подцепить подвес для камеры (да и не только, в принципе можно любую периферию). Заказывал я сразу комплект (заплатил в районе 6800р, если мне память не изменяет), в котором были:
б) Виброопора для контроллера (чтобы от вибрации у наших электронных мозгов не было сотрясения)
в) GPS-модуль (он же, по совместительству, компас)
г) Модули телеметрии (чтобы, скажем, на ноуте или планшете видеть параметры систем коптера в рельном времени)
д) Модуль питания (по существу – это отвод силового кабеля для питания самого коптера)
е) Куча различных проводов)
4. Всю эту красоту надо от чего-то запитать. Энергии нужно много, посему избрал я для себя вот такие аккумуляторы (брал новые с рук через форум профильного сообщества) 4500р за пару.
К слову сказать, я перепаял разъемы на аккумах (заменил на XT60) для совместимости с модулем питания и остальной электрикой.
5. Раз зашёл разговор об электрике, купил я ещё силовые провода в силиконовой оплётке (12AWG, самые толстые,их фотки, к сожалению, нет) за 140р (2 куска по 1 метру), термоусадочную трубку и разъемы “пуля” для соединения регуляторов с моторами за 360р.
6. Нам нужно как-то грамотно организовать раздачу питания от аккумулятора к регуляторам. Для этого используют либо плату распределения питания, либо проводные соединения. Я предпочел плату. 160р.
7. К нынешнему моменту, я думаю, многие задались вопросом: “нет, ну это, конечно, хорошо, только вот как этот парень надеется запустить коптер без пропеллеров?” А вот и они) 400р/8шт, брал с запасом.
8. К слову сказать, пропеллеры, которые идут с Али, обычно разбалансированные, поэтому может возникнуть дополнительная вибрация и болтание коптера. Купил себе балансир. Из Китая ждать долго, поэтому купил в Москве. 925р.
9. Ну и последний пункт по порядку, но не по значению: радиоаппаратура. Это та самая часть, которая делает БЕСпилотник таковым)
Прошвырнувшись по предложениям, я понял, что новая аппа будет стоить денег заоблачных.
Посему приобрел себе с рук б/у-шную, но в отличном состоянии аппаратуру Turnigy 9XR с передатчиком FrSky DJT (ибо стоковый у этой аппы в некоторых модификациях убогий, а в некоторых отсутствует). 4000р. Цена более чем достойная.
10. И, наконец, то, что будет связывать аппу с коптером и будет действовать, как говорится, от её лица: приемник. Брал, опять же, б/у-шный с рук, совместимый с передатчиком. FrSky D8Xr-II. 1200р.
Также я купил 5 пар разъемов XT60 за 425р, для соединения платы распределения питания с регуляторами. Но если разъемное соедиенение в этом месте не нужно, можно обойтись одним XT60 “папа”. В одном из следующих постов я расскажу, где именно.
В общем, это всё, что нужно из компонентов. По стоимости вышло чуть менее 23000 рублей, если оставить за скобками балансир (т.к. его можно взять у кого-либо погонять или попросить за пивас/мороженку/шоколадку отбалансировать свои пропы), но, признаюсь, мне очень повезло с ценой на аппаратуру и аккумуляторы.
В посте использованы картинки, нагло взятые с просторов и фотки, снятые на YotaPhone 2, позаимствованный у супруги.
Сегодня я засяду за пайку платы распределения питания, и, если, хватит времени, за напайку разъемов к регуляторам. Если кому это будет интересно, расскажу об этом поподробнее в следующем посте, который я постараюсь выпустить поскорее.
Причины по которым коптероводы-любители задумываются о том, как собрать квадрокоптер своими руками бывают разными. Например, кого-то не устраивают цены, кто-то хочет установить свою камеру, которая не устанавливается ни на один подвес, другие хотят получить конфигурацию только для гонок. Да мало ли что еще!
Что собой представляет квадролет
Общий принцип работы беспилотника
Инструкция по сборке простого беспилотника
Второй способ сборки квадрокоптера собственноручно
Далее мы расскажем вам о том, какие важные составляющие должны находиться на борту вашего коптера. Чтобы вы знали, с чего, собственно, надо начинать строить свой воздушный «дом» и какие важные детали вам пригодятся.
Для тех, кто пока еще не в теме — это конструкция, платформа, сооружение, летательный аппарат, кому как удобнее, которая (если мы говорим о платформе) управляется передатчиком. Имеет 4 двигателя с тем же количеством винтов. В сборке таких летательных аппаратов непременно присутствует летающая многомоторная платформа.
Когда беспилотник взлетает, он занимает горизонтальное положение. Как и вертолет он способен зависать над поверхностью земли на разной высоте. Летает в разные стороны. Раньше коптеры умели летать лишь только в сторону своего носа. Это только в последние годы стали делать модели типа Headless, когда дрон во время полета мог резко полететь в любую из четырех сторон, не поворачиваясь при этом в эту самую сторону своей носовой частью.
Коптер способен подниматься и опускаться, при этом он всегда остается в горизонтальном положении относительно земли. Если же на нем установленно специальное оборудование, то в некоторых случаях он может летать даже в режиме автопилота. Большинство авиалюбителей используют такие возможности , прежде всего для того, чтобы сосредоточиться в этот момент на аэросъемке, а не являть миру свое пилотажное мастерство.
Как мы и говорили ранее, система является мультироторной. Эти самые роторы создают мощное диагональное вращение в противоположных направлениях. У этих роторов имеется так называемый управленец, собирающий информацию с трех, или с шести гироскопов (количество последних зависит от конфигурации коптера) и передает ее роторам.
Гироскопы (замудренное какое название), гироскопы были созданы для того, чтобы автоматически определять положение аппарата во время полета и затем фиксировать его во всех трех плоскостях. При этом акселерометр делает так, чтобы коптер занял идеальное положение по горизонтали. А чтобы закрепить квадрокоптер на определенной высоте, полетная система оборудуется бародатчиком.
За счет чего происходит движение коптера, если все четыре винта крутятся одинаково? А за счет простой смены скорости вращения той или иной пары моторов.Результатом становтися наклон коптера, или как его еще называют «крен» в сторону наиболее слабокрутящихся винтов и коптер летит по горизонтали.
В большинстве случаев роторов строго четыре, но периодически вы можете встретить коптеры с шестью и даже восемью винтами. Поэтому их называют мультикоптерами, а слово «Квадрокоптер» уже не будет актуальным к последним двум представителям мультироторных дронов.
Итак, общее представление о деталях и модулях будущего квадрокоптера у вас уже сложилось, теперь настала пора поделиться с вами тем, как же собрать дрон собственноручно.
Первое, что приходит на ум при сборке собственного квадрика — это, конечно же, его рама. Ничего сложного с этим элементом нет. Для ее основы сойдет обычная фанера размером 15 квадратных сантиметров. Лучи приспособляются с помощью винтов по диагональной разметке вашей рамы. Луч должен быть 30 сантиметровой длины начиная от центра коптера. Балки — 25см. Дырки для самих двигателей отложим на самый конец создания корпуса, предварительно сделав разметку по движкам.
В первую очередь устанавливаем управляющую плату. При этом разместите ее как можно ближе к центру вашей платформы. Поэтому с самого начала сделайте необходимые, и самое главное, точные замеры в этом случае аппарат не будет заносить из стороны в сторону во время полета. Используйте саморезы достаточной длины, для того, чтобы прикрутить лучи к плате. Ленточка из алюминия подойдет для посадочных лыж и держания аккумулятора.
Установите приемник вплотную к плате. Чтобы установить приемник можно использовать какой-нибудь мощный суперклей. Упрощенный вариант соединения двумя трехжильными шлейфами возможно в том случае, когда приемочные каналы по своему назначению такие же как и каналы управляющей платы. Имейте это в виду.

Как обычно, прежде чем его вставлять, необходимо сделать точную разметку лучей и проделать отверстия под сам движок. Сделайте все возможное, чтобы расстояние от краев до оси вращения эквивалентным. По крайней мере, насколько это только возможно. При установке двигателя из его дна будет торчать валовый хвост. Поэтому для него нужно сделать специальное отверстие.
При сверлении отверстий для крепления сверлите на всю ширину квадрата и насквозь. Тогда вы сможете сразу видеть будет ли цеплять вал за края этого квадрата.
С помощью переходников сделайте параллельное соединение 4х проводов питания.. В том месте, где батарея будет подключаться ко всем четырем проводам нужно будет воспользоваться разъемными соединения. В остальных местах необходима будет спайка, затем затяните все детали в термоусадку, чтобы во время сильной вибрации (когда коптер будет летать) что-нибудь не выскочило и не отсоединилось.
Теперь займемся управляющей платой и подключаем провода драйверов. В принципе, после этой операции можно сделать небольшую проверку и устранить проблемы, которые выявятся при тестировании.
Не важно каким способом вы будете собирать свой первый сборный летательный аппарат, одно вам надо запомнить. Не жалейте денег на детали, из которых вы будете собирать дрон. Только в этом случае, с большей долей вероятности, сборка у вас получится более качественной и незначительные неточности и погрешности вам будут прощены, ну или почти прощены.
При сборке своего квадрокоптера вторым способом мы рассмотрим вариант с использованием Arduino Mega, прошивки Мега-Пират.
Что потребуется для сборки? 5 моторов, включая 1 запасной мотор. Приобретите также два комплекта лопастей, один рабочий, второй также для запаса. Напоминаем вам, что там должно быть два обычных винта и два с обратным вращением. Регуляторы скорости. Их должно быть не менее четырех штук (если вы собираете квадрокоптер). И опять же как минимум столько же запасных.
Батарею для такого дрона лучше взять меньшего размера, чтобы она не утяжеляла коптер.
Советуем использовать несколько легких и маленьких. Да, дрон будет меньше летать в течение одного жизненного цикла такого мини-аккмулятора. Но при этом полет у вас будет более стабильным. Тем более, что процесс замены аккумулятора не займет много времени.
Рама для вашего квадрокоптера должна быть легкой и одновременно с этим прочной. Вспомните то, какую раму мы описали в первом случае самостоятельной сборки. Так вот, такая рама вполне подойдет и для этого варианта. Из электронной начинки необходимы будут: плата «Все в одном», акселерометр, батареи, микроконтроллер, гироскоп, а также множество болтиков, винтов, проводочков и различного вида стяжек. Не забудьте также про паяльник и дрель.
Когда вы убедитесь в том, что все необходимое у вас имеется в наличии, то можно смело приступать к сборке. Процесс сборки можно повторить, пользуясь первым методом, который был описан выше. Самое главное, чтобы от каждого конца луча и до центра рамы расстояние было одинаковым. Проследите за тем, чтобы пропеллеры не касались друг друга и, что важно — центральную часть рамы.
Потому что именно там будут размещаться электронные мозги вашего дрона, плюс видеокамера, которую, кстати, можно установить по желанию.
Если вы вмонтируете ваши датчики в резину или, скажем в силиконовую массу, то этим самым сила вибрации во время работы пропеллеров будет погашена. В качестве шасси можно сделать и закрепить пенопласт на самых концах лучей. Для более мягкой посадки их можно прорезинить или прикрепить поролон.
Ну, а если вы не хотите собирать плату самостоятельно, то мы рекомендуем вам купить уже готовую плату, на которой уже установлено 4 датчика, гироскоп, который будет замерять угловое ускорение, акселерометр, измеряющий ускорение, барометр, отвечающий за выборы нужной высоты и удерживающий квадрокоптер именно на ней, а так же магнинтометр, отвечающий за то, куда будет лететь дрон.
Сегодня достаточно легко найти необходимую прошивку, скачать и установить. После ее загрузки в Arduino, закачайте программу для настройки. Запустив программу, вы попадете в меню «Опции», там войдите в СОМ-порт Ардуино и в меню Экшн — АС2 Setup. Чтобы настройка квадролета получилась верной, старайтесь неукоснительно выполнять инструкции (подсказки) во время процесса установки и работы программы.
Так, например в одном диалоговом окне вам предложат двигать рычаги на передатчике до самых больших и малых значений, а в другом — попросят, чтобы вы проконтроллировали положение коптера. Он должен стоять ровно для точной калибровки датчиков.
Когда калибровка завершится, вам надо будет разомкнуть А5 с GND и в меню, в пункте АС2 Сенсор найдите вкладку Raw Sensor, чтобы проверить, верно ли работают датчики. При этом нужно ориентироваться на стрелкуВо время поворота нашей платы стрелка должна доходить до нужного значения. Если этого не происходит или она наоборот зашкаливает, значит у вас проблемы с датчиками или коэффицентами в коде.
Передатчик проверяется следующим образом, если уровни передвигаются как положено, то при нажатии на рычаг газа в течение пары секунд вправо и вниз, у вас будет мигать красный диод. Если же двигать стик вверх, то показатели должны быть идиентичными, то есть светодиод снова должен гореть красным цветом.
Настало время взлетать. Перед этим установите мультикоптер на расстоянии примерно 10-12 метров от себя. Наклоните рычаг газа вниз и вправо. Коптер должен будет взлететь. Если же вместо этого он стоит на месте, пропеллеры работают, а он трясется, то необходимо будет настроить конфигурацию PID в соответствующем меню.
Беспилотные летательные аппараты (дроны) – это высокотехнологичная дорогостоящая техника. Однако вполне доступными видятся «беспилотники» любительского уровня исполнения. Не случайно последние годы быстро набирают популярность среди обывателей небольшие дроны, в том числе собранные своими руками. Новая, так называемая технология FPV (First Person View) – вид от первого лица, даёт уникальный опыт полёта каждому желающему. Радиоуправляемый авиамоделизм всегда имел спрос молодёжного социума. Появление дронов лишь подстегнуло этот спрос, легко удовлетворяемый, если купить готовую летающую машину, либо собрать дрон собственными руками.
Квадрокоптер (дрон) — конструктивное исполнение беспилотного летательного аппарата, принадлежащего к числу наиболее популярных проектов авиамоделизма.
Самый простой способ обзавестись БПЛА – просто взять и купить квадрокоптер (дрон), благо рынок (включая сеть Интернет) свободно предоставляет такую возможность.
Однако для большего интереса и с целью лучшего понимания – что такое дрон, практичнее и экономичнее собрать квадрокоптер своими руками (DIY – Do It Yourself), к примеру, из набора готовых деталей. Более серьёзный вариант – сборка квадрокоптера (дрона) с нуля – используя минимум готовых компонентов.
Прежде чем начинать сборку беспилотника собственноручно, потребуется определиться с компонентами для создания квадрокоптера (дрона). Поэтому рассмотрим список базовых компонентов, составляющих конструкцию классического квадрокоптера (дрона):
Раму дрона (квадрокоптера) допускается строить, используя разные материалы:
Если выбор пал на деревянную раму дрона (как самую простую с точки зрения технологии), понадобится деревянная доска толщиной около 2,5-3,0 см., длиной 60-70 см.
Доска разрезается таким образом, чтобы получились две планки длиной 60 см и шириной 3 см. Эти две планки — структура будущего квадранта квадрокоптера.
Структура рамы дрона выстраивается простым пересечением двух деревянных планок под фрейм-фактор «X». Полученную раму усиливают прямоугольной деталью – сшивкой, в центральной части. Размер прямоугольника составляет 6 × 15 см, толщина 2 мм. Материал тоже дерево.

Классическая конфигурация рамы квадрокоптера (дрона), которая применяется в большинстве случаев сборки своими руками. Показан вариант с установленными двигателями и контроллером
Не исключаются другие размеры рамы квадрокоптера (дрона), отличные от заявленных, но не следует забывать о соблюдении пропорций. Соединение частей рамы обычно выполняется гвоздями и клеем.
Вместо дерева допускается применить металл или пластик тех же размеров. Однако способы соединения планок будут уже иными.
Ниже список готовых карбоновых рам квадрокоптеров (дронов), имеющихся в продаже на рынке:
- LHI 220-RX FPV
- Readytosky FPV
- iFlight XL5
- RipaFire F450 4-Axis
- Usmile X style
- Readytosky S500
Под изготовление классического квадрокоптера (дрона) необходимо иметь 4 двигателя. Соответственно, если задуман проект октокоптера, потребуется уже восемь двигателей.
Рекомендуется применять бесщёточные моторы. Этот вид электродвигателей меньше нагружает аккумулятор, что является важным критерием эксплуатации дронов.

Один из вариантов изготовления пропеллеров моторов квадрокоптера (дрона). Материалом выбран жёсткий пластик, учитывая малые габариты конструкции
На русском языке модуль ESC (Electronic Speed Controllers) квадрокоптера называют – электронный контроллер скорости. Это не менее важная часть беспилотного летательного аппарата, чем электромотор.
Модули ESC отвечают за корректную передачу мощности моторам дрона. Количество модулей квадрокоптера соответствует числу электромоторов.
Вот некоторые из рекомендуемых моторов для квадрокоптеров (дронов):
- Emax RS2205 2600KV Brushless Motors
- DLFPV DL2205 2300KV Brushless Motors
- Gemfan GT2205 2650KV Brushless Motors
- HOBBYMATE Quadcopter Motors Combo
И в дополнение к списку рекомендуемые контроллеры скорости:
- 35A ESC BlHeli32 32bit DSHOT1200
- Thriverline Sunrise ESC 20A BLHeli-S
Пропеллеры можно купить металлические 9-дюймовые. Эти изделия по доступной цене свободно приобретаются на рынке.
Металлические конструкции прочны, не поддаются изгибу при высоких нагрузках в процессе полёта. Однако для более высокой производительности винтов – лучший вариант карбоновые пропеллеры. Например, эти:
- BTG Quick Release Carbon Fiber Reinforced Propellers
- Performance 1245 Black Propellers MR Series
- YooTek 4 Pairs Foldable Quick Release Propellers
- Myshine 9450 Self-tightening Propeller Props
- Jrelecs 2 Pairs Carbon Fiber Propellers
Набор электроники дронов (квадрокоптеров) традиционно состоит из контроллера полёта и беспроводной системы управления. Сюда же можно отнести и модуль питания, так как большинство питающих модулей наделяются электронной системой мониторинга АКБ.
Состояние заряда аккумулятора – важный момент полёта. Трудно представить, что станется с аппаратом, если АКБ разрядится, к примеру, во время полёта над водоёмом.
Контроллер полёта поддерживает стабильность полёта квадрокоптера, путём обработки данных относительно направления и силы ветра, а также многих других параметров.

Контроллер полёта на чипе STM32F103C8T6: 1, 2 — пищалка ( ; -); 3 — поток; 4 — RCCI; 5 — корпус; 6 — 5 вольт; 7 — батарея; 8, 9 — UART TX, RX; 10 — индикатор полосы; 11, 12, 13, 14 — моторы; 15 — PPM
Контроллер, как правило, оснащается так называемой «прошивкой» — микросхемой памяти, куда записываются базовые сведения для чипа, подобного микроконтроллеру фирмы AVR.
Контроллер полёта можно купить в готовом варианте, но не исключается также сборка схемы своими руками. Правда, для второго варианта необходимо иметь навыки электронщика и соответствующие знания программирования. Поэтому проще всё-таки воспользоваться готовыми решениями. Например, одним из следующих:
ArduPilot – качественный контроллер (дорогостоящий), предназначенный для летательных аппаратов беспилотного управления. Прошивка отличается наличием полностью автоматизированных режимов полёта. Система обеспечивает высокие технические характеристики.
OpenPilot CC3D – система на базе Digital Motion Processor, наделённая целым семейством датчиков организации полёта. Включает в состав трёхкоординатный акселерометр и гироскоп. Проект достаточно легко настраивается и устанавливается. Имеется руководство пользователя.
NAZE32 – тоже достаточно гибкая и мощная система, но видится несколько усложнённой в плане настройки. Оснащается продвинутой программой прошивки.
KK2 – одно из популярных решений, которое часто выбирают начинающие, так как контроллер относительно недорогой и оснащается ЖК-дисплеем. Основой схемы является микроконтроллер AVR одной из последних модификаций. Схемой предусматривается подключение датчиков MPU6050. Однако настройка только ручная.
Беспроводная система дистанционного управления состоит из передатчика и приёмника радиосигналов. Посредством системы ДУ осуществляется не только управление полётом, но также управление положением видеокамеры, установленной на дроне.

Пульт управления дроном (квадрокоптером) в классической вариации передатчика радиосигнала с возможностью мониторинга через ЖК-дисплей
Здесь, как правило, используются исключительно готовые решения. Например, любая из систем ДУ в списке ниже:
- Futaba 10JH 10-Channel Heli T-FHSS Computer Radio System
- Turnigy 9xr PRO Radio Control System
- Spektrum DX8 Radio Transmitter
- YKS FlySky FS-i6 2.4GHz 6 Channels Radio Control System
На созданной раме устанавливаются электродвигатели. Возможно, придётся рассчитать местоположения моторов и просверлить в раме отверстия под крепление, если нет иных вариантов.

Примерно по такой механической схеме рекомендуется закреплять электромоторы на раме квадрокоптера (дрона). Правда, многое в креплении зависит от материала рамы
Затем монтируются контроллеры скорости. Традиционно эти модули устанавливаются на нижней плоскости рамы. Контроллеры скорости через ленточные кабели соединяются непосредственно с двигателями.
Далее на раму добавляется посадочный модуль – часть конструкции, предназначенная для организации «мягкой» посадки дрона. Исполнение этого конструктивного элемента должно предусматривать смягчение ударов при посадке на твёрдую почву. Конструкции возможны разного плана.
На следующем шаге монтируется контроллер полёта. Месторасположение этого модуля не критично. Главное, чтобы обеспечивалась защита электроники и бесперебойная работа.
Рекомендуется подложить под электронную плату кусок губчатого материала для гашения вибраций, передаваемых работающими электродвигателями квадрокоптера.
Контроллер полёта дрона соединяется по прилагаемой схеме к модулю (приёмнику) дистанционного пульта управления и к электронной плате регулировки скорости моторов. Все соединения делаются посредством надёжных разъёмов, а наиболее важные точки «садятся» на оловянную пайку.
В принципе, основная сборка на этом завершается. Но спешить закрывать дрон корпусом не стоит. Необходимо протестировать все системы – датчики и другие компоненты квадрокоптера, используя для этого специальный софт OpenPilot GCS (CC3D и GCS). Правда, релиз программы довольно старый и новыми разработками может не поддерживаться.
После теста собранный аппарат – беспилотный квадрокоптер готов к полёту. В дальнейшем дрон несложно модернизировать — оснастить видеокамерой и прочими устройствами, расширяющими функциональность.
Оцените статью:
Средние цены на ремонт квадрокоптеров dji phantom
| Наименование ремонта | Среднее время ремонта | Средняя цена, руб |
| Ремонт и замена GPS модуля | 60 минут | 3000 |
| Замена NAZA | 50 минут | 3000 |
| Ремонт и замена мотора | 60 минут | 2000 |
| Ремонт корпуса, замена компонентов | 120 минут | 4000 |
| Замена компаса | 50 минут | 2000 |
| Ремонт и замена подвеса VISION | 180 минут | 5000 |
| Ремонт и замена подвеса ZENMUSE | 120 минут | 3000 |
| Ремонт и замена регулятора вращения | 180 минут | 3500 |
| Ремонт и замена деталей центральной платы | 120 минут | 5000 |
| Ремонт и замена Шасси | 40 минут | 1000 |
| Замена шлейфа | 50 минут | 3000 |
| Установка и модернизация FPV системы | 120 минут | 3000 |
| Установка бустера | 50 минут | 3000 |
| Установка DJI Light Bridge | 220 минут | 3000 |
| Установка и подключение DJI Bluetooth Ground Station | 60 минут | 3000 |
| Установка подвесов ZENMUSE | 80 минут | 3000 |
| Ремонт камера VISION | 40 минут | 3000 |
| Ремонт подвеса Vision Plus | 180 минут | 3000 |
| Модернизация прошивки и калибровка | 40 минут | 1000 |
Как видите ремонт квадрокоптера может оказаться удовольствием не из дешевых, но все же если вас настигла такая участь как сломанный дрон, то обращайтесь за помощью в сервисные центры или к частным мастерам. У этих ребят однозначно есть необходимые запчасти и лицензионные программы для перепрошивки.
Я же вам желаю всего доброго, и обращайтесь к своим летающим товарищам бережно.





 купить по привлекательной цене 46990 руб. в Москве")