

- Что не так с другими передатчиками flysky?
- Что еще можно почитать
- Eachine minicube flysky rx
- Ev1527
- Failsafe
- Fli14 mini
- Flit10
- Flysky fs2a 4ch pwm
- Flysky fs-a8s v2
- Flysky fs-i10
- Flysky fs-i6
- Flysky fs-i6s
- Flysky fs-i6x
- Flysky fs-i8
- Flysky ia8x
- Flysky x6b
- Flysky x8b
- Flysky fs-ia8s
- Flysky fs-rx2a
- Flysky fs-rx2a pro v1
- Fs82 micro
- Fs-ft18 paladin
- Fs-th9x
- Moy rxa2-10
- Nv14 – nirvana
- Tl;dr… для тех кто не осилил весь текст: первое место flysky i6x
- Turnigy evolution
- Turnigy ia6c
- X-boss rx2a pro
- Если ли аппаратура лучше, чем flysky i6x?
- Зачем покупать аппу и приемники flysky?
- История изменений
- Как и чем управлять
- Передатчик
- Передающая часть
- Последовательные протоколы
- Приемник
- Приёмники flysky
- Пример №1 — управляем светодиодами
- Пример №2 — приемник и передатчик в одном флаконе
- Примеры использования
- Программная реализация
- Протоколы передатчиков flysky
- Протоколы приемников flysky
- Пуск!
- Работа
- Реализация в железе
- Сколько нужно каналов управления?
- Список моделей передатчиков от flysky
- Телеметрия
- Технические детали: протоколы в передатчиках и приемниках flysky
- Типы модулей
Что не так с другими передатчиками flysky?
i8 и i10 дают больше каналов и у них больше тумблеров, однако, несмотря на попытку использования сенсорного экрана, мне кажется, что эти передатчики не дают преимуществ по сравнению с i6X.
Конечно, с точки зрения FlySky имело смысл создать эти передатчики, однако они ориентированы на меньшую аудиторию. После того как появился передатчик FrSky Taranis QX7 по схожей с FS-i8 цене, в ценовом диапазоне около $100 наблюдается жесткая конкуренция.
Появляются и другие варианты для тех, кто не уверен в выборе той или иной системы. Можно купить как мультипротокольные передатчики, так и внешние модули для использования приемников FlySky, FrSky, Futaba или Devo, а также для кучи игрушечных коптеров.
Jumper T8SG с прошивкой Deviation и iRangeX iRX-IR8M, с ценой $70-$80 — тоже хороший вариант.
Что еще можно почитать
— описание и документация на сайте производителя.
Eachine minicube flysky rx
Купить на Banggood
Благодаря монтажным отверстиям формата 20 на 20 мм и наличию пищалки, Eachine Minicube Flysky RX — отличный приемник для уличных моделей размером 100-180 мм.
Однако, в нём нет второй антенны для диверсити и отсутствует телеметрия. Minicube весит 3,1 грамм включая пищалку, и это самый дорогой приемник, стоимостью более $15.
- Протоколы: iBUS, PPM
- Радиус: 300 метров
- Failsafe: есть
- Телеметрия: нет
- Предназначен для моделей размером от 120 мм
- Вес: 3,1 грамм
Ev1527
— это один из самых популярных аппаратных кодеров/декодеров для использования в различных радиоуправляемых устройствах (розетках, лампах, воротах, шлагбаумах). Интересен он в первую очередь тем, что использует очень простой ШИМ-подобный метод кодирования информации, заключающийся в том, что логические нули и единицы в сигнале кодируются разным соотношением длительности импульса и тишины:

Единичный бит кодируется последовательностью {3; 1}, т.е. сначала в течение 3-х некоторых отсчетов времени предается высокий уровень, а затем 1 отсчет времени — низкий. Нулевой бит имеет обратные значения {1; 3} — 1 высокий импульс и 3 низких. Длина единичного отсчета времени (импульса) у EV1527 составляет 350 микросекунд. Кроме того, перед данными передается особая преамбула, имеющая формулу {1; 31}:

Она позволяет приемнику отследить начало передачи данных и начать их принимать. В зависимости от реализации преамбула может передаваться как в начале, так и в конце посылки. Это не играет большой разницы, так как в целях повышения надежности посылки с сообщениями отправляются многократно (10 и более раз подряд). Кодированная данным протоколом единичная посылка из 8 бит двоичного числа 10101010 выглядит как-то так:

В стандартном исполнении посылки EV1527 имеют длину 3 байта (24 бит), но что мешает нам в личных целях использовать любой размер передаваемых данных? В идеальных условиях — ничто не мешает, но в реальности слишком длинные сообщения данным методом передавать не выйдет из-за помех и отсутствия какого-либо устранения ошибок.
) поэтому я решил реализовать именно его. Существует множество разновидностей таких протоколов, есть даже трехуровневые (tri-state) вариации, где бит помимо стандартных «0» и «1» может принимать третье значение «F» и называется
, но я реализовал только самый простой вариант — двоичный.
Failsafe
Как видите при использовании приемников FlySky придется чем-то пожертвовать если failsafe вам необходим. Он возможно не нужен для моделей на которых летают в помещении или для микромоделей для полетов в саду, но значительно более важен, чем наличие телеметрии.
Как видите, failsafe в некоторых приемниках доступен не для всех протоколов. Он более важен чем телеметрия, т.к. минимизирует шанс неадекватного поведения модели в случае потери сигнала управления. Убедитесь, что вы используете протокол, который поддерживает Failsafe!
Fli14 mini
Купить на:
Легкий приемник, который может выдавать RSSI на 14 канале и поддерживает протокол AFHDS-2A.
- Протоколы: iBUS
- Радиус: 500 метров
- Failsafe: нет
- Телеметрия: есть, RSSI и vBAT
- Предназначен для моделей размером до 130 мм
- Вес: 1,7 грамма
Flit10
Купить на:
Похож на Fli14 , с двумя антеннами, что дает более уверенный прием.
- Протоколы: iBUS
- Радиус: 500 метров
- Failsafe: нет
- Телеметрия: есть, RSSI и vBAT
- Предназначен для моделей размером до 130 мм
- Вес: 3,1 грамма
Flysky fs2a 4ch pwm
Это разновидность приемника FS-RX2A, но с 4 PWM выходами и без поддержки PPM/SBUS. На нем установлены серворазъемы, идеально подойдет для микро самолетов и летающих крыльев. Совместим с протоколом AFHDS 2A.
- Протоколы: PWM (4 канала)
- Радиус: 400 метров
- Failsafe: есть
- Телеметрия: нет
- Вес: 0,9 грамма
- Размеры: 11 х 25 мм
- Совместимые передатчики: FS-I6, FS-I6X, FS-I6S, FS-TM8, FS-TM10, FS-I10 и другие с протоколом AFHDS 2A
Купить на: Banggood | AliExpress
Flysky fs-a8s v2
Купить на
FS-A8S — это один из первых микроприемников от FlySky, он весит всего 1,2 грамма и обычно поставляется в комплекте с аппаратурой управления.
Было довольно много жалоб о проблемах с сохранением выбранного протокола, автоматическим переходом с iBUS на 8 канальный PPM при включении питания, что могло привести к фэйлсейву.
Во второй версии исправили эти проблемы, но есть сообщения о проблеме с «дрожанием полного газа», когда канал газа меняет значение по рандому (случайным образом), если поставить газ 100% (позже протестирую и обновлю эту статью).
В то время как по весу этот приемник подходит для микрокоптеров (размером меньше 100 мм), длина антенного провода слишком большая для таких применений.
- Протоколы: PPM, iBUS
- Радиус: 300 метров
- Failsafe: есть при использовании iBUS, отсутствует при работе в режиме PPM
- Телеметрия: нет
- Предназначен для моделей любого размера
- Вес: 1,2 грамма
Flysky fs-i10
Купить на:
FS-i10 это топовая аппаратура от Flysky, она поддерживает 10 каналов, имеет 5 крутилок и 7 тумблеров. Как и i8, в i10 установлен литиевый аккумулятор и USB-порт для его зарядки и подключения к симуляторам.
Внешне i10 выглядит более классически, чем i8, но опять внешний вид испорчен тачевым экраном! I10 и i8 весят 720 грамм, что почти вдвое больше, чем i6S, которая весит 410 грамм.
Flysky fs-i6
Купить на
FS-i6 часто используется в готовых RTF наборах, поэтому, я думаю, куча производителей считают эту аппаратуру подходящей новичкам.
Она продается уже несколько лет и сейчас есть немало хорошо документированных хаков (домашних неофициальных модификаций) для неё, начиная от замены крутилок 6 позиционными тумблерами; до ручек, напечатанных на 3D принтере и т.д.
В FS-i6 используется новый протокол AFHDS 2A (кстати, он обратно совместим с оригинальным AFHDS).
Изначально доступно 6 каналов, но их число можно увеличить до 10, если обновить прошивку на кастомную. Эта прошивка также позволит полноценно использовать все 4 имеющихся 4 тумблера и 2 крутилки.
Flysky fs-i6s
Купить на
FS-i6S — это первое обновление модели i6, функционал соответствует оригиналу, но учтите, что i6S не совместима со старым протоколом AFHDS, с ней работают приемники с AFHDS 2A. Это очень важно, т.к. многие микроприёмники для коллекторных коптеров поддерживают только оригинальный AFHDS протокол.
Выглядит FS-i6S очень даже ничего! Почти также, как будто Стив Джобс приложил свою руку к её разработке! Крутилки VrA и VrB перенесены в более удобное место по углам, торчат только края, из-за этого аппа выглядит минималистично.
Тренерский разъем тоже перемещен в более удобное место, снизу передатчика, рядом с Micro-USB портом (для симуляторов и обновления прошивки). Думаю, это было правильное изменение.
Я действительно считаю, что иногда дизайнеры могут менять внешний вид в угоду функционалу, как это произошло с триммерами. В идеале, вы должны триммировать вашу модель при помощи субтриммеров в меню аппаратуры, затем сохранить эти значения в памяти устройства.
i6S поддерживает 10 каналов в приемниках iBUS/SBUS. Несмотря на достоинства и футуристичный вид, я не очень доволен этим вариантом, именно из-за тримметров, и из-за отсутствия обратной совместимости!
Flysky fs-i6x
Купить на
FS-i6X — самое последнее обновление i6, с сохранением дизайна оригинала. В отличие от i6S, Х-версия имеет обратную совместимость и поддерживает оба протокола: AFHDS и AFHDS 2A.
Простым обновлением прошивки при помощи кабеля из комплекта, мы получаем 10-канальную аппаратуру безо всяких хаков и модификаций. По сравнению с i6 увеличилось количество хранимых моделей, теперь 20 штук.
В расположении органов управления этой аппы вполне могли поучаствовать дизайнеры версии i6S, но они застряли на форм-факторе оригинальной модели i6, т.е. проявились недостатки дизайна старой версии. В модели S появился USB порт, но тут (в i6X) он, к сожалению, исчез, т.е. чтобы использовать аппаратуру в симуляторах вам придется купить дополнительный адаптер.
Тренерский порт в оригинальной i6 и в новой i6X работает как порт для обновления прошивки, тренерский порт и порт для симулятора; он расположен по центру сзади передатчика. Если вы летаете в симуляторе, то каждый раз кладя передатчик на стол вы проверяете кабель и тренерский разъем на прочность, и случайно можете сломать его! Переподключение круглого разъема типа PS2/S-video — не такой простой процесс.
Замечу, что кабель для обновления прошивки из комплекта FS-i6 и FS-i6X нужен только для обновления прошивки и не работает как «тренер» и не может быть использован в симуляторе. Эти кабели нужно покупать отдельно.
Flysky fs-i8
Купить на
FS-i8 — это довольно новая модель FlySky, как и указано в названии поддерживается 8 каналов, это промежуточная модель, между i6 и i10.
В i8 вновь появился USB-порт, теперь он служит для зарядки встроенного LiPo аккумулятора (вся серия i6 питается от батареек АА). USB-порт также работает как тренерский и как джойстик для симулятора. Минус — дизайн антенны, есть кое-какие беспокойства относительно её надежности.
Дизайн заимствован у i10, при этом i8 не самый лучший передатчик в плане внешнего вида (кто-то даже скажет, что это грубое преуменьшение), но можно еще отметить и цветной сенсорный экран.
Я думаю, что размер экрана может помочь, если у вас не очень хорошее зрение, но TFT экраны этого размера довольно сложно читать на ярком солнечном свету, особенно по сравнению с монохромными LCD. Я также считаю, что тачскрин — это больше трюк от маркетологов, чем необходимая функция; несмотря на это, я уверен, что в ближайшее время мы увидим сенсорные экраны, которые действительно более полезны пользователям.
Flysky ia8x
На данный момент это самый маленький приемник от Flysky.
- Протоколы: PPM и iBUS
- Радиус: 200 метров
- Failsafe: не известно
- Телеметрия: есть
- Вес: 2 грамма
- Размеры: 15 х 13 х 3 мм
- Совместимые передатчики: все с протоколом AFHDS 2A
Купить на:
Flysky x6b
Купить на
FS-X6B — это приемник с диверсити (2 антенны), дополнительное преимущество платы размером 36 на 22 мм в том, что монтажные отверстия расположены на расстоянии 30,5 мм, т.е. его можно поставить в стек с ПК.
Передача данных двунаправленная, так что есть телеметрия с датчиков на ПК. У FS-X6B Failsafe работает как для iBUS, так и для PPM.
Вес 4,5 грамма, это самый тяжелый приемник в нашем списке, наличие двух антенн увеличивает надежность приема сигнала, идеально для моделей размером 180 мм и больше.
- Протоколы: iBUS, PPM
- Радиус: 300 метров
- Failsafe: есть при использовании iBUS и PPM
- Телеметрия: есть
- Предназначен для моделей размером от 180 мм
- Вес: 4,5 грамм
Flysky x8b
- Протоколы: PPM, iBUS (8 каналов)
- Радиус: 300 метров
- Failsafe: не известно
- Телеметрия: не известно
- Вес: 3,7 грамма
- Размеры: 32 х 22,5 х 7,5 мм
Купить на:
Flysky fs-ia8s
Этот приемник разрабатывался вместе с UndergroundFPV, специально для Nirvana NV-14. У него диверсити антенны и есть поддержка протокола AFHDS 2A. Выходные сигналы: PPM / i-Bus / S-Bus.
- Протоколы: SBUS, PPM, iBUS
- Радиус: не известен
- Failsafe: не известно
- Телеметрия: не известно
- Вес: не известен
- Размеры: не известны
- Совместимые передатчики: все с протоколом AFHDS 2A
Страница с описанием.
Flysky fs-rx2a
Купить на
FS-RX2A можно рассматривать как обновление A8S, и на данный момент это один самых мелких приемников от FlySky. Его вес 1 грамм, размер 12 на 15 мм, это действительно микроприёмник. Судя по характеристикам у него наибольший радиус приема, но учитывая простенькую антенну, на большое расстояние вы летаете на свой страх и риск!
- Протоколы: iBUS, PPM
- Радиус: 400 метров
- Failsafe: есть при использовании iBUS, отсутствует при работе в режиме PPM
- Телеметрия: нет
- Предназначен для моделей размером до 130 мм
- Вес: 1,0 грамм
Учтите Failsafe работает только для протокола iBUS.
Flysky fs-rx2a pro v1
Купить на:
Это обновленная версия RX2A с увеличенным радиусом приема. Антенна с разъемом IPEX. Есть Failsafe при использовании iBus.
- Протоколы: iBUS, PPM
- Радиус: 500 метров
- Failsafe: есть при использовании iBUS, отсутствует при работе в режиме PPM
- Телеметрия: нет
- Предназначен для моделей размером до 130 мм
- Вес: 0,9 грамм
Fs82 micro
Купить на:
Еще один мелкий и легкий приемник с поддержкой протокола AFHDS2. Телеметрии нет, но есть поддержка как PPM, так и iBUS. Совместим с популярными аппами типа Turnigy Evolution, FlySky i6S и т.д. Есть failsafe для протокола iBUS.
- Протоколы: iBUS, PPM
- Радиус: 300 метров
- Failsafe: есть при использовании iBUS, отсутствует при работе в режиме PPM
- Телеметрия: нет
- Предназначен для моделей размером до 130 мм
- Вес: 1,2 грамма
Fs-ft18 paladin
Paladin — это новая аппа премиум серии Flysky. У нее такой же функционал как у Нирваны, но более традиционный корпус. Есть поддержка новейшего протокола AFHDS 3.
Купить:
Fs-th9x
Купить на:
Я решил упомянуть довольно старую аппаратуру FS-TH9X, т.к. она может работать под управлением прошивки OpenTX.
OpenTX — это проект прошивки с открытым исходным кодом, это очень мощная и функциональная прошивка для передатчиков. Она позволяет выбирать отображаемую информацию, а также расширение функционала при помощи LUA скриптов.
К сожалению, TH9X использует старый протокол AFHDS, и не совместима с AFHDS 2A, следовательно, она не поддерживает iBUS и телеметрию. Эта модель уже фактически устарела.
Заметка: серия FS-i не поддерживает прошивку OpenTX
Moy rxa2-10
Приемник с автобиндом к передатчику — при включении он всегда пытается автоматически привязаться к передатчику.
- Протоколы: PPM (10 каналов), SBUS (10 каналов)
- Радиус: 100 метров
- Failsafe: есть
- Телеметрия: нет
- Вес: 2 грамма
- Размеры: 12 х 18 мм
- Совместимые передатчики: FS-i4, FS-i6, FS-i6S, FS-i6X, FS-i10
Купить на: Amazon, AliExpress
Nv14 – nirvana
Nirvana NV14 — это совместная разработка Flysky и UndergroundFPV (UFPV). Новейшая модель в линейке передатчиков Flysky, сделана в виде геймпада и имеет цветной сенсорный экран. Поддерживаются внешние радиомодули стандарта JR, есть совместимость с модулями TBS Crossfire и Frsky R9M.
Подробнее в обзоре (англ).
Купить:
Tl;dr… для тех кто не осилил весь текст: первое место flysky i6x
Выше я описал самое лучшее из того, что FlySky предлагает нам для управления мини- и микрокоптерами, у каждого из них есть свои плюсы и минусы.
С другой стороны, я должен сказать, что из всех передатчиков FlySky что я видел, FlySky i6X единственный вариант, который бы я взял для управления коптером. FS-i6X — стоит не много, имеет 10 каналов, и поддерживает оба протокола: AFHDS и AFHDS-2A. Он совместим с приемниками у которых есть протоколы iBUS/SBUS, а также с более старыми моделями с PWM и PPM.
Аппаратура легкая и прочная, проста в работе, дает весь необходимый функционал (миксы, v-tail и т.д.) для большинства существующих моделей. FS-i6X возможно не идеальная аппаратура, но она стоит своих денег, и неплохо послужит новичкам, прежде чем им понадобится что-то более крутое.
На второе место я бы поставил Turnigy Evolution и Flysky i6S — это тоже довольно хороший выбор, если конечно вам не важно отсутствие кнопок тримметров и отсутствие поддержки старых приемников с протоколом AFHDS.
Turnigy evolution
Купить на
Turnigy Evo — это не Flysky, но мы хотим включить и эту аппаратуру в наш список, т.к. она поддерживает тот же протокол, что и передатчики Flysky и совместима с их приемниками.
Это бюджетная аппаратура, очень легкая и компактная. Сделана в форме игровых контроллеров и это очень удобно для тех, кто управляет только большими пальцами; для тех, кто привык брать стик щипком (большим и указательным пальцами) аппа может быть не очень удобной.
Turnigy Evo — можно использовать в симуляторе, она поддерживает приемники с PPM, SBUS, iBUS, что очень удобно для миникоптеров.
Turnigy ia6c
Купить на Amazon | Hobbyking
Turnigy iA6C поддерживает AFHDS2A, и имеет две антенны. Это легкий приемник с поддержкой разных протоколов, отличный вариант для миникоптеров.
- Протоколы: PPM, iBUS, SBUS
- Радиус: 300 метров
- Failsafe: есть
- Телеметрия: есть
- Предназначен для моделей размером от 140 мм
- Вес: 7,9 грамм
X-boss rx2a pro
- Протоколы: SBUS
- Радиус: 500 метров
- Failsafe: не известно
- Телеметрия: нет
- Вес: 0,9 грамма
- Размеры: 12 х 10 мм
Купить на Banggood
Если ли аппаратура лучше, чем flysky i6x?
i6X стоит всего $50, что очень дешево с учетом имеющегося функционала, но, если вы готовы потратить на $50 больше, тогда лучше купить FrSky Taranis QX7 (за $100, вот обзор).
Для этого есть несколько причин:
Я хотел бы, чтобы у FlySky была поддержка OpenTX, это дало бы больше свободы в настройках. Еще одна офигенно полезная вещь, которой нет у FlySky и есть у FrSky Taranis — это LUA скрипты, которые позволяют пилоту менять PID коэффициенты, рейты, и даже параметры видеопередатчика, прямо с пульта управления.
Автор этой статьи Том Оллпорт (Tom Allport aka Tom BD Bad на форуме IntoFPV)
Зачем покупать аппу и приемники flysky?
Фирма FlySky производит несколько очень доступных (по цене) передатчиков. Ценовой диапазон для тех, кому не понять на сколько захватывающими бывают FPV полеты… Пардон, я имел в виду людей, которые просто хотят «попробовать» и которым не нужны все свистелки и перделки имеющиеся в более дорогих устройствах.
Это руководство предназначено для того, что показать какие из доступных вариантов следует избегать, и отметить те вещи, в которых новичкам легко запутаться.
В этой статье мы рассмотрим:
История изменений
- Ноябрь 2023 — первая версия статьи
- Февраль 2023 — добавлено 2 новых передатчика и 5 приемников
Как и чем управлять
Нормальные люди берут приемник, втыкают в него сервомашинки, регулятор скорости, двигают рычажки на пульте и радуются жизни не задаваясь принципами работы и не углубляясь в подробности. В нашем случае такое не пройдет. Первой задачей стало узнать каким макаром управляются сервомашинки.
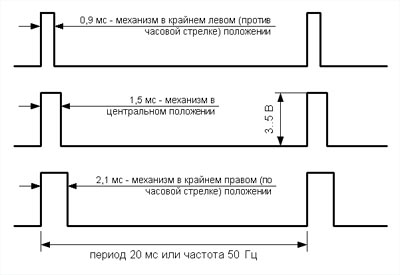
Итак, если мы хотим установить привод в крайнее левое положение нужно слать импульсы длительностью 0,9мс с интервалом 20мс, если в крайнее правое — длительность 2,1мс, интервал тот же, ну со средними положениями аналогично. Как оказалось, регуляторы скорости управляются аналогично. Те, кто в теме скажут что это
, который реализовать на любом микроконтроллере — плевое дело. Вот и я так решил, купил в местном магазине сервомашинку и склепал на макетке для нее так называемый сервотестер на ATtiny13. И тут оказалось, что ШИМ не совсем простой, а с подводными камнями.
Как видно из вышеприведенной диаграммы, скважность (отношение длительности импульса к длительности периода) от 5% до 10% (в дальнейшем я за крайние положения принимаю импульсы длительностью 1,0мс и 2,0мс) для 256-значного ШИМ счетчика ATtiny13 это соответствует значениям от 25 до 50.
Но это при условии, что на заполнение счетчика уйдет 20мс, а на деле так не получится и для частоты 9,6МГц и предделителя 1024 нужно ограничить счетчик значением 187(ТОР), в таком случае у нас получится частота 50,134Гц. В большинстве (если не во всех) сервомашинок нету точного генератора опорной частоты и поэтому частота управляющего сигнала может немного плавать.
Если оставить ТОР счетчика 255, то частота управляющего сигнала будет 36,76Гц — на некоторых приводах оно будет работать (возможно с глюками), но далеко не на всех. Итак, теперь у нас 187-значный счетчик, для него 5-10% соответствуют значениям от 10 до 20 — всего 10 значений, немного дискретно получится. Если думаете поиграть с тактовой частотой и предделителем ниже привожу сравнительную табличку для 8-битного ШИМа:
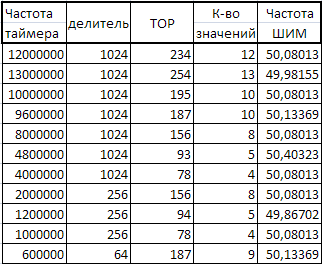

Я не думаю, что для китайской сервомашинки есть существенная разница в 600 и 1200 значений, поэтому вопрос с точностью позиционирования можно считать закрытым.
Передатчик
Почти все RF-модули представляют собой небольшую печатную плату с контактами для подключения питания, передчи данных и управляющих сигналов. Рассмотрим передатчик(трансмиттер) HM-T868

На нем имеется трехконтактный разъем: GND(общий), DATA(данные), VCC( питания), а также пятачок для припайки антенны(я использовал огрызок провода МГТФ на 8,5см — 1/4 длинны волны).
Передающая часть
Самолетная часть есть, осталось разобраться с наземной аппаратурой. Как уже писалось ранее, данные передаются по UART, на каждый канал по одному байту. Вначале подключал свою систему проводом через
к компьютеру и команды слал через терминал. Чтобы дешифратор определял начало посылки, а в будущем выделял посылки адресуемые именно ему, вначале шлется байт-идентификатор, затем 8 байт определяющих состояние каналов. Позже стал использовать радиомодули, при отключении передатчика все моторчики начинали дико дергаться.
Дабы отфильтровать сигнал от шумов, десятым байтом шлю XOR всех 9 предыдущих байт. Помогло, но слабо, добавил еще проверку на таймаут между байтами, если он превышается — вся посылка игнорится и прием начинается заново, с ожидания байта-идентификатора.

Число в нижнем левом углу — контрольная сумма. Передвигая ползунки на компе двигались рули на самолете! Вообщем отладил я все это и стал думать о пульте ДУ, купил для него вот такие джойстики:

Но потом меня посетила одна мысль. В свое время я тащился от всяких авиасимуляторов: «Ил-2 Штурмовик», «Lock On», «MSFSX», «Ка-50 Черная Акула» и др. Соответственно был у меня джойстик Genius F-23 и решил я прикрутить его к вышеописанной проге с ползунками. Погуглил как это реализовать, нашел этот
и получилось! Управлять самолетиком с помощью полноценного джойстика, мне кажется, гораздо круче, чем маленькой палочкой на пульте. Вообщем все вместе изображено на первой фотке — это нетбук, джойстик, преобразователь на FT232, и подключенный к нему передатчик HM-T868.
Последовательные протоколы
Аппаратура радиоуправления: PWM, PPM, SBus, DSM2, DSMX, SUMD
Опубликовано: 08.05.2023 в 13:11 Автор: rider / 2 Comments
При выборе приемника и передатчика аппаратуры радиоуправления, часто возникают проблемы с аббревиатурами: PWM, PPM, SBUS, DSMX и т.д. Это различные протоколы и технологии применяемые для радиоуправления. Далее мы рассмотрим их различия и как эти технологии делают управление более безопасным и надежным.
PWM
Это наиболее распространенный выходной сигнал приемника. До широкого распространения квадрокоптеров, преимники применялись в радиоуправляемых самолетах для управления сервами или ESC с помощью стандартного PWM (ШИМ) сигнала (один канал — одна серва). Сейчас эта технология все еще используется. Мультикоптеры требуют минимум 4-5 каналов (иногда больше) и вы увидите такое же количество проводников между приемником и полетным контроллером.
PWM радиопремник — это наиболее распространенный и обычно самый дешевый вариант.

PWM основан на изменении ширины импульса, изменение ширины импульса приводит к изменению положения сервы или изменению скорости вращения двигателя. Длительность импульса колеблется от 1000 до 2000 мкс.
PPM
PPM также известен, как PPMSUM или CPPM. Преимуществом PPM является, то что только один сигнальный кабель используется для нескольких каналов (обычно максимум 8). Таким образом вам нужно будет подключить только землю, плюс питания и сигнальный кабель.

В общем случае PPM сигнал — это последовательность PWM сигналов один за другим по одному кабелю, но с различной модуляцией. Каналы посылаются один за другим в разное время. Хотя такой способ передачи не такой точный и помехозащищенный, как последовательный обмен данных, он получил широкое распространение и поддерживается многими полетными контроллерами.
PCM
PCM — основан на передачи кода путем импульсной модуляции, данные похожи на PPM. Однако PCM сигнал цифровой (нули и единицы). Теоретически PCM сигнал может определять ошибки при передаче и даже их корректировать. Но эта возможность все еще поддерживается не всеми продуктами.
PCM более надежен и подвержен помехам, но требуется дополнительное оборудование для цифро-аналогового преобразования. Поэтому аппаратура радиоуправления получается более дорогой. PPM — все основное направление в RC аппаратуре в настоящий момент.
Последовательные протоколы
Последовательный приемник — это цифровой последовательный протокол с контролем передачи, который использует 3 проводника ( земля, плюс, сигнал). Для его работы необходим последовательный порт на полетном контроллере. К последовательным протоколам применяется в SBUS, XBUS, MSP, IBUS и SUMD.
Приемник
Ресивер HM-R868, внешне, очень похож на соответствующий ему трансмиттер

но на его разъеме есть четвертый контакт — ENABLE, при подаче на него питания приемник начинает работать.
Приёмники flysky
Приёмники — это та ниша, в которой бы Flysky выиграла, если бы добавила несколько новых устройств; FlySky отстает от лидеров рынка, которые производят полнофункциональные микроприемники.
В нашем хобби мы постоянно ищем компромиссы: «обороты мотора» против «размер винта» или «вес аккумулятора» против «полетное время», тоже самое в случае с приемниками FlySky, вам нужно «балансировать» чтобы найти приемник с необходимыми вам характеристиками…
В старых моделях приемников FlySky именование начиналось с «iA», эти приемники были относительно крупными и тяжелыми, от 15 до 20 грамм! Т.к. экономия веса критически важна для миникоптеров в этом разделе мы сфокусируемся только на легких вариантах.
Все указанные ниже приёмники работают с протоколом AFHDS 2A и, следовательно, не совместимы с FS-TH9X.
Пример №1 — управляем светодиодами
. Пример по сути представляет собой реализацию радиореле на 4 канала: передатчик последовательно передает 8 различных команд (4 на включение и 4 на выключение) с интервалом по 0.5 секунды между ними, приемник принимает и зажигает/гасит светодиоды, которых у него 4.
Схема приемника:
Для тестов я собрал его из подручных материалов на обрезке макетки:

Для увеличения дальности следует припаять к приемнику обрезок провода длиной 17.3 см. Скомпилированный с оптимизацией по размеру пример приемника занимает 636 байт (62% памяти микроконтроллера), причем довольно много весит сама логика проверки сообщений. Тем не менее, еще остается достаточно места на добавление каких-либо действий.Схема передатчика:
В качестве антенны — такой же кусок провода:

Пример работы:
Передатчик весит заметно скромнее — всего 286 байт (28%), что дает пространство для маневра и добавления целой кучи своей логики. Дальность уверенной связи — около 20 метров по прямой или в пределах одной комнаты, в первую очередь из-за шумности приемника. Кроме того, как выяснилось, приемник работает нормально только в узком диапазоне напряжений питания (4-5В), в остальных случаях безбожно шумит и не может обеспечить нормальный сигнал на выходе даже при передаче «в упор».
Библиотека совместима с некоторыми другими микроконтроллерами из серии ATtiny, один из них — ATtiny85, который известен тем, что используется в Arduino-совместимой плате Digispark. Это сильно упрощает эксперименты, потому что его можно прошить через обычный USB порт из Arduino IDE без всяких программаторов.
Я портировал пример мигания светодиодами в скетч для заливки в Digispark с той лишь разницей, что вместо управления 4-мя внешними диодами в нем переключается только 1 светодиод, встроенный в Digispark (висит на пине PB1). Важно отметить, что в скетчах не нужно указывать частоту в F_CPU, потому что Arduino IDE подставляет ее сама при компиляции.
Схема приемника и передатчика:
Пример работы:
В приведенном примере представлен простой и немного избыточный, но действенный способ проверки целостности коротких сообщений. Фактически размер команды — 1 байт, вторым байтом в сообщении отправляется инвертированное значение первого:
{ 11, (uint8_t) ~11 }Приемник предварительно проверяет корректность полученной команды, пытаясь сравнить на равенство:
if (data_buffer[0] == (uint8_t)(~data_buffer[1])) {...}В случае ошибок при приеме равенство не выполняется, и команда игнорируется. Такой способ проверки достаточно надежен, я поэкспериментировал и не заметил ложных срабатываний в течение нескольких дней непрерывной работы, но в реальных ответственных сценариях использования стоит усилить защиту дополнительными проверками.
Пример №2 — приемник и передатчик в одном флаконе
. Библиотека довольно компактная и построена таким образом, что использует одни и те же настройки таймера как для приема, так и для передачи сообщений, плюс на время передачи сообщений прерывания по портам отключаются. Благодаря этому коды приема и передачи сообщений можно уместить на одном микроконтроллере, главное подключить приемник и передатчик к разным пинам. Следующий пример демонстрирует простейший эхо-репитер и работает следующим образом:
Схема:

Скомпилированный код весит всего 576 байт (56% памяти ATtiny13), что даже меньше, чем в примере управления светодиодами. Как вы догадываетесь, с помощью этого репитера можно увеличить дальность работы предыдущего примера, если разместить его между приемником и передатчиком (предварительно уменьшив время задержки до 250-500 мс).
Версия для Digispark:
Чтобы сделать пример более осязаемым предлагаю на примере скетча для Digispark немного видоизменить код повторителя, сделав из него «инвертор»: при получении команды на включение светодиода (11, 22, 33, 44) он будет с задержкой 250 мс передавать в эфир обратную ей команду на выключение (55, 66, 77, 88):
#define TRF_RX_PIN PB0 // Приемник на PB0
#define TRF_TX_PIN PB1 // Передатчик на PB1
#define TRF_DATA_SIZE 2 // 2-байтовая команда
#include "tinyrf.h"
#include <util/delay.h>
// Команды включения
byte commands[4] = {11, 22, 33, 44};
// Обратные команды выключения
byte inv_commands[4][TRF_DATA_SIZE] = {
{ 55, (byte) ~55 },
{ 66, (byte) ~66 },
{ 77, (byte) ~77 },
{ 88, (byte) ~88 }
};
void setup() {
trf_init();
}
void loop() {
// Получена новая команда
if (trf_has_received_data()) {
// Извлекаем данные
byte data[TRF_DATA_SIZE];
trf_get_received_data(data);
// Проверяем корректность
if (data[0] == (byte)(~data[1])) {
// Ищем обратную команду и отправляем
for (byte i = 0; i < 4; i ) {
if (commands[i] == data[0]) {
_delay_ms(250);
trf_send(inv_commands[i]);
}
}
}
// Разрешаем прием следующей команды
trf_reset_received();
}
}
И если раньше переключение светодиодов происходило так:
То со включенным находящимся рядом «инвертирующим повторителем» оно происходит так:
Т.е. повторитель принимает «включающие» команды одновременно с основным приемником и с небольшой задержкой перебивает их своими «выключающими».
Примеры использования
От примеров теоретических предлагаю перейти к примерам практическим. В первую очередь помимо микроконтроллеров нам понадобятся передатчики и приемники, я взял самые дешевые на 433.92 МГц:

Купить сразу пару можно
. Это самые примитивные и дешевые модули, поэтому ждать от них каких-либо выдающихся характеристик не приходится, но для демонстрации вполне сгодятся.
Программная реализация
Благодаря своей примитивности метод кодирования/декодирования легко реализуется программно и занимает очень мало места. Настолько мало, что код приемника и передатчика можно уместить в ATtiny13 с 1024 байтами памяти, и еще останется место для какой-нибудь полезной работы (!) Я не буду подробно расписывать код, он довольно короткий и хорошо задокументирован. Исходники и примеры доступны
и распространяются под MIT лицензией. Как вы догадываетесь, вся библиотека — это один лишь заголовочный файл
Процесс отправки и приема сообщений завязан на аппаратном таймере (у ATtiny13 он один единственный), вычисление настроек таймера выполняется на этапе компиляции с учетом тактовой частоты микроконтроллера, поэтому в проекте обязательно должна быть объявлена директива F_CPU с указанием тактовой частоты в герцах (например, 1.
Таймер (а точнее тактовый генератор) у ATtiny может быть очень кривым, поэтому при каких-либо проблемах с приемом/передачей в первую очередь необходимо попробовать подкрутить F_CPU, а в идеале — откалибровать генератор. С этим я столкнулся, когда проверял правильность отсчета времени таймером. Так по мнению ATtiny13, работающего на частоте 4.8МГц, выглядит меандр с шириной импульса 350 микросекунд:
Поначалу я грешил на вычислительные затраты, но при понижении до частоты 1.2 МГц ситуация наоборот улучшилась:
Разгадка оказалась проста — у многих версий ATtiny13 внутри стоят 2 разных тактовых генератора: на 9.6 МГц и 4.8 МГц, причем первый более-менее откалиброван с завода, а второй — как получится. Частоты 1.2 МГц и 0.6 МГц соответственно получаются с помощью деления на 8, поэтому погрешности сохраняются. Тем не менее, как показали эксперименты, разница в 50мкс оказалась несущественной, поэтому прием/передача практически всегда работают нормально без лишних калибровок и настроек.
Обобщенный пример передачи сообщений:
// Шаг 1: задаем параметры
#define F_CPU 1200000UL // Тактовая частота МК в Гц
#define TRF_TX_PIN PB1 // Пин, к которому подключен передатчик (если не указано - используется PB0)
#define TRF_DATA_SIZE 2 // Размер сообщения в байтах (если не указано - используются 3 байта)
#define TRF_RX_DISABLED // Исключить код приемника для экономии места
// Шаг 2: подключаем библиотеку
#include "tinyrf.h"
// Шаг 3: вызываем инициализацию
// Если ваш код не меняет настройки прерываний и таймера, то вызвать инициализацию можно один раз при запуске
// иначе следует вызывать инициализацию каждый раз перед тем, как хотим отправить сообщение
trf_init();
// Шаг 4: готовим сообщение и отправляем его
uint8_t message[TRF_DATA_SIZE] = { 123, 234 };
trf_send(message);
Обобщенный пример приема сообщений:
// Шаг 1: задаем параметры
#define F_CPU 1200000UL // Тактовая частота МК в Гц
#define TRF_RX_PIN PB0 // Пин, к которому подключен приемник (если не указано - используется PB1)
#define TRF_DATA_SIZE 2 // Размер сообщения в байтах (если не указано - используются 3 байта)
#define TRF_TX_DISABLED // Исключить код передатчика для экономии места
// Шаг 2: подключаем библиотеку
#include "tinyrf.h"
// Шаг 3: вызываем инициализацию
// Если ваш код не меняет настройки прерываний и таймера, то вызвать инициализацию можно один раз при запуске
// иначе следует вызывать инициализацию каждый раз перед тем, как хотим начать принимать сообщения
trf_init();
// Шаг 4: проверка наличия нового сообщения
if (trf_has_received_data()) {
// Шаг 5: подготовка буфера и чтение в него сообщения
uint8_t data_buffer[TRF_DATA_SIZE];
trf_get_received_data(data_buffer);
// Шаг 6: проверка корректности полученного сообщения и выполнение требуемых действий
if (data_buffer[0] == 123 && data_buffer[1] == 234) {
...
}
// Шаг 7: сброс флага наличия сообщения для приема следующего
trf_reset_received();
}
Как видно, некоторые параметры можно конфигурировать с помощью директив, можно даже частично перенастроить сам протокол. Полный список доступных директив можно найти здесь
Протоколы передатчиков flysky
Есть два разных протокола:
AFHDS расшифровывается как Automatic Frequency Hopping Digital System (цифровая система с автоматической перестройкой рабочей частоты), это цифровой протокол передачи данных, благодаря ему на одной частоте может работать 2 или больше передатчиков без взаимного влияния друг на друга.
AFHDS 2A — это второе поколение системы, в ней добавлена двусторонняя связь, т.е. телеметрия.
Протоколы приемников flysky
Помимо старых аналоговых протоколов PWM и PPM, в новых приемниках Flysky поддерживается протокол iBUS.
Как и SBUS, iBUS — это цифровой протокол, который позволяет передавать до 18 каналов данных по одному проводу (до 16 каналов у SBUS). Этот цифровой протокол имеет меньшую задержку сигнала, чем PPM, в целом это лучше, чем традиционные аналоговые сигналы.
Ещё одно преимущество iBUS над SBUS в том, что сигнал не инвертирован, так что вам не потребуется дополнительный инвертор для ПК на процессорах серий F1 и F4 (как это требуется для SBUS).
Замечу, что микроприёмники вообще не поддерживают PWM сигнал, т.к. в них недостаточно места для контактов и разъемов.
Пуск!
Итак, есть самолетик, есть радиоуправление — Поехали!(с) Первый полет производился над асфальтом, результат — сломанный пополам фюзеляж и полувырванный двигатель. Второй полет производился над более мягкой поверхностью:
Последующие полетов 10 были тоже не особо удачными. Основной причиной я считаю сильную дискретность джойстика — по крену он выдавал только 16 значений (вместо возможных 256), с осью тангажа — не лучше. Но так как в результате испытаний самолет был значительно поврежден и не подлежит ремонту:

Работа
Судя по документации, рабочим напряжением является 2,5-5В, чем выше напряжение, тем большая дальность работы. По сути дела — это радиоудлинитель: при подаче напряжения на вход DATA передатчика, на выходе DATA приемника так же появится напряжение (при условии что на ENABLE также будет подано напряжение).
НО, есть несколько нюансов. Во-первых: частота передачи данных (в нашем случае — это 600-4800 бит/с). Во-вторых: если на входе DATA нету сигнала более чем 70мс, то передатчик переходит в спящий режим(по-сути отключается). В-третьих: если в зоне приема ресивера нету работающего передатчика — на его выходе появляется всякий шум.
Проведем небольшой эксперимент: к контактам GND и VCC трансмиттера подключим питание. Вывод DATA соединим с VCC через кнопку или джампер. К контактам GND и VCC ресивера также подключаем питание, ENABLE и VCC замыкаем между собой. К выходу DATA подключаем светодиод (крайне желательно через резистор). В качестве антенн используем любой подходящий провод длинной в 1/4 длинны волны. Должна получиться такая схемка:
Сразу после включения приемника и/или подачи напряжения на ENABLE должен загореться светодиод и гореть непрерывно (ну или почти непрерывно). После нажатии кнопки на передатчике, со светодиодом также ничего не происходит — он продолжает гореть и дальше. При отпускании кнопки светодиод мигнет(погаснет и снова загорится) и продолжает гореть дальше. При повторном нажатии и отпускании кнопки все должно повторится. Что же там происходило? Во время включения приемника, передатчик находился в спящем состоянии, приемник не нашел нормального сигнала и стал принимать всякий шум, соответственно и на выходе появилась всякая бяка. На глаз отличить непрерывный сигнал от шума нереально, и кажется, что светодиод светит непрерывно. После нажатия кнопки трансмиттер выходит из спячки и начинает передачу, на выходе ресивера появляется логическая «1» и светодиод светит уже действительно непрерывно. После отпускания кнопки передатчик передает логический «0», который принимается приемником и на его выходе также возникает «0» — светодиод, наконец, гаснет. Но спустя 70мс передатчик видит что на его входе все тот же «0» и уходит в сон, генератор несущей частоты отключается и приемник начинает принимать всякие шумы, на выходе шум — светодиод опять загорается.
Из вышесказанного следует, что если на входе трансмиттера сигнал будет отсутствовать менее 70мс и находится в правильном диапазоне частот, то модули будут вести себя как обычный провод (на помехи и другие сигналы мы пока не обращаем внимания).
Реализация в железе
Ну с теорией разобрались, пришло время все это реализовать. Мозгом системы выбран микроконтроллер ATmega8A, тактируется от кварца на 16МГц (не потому, что я захотел 16000 позиций сервомашинки, а потому, что у меня такие валялись). Управляющий сигнал для МК будет поступать через UART. В результате получилась вот такая схемка:
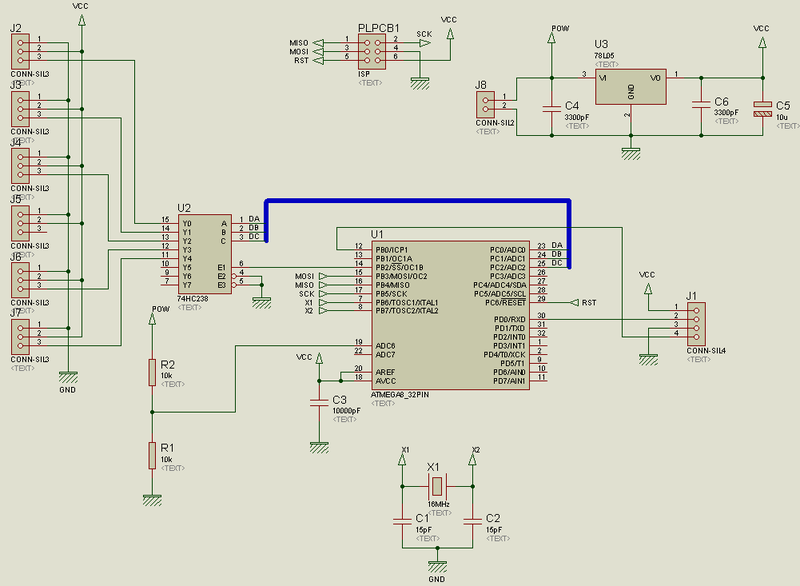
Спустя некоторое время появилась вот такая платка:
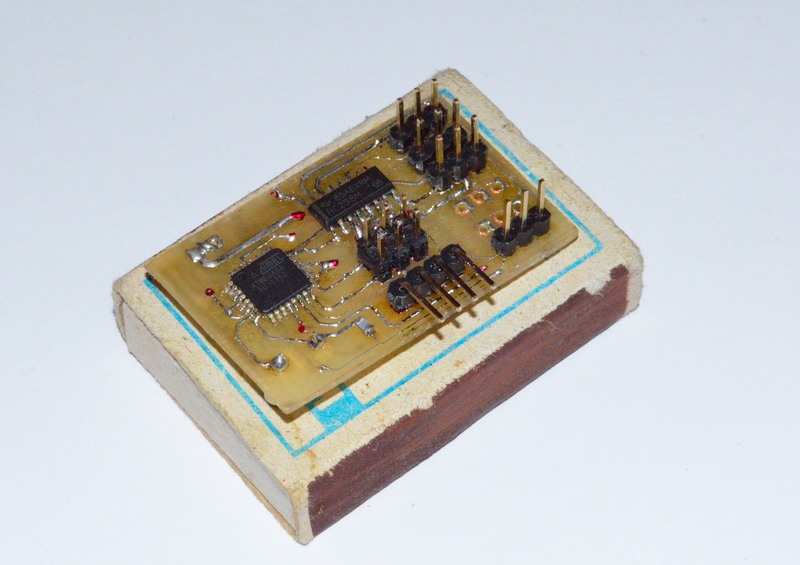
Два трехштыревых разъема я не припаял потому, что они мне не нужны, а не подряд они впаяны поскольку у меня нету металлизации отверстий, а в нижнем разъеме дорожки с двух сторон, можно было бы заменить проволочкой, но программно нету проблемы выводить сигнал на любой разъем. Также отсутствует 78L05 ибо в моем регуляторе двигателя есть встроенный стабилизатор (ВЕС).
Для получения данных к плате подключается
HM-R868:
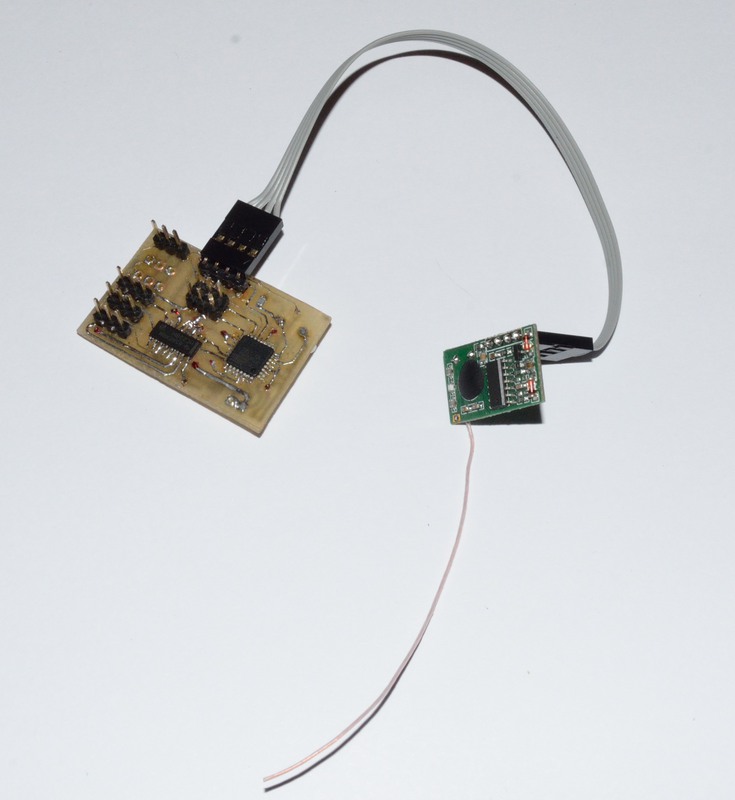
Изначально думал втыкать его прямо в плату, но эта конструкция не помещалась в самолетик, пришлось сделать через шлейф. Если изменить прошивку, то контакты разъема для программирования можно использовать для включения/отключения каких-нибудь системам (бортовые огни и т.п.)
Плата обошлась примерно в 20грн = $2.50, приемник — 30грн = $3,75.
Сколько нужно каналов управления?
У FlySky есть 4-х канальные передатчики, в то время как для простых радиоуправляемых машинок, лодок, самолетов достаточно 4 канала, нам, для коптеров, нужно не менее 6.
Каналы с 1 по 4 используются собственно для маневрирования, остальные нужны для переключателей и крутилок, мы из называем дополнительными каналами (Auxiliary Channels), в программах их часто обозначают как AUX1, AUX2 и т.д.
Доп. каналы можно использовать для включения разных полетных режимов, управления периферией на коптере, например, пищалкой для поиска модели, светодиодами. С развитием новых технологий всё время появляются новые функции и устройства, которыми можно управлять с передатчика.
На самом деле вы достаточно быстро увидите, что 6 каналов начинают вас ограничивать, поэтому в список ниже мы включили аппаратуру минимум в 6 каналами.
Список моделей передатчиков от flysky
Мы выбрали несколько передатчиков Flysky, те, что имеют «i» в названии — это более новые модели, число за буквой указывает число поддерживаемых PWM каналов.
- FS-TH9X
- FS-i6
- FS-i6S
- FS-i6X
- FS-i8
- FS-i10
Телеметрия
Я думаю, что телеметрия от FlySky несколько запоздала, сейчас, когда у большинства полетных контроллеров есть встроенное OSD, кто может обвинить их в том, что они сфокусировались на рынке FPV оборудования? На самом деле телеметрию можно рассматривать как одну из «свистелок и перделок», т.е. вещь которая новичкам не нужна.
Технические детали: протоколы в передатчиках и приемниках flysky
Разные передатчики и приёмники используют разные протоколы. В этой части мы покажем вам основные протоколы, используемые в передатчиках и приёмниках фирмы Flysky.
Вы должны знать, что есть 2 группы протоколов:
- Протоколы в передатчиках (TX) — «язык» на котором общаются приёмник и передатчик
- Протоколы в приемниках (RX) — «язык» на котором общаются приёмник и полетный контроллер
Вот полезная информация о разных протоколах в передатчиках и приемниках.
Типы модулей
RF-модули для передачи данных работают в диапазоне УКВ и используют стандартные частоты 433МГц, 868МГц либо 2,4ГГц (реже 315МГц, 450МГц, 490МГц, 915МГц и др.) Чем выше несущая частота, тем с большей скоростью можно передавать информацию.
Как правило, выпускаемые RF-модули предназначены для работы с каким-либо протоколом передачи данных. Чаще всего это UART (RS-232) или SPI. Обычно UART модули стоят дешевле, а так же позволяют использовать нестандартные (пользовательские) протоколы передачи. Вначале я думал склепать что-то типа
, но вспомнив свой горький опыт изготовления аппаратуры радиоуправления выбрал достаточно дешевые HM-T868 и HM-R868 (60грн. = менее $8 комплект). Существуют также модели HM-*315 и HM-*433 отличающиеся от нижеописанных лишь несущей частотой (315МГц и 433МГц соответственно).


, цена 4600 руб")




