
 | RCDetails Blog")
- Что такое приложение dji go?
- Главный экран полёта
- Aircraft status
- Compass
- Важные замечания:
- Remote controller mode
- Main controller settings
- Home point settings
- Доступно два варианта:
- Multiple flight modes
- К сведению
- Return to home altitude
- К сведению
- Beginner mode
- Max flight altitude
- Max distance
- Advanced settings
- Gain & expo tuning
- Gain & expo tuning: exp
- Gain & expo tuning: sensitivity
- Gain & expo tuning: gain
- Sensors: imu
- К сведению
- Sensors: compass
- Remote controller signal lost
- К сведению
- Turn on front leds
- Stop motor method
- К сведению
- Visual navigation settings
- Enable obstacle avoidance
- К сведению
- Enable horizontal obstacle avoidance in tapfly
- Enable backward flying
- Enable obstacle avoidance in activetrack
- Display radar chart
- Advanced settings
- Enable vision positioning
- Landing protection
- Precision landing
- Rth obstacle check (detection)
- Rth remote obstacle avoidance
- Remote controller settings
- Remote controller calibration
- Stick mode
- Button customization
- Linking remote controller
- Image transmission settings
- Aircraft battery
- Critically low battery warning
- Low battery warning
- Smart return-to-home
- Flight time
- Advanced settings
- Show voltage on main screen
- Time to discharge
- Ditails
- Gimbal settings
- Gimbal mode
- Advanced settings
- Adjust gimbal roll
- Gimbal auto calibration
- General settings
- Units
- Camera
- Enable hardware decoding
- К сведению
- Peak focus threshold
- Long press action
- 2 Оптимальное управление
- Iris
Что такое приложение dji go?
Приложение DJI Go это программное обеспечение позволяющее подключить планшет/смартфон к пульту дистанционного управления указанных выше DJI дронов, чтобы в последствии реализовать их максимальный потенциал. Как только приложение будет запущено, вы сможете видеть, что видит камера вашего дрона, получите возможность настраивать параметры камеры, просматривать отснятое фото/видео, настраивать управление и динамичность полёта в рамках своих предпочтений, активировать интеллектуальные режимы полёта и съёмки (Intelligent Flight modes) и многое другое. Итак, начнем!
Главный экран полёта
На главном экране поверх отображаемого в онлайн режиме изображения с камеры дрона, располагается вся необходимая для пилота информация на время совершения полёта и съёмки, а также ряд дополнительных виртуальных кнопок/иконок для быстрого доступа к основным настройкам/функциям дрона и управления камерой.

![]()
Aircraft status
Aircraft status (Статус дрона) — именно сюда рекомендуется заходить после визуального предполётного осмотра дрона. Это меню предоставляет обзор работоспособности/состояния каждой подсистемы дрона/пульта управления (текущий полётный режим, состояние сенсоров визуализации, компаса, IMU, АКБ и т.д.). Чтобы войти в это меню, тапните по иконке «Ready to Go» в левой верхней части главного экрана полёта. Если вы видите, что установки вашего дрона отмечены словом «Normal», и не видите ничего, окрашенного в красный цвет, то вероятнее всего это означает, что дрон функционирует нормально и готов к полёту.

Compass
Компас — один из самых важных сенсоров, состояние которого вы должны всегда проверять, поскольку он отвечает за ориентацию дрона в пространстве. Настоятельно рекомендуется всегда калибровать компас дрона в любом новом месте запуска. Это связано с тем, что компас очень чувствителен к электромагнитным помехам, которые могут привести к нарушению работоспособности сенсора, что зачастую, приводит к ухудшению лётных характеристик или даже к отказу в работе. Поэтому регулярная калибровка компаса перед запуском в новом месте, позволит поддерживать оптимальную производительность беспилотника. Чтобы выполнить калибровку компаса, тапните по иконке «Calibrate» и следуйте инструкциям на экране.

Важные замечания:
- Не калибруйте компас вблизи любых сильных источников магнитных помех, таких как магнетит, подземные металлические конструкции, автостоянки.
- Не калибруйте компас рядом с крупными металлическими предметами/объектами.
- Не калибруйте компас в помещении.
Remote controller mode
Remote Controller Mode (Режим Дистанционного Управления) — как правило по умолчанию установлен на «Mode 2». Это означает, что левый стик (джойстик) пульта управления отвечает за взлёт, снижение и вращение дрона вокруг своей оси, а правый стик (джойстик) отвечает за движение вперед, назад и движение влево/вправо. Процедура смены режимов осуществляется разово, и при последующем включении беспилотника не требует повторного изменения.

Main controller settings

Main Controller Settings (Основные Настройки Контроллера) — для входа в меню тапните по иконке в виде трёх точек (…) в верхнем правом углу главного экрана полёта. Затем тапните по иконке в виде дрона (![]() ) в левой части меню. Здесь вы найдёте:
) в левой части меню. Здесь вы найдёте:
- Настройку точки возврата домой «Home Point Settings»
- Включение/смену режимов полёта «Multiple Flight Modes»
- Включение/выключение режима «Beginner mode»
- Установка максимальной высоты (Max Flight Altitude) и расстояния удаления (Max Distance)
- Advanced settings
Далее более подробно о каждой настройке и подменю:
Home point settings
Home Point Settings (Настройки Домашней Точки) — этот пункт настраивает точку возврата домой, т.е. куда дрон должен будет вернуться (в случае: Потери связи между дроном и пультом управления/Недостаточном заряде АКБ/После нажатия кнопки RTH).

Доступно два варианта:
- Иконка со стрелкой = если выбрать этот способ возврата, то точкой возврата будет считаться текущее место взлёта. При нажатии система дрона спросит: «Set current aircraft position as Home Point/Установить эту позицию как точку возврата домой?». Нажмите «OK».
- Иконка с маленьким человечком = если выбрать этот способ возврата, то дрон вернётся к текущему месту нахождения пульта управления. Такой способ актуален, если пилот управляет дроном с движущегося объекта, такого как лодка или машина.
Multiple flight modes

Multiple Flight Modes (Различные Режимы Полёта) — данная настройка позволяет переключаться между тремя возможными режимами полёта:
- P (Positioning) Mode или Режим позиционирования (P Mode) — в этом режиме все сенсоры беспилотника включены, что приведёт к более «заторможенному», но стабильному полёту. В этом режиме, если пилот отпустит стики (джойстики управления) — дрон автоматически затормозит, а затем зависнет и будет удерживать позицию благодаря спутниковому позиционированию GPS/GLONASS.
- S (Sport) Mode или Спорт режим — раскрывает весь потенциал дрона, позволяя ему развивать макс. скорость полёта, при этом спутниковое (GPS/GLONASS) и визуальное позиционирование (комплекс сенсоров в нижней части дрона) остаётся активным. Но имейте в виду, что в этом режиме система определения и обхода препятствий будет отключена!
- A (Attitude/ATTI) Mode — в режиме A-Mode все сенсоры дрона отключены, активен только барометр (применяется для контроля и удержания высоты), что приводит к более нестабильному полёту/дрейфующему зависанию, так как ветер и его воздушные потоки будут оказывать влияние на дрон. Иначе говоря, нет никакого «автоматического тормоза». Чтобы остановить дрон и удерживать его позицию, пилоту будет необходимо самостоятельно контролировать беспилотник перемещением стиков управления.
К сведению
A-Mode актуален для опытных пилотов, например когда:
- Запуск дрона осуществляется в местах с плохим приёмом, либо, где вовсе нет спутникового покрытия
- Для обеспечения плавного маневрирования/торможения при выполнении аэросъёмки
- В качестве отказоустойчивого режима для остановки дрона, если вдруг, что-то пошло не так.
Return to home altitude

Return to Home Altitude (Высота Возврата Домой) — настройка устанавливает высоту на которой дрон исполнит автоматический возврат (в случае: Потери связи между дроном и пультом управления/Недостаточном заряде АКБ/После нажатия кнопки RTH).
Например при потере связи, независимо от того на какой высоте осуществлялся полёт, дрон автоматически перейдёт в режим возврата, выйдет на заданную высоту и лишь затем исполнит автовозврат.
К сведению
- Значение высоты можно установить на 60 метров. В большинстве случаев такая высота намного выше среднестатистических деревьев или зданий. Но в любом случае на каждом новом месте, перед запуском, следует прочекать высоту деревьев, зданий и возможных препятствий и если это требуется изменить текущие настройки «Return to Home Altitude».
Beginner mode

Beginner Mode (Режим Новичка) — рекомендуется активировать, если пользователь впервые пилотирует дроном. На деле, режим отключает многие расширенные функции, а также автоматически ограничивает высоту (до 30 метров), расстояние (до 30 метров) и скорость вашего дрона, поэтому, если вы будете летать на большом открытом пространстве, вам не о чем беспокоиться пилотируя в режиме Beginner. Также режим отлично подходит для тренировок, так как он позволяет плавно переходить от простого и комфортного полёта к более сложным настройкам.
Max flight altitude
Max Flight Altitude (Максимальная Высота Полёта) — посредством этой настройки устанавливается максимальный потолок по высоте на которую дрон сможет подниматься. В скобках указан возможный диапазон в метрах (например 20-500 м). Во многих странах эта высота ограничена законом на уровне 120 метров. Стоит это учитывать перед взлётом и заблаговременно ознакомиться с местным законодательством.

Max distance
Max Distance (Макс. Расстояние) — посредством этой настройки задаётся макс. расстояние на которое дрон сможет удаляться от пульта управления. В скобках указан возможный диапазон в метрах (например 15-500 м). Во многих странах этот параметр также может быть ограничен законом. Например, в США пользователи БЛА обязаны пилотировать дроном в пределах прямой видимости, другими словами, пилотируя, оператор (пилот) должен иметь возможность видеть свой дрон.
Advanced settings
Advanced Settings (Расширенные Настройки) — параметры в этом меню рассчитаны на продвинутого пользователя. Например, здесь можно более точно настроить отзывчивость дрона на перемещение стиков/джойстиков управления (может быть более острой или мягкой). Это можно сравнить с настройкой гитары, где у каждого гитариста свои предпочтения. Далее по каждой настройке отдельно.

Gain & expo tuning
Эти настройки отвечают за то, как быстро снимаемые со стиков данные переводятся в движение на дроне, другими словами регулируют отзывчивость и чувствительность дрона на перемещение стиков пульта управления. Далее по каждой настройке отдельно.

Gain & expo tuning: exp
EXP расшифровывается как Exponential Curve/Экспоненциальная кривая. По Оси X отображается физический выход манипулируемых стиков/джойстиков. По оси Y отображается логический выход манипулируемых стиков/джойстиков. Обе оси напрямую управляют моторами дрона. Настройка отклика моторов на перемещение стиков возможна как для обычных режимов, так и для спортивного режима (иконка над графиками Normal/Sport).

Ввод наименьшего значения, приведёт к увеличению амплитуды перемещения стиков/джойстиков, прежде чем дрон начнёт реагировать (что соответствует более плавному/изящному перемещению дрона, и будут наиболее актуальны для съёмки). Ввод максимального значения, приведёт к мгновенному отклику дрона на малейшее перемещение стиков (что соответствует более агрессивному перемещению дрона, и будут наиболее актуальны для скоростных FPV полётов).
Если режим работы стиков пользователем не изменялся то:
- Кривая «Throttle Up/Throttle down» затрагивает отклик моторов на перемещение левого стика вперед/назад, что соответствует взлёту/снижению дрона.
- Кривая «Rudder Right/Rudder Left» затрагивает отклик моторов на перемещение левого стика вправо/влево, что соответствует вращению дрона вокруг своей оси вправо/влево.
- Кривая «(Forward/Right)/(Backward/Left)» затрагивает отклик моторов на перемещение правого стика (Вперед/Вправо)/(Назад/Влево), что соответствует движению дрона вперед/вправо и назад/влево).
Gain & expo tuning: sensitivity
В этом разделе определяется степень чувствительности элементов управления.

- Attitude = как быстро дрон будет реагировать и выравниваться. Чем меньше установленное значение, тем более медленным/спокойным будет начало движения и выравнивание дрона, и соответственно, чем это значение больше, тем более резким/агрессивным будет начало движения и выравнивание дрона.
- Brake = как быстро дрон остановится в GPS/GLONASS режиме. Чем меньше установленное значение, тем более медленное и плавное торможение дрона, и соответственно, чем это значение больше, тем более острым/резким будет торможение.
- Yaw Movment Limit = как быстро дрон будет вращаться вокруг своей оси. Чем меньше установленное значение, тем более медленным будет вращение дрона.
Gain & expo tuning: gain
Это меню определяет, как дрон будет реагировать на воздействие внешних сил, таких как атмосферное давление и ветер. Корректировка этих настроек изменит динамику полёта, что может привести к нежелательным вибрациям и/или колебаниям. Раздел предназначен для продвинутых пилотов, которые профессионально занимаются постройкой беспилотных летательных аппаратов с нуля. Если вы не знакомы со спецификой настройки данных параметров, настоятельно рекомендуется оставить их без изменения!

Sensors: imu
IMU (Inertial Measurement Unit/Инерционное измерительное устройство) — включает в себя 3-осевой акселерометр, 3-осевой гироскоп и барометрический альтиметр, которые работают в тандеме, чтобы точно удерживать дрон в его текущем положении во время полёта. Иначе говоря, устройство позволяет определять положение беспилотника в пространстве.

К сведению
- Если в процессе эксплуатации дрона наблюдаются проблемы в виде некорректного полёта, дрейфа, либо появляются ошибки в работе компаса, попробуйте исправить их, выполнив калибровку IMU, тапнув по иконке ниже «Calibrate IMU». На текущее состояние IMU указывает цветовая палитра расположенная ниже, где: Зеленый цвет — отлично; Жёлтый цвет — хорошо; Красный — плохо.
Sensors: compass
В этом разделе проверяется наличие проблем в работе компаса или помех. При необходимости вы также можете откалибровать его, тапнув по иконке ниже «Calibrate Compass». На текущее состояние компаса указывает цветовая палитра расположенная ниже, где: Зеленый цвет — отлично; Жёлтый — хорошо; Красный — плохо.

Remote controller signal lost
В этом разделе настраивается так называемая функция «Failsafe», благодаря которой дрон всегда знает, что ему делать, когда между ним и пультом управления пропадает связь.

Доступно три сценария в случае разрыва связи:
- Return-to-Home: в данном случае дрон исполнит возврат в точку взлёта (установлено по умолчанию).
- Landing: в данном случае дрон исполнит посадку в месте разрыва связи.
- Hover: в данном случае дрон зависнет в месте потери связи.
К сведению
- Помните, что потеря сигнала может произойти по разным причинам, например, когда дрон улетает слишком далеко, отсутствует питание пульта управления или когда сигнал блокируется.
- Рекомендуется оставлять настройку выбранную разработчиком по умолчанию: Return-to-Home. А перед взлётом дублировать действия в разделе: Home Point Settings (Настройки домашней точки), тапнув по иконке со стрелкой, подтвердив тем самым текущее место взлёта.
- Исполнение зависания (Hover) рекомендуется выбирать, когда полёт дрона выполняется в помещении.
Turn on front leds
Данная опция включает и отключает передние светодиоды (горят красным цветом). Это может быть полезно, если полёт осуществляется при слабом освещении, поскольку красные огни могут легко попадать в поле зрения камеры.

Stop motor method
Здесь пользователь может активировать возможность экстренной остановки моторов, либо исключить её вовсе (для каждой модели эти способы разнятся).

Для этого доступно два варианта настроек:
- CSC: остановка моторов путём одновременного сведения левого стика управления в правый нижний угол и нажатием на кнопку «RTH/Возврата домой» (данная настройка установлена по умолчанию).
- Do not stop in the air: исключает возможность экстренного отключения моторов пока дрон находится в воздухе.
К сведению
- Экстренная остановка моторов может быть актуальна в различных случаях, например, когда дрон по неосторожности/невнимательности пилота задевает крону дерева, что неминуемо повлечёт за собой неуправляемое падение с последующим застреванием беспилотника в ветках дерева. И чтобы обеспечить сохранность элементов силовой установки будет лучшим оперативно выключить моторы.
Здесь изменяются настройки визуальной навигации дрона. Иначе говоря в этом разделе можно включать и отключать сенсоры отвечающие за визуализацию окружающего мира, в том числе для отдельно взятых авторежимов полёта, которые напрямую взаимодействуют с этими сенсорами. Для перехода тапните по соответствующей иконке в виде «излучаемой точки ![]() » в левой части меню «Main Controller Settings». Далее по каждой настройке отдельно.
» в левой части меню «Main Controller Settings». Далее по каждой настройке отдельно.

Enable obstacle avoidance
Настройка включает и отключает сенсорную систему предотвращения столкновения с препятствиями. Так сказать, общий выключатель. После её отключения дрон перестанет распознавать препятствия. Рекомендуется всегда отставлять активной.

К сведению
Enable horizontal obstacle avoidance in tapfly
Настройка включает и отключает возможность горизонтального избегания препятствий в режиме автополёта TapFly. При активации дрон будет автоматически облетать встречаемые на пути следования препятствия слева или справа от них.

Enable backward flying
Если активировать, то в моменты сближения с отслеживаемым объектом (например, когда объект двигается на встречу дрону) дрон не будет разворачиваться, а будет автоматически лететь задом наперед отслеживая объект. Прежде чем активировать, убедитесь в том, чтобы не было препятствий в направлении полёта.

Enable obstacle avoidance in activetrack
Настройка включает и отключает горизонтальное избегание препятствий в режиме автополёта ActiveTrack. Если отключить, то при обнаружении препятствий в процессе исполнения автополёта дрон замедлится и остановится перед препятствием в ожидании следующих команд от пилота.

Display radar chart
Настройка включает и отключает отображение на главном экране полёта индикаторов приближения к препятствиям.

Advanced settings
Расширенные настройки визуальной системы позиционирования. Далее по каждой настройке отдельно.

Enable vision positioning
Enable Vision Positioning (Включение Визуального Позиционирования) — настройка включает и отключает нижние сенсоры позиционирования (располагаются в нижней части дрона), которые отвечают за обеспечение точного и стабильного зависания, когда спутниковое позиционирование не доступно, а также за работоспособность «Landing Protection» и других систем. При отключении система спросит пользователя «Disable Vision Position?/Отключить визуальное позиционирование?» и предложит подтвердить «OK», либо отменить «Cancel».

Landing protection
Landing Protection (Безопасное Приземление) — когда настройка активна, дрон перед осуществлением приземления будет проверять поверхность на наличие препятствий, и если таковые имеются, на главном экране будет выводится предупреждение о вероятных препятствиях, после чего пилоту нужно будет, либо подтвердить посадку, либо её отменить. При отключении система спросит пользователя: «Disable Landing Protection?/Отключить безопасное приземление?» и предложит подтвердить «OK», либо отменить «Cancel».

Precision landing
Precision Landing (Точное Приземление) — когда настройка включена, дрон во время исполнения автовозврата (RTH) попытается приземлиться в максимальной близости от места взлёта.

Rth obstacle check (detection)
RTH Obstacle Check (Контроль Препятствий при исполнении Return to Home/Возврат Домой) — когда настройка активна, при исполнении автовозврата дрон будет автоматически набирать высоту при обнаружении препятствий, даже если настройка «Obstacle Avoidance/Избегания Препятствий» отключена. При отключении система спросит пользователя: «Disable RTH Obstacle Check?/Отключить контроль препятствий при исполнении RTH?» и предложит подтвердить «OK», либо отменить «Cancel».

Rth remote obstacle avoidance
RTH Remote Obstacle Avoidance (Дистанционное Избегание препятствий при исполнении RTH) — когда настройка активна, дрон будет автоматически корректировать свой маршрут возврата, чтобы избегать препятствия на всём пути следования, при этом подвес не будет реагировать ни на какие команды с пульта управления.

Remote controller settings
Здесь пользователь вносит изменения в настройки пульта управления. Для перехода тапните по соответствующей иконке в виде «пульта ![]() » в левой части меню «Main Controller Settings». Далее подробно по каждой настройке.
» в левой части меню «Main Controller Settings». Далее подробно по каждой настройке.

Remote controller calibration
Если органы управления (стики/джойстики; колёсики управления наклоном/поворотом камеры) работают некорректно/не точно, то в этом меню вы сможете их откалибровать. Процедура производится при выключенном дроне. Для начала процедуры калибровки тапните по иконке «Calibrate», после чего установите стики/джойстики в центральное положение. Далее тапните по иконке «Start» и осуществите перемещение стиков и колёсиков из нулевого положения в крайнее (100%) до того момента пока иконка «Finish» не станет активной. Тапните по иконке «Finish». Калибровка закончена.

Stick mode
В этом меню вы сможете выбрать один из трёх предустановленных режимов работы стиков (джойстиков) управления дроном: Mode 1/Mode 2 (по умолчанию)/ Mode 3.

Также доступна ручная установка работы стиков — «Custom», позволяющая пользователю самому назначить действия дрона для каждого перемещения стиков. Чтобы вручную настроить работу стиков, тапните по разделу «Custom», а затем по иконке «Change settings». Перетащите каждую иконку определяющую направление движения дрона: Up (Вверх)/Down (Вниз)/Left (Влево)/Right (Вправо)/Forward (Вперёд)/Backward (Назад)/Turn left (Вращение влево)/Turn right (Вращение вправо) на ось каждого стика. По завершению расстановки подтвердите установку тапнув по иконке «Save».


Button customization
Как вы могли заметить, на обратной стороне пульта управления есть две кнопки C1/C2. Эти кнопки являются настраиваемыми, иначе говоря пользователь сам решает за что будет отвечать каждая из них. Соответственно это меню позволяет назначить одну из доступных команд этим кнопкам. Чтобы это сделать, выберите из раскрывающегося меню напротив C1/C2 любую предлагаемую команду. По умолчанию обе кнопки открывают расширенные настройки камеры (Advanced Camera Settings), но также можно задать, например, чтобы при нажатии на C1/C2, на экран выводилась вся информация о АКБ (Battery Info), либо можно заставить камеру дрона быстро перейти из горизонтального положения вперёд в вертикальное нижнее и обратно (Camera Forward/Down), изменить режим работы подвеса (Gimbal Follow/FPV mode), вывести на дисплей карту, а затем обратно перейти к режиму от первого лица (Toggle Map/Live View). Поэкспериментируйте с каждым и выберите то, что вам необходимо.

Linking remote controller
Если по какой-либо причине пульт дистанционного управления не может связаться с дроном или пользователь купил новый пульт и его надо связать с дроном, это меню позволит без труда соединить их вместе. Для того чтобы связать/привязать пульт и дрон необходимо включить дрон и пульт, тапнуть по иконке «Linking Remote Controller» и на две секунды нажать на специальную кнопку «привязки» расположенную на борту дрона (расположение кнопки можно найти в руководстве по эксплуатации в разделе «Общий вид коптера»).
Image transmission settings
Для перехода тапните по соответствующей иконке «![]() » в левой части меню «Main Controller Settings». Это меню определяет качество и диапазон видеопередачи. Чтобы обеспечить надёжную передачу видеосигнала (FPV), настройки по умолчанию установлены в режим «Auto» (система сама отслеживает и переключается на свободные для передачи каналы).
» в левой части меню «Main Controller Settings». Это меню определяет качество и диапазон видеопередачи. Чтобы обеспечить надёжную передачу видеосигнала (FPV), настройки по умолчанию установлены в режим «Auto» (система сама отслеживает и переключается на свободные для передачи каналы).

Также в меню доступен ручной выбор свободного канала «Custom». Для ручного выбора канала тапните по иконке «Custom» и выберите наиболее свободный в разделе «Select Channel» (где, исходя из цветовой палитры: Current Chanel – текущий канал; Stable – стабильный канал; Unstable – нестабильный канал). Настройка «Transmission Quality (Качество передачи)» определяет, насколько чётким и чистым будет FPV изображение. Однако имейте в виду, что чем выше качество FPV изображения, тем меньше расстояние, на которое будет распространяться сигнал.

Aircraft battery
Этот раздел затрагивает информацию и настройки установленной в дрон АКБ. Здесь пользователь сможет узнать о текущем состоянии АКБ: напряжении, ёмкости (полная/остаточная), температуре, можете увидеть время полёта на текущем заряде данной АКБ и сколько раз она заряжалась. Для перехода тапните по соответствующей иконке «![]() » в левой части меню «Main Controller Settings». Далее подробно по каждой настройке.
» в левой части меню «Main Controller Settings». Далее подробно по каждой настройке.

Critically low battery warning
Данная настройка устанавливает остаточный заряд АКБ, который будет считаться системой критическим, при достижении которого будет автоматически активирована функция возврата домой.

Low battery warning
Данная настройка устанавливает остаточный заряд при котором система уведомит пользователя о его низком значении.

Smart return-to-home
Когда настройка активна, автоматический возврат домой будет осуществляться по той же траектории по которой осуществлялся пилотируемый полёт, что само по себе предопределяет наиболее безопасное возвращение дрона к месту взлёта.

Flight time
Таймер отражает время текущего полёта.

Advanced settings
В этом меню можно вкл/откл отображение индикатора напряжения АКБ, установить настройки для саморазряда батареи и узнать о её текущем статусе. Далее подробно по каждой настройке.

Show voltage on main screen
Когда настройка активна в верхнем правом углу главного экрана полёта будет отражаться индикатор напряжения АКБ.


Time to discharge
Настройка устанавливает срок по истечении которого произойдёт саморазряд АКБ. Данная настройка обеспечивает правильную эксплуатацию LiPo батареи и не допускает её хранение в заряженном состоянии.

Ditails
В данном разделе отражается серийный номер АКБ, дата производства, сколько раз она заряжалась и статус текущего состояния.

Gimbal settings
В этом меню пользователь может изменять режимы работы стабилизирующего подвеса камеры. Для перехода тапните по соответствующей иконке в виде «фотоаппарата ![]() » в левой части меню «Main Controller Settings». Далее подробно по каждой настройке.
» в левой части меню «Main Controller Settings». Далее подробно по каждой настройке.

Gimbal mode

Gimbal mode (Режим Подвеса) — доступны два режима работы подвеса:
- Follow = камера всегда стабилизируется и сохраняет горизонт (стандартный режим работы).
- FPV (First Person View/Вид от первого лица) = имитирует полёт гоночного дрона/полёт птицы, т.е. в этом режиме камера дрона зафиксирована, и когда дрон будет поворачивать/наклонятся, картинка в режиме от первого лица будет также отображаться с кренами. Режим актуален для полёта в DJI FPV очках.
Advanced settings

Это меню позволяет настроить 3 различные конфигурации определяющие работу подвеса. Рекомендуется поиграть с каждой настройкой, чтобы всецело понять, как они работают. Например, можно установить настройки каждой конфигурации по принципу быстро, нормально и медленно:
- Конфигурация 1 = скорость движения подвеса по умолчанию.
- Конфигурация 2 = подвес работает быстро. Может быть актуально при фотосъёмке, чтобы можно было быстро выставить камеру, не упустив ни одного уникального кадра.
- Конфигурация 3 = скорость движения подвеса более медленная. Будет актуально для съёмки идеальных панорам.
Adjust gimbal roll
Настройка позволяет вручную подкорректировать горизонтальное положение камеры, если вы заметили, что горизонт не идеальный.

Gimbal auto calibration
Настройка обеспечивает автоматическое выравнивание горизонтального положения камеры. Тапните по «Gimbal Auto Calibration», перед тем как приступить к авто калибровке, система попросит пользователя убедиться в том, что дрон находится в горизонтальном положении и ничто не мешает движению подвеса (например, снят ли транспортировочный фиксатор подвеса). Если всё нормально, то тапните OK, чтобы начать автоматическую калибровку. Для отмены тапните «Cancel».

General settings
В этом разделе представлены различные настройки таких параметров как система мер, аппаратного декодирования, предела пика фокусировки, настройки кэша, прямой трансляции, а также здесь находится ключевая информация о дроне, пульте, мобильном приложении. Для перехода тапните по соответствующей иконке в виде «трёх точек ![]() » в левой части меню «Main Controller Settings». Далее подробно о каждом разделе, подразделе и настройке.
» в левой части меню «Main Controller Settings». Далее подробно о каждом разделе, подразделе и настройке.

Units

Measurement Unit (Система мер) — позволяет выбрать систему мер:
- Imperial (Имперская)
- Metric m/s or km/h (Метрическая м/с или км/ч)
Camera
Enable hardware decoding
Enable Hardware Decoding (Разрешить Аппаратное Декодирование) – отключает и включает аппаратное декодирование.

К сведению
- Если имеют место быть задержки или зависания в момент трансляции видеопотока в режиме реальном времени (FPV), попробуйте активировать аппаратное декодирование, поскольку это может способствовать лучшей передаче изображения.
- Аппаратное декодирование помогает с вычислительной мощностью, которая требуется для декодирования видео в реальном времени. Поэтому, если вы используете более старый или медленный смартфон/планшет, активируйте аппаратное декодирование, поскольку оно также может помочь уменьшить перегрев устройства, так как ему не нужно будет усердно работать для декодирования живого видеопотока, поступающего с дрона.
Peak focus threshold
Peak Focus Threshold (Предел Пиков Фокусировки) – подсвечивает красным на дисплее все входящие в зону фокусировки объекты. Можно выбрать режим подсветки: Normal (Нормальный), Low (Тусклый), High (Яркий).


Long press action
Long Press Action (Действие при длительном касании основного экрана) — настройка устанавливает действие, которое будет выполняться в момент длительно касания главного экрана полёта. Доступно два действия: Gimbal Control (Управление Подвесом) и Focus (Управление фокусировкой).

2 Оптимальное управление
С точки зрения управления коптер представляет собой не самую простую конструкцию – мы имеем 8 двигателей, которыми можно управлять индивидуально, но практически каждый из них влияет на все 12 из переменных состояния (фазовых координат) коптера. То есть, если мы будем «рулить» одним из двигателей – менять его обороты в большую или меньшую сторону, это будет оказывать воздействие на каждую из координат x, y, z и на каждую из трёх угловых скоростей.
Кроме случаев, когда вектор тяги параллелен какой-либо из координатных плоскостей системы B – тогда на 4 из 12 переменных состояния данная сила тяги воздействовать не будет. И, если бы мы делали всё методами классической теории управления, то можно было бы записать 8х12 = 96 передаточных функций между 8 входными воздействиями и 12 выходными (переменными состояния) коптера.
Также, изменение оборотов (частоты вращения) двигателей приводит к нелинейному (а к квадратичному) изменению силы тяги. В проектировании регуляторов коптера это предполагается как аксиома, и она довольно хорошо согласуется с экспериментальными данными.
Задача оптимального управления заключается в том, чтобы перевести коптер из точки А в точку Б с минимальным перерегулированием, по оптимальной (как правило кратчайшей) траектории и за минимальное время. При этом налагаются ограничения на максимальную скорость, ускорения и углы наклона коптера (отклонение от горизонтальности).
Проблема заключается в том, что в «прямую» сторону можно довольно несложно посчитать – как воздействует каждый из двигателей (8 переменных – 8 частот вращения) на каждую из 12 переменных состояния. А если учитывать еще и ускорения, то на каждую из 18 переменных.
Если не сильно вдаваться в теоретические дебри теории оптимального управления и нелинейного программирования, такую задачу можно свести и решить методом множителей Лагранжа, а точнее – условиями и методом Каруша-Куна-Такера, где ограничения, накладываемые на переменные, представляют собой неравенства.
Чтобы упростить изложение, приведем краткий ход решения задачи. Для начала запишем матрицу Г размерностью 6х8 – по количеству каналов управления (6) и количеству ВМГ (8), которая будет отображать как именно каждый из двигателей влияет на каждый из каналов управления:
Где: fi|x,y,z – это коэффициент перед 

 Рисунок 16. Структура регулятораМетодами теории оптимального управления (подробнее см. [1, раздел 4.1.1]) задача решается поиском так называемой обратной псевдоинверсной матрицы
Рисунок 16. Структура регулятораМетодами теории оптимального управления (подробнее см. [1, раздел 4.1.1]) задача решается поиском так называемой обратной псевдоинверсной матрицы 

На практике, для заданной геометрии коптера и полученных 48 чисел в матрице Г, получаем другие 48 чисел, которые определяют правило управления (микширования) двигателей, при поступлении той или иной команды по какому-либо каналу управления. На рисунке 16 представлена общая схема построения регулятора.
Задатчик положения вырабатывает нужные координаты, в которые требуется привести коптер. Они сравниваются по какому-то алгоритму с измеренными координатами и управляющий алгоритм вырабатывает 6 управляющих воздействий, по каждому из каналов управления.
На основе посчитанной псевдообратной матрицы 
Управляющие команды по каждому из каналов управления формируются как рассогласование между заданной координатой (углом) и текущей, измеренной координатой. Это в самом простом варианте. В более сложном управляющий алгоритм должен иметь в своём составе алгоритм приоритетности стабилизации положения коптера над алгоритмом перемещения в пространстве.
Дело в том, что по каждому из каналов есть запас (располагаемая у ВМГ возможность) управления. И, если (например) мы сделаем приоритетным перемещение по оси х то при большом рассогласовании между текущей координатой x и заданной регулятор будет стремиться наклонить всё больше и больше коптер вокруг оси y, и при определенном наклоне уже не хватит возможностей двигателей обеспечивать стабилизацию коптера и регулирование высоты полёта.
Для коптера с конкретными параметрами двигателей, винтов, массы и размеров это всё можно вычислить и наложить нужные ограничения на управляющие воздействия ui(t), а также их приоритет. Но это выходит за рамки данной статьи, где мы делаем модель в общем виде.
Выпишем аналитические выражения для элементов первых двух столбцов матрицы Г в случае рассматриваемого октокоптера (без реактивного момента ВМГ и без прецессии!):
Видно, что первая ВМГ (ось силы тяги которой параллельна плоскости yz) не создаёт никакой силы вдоль оси x и никакого момента вокруг оси x (т.к. пересекает её). Поэтому при управлении по оси x или для создания вращательного момента вокруг оси x первый двигатель «бесполезен».
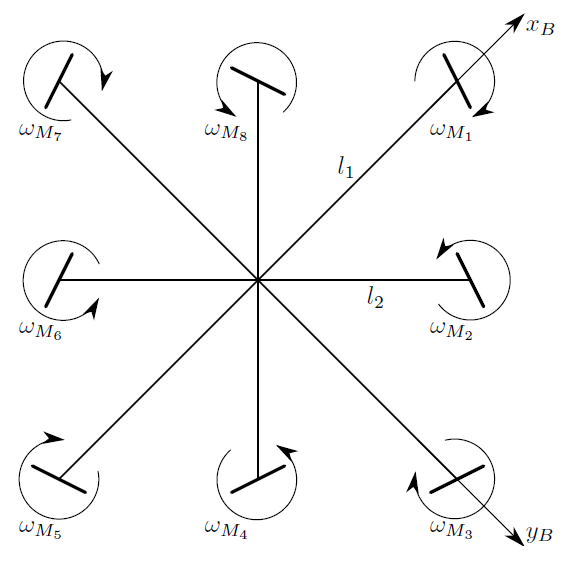

Третья колонка – управление по оси z, имеет отрицательные числа т.к. ось z направлена вниз, а вектора силы тяги ВМГ – вверх. Обратим внимание, что абсолютные значения чисел третьей колонки гораздо меньше, чем первой и второй и все имеют один и тот же знак.
Это означает что коптер имеет гораздо лучшую управляемость по вертикальной оси, что очевидно, т.к. все ВМГ как раз и работают практически в эту сторону (а не влево-вправо-вперёд-назад). Четвёртая колонка и пятая – это управляемость коптера по крену и тангажу, последняя шестая – по курсу.
Видно, что по курсу коптер гораздо слабее управляем, чем по крену и тангажу. Но для наших целей, и для целей настоящей обучающей статьи, этого было достаточно. Подбором направлений сил тяги ВМГ (и перевычислением матриц для новой геометрии) можно этот баланс менять.
Обратим также внимание на то, что теоретически – при вычисленном и приведенном здесь количественно микшировании двигателей, достигается только управление по выбранному каналу, без влияния на другие каналы управления. Т.е. при выбранном расположении ВМГ у октокоптера, в некоторых малых пределах можно изменять направление вектора тяги, без создания поворотных моментов т.е. не наклоняя сам коптер, и он будет горизонтально лететь и управляться без наклонов. Но только в очень узком диапазоне скоростей и внешних возмущений.
Общая структура регулятора приведена на рисунках 17 и 18.
Рисунок 17. Общая схема регулятораРисунок 18. Схема каналов регулятораВ самом простейшем случае — на 6 входов регулятора поступают заданные фазовые координаты, они сравниваются с текущими (измеренными) и в общем случае в соответствии с матрицей
Iris


Под капотом: регуляторы оборотов (ESC) в объединены на одной плате.
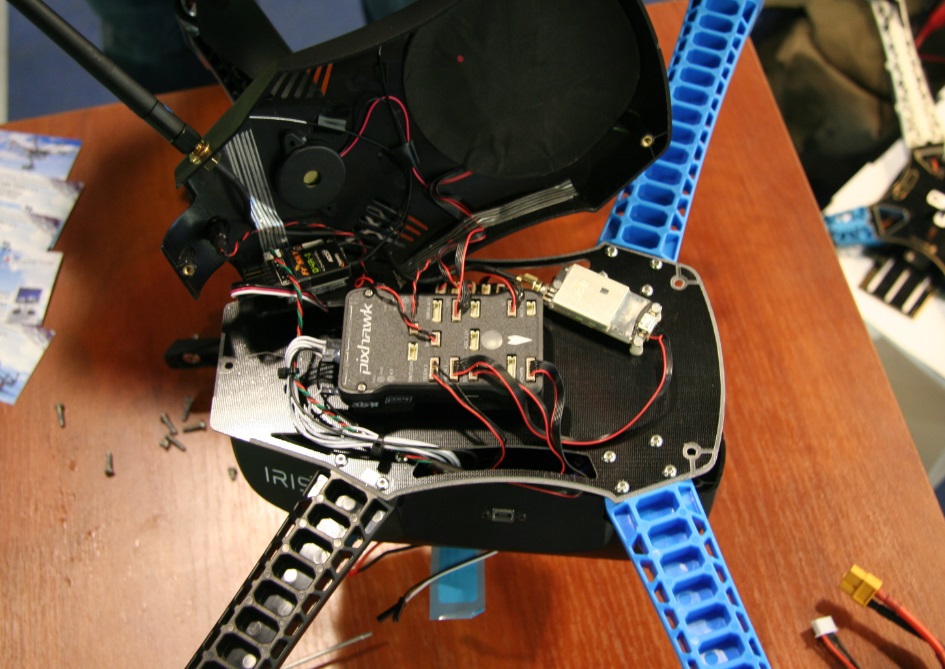
Под капотом с другой стороны. Pixhawk(открытый и свободно разрабатываемый проект автопилота высокого класса, который применяется в хоббийном, академическом и профессиональном сообществом (по BSD лицензии) при низких затратах и высокой доступности) представляет собой развитую систему автопилота проекта PX4 с открытым аппаратным исходниками и изготавливаемым 3D Robotics. Он имеет передовой процессор и датчики от ST Microelectronics и операционную систему реального времени NuttX. Pixhawk имеет интегрированную многопоточность, в Unix/Linux-подобную среду программирования, совершенно новые функции автопилота, таких как Lua Scripting миссий и поведений полета, и слой специального PX4 драйвера обеспечивая плотное время во всех процессах.
Pixhawk является высокопроизводительным автопилотом в одном модуле, подходит для установки в крыло, квадрокоптер, вертолет, автомобили, лодки и любую другу роботиризированную платформу, которая может двигаться. Автопилот позиционируется как высший класс любительских, исследовательских и отраслевых потребностей и является модулем «все в одном» сочетая PX4FMU и PX4IO.
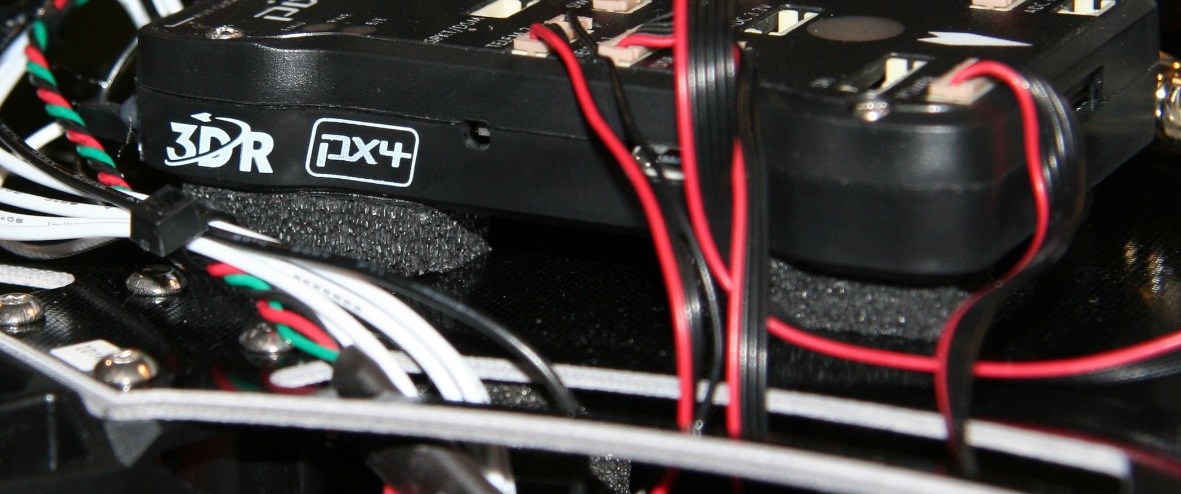
Для уменьшения вибрации PIXHAWK закреплен на вспененные полосы
===============
(фотка с официального сайта)
Очень тихие и малопотребляющие моторы. Хорошая балансировка. Интересная особенность — мотор со всех сторон закрыт, то есть находится внутри луча и защищен от внешних воздействий типа падения. Моторы имеют нестандартное крепление для пропеллеров — там реализована как на фантоме правая и левая резьба, то есть пропеллеры самозатягивающиеся, но диаметр вала другой, так что от фантома пропеллеры не подойдут

Пропеллеры и телеметрия
в качестве платформы используется старый пульт Turnigy 9x. Но он был доработан. Стандартная прошивка заменена на
кастомную 9XR, позволяющую проводить более глубокие настройки, нормально назначать переключатели и поддерживающую вывод телеметрии. В качестве передающего модуля установлен FRSKY DJT с телеметрией, которая заведена внутрь пульта и отображается на дисплее. Очень удобно, что на самом пульте переделаны наклейки, подписаны функции переключателей

Проложить маршрут вокруг выставочного павильона в парке «Сокольники»

Усик антенны и экранирование. Под этой наклейкой находится GPS модуль — очень чувствительный к электромагнитным волнам, которые берутся из силовых проводов регуляторов. Для уменьшения воздействия на GPS есть 2 варианта — поднять как можно выше этот модуль на стойке — стандартно для самособранных аппаратов, но в этом случае он становится куда менее компактный и его очень легко сломать при падении, к тому же часто требуется вводить поправки на его положение, вариант номер два — поставить его внутрь корпуса, как тут или на «фантоме», но в этом случае требуется экранирование. чем лучше экранирование — тем меньше помех на GPS, лучше удержание, качественнее полет по точкам и больше шансов вообще вернуться домой в случае потери управления
Батареи хватает на 16(22) минут полета (полетное время зависит от нагрузки, ветра, высоты, температуры, влажности, стиля полета и навыков пилота)

Дисклеймер