
 - установка и настройка iNAV")
- How to reduce cpu load in betaflight
- To calibrate the accelerometer :
- Вкладка configuration
- Вкладка failsafe
- Как триммировать квадрокоптер. инструкция
- Квадрокоптер mjx x104g с камерой full-hd, весом до 250 г – mjx-x104g
- Краткий гайд по квадрокоптерам для fpv. часть четвёртая – поговорим о мозгах?
- Прошивка spracingf3
- Разновидности квадрокоптеров
- Триммирование при помощи пульта управления.
How to reduce cpu load in betaflight
The first thing to do would be to disable some unused, or non critical features on your flight controller. The place to do that is in the configuration tab, other features box.

If you have some features that you just can’t disable, you can also try to slow down the flight loop (how fast your flight controller calculates everything). This is also on the configuration tab but under the System Configuration box.

Here, I suggest incrementally changing the PID loop frequency until you have an acceptable CPU load (less than 50%). But you don’t want to go below 1kHz. You can also slow down the Gyro update rate, but this has a less significant effect. Also if changing the gyro update frequency you must power cycle (remove power completely and reconnect) your flight controller for the change to take effect.
If none of the above help reduces your CPU load, then its time to upgrade your fight controller to a new one running an F4 or F7 MCU.
I hope that this article has helped you figure out why your quadcopter is not arming. I have only touched on the most common problems, but if you are still stuck just ask below and we will try to help you figure it out together.
To calibrate the accelerometer :
- Make sure you place your drone on a level surface,.
- Press the calibrate accelerometer button.
- After a few seconds it will complete and the model shown now be level.

Most pilots run the accelerometer calibration during their initial configuration. However, from time to time a bad bump or hard crash can knock the calibration out a little so you might need to do this again. If you are on the field and cant access your computer you can use a stick command to calibrate the accelerometer.
Вкладка configuration
- Раздел ESC/Motor Features
Протокол регуляторов скорости (регуляторов оборотов) — посмотрите на характеристики вашего оборудования, какие протоколы оно поддерживает. Рекомендуется использовать DShot. Обычно регуляторы с прошивкой BLHeli_S поддерживают DShot300 или DShot600, а с прошивкой BLHeli_32 — даже DShot1200.
Дополнительная информация: протоколы и прошивки для регуляторов скорости.
Рекомендую отключить параметр «MOTOR_STOP«, иначе вы не сможете определить армлен коптер или нет.
Остальные параметры можно не трогать и оставить значения по умолчанию.
2. Раздел System Configuration
Looptime — время цикла, с этой частотой полетный контроллер рассчитывает полетные параметры, значение зависит от возможностей процессора, на шумных коптерах я предпочитаю использовать довольно низкую частоту 2 кГц, а на качественных коптерах — частоту повыше — 8 кГц. В любом случае, для начала подойдет и 2 кГц.
Gyro Sampling Rate — частота опроса гироскопов, обычно совпадает с looptime, хотя некоторые предпочитают поставить удвоенную частоту looptime. Можете поставить 4 кГц и looptime 2 кГц.
Потом поэкспериментируете и выберете наиболее подходящие значения, жестких правил по их выбору нет.
При смене значений этих параметров обратите внимание на CPU load (загрузка процессора) внизу экрана, старайтесь держать это значение меньше 30%. Если значение будет выше, то полетный контроллер может работать нестабильно.
Accelerometer — можно отключить, это высвободит немного процессорных ресурсов, но тогда вы не сможете использовать режимы Angle и Horizon, а 3Д модель на вкладке Setup перестанет двигаться. Еще одна причина по которой отключают эту функцию — чтобы избежать проблем при арминге коптера, если он сильно наклонен.
Отключите Barometer и Magnetometer, они нам не нужны, т.к. мы летаем на миникоптере.
3. Раздел Personalization
Craft name — название коптера, это значение будет отображаться на экране при помощи Betaflight OSD.
4. Раздел Receiver
Если у вас приемник SBUS, IBUS или Spektrum Satellite, тогда выбирайте «Serial-based receiver» в выпадающем списке «Receiver Mode». В параметре Serial Receiver Provider нужно выбрать SBUS, т.к. у нас приемник FrSky.
Если приемник использует PPM, тогда выберите PPM RX Input в списке Receiver Mode.
5. Раздел Other Features
Обычно я включаю нижеуказанные функции Betaflight. Если вы не уверены в том, нужны ли они, просто оставьте значения по умолчанию, они не помешают первому полету.
- Anti-Gravity
- Dynamic Filter
- Telemetry (чтобы работала SmartPort телеметрия)
- OSD (если ваш ПК поддерживает Betaflight OSD)
Нажмите Save & Reboot.
Вкладка failsafe
C failsafe всё оказалось несколько сложнее, чем мне виделось ранее. На профильных форумах иногда встречаются холивары на тему “где лучше настраивать failsafe: на приёмнике или на ПК?” На самом деле, правильно это вопрос звучит так: “где лучше настраивать failsafe: только на приёмнике или на приёмнике и на ПК?”
Настраивать failsafe на приёмнике необходимо в любом случае. По крайне мере, на Frsky D4R-II, который я использую. Дело в том, что у него есть три варианта поведения при потере сигнала от передатчика:
- передать на ПК сигнал, имитирующий предустановленные положения стиков и переключателей (режим Pre-set Positions, именно он и описан в мануале)
- продолжать передавать на ПК последние данные, полученные от передатчика (режим Hold Last Position)
- прекратить передавать сигнал на ПК (режим No Pulse)
По умолчанию в Frsky D4R-II установлен режим Hold Last Position, который способствует улёту аппарата в далёкие дали. Так что если использовать failsafe только на приёмнике, надо настраивать режим Pre-set Positions. Другое дело, что failsafe активируется даже при кратковременной потере сигнала.
Будет очень неприятно, если сигнал через долю секунды восстановиться, а квадрокоптер уже задизармил моторы и падает вниз. Ситуацию может улучшить настройка failsafe на ПК, так как там этот режим имеет задержку срабатывания, что служит фильтром от кратковременных потерь сигнала.
Кроме того, там есть настраиваемый сценарий, согласно которому квадрокоптер будет себя вести в случае активации failsafe. Например, можно включить режим со стабилизацией и попытаться более-менее мягко сесть или вообще активизировать RTH, если он есть.
Нюанс в том, что, если на приёмнике установлен режим Pre-set Positions или Hold Last Position, то ПК даже не узнает, что произошла потеря сигнала. Таким образом, failsafe на ПК можно использовать лишь в том случае, если на приёмнике установлен режим No Pulse.
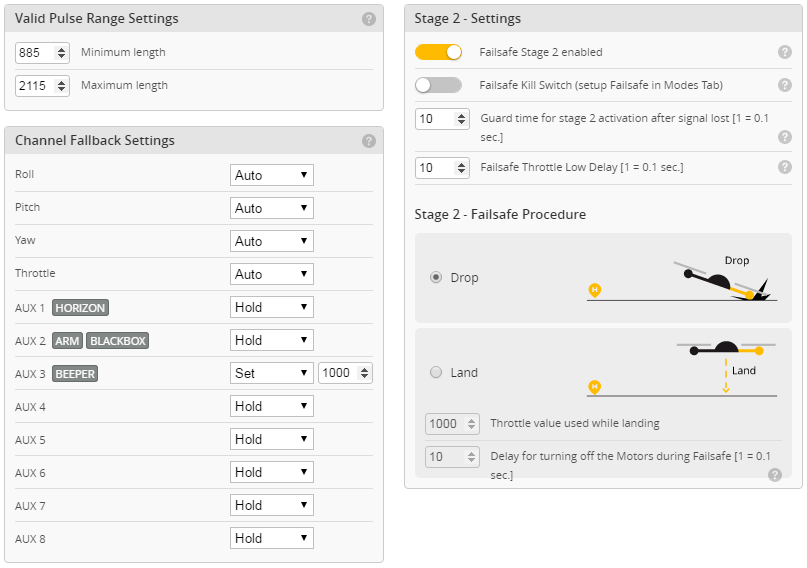
На вкладке Failsafe Betaflight Configurator`а я сделал следующее:
- В разделе “Channel Fallback Settings” установил значения переключателей передатчика, которые нужно будет сымитировать. В моём случае только включил пищалку на AUX3.
- Активизировал Failsafe Stage 2.
- Установил задержку активации режима failsafe 1 сек (значение 10 в пункте “Guard time for stage 2 activation…”)
- Установил время работы моторов после активации failsafe 1 сек (значение 10 в пункте Failsafe Throttle Low delay).
- В Failsafe Procedure выбрал сценарий с падением (Drop), а не с попыткой плавного приземления (Land).
Betaflight Configurator, вкладка Failsafe
Как триммировать квадрокоптер. инструкция
В этой статье мы расскажем вам, как триммировать квадрокоптер. Процесс триммирования можно назвать проще и понятнее – по своей сути, это калибровка устройства. 90% моделей выпускается уже откалиброванными и попадает вам в руки в комплектации Ready to Fly, но в ходе транспортировки от ударов эти настройки могут сбиться. Поэтому, если при полёте ваш коптер имеет крен на какую-то из сторон или вовсе летит не туда, куда вы указываете, не спешите сдавать его как брак – просто произведите триммирование.

Первое, что нужно сделать перед триммированием, — это разобраться с функционалом джойстиков пульта дистанционного управления. Как правило, левый стик отвечает за перемещение дрона в вертикальной оси, а правый – за крены вбок и наклоны вперед. И второе, о чем стоит знать — это то, что процесс триммирования лучше всего производить только в воздухе.
Если устройство не наберет высоту хотя бы в 0,5 метра, то тянуть его будет создаваемая винтами воздушная подушка. Если же он наберет большую высоту, то вы сможете откалибровать его для зависания в воздухе без кренов и наклонов. Триммирование может быть необходимо как левому, так и правому джойстику. Как понять, с каким из рычагов управления проблема у вас?

- Если квадрокоптер постоянно кренится на левый или правый бок, то триммировать необходимо правый рычаг и производить регулировку по крену.
- Если квадрокоптер самостоятельно наклоняется то вперед, то назад – триммирование требуется для левого стика, регулировка которого будет производиться по тангажу.
- Если квадрокоптер одновременно и кренится на бок, и наклоняется, то вам придется откалибровать оба стика.
Для начала стоит понять, в каком из случаев квадрокоптеру требуется калибровка. Итак, вот поэтапный процесс:
- Первый этап – включение пульта ДУ и квадрокоптера.
- На втором этапе квадрокоптер запускается и поднимается на высоту минимум в 50 сантиметров. Уже на этом этапе возможно понять, в какую из сторон кренится дрон. Если на этом этапе вам для зависания приходится выполнять дополнительные маневры, можно сразу сказать, что триммирование квадрокоптеру необходимо.
- На третьем этапе вам предстоит выбрать между механической калибровкой и автоматической.

Теперь рассмотрим, чем отличаются механическая и автоматическая калибровка. Механическая используется в случае, когда отклонения значительные. Если же калибровка требует смещения положения триммера максимум на 5 позиций, воспользуйтесь автоматической калибровкой с пульта.
Процесс механической калибровки заключается в повторении одного и того же пункта – постепенного подкручивания регулятора тяги между тарелкой и сервоприводом. Автоматическая же калибровка подразумевает перечень действий со специальными переключателями в зависимости от проблемы. Так, если вертолет постоянно наклоняется вперед, поставьте триммер тангажа в нижнее положение. Повторяйте это несколько раз, пока коптер не достигнет желаемого положения.
Та же процедура необходима и в случае, если коптер наклоняется назад – только триммер ставится в верхнее положение. Аналогичные действия совершаются и в случае, если нужно откалибровать коптер влево или вправо. Если дрон уносит влево, установите триммер в крайнее правое положение, а если вправо, то в крайнее левое. Процесс настройки квадрокоптера для новичков показан на видео ниже.
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Квадрокоптер mjx x104g с камерой full-hd, весом до 250 г – mjx-x104g
Радиоуправляемый квадрокоптер MJX X104G GPS WiFi FPV 1080P – X104G – это новая модель от лучшего производителя летательных аппаратов в среднем ценовом диапазоне. Компактный размер, стильный дизайн, простое интуитивно понятное управление и самые современные технологии и компоненты.
MJX X104G оснащен надежными коллекторными моторами с автоматической системой блокировки при столкновениях, защищающей их от преждевременного выхода из строя, а также обеспечивающей безопасность полета.
Эта модель со встроенным GPS, барометром для удержания высоты, а также FullHD 1080P камерой, способной транслировать видео в режиме реального времени на экран смартфона. С помощью официального приложения “MJX GPS” пилот сможет видеть всё, что снимает камера. Дальность управления квадрокоптером – до 600 м. Видеотрансляция в HD-качестве передаётся на расстояние до 300 метров.
Система GPS позиционирования делает полеты контролируемыми и беззаботными. Вы всегда будете знать точное местоположение X104G и направление его движения.
Основные функции модели:
- Автоматический взлет и посадка: достаточно нажать на одну кнопку и дрон самостоятельно выполнит самые сложные для всех пилотов операции.
- Автоматический возврат домой: в течение всего полета вы можете воспользоваться функцией автоматического возврата в исходную точку нажатием одной кнопки на пульте управления.
Интеллектуальные режимы управления:
- Полет по точкам: для полета по точкам вам будет необходимо задать маршрут полета в мобильном приложении, после чего отправить квадрокоптер по заданному маршруту. Квадрокоптер будет лететь от точки к точке, поворачиваясь камерой по направлению движения, до тех пор, пока не завершит облет.
- Облет вокруг точки: достаточно отлететь на то расстояние и высоту, на которой вы планируете совершать облет и активировать эту функцию. Квадрокоптер MJX X104G в автоматическом режиме будет совершать облет вокруг вас (вокруг вашего смартфона) на заданном расстоянии и высоте пока вы не решите остановить этот процесс. Данная функция позволит вам снять себя со всех сторон!
- Функция следования: при активации этой функции, коптер ориентируется на местоположение вашего смартфона. То есть MJX X104G следует за вашим телефоном и его камера направлена всегда в его сторону. Благодаря этой функции вы сможете сделать отличные селфи снимки и съемку вашей прогулки, например на велосипеде.
- Failsafe режим: в случае потери сигнала радиосвязи более чем на 6 секунд, система управления будет контролировать квадрокоптер автоматически и направит его обратно к последнему записанному домашнему пункту.
- Система безопасности при низком заряде бортового аккумулятора: при низком заряде аккумулятора, интеллектуальная система оповестит пилота медленно мигающими красным цветом ходовыми огнями, а также индикацией на ЖК-экране и устойчивым звуковым сигналом.
- Дальность передачи изображений FPV: расстояние дистанционного управления до 600 м, 1080P изображение с камеры в реальном времени транслируется до 300 метров.
- LED ходовые огни: яркая светодиодная подсветка делает полеты ночью и в темное время суток такими же легкими, как и днем.
Особенности:
- камера Full HD 1080P 5G WiFi, видео 1080P 30 кадров/сек, фото 8Mp;
- FPV трансляция изображения с камеры на экран смартфона;
- встроенный модуль GPS;
- автоматический взлет и посадка;
- автовозврат в точку взлета;
- возврат домой и посадка при низком заряде аккумулятора;
- Headless режим;
- интеллектуальная система оповещения при слабом заряде АКБ, слабом радиосигнале;
- встроенный барометр.
Технические характеристики:
- время полета – около 12 минут;
- время зарядки – около 2 часов;
- скорость полета – 4-6 м/с;
- дальность полета – до 600 м;
- онлайн трансляция видео – 200-300 метров;
- камера с панорамным обзором (110°);
- коллекторные моторы;
- бортовой аккумулятор Li-Po 3.8V 1500 mAh;
- двухсторонняя система радиоуправления 2.4G.
Что входит в комплект:
- собранный и готовый к полету MJX X104G;
- аппаратура управления 2.4G;
- аккумулятор;
- зарядное устройство;
- запасные пропеллеры;
- отвертка/съемник пропеллеров;
- руководство пользователя.
Необходимо докупить:
- батарейки для пульта АА – 4шт;
- карта памяти microSD для записи фото и видео до 16Gb.
Квадрокоптер работает с приложением MJX GPS.
Перед использованием полностью зарядите аккумулятор.
Не допускайте полного разряда аккумулятора — извлекайте его из дрона после полета. Храните аккумулятор в заряженном состоянии, НЕ вставляя его в дрон.
Для увеличения времени работы модели рекомендуем приобретение дополнительных аккумуляторов.
Перед эксплуатацией ознакомьтесь с инструкцией.
Краткий гайд по квадрокоптерам для fpv. часть четвёртая – поговорим о мозгах?
Если Вы наткнулись на этот пост в ленте и не читали предыдущие – вот они:
Первая часть, в которой я рассказал о том, что такое FPV-полёты и что для них нужно, а так же посоветовал пару коптеров для новичков.
Вторая часть – про аккумуляторы и аппаратуру радиоуправления.
Третья часть – про движки и регуляторы.
К несчастью, из-за повышенного режима безопасности в связи с праздниками полетать и заснять материал мне не удалось. Так что сегодня – предпоследняя часть про теорию.
Ну а для начала – небольшой экскурс в историю. Давным-давно, когда деревья были выше, а трава зеленее, на территории ныне почившей страны росли и развивались кружки авиамоделизма. И в этих самых кружках дети, которые сейчас уже взрослые дяденьки, строили кордовые модели. Модели эти были жёстко соединены с пилотом при помощи тросов и ручки, изменяя положение которой пилот, собственно, и отклонял рули. Прошли года, на рынках появилась доступная аппаратура радиоуправления, и вместо стальных тросиков рули на модели стали отклоняться при помощи радиоволн и сервомашинок. Но принцип – принцип оставался тот же. Движением стика на пульте или ручки управления пилот напрямую отклоняет рули или изменяет обороты двигателя. Думаете, на квадрокоптерах применяется тот же самый принцип? А вот и нет. И в этом основное их преимущество.
Полётом дрона управляет полётный контроллер – по сути своей полноценный микрокомпьютер. Именно он, а не Вы, управляет креном, тангажом и рысканьем модели. Вы лишь указываете, в каком направлении лететь или, в режиме Акро (о нём расскажу чуть дальше), с какой угловой скоростью вращаться. Поэтому огромное количество дешёвых китайских дронов-игрушек и снискали такую популярность – управлять ими, по сравнению с моделями тех же самолётов, не в пример проще.
По итогу, вся жизненно важная начинка дрона состоит из полётного контроллера – мозга дрона, платы распределения питания, а так же подсоединённых к ним четырёх (6, 8) регуляторов с моторами и приёмника аппаратуры радиоуправления. Вот так всё это выглядит в сборе:
В центре, с белой стрелкой – полётный контроллер. Под ним расположена плата распределения питания (PDB). На фото к ней идут самые толстые красный и чёрный провода от жёлтого разъёма справа. У задних вертикальных стоек слева стоит приёмник. Чёрно-белые провода с чёрных разъёмов справа и красно-чёрные средние провода идут к регуляторам.
Внутренности игрушки же выглядят немного по другому:
Тут всё в одном – и полётник, и приёмник, и pdb, и регули… Осталось подключить батарейку с моторами и лететь.
Но главная разница между серьёзным дроном и игрушкой всё же не в этом. На довольно большом количестве мелких дронов всё собрано на одной платке:
А главная разница – в прошивке. И как раз о ней мы сейчас и поговорим. Вот так выглядит интерфейс серьёзного, “не игрушечного” полётника, подключённого к компу:
Да, люблю я Пелевина =)
А игрушечный дрон так просто не подключишь и не перепрошьёшь.
Но зачем всё это надо? Прошивки-перепрошивки, подключения… Летает – и чего ему мешать?
Во-первых, удобство. В бетафлайтовском интерфейсе полётник (и соответственно дрон) каждый пилот может настроить под себя. Начиная с того, на каком переключателе аппаратуры будет арминг (то есть включение движков дрона, на каком – пищалка для поиска упавшей модели (надо ли говорить, что на игрушечном пищалка вообще не предусмотрена) и кончая настройкой поведения самого дрона в полёте – будет ли он прощать новичкам ошибки или же действовать стиками придётся с ювелирной точностью. Настройка дрона, рейты и ПИДы это отдельная и ОЧЕНЬ серьёзная тема, и не факт, что у меня хватит скилла про всё это рассказать.
А во вторых, режим АКРО. Вспомните, как летает игрушка. Отклонил стик вперёд – и коптер летит вперёд с определённым углом наклона. Отпустил – сразу возвращается в положение, параллельное горизонту. Стик вправо – коптер летит таким же макаром, но вправо. Но сколько ты его вправо не отклоняй – бочку коптер не сделает. Такой режим, когда коптер двигается, как клешня в игровом автомате-хватайке и автоматически возвращается в горизонт при отпускании стика называется режимом автоматической стабилизации (стабом).
В стабе Вы управляете направлением движения дрона.
А что же АКРО? Акро – это гоночный режим. Это фристайловый режим. И там Вы управляете не направлением движения, а вращением дрона. Поэтому, как только Вы освоились с основными принципами управления дроном – учитесь летать в акро. Только этот режим раскроет полный потенциал вашего дрона и позволит летать уже по-настоящему. А вот крохотной игрушечной платке на этот режим просто не хватит “мозгов”.
Теперь – о том, какой-же полётник всё-таки брать. Для гоночных бодрых полётов я советую полётники на f4 – третьей серии процессора. У меня на основном сетапе стоит airbot f4 – доволен более чем.
Наглядную разницу между стабом и акро я покажу, как выберусь в поле. А пока по традиции – ответы на все вопросы в комментах.
P.S. Я специально упростил некоторые вещи – у нас гайд всё-таки для новичков.
Прошивка spracingf3
На этом этапе я застрял дольше всего, так как были проблемы с прошивкой. Оказалось, шить надо обязательно с замыканием boot-контактов (как в этом видео).
Кстати, иногда бывает, что ПК защищён от записи и невозможно прошить новую прошивку. Вот инструкция от Олега Бовыкина, как это исправить. На случай, если оригинал станет недоступен, продублирую её ниже.
Китайский Seriously Pro Racing F3: Лечим ошибку STM32 communication failed
Пожалуй, самой популярной прошивкой на сегодняшний день, вполне заслуженно, является Cleanflight. После её установки достоточно только настроить протокол приёмника и квадрокоптер уже может вполне сносно лететь.
Благодаря открытому коду прошивки, у неё есть несколько ответвлений (форков). Самым интересным из них является Betaflight от человека под ником Boris B. Прошивка очень динамично развивается и некоторые её “фичи” потом переходят в “родительский” Cleanflight (например, полётный режим Airmode).
Минусом Betaflight является то, что релизы выходят достаточно часто, а стабильность их не всегда высока. Кстати, эта причина на несколько недель задержала написание данной статьи. На момент завершения сборки квадрокоптера как раз вышла версия 2.8.0, которая имела пару ошибок и отличалась недружелюбными дефолтными настройками.
Очень быстро появилась исправленная версия 2.8.1 RC1, но опыт работы программистом подсказал мне, что лучше подождать релиза. Я не прогадал, так как одновременно с релизом версии 2.8.1, появился и Betaflight Configurator.
Можно сказать, что это новый этап в истории данной прошивки. Дело в том, что по мере своего развития Betaflight всё больше и больше отдалялся от Cleanflight и конфигуратор последнего становился всё более и более бесполезным, так как основная часть настроек всё равно делалась через консоль CLI.
Ниже я подробно опишу, как я настроил свой квадрокоптер через Betaflight Configurator.
Разновидности квадрокоптеров
В первую очередь вам нужно понять, для каких именно целей будет использоваться устройство. Согласитесь, незачем брать профессиональную модель, если изделие приобретается ребенку. Обратный пример тоже вполне логичен — для профессиональной видеосъемки не подойдет дрон с простенькой 2-мегапиксельной камерой, продающийся за 5 тыс. рублей.
Все современные квадрокоптеры условно делятся на несколько разновидностей:
- Дроны-игрушки — такие изделия имеют наименьший ценник. Чаще всего они получаются очень маленькими, в связи с чем их не рекомендуется выносить на улицу, где ветер попросту сдует такой квадрокоптер. Многие модели управляются при помощи смартфона, что сильно снижает радиус действия.
- Любительские дроны — их сейчас производится больше всего. Такие квадрокоптеры тоже бывают совершенно разными. Чаще всего производитель делает выбор в пользу средних размеров, а управление возлагает на специальный пульт. Некоторые модели имеют встроенную камеру. Однако её разрешение редко достигает приемлемого значения, да и съемка без стабилизатора ни к чему хорошему не приводит.
- Любительские дроны с камерой на подвесе — уже достаточно продвинутые решения, за которые просят немалую сумму. Тем не менее, для съемки качественного видео такие модели всё ещё не подходят, так как они не оснащены продвинутым функционалом. Да и не всегда в их состав входит стабилизатор — иногда приходится «колхозить», устанавливая его самостоятельно. Сколь-либо тяжелую камеру подобный квадрокоптер не поднимет.
- Профессиональные дроны среднего ценового уровня — поле, где царствует компания DJI. Такие изделия летают на километры вокруг, поднимаясь на достаточно большую высоту. Им не составляет труда нести камеру GoPro или ей аналогичную. Бывают и компактные модели со встроенной камерой — к их работе тоже не возникает никаких претензий. Также профессиональные устройства отличаются присутствием продвинутых функций — автоматическим возвращением на точку старта, самостоятельной съемкой выбранного объекта и многими другими.
- Профессиональные дроны высшего класса — эти изделия по карману только киностудиям и фирмам, зарабатывающим созданием видеоклипов или рекламных роликов. Даже свадебные фотографы практически не используют столь дорогостоящие изделия. Подобные квадрокоптеры способны поднять груз весом в несколько килограммов. Это позволяет применять их для съемкой профессиональной камерой традиционного или панорамного типа. Также эти устройства используются для транспортировки груза, военной разведки или даже спасательных действий.
Конечно же, это только условное деление. На самом деле профессиональный квадрокоптер не обязан быть большим — в ассортименте той же DJI имеется и миниатюрная модель, которая даже в школьном рюкзаке много места не займёт. Но именно на вышеприведённый список нужно ориентироваться после того, как вы определитесь с предназначением гаджета.
Триммирование при помощи пульта управления.
Сделав пробный взлет, мы обнаружили, что вертолет сильно тянет в одну из сторон, несколько перемещений индикатора триммера не исправило ситуацию, тогда вернем триммер в нулевое положение и приступим к механическому триммированию модели.
Изменим длину тяги от сервопривода до тарелки автомата перекоса, подкрутив соответствующий регулятор совсем немного. Помните, что регулировать необходимо по-немногу, каждый раз проверяя результат. Основные действия должны заключаться в следующем:
- Если вертолет уходит вперед – снимите правую тягу, вращая наконечник тяги против часовой стрелки удлините ее немного и поставьте обратно.
- Если вертолет уходит назад – снимите правую тягу, вращая наконечник тяги по часовой стрелке укоротите ее немного и поставьте обратно.
- Если вертолет уходит влево – снимите левую тягу, вращая наконечник тяги против часовой стрелки удлините её немного и поставьте обратно.
- Если вертолет тянет вправо – снимите левую тягу, вращая наконечник тяги по часовой стрелке укоротите ее и поставьте обратно.
Удлинение и укорачивание тяг производите плавно и проверяйте результат, порой достаточно повернуть наконечник на несколько градусов, чтобы добиться нужного результата.После каждого действия с регулировкой, запускайте модель и проверяйте ее поведение в воздухе. Повторите указанные выше пункты несколько раз, чтобы добиться необходимого эффекта и стабильного полета.
Механическое триммирование можно прекратить добившись хорошего, но не отличного результата – более тонкую настройку стабильности зависания можно добиться при помощи триммирования с пульта управления.
Триммирование с пульта управления также начинается с пробы взлета и поднятия на высоту от 50 сантиметров.
Настройка триммирования производится при помощи специальных переключателей на пульте, расположенных сбоку и снизу от рычагов (стиков). Нам нужен правый рычаг и переключатели слева и снизу от него. Слева переключатель отвечает за тангаж (полеты вперед, назад), снизу – крен (полеты, крены влево, вправо)Для регулировки вертолета произведите следующие действия в зависимости от поведения вертолета:
- Если вертолет уносит вперед – переключите триммер тангажа вниз (переключатель находится слева от правого рычага). Переключайте триммер вниз несколько раз до стабильного удержания и исключения полета вперед без рычага.
- Если вертолёт уносит назад – переключите триммер тангажа вверх (переключатель находится слева от правого рычага). Переключайте триммер вверх несколько раз до стабильного удержания и исключения полета назад без рычага.
- Если вертолёт уносит влево – переключите триммер крена вправо (переключатель находится снизу правого рычага). Переключите триммер вправо несколько раз до стабильного удержания модели и исключения полета влево без рычага.
- Если вертолёт тянет вправо – переключите триммер крена влево (переключатель находится снизу правого рычага). Переключите триммер влево несколько раз до стабильного удержания модели и исключения полета вправо без рычага.
Повторите указанные выше рекомендации для выравнивания модели в воздухе и наслаждайтесь полетом.


