

- Вводная информация про p2p режим
- Основные принципы выбора аппаратуры радиоуправления для автомоделей
- Что понадобится для сборки
- Flysky gt2 и gt2b: необходимый минимум функций и надёжность по минимальной цене
- Flysky gt3c – большие возможности и высокое качество по доступной цене
- Flysky it4 – флагманская хоббийная система на ос android
- Futaba 4px – аппаратура для спорта высших достижений
- Traxxas tqi – гибкие настройки при помощи мобильного устройства телеметрия
- Автомодельные системы радиоуправления – от простейших моделей до флагманов
- Выбор за вами, мы будем рады помочь!
- Дополнительные модули
- Инвайты
- Как устроены радиоуправляемые модели » сайт для электриков – советы, примеры, схемы
- Машинки на радиоуправлении — купить в москве радиоуправляемую машинку в акушерство.ру
- Настройка p2p режима, на борту стоит wi-fi
- Настройка p2p режима, на борту стоит yota
- Настройка сервера рцборды
- Некоторые нюансы при связи по 4g
- Немного про задержку
- Общий принцип подключения моторов машинки
- Проверка подключения виртурилки к сети
- Смартфон управляет игрушечным автомобилем
- Ссылки
- Управление автомобилем с джойстика через arduino mega
Вводная информация про p2p режим
Так как для канала управления и для канала видео используется UDP — так и хотелось сделать полноценный P2P (Peer-to-peer) линк, чтоб не гонять видео от борта до сервера и обратно до клиента. Ну, раз хотелось — взял и сделал 🙂 Фактически, получился простой и лёгкий аналог адобовского RTMFP (не путать с RTMP). Только вот передачу звука добавить никак руки не дойдут, так что рцборда пока немая и глухая.
С UDP какая основная проблема — преодоление NAT. Так как на одном из концов линка (на передающей стороне или на приёмной) обязательно есть NAT — просто указать адрес и порт сервера (или клиента) не получится — NAT помешает. В виндовом Virt2real Player есть возможность с помощью UPnP сделать проброс порта, но это не совсем то чего я хотел.
А то что хотел — получилось только после вдумчивого курения технологии UDP Hole Punching. В итоге всё получилось как надо — неважно, какой роутер, неважно где клиент или сервер. Главное чтоб был выход в Интернет. Хотя вру, есть один единственный тип NAT, который пробить пока не удалось. Всё время забываю как он правильно называется, вроде бы симметричный NAT.
И да, обычные TURN и STUN серверы в рцборде не используются, только своя реализация. Как я обычно говорю: хочешь изучить технологию — сделай по своему, а потом сравни с общепринятыми решениями. Любители велосипедов меня поймут. Однако часто оказывается что велосипед не так уж плох и свои задачи выполняет лучше чем общепринятые решения.
Это так, лёгкий оффтоп был. Продолжаем про NAT. Поддержка P2P есть пока только в виндовом приложении Virt2real Player, в андроидное и айфонно-айпадное ещё не добавлял. Проверял работу с коннектом через свисток Yota, через свисток Beeline 4G, через точку доступа на смартфоне, который в инет выходил тоже через Beeline 4G.
Во всех этих случаях всё работает, но заметил что идеально только через Yota. Через билайн (в любом из опробованных видах) тоже работает, но коннект дольше времени занимает. Почему так происходит — пока не разбирался. Из печального — пока не удалось заставить работать линк (и команд, и видео) когда и клиент и сервер подключены через 4G свистки. Возможно, тут как раз симметричный NAT и подкрался.
Основные принципы выбора аппаратуры радиоуправления для автомоделей
Перечисленные здесь особенности – важные и заметные по мнению большинства опытных пользователей, на них стоит обратить внимание при выборе. Если у Вас уже есть готовый RTR-комплект – изучите передатчик и узнайте, каким из этих требований он соответствует, и есть ли смысл заменить его на другой.
Сегодня производители готовых моделей всё чаще снабжают свои комплекты аппаратурой высокого уровня. Если Вы взялись за сборку шасси из KIT-набора и самостоятельный подбор комплектующих – будет правильным сразу же купить оптимальную систему радиоуправления, соответствующую Вашим личным требованиям.
- Дальность действия и качество связи. Как правило, автомодели способны быстро разгоняться до высокой скорости, по динамике они уверенно превосходят полноразмерные машины. Именно по этой причине непрерывная и уверенная передача сигнала – это Ваша безопасность и безопасность окружающих;
- Эргономика. По этому критерию нет «хороших» и «плохих» передатчиков – есть те, которые подойдут именно Вам. Разумеется, есть и универсальные решения для повышения удобства, например – применение накладок из мягкого пластика и даже изменяемого положения рулевого колеса;
- Прочность и долговечность. Вас может удивить то, насколько многие из «бесплатных» передатчиков, включённых в комплекты моделей, быстро приходят в негодность при агрессивной манере управления. В таком случае определённо стоит заменить систему радиоуправления на более надёжную;
- Настраиваемые параметры. К ним относятся: регулировка расходов по всем каналам, экспоненты (нелинейность отклика, от этой настройки зависит чувствительность управления), функция ABS и много другое;
- Сохранение настроек. Имея такую возможность, Вы узнаете, насколько просто и удобно иметь один передатчик для всех моделей;
- Скорость отработки и точность управления. Возможно, эти параметры не будут понятны начинающему пилоту, однако именно они часто играют решающую роль на гоночной трассе. Кроме аппаратуры радиоуправления, этим требованиям должны соответствовать применяемые сервомашнки;
- Доступность приёмников, их наличие в продаже;
- Специальные возможности. Прежде всего, могут понадобится дополнительные каналы управления – они могут использоваться, например, для включения задней передачи модели с ДВС или для управления светом фар. Есть и более редкие функции, например: специальные микшеры для краулеров, управление чувствительностью гироскопа, замедление каналов и многое другое. Вполне возможно, что Ваша следующая модель потребует их наличия;
- Телеметрия. Её наличие не обязательно, однако сильно помогает пилоту. Передача данных о температуре и оборотах двигателя упрощает обкатку и настройку ДВС, дистанционный контроль напряжения силового аккумулятора помогает продлить ресурс батареи, а знать текущую скорость автомобиля – как минимум, интересно. Зачастую информация дублируется голосовыми командами и вибрацией – это очень удобно, в ответственные моменты можно не отвлекаться на дисплей передатчика.
Что понадобится для сборки
- Машинка c регулятором двигателя, двигателем и сервой
- Аккумулятор (любой с подходящим для регулятора напряжением)
- Контролер Virt2real (Виртурилка) с камерой, переходник USB-OTG, флешка micro-SD
- Свисток Wi-Fi или Yota (можно и любой другой 4G модем)
- Руки умеренной линейности
Но сначала, чтобы продемонстрировать некоторые варианты использования
Flysky gt2 и gt2b: необходимый минимум функций и надёжность по минимальной цене
Эти системы радиоуправления начального уровня нередко можно встретить в RTR-комплектах именитых производителей, что не удивляет – в своём ценовом диапазоне эти передатчики отличаются высокой помехозащищённостью и большим радиусом передачи сигнала.
Эти особенности особенно важны при эксплуатации модели в условия загрязнённого городского эфира. Комплекты GT2 и GT2B идентичны по арсеналу функций, электронной и высокочастотной части. Главное отличие – более современный дизайн и компактный размер передатчика GT2B.
Особенности:
- Триммеры и реверсы на оба канала, настраиваемые расходы для первого канала;
- Высокая дальность и помехозащищённость;
- Крышка защищает ручки триммеров, расходов и переключатели реверсов от случайного вмешательства в процессе использования;
- Только для GT2B – встроенная в корпус антенна, опциональная накладка на ручку в комплекте;
- Только для GT2 – разъём 3.5 мм для подключения к компьютеру и тренировок на симуляторе.
Flysky gt3c – большие возможности и высокое качество по доступной цене
Если взять аппаратуру GT2, заменить корпус на более прочный и экономичный, добавить дополнительный канал, дисплей и множество настроек – мы получим GT3C, «народную» систему радиоуправления, стабильно популярную с момента своего появления в 2023 году.
Особенности:
- Дополнительный третий канал управления;
- Настраиваемые расходы и экспоненты для двух основных каналов;
- Настраиваемая функция ABS;
- Цифровые триммеры – их настройки нельзя сбить, когда передатчик выключен;
- Память на 10 моделей.
Flysky it4 – флагманская хоббийная система на ос android
Эта система радиоуправления занимает высшую ступень в линейки FlySky. Четыре канала управления, расширенная телеметрия и наличие всех существующих на сегодняшний день функций для автомоделей – это ещё не всё. iT4 – первая в мире система на платформе Android с сенсорным дисплеем.
Особенности:
- Сенсорный дисплей для отображения информации;
- Разрешение – 1024 точки, малое время отклика;
- Двусторонняя связь для повышения качества передачи сигнала;
- Последовательное подключение датчиков телеметрии делает их установку удобной, уменьшает длину проводки и даёт Вам большие возможности в выборе параметров;
- Возможность обновление программного обеспечения.
Futaba 4px – аппаратура для спорта высших достижений
Флагман автомодельной линейки легендарной японской корпорации Futaba – этим всё сказано! Максимальное количество настраиваемых параметров, усовершенствованная механика, усиленный корпус, цветной дисплей и свободное назначение дополнительных каналов – всё это предлагается счастливому обладателю 4PX.
Особенности:
- Система радиоуправления на 15 граммов легче и на 30% быстрее по сравнению с предыдущей флагманской моделью;
- Рулевое управление может быть перенесено на обратную сторону для левшей;
- Курок может быть сдвинут на 7мм вперёд или назад;
- Возможно подключение 31 датчика телеметрии;
- Синхронизированное с данными телеметрии голосовое оповещение;
- Вибро-оповещение;
- Функции микшера для краулера;
- Внешняя алюминиевая рама;
- 5 программируемых микшеров;
- Память на 40 моделей.
Traxxas tqi – гибкие настройки при помощи мобильного устройства телеметрия
Оригинальный подход для своих систем радиоуправления высокого хоббийного уровня применяет американская компания TRAXXAS – передатчики, на первый взгляд, не имеют интерфейса для программирования, однако отличаются удивительно гибкими настройками – расходы, экспоненты, ABS, изменение настроек в реальном времени при помощи многофункциональной ручки – всё это и многое другое доступно пользователю.
Особенности:
- Доступны версии с различным количеством каналов и дополнительных органов управления;
- Настройка при помощи мобильного приложения TRAXXAS Link для iOS и Android;
- Виртуальная приборная панель – показания датчиков телеметрии в реальном времени выводятся на дисплей Вашего смартфона;
- Доступна версия с уникальной системой стабилизации TRAXXAS TSM в комплекте;
- Микро-приёмники TRAXXAS поместятся в радиобокс практически любой модели, при этом компактность достигается не за счёт снижения дальности действия.
Автомодельные системы радиоуправления – от простейших моделей до флагманов
Перечисленные выше пункты помогут Вам начать ориентироваться в ассортименте любого бренда, однако мы посчитали, что несколько примеров могут быть полезны. Ниже перечислены 5 систем радиоуправления из нашего каталога, по порядку – от начального до высокого спортивного уровня.
Мы постарались выделить их наиболее яркие и заметные особенности. Если Вас заинтересовал один из этих товаров – не пожалейте времени, чтобы ознакомиться с его полным описанием, отзывами на форумах, а самое главное – найдите возможность подержать передатчик в руках!
Выбор за вами, мы будем рады помочь!
Надеемся, что эта статья поможет Вам выбрать аппаратуру, наиболее точно соответствующую Вашим личным требованиям и достойно начать новый сезон. Если у Вас появились вопросы или Вам нужна консультация – мы всегда рады помочь! Чтобы увидеть понравившиеся товары, подержать их в руках и попробовать в действии – приезжайте к нам в магазин, компетентные специалисты будут рады встрече!
Дополнительные модули
Во вкладке «Дополнительные модули» находится список активных и неактивных модулей рцборды.
Модуль — это отдельное приложение (исполняемый бинарник), которое обычно выступает в качестве источника телеметрии. Активные модули — это те, которые запускаются автоматически при старте рцборды и завершаются при завершении её работы. В панели управления можно перемещать модули из одного столбца в другой, нажатием на оранжевую стрелочку.
Инвайты
Чтобы было проще передать кому-то параметры для подключения к нашей машинке в режиме P2P, были созданы намётки механизма инвайтов. Что такое инвайты — знают все. Удобная штука. Так что сейчас попробую рассказать как этим пользоваться. В плеере это пока в тестовом, сыром, виде, но вроде как работает.
Итак, открываем виндовый Virt2real Player, щёлкаем правой кнопкой мыши по окну, выбираем «Инвайт» -> «Создать инвайт». Важный нюанс — плеер должен быть настроен на P2P режим, т.е. в настройках сети указаны все вышеописанные параметры для подключения к машинке.
Как устроены радиоуправляемые модели » сайт для электриков – советы, примеры, схемы
Радиоуправляемые модели автомобилей вызывают в последние годы все более живой интерес как у детей, так и у взрослых. Это могут быть модели на электродвигателе или даже на двигателе внутреннего сгорания.
В рамках данной статьи мы раскроем тему устройства радиоуправляемых моделей различных типов, и рассмотрим принцип их работы, чтобы тот, кто заинтересуется конструированием собственных радиоуправляемых моделей или просто их покупкой, знал, с чем ему предстоит иметь дело.
Что касается радиоуправляемых моделей автомобилей, то в первую очередь нужно обратить внимание на то, что масштабы бывают очень разными, начиная от 1:5, заканчивая 1:28. Наиболее популярны сегодня масштабы 1:8 и 1:10, а что касается масштаба 1:5, то это очень крупные модели, которые в основном являются моделями на ДВС. Двигатель внутреннего сгорания больше в размерах, чем электродвигатель.
По объему цилиндров двигатели внутреннего сгорания подразделяются на классы: 12, 15, 18, 21, 25. Это цифры, обозначающие рабочий объем двигателя в кубических дюймах, в соответствии с американской классификацией. Очевидно, чем выше класс двигателя, тем выше его мощность. Так, например, мощность двигателя 15 класса составляет в среднем 0,9 л.с.
Двигатели внутреннего сгорания для радиоуправляемых моделей работают, как правило, на смеси масла, метанола и нитрометана. Такое топливо в канистрах можно приобрести в магазинах, где продаются радиоуправляемые модели. Фирменное топливо — гарантия долговечной работы мотора.
Говоря об электродвигателях, следует отметить, что питаются они, как правило, от аккумуляторов, набранных в батарею, и общее напряжение батареи составляет 7,2 В и более.
В магазинах радиоуправляемых моделей продаются такие аккумуляторы, как в виде отдельных ячеек по 1,2 В, так и в виде готовых батарей различной емкости. Сами двигатели классифицируются по количеству витков обмотки статора, обычно — от 10 и более, и чем меньше витков, тем выше скорость вращения ротора.
Основой модели является шасси, ведь именно на шасси располагаются и крепятся как сам двигатель, так и электроника. Шасси бывают различных типов, с разными модификациями приводов, в зависимости от назначения модели. Формула-1 обычно заднеприводные (чаще) или полноприводные (реже), чтобы по ровной поверхности развивать высокую скорость.
У багги, которые водят по гравию, по песку, – чаще всего привод полный, реже — задний. Аналогично багги, траки чаще всего используют полный привод. Монстры с огромными колесами, в основном – полный привод. Шоссейные модели, для езды по ровным поверхностям, чаще — с полным приводом.
Когда стоит вопрос выбора между электродвигателем или двигателем внутреннего сгорания, важно сравнить все достоинства и недостатки того и другого типа двигателей, чтобы выбор получился рациональным.
Так, модели на жидком топливе способны развивать огромные скорости — до 80 км/ч, но задумайтесь, чем чреваты аварии, лобовые столкновения на таких скоростях. Стоит случайно врезаться в стену, и потребуется дорогостоящий ремонт.
Потяните ли вы регулярные заправки качественным топливом, которое дороже бензина? Хотя, объем двигателя мал, и 4-литровой канистры хватит надолго, но все же. Плюс ДВС в том, что продолжительность езды по времени довольно значительна, при этом звук двигателя очень реалистичен. Модели на ДВС дороже моделей на электродвигателях.
Отсюда виден основной минус радиоуправляемых моделей на электродвигателях — у них довольно быстро садится аккумулятор, и езда на одной зарядке вряд ли будет длиться более четверти часа. Но модели на электродвигателях, в сравнении с моделями на ДВС, ездят очень тихо, мотор почти не слышно, нет выхлопов, высокое ускорение, хотя и невелика скорость. Тем не менее, придется раскошелиться на хороший аккумулятор и на зарядное устройство, чтобы заряжаться от сети или от автомобильного прикуривателя.
Принципиально радиоуправление моделей не зависит от масштаба, оно устанавливается на модель в формате Ready to run, если вы покупаете модель, и не требует от потребителя ничего кроме того, чтобы взять в руки пульт, и приступить к вождению. Однако, некоторые модели продаются в виде конструктора, и наконец, кто-то захочет самостоятельно изготовить модель. Поэтому давайте все же рассмотрим принцип работы системы радиоуправления.
В моделях на электродвигателях (как и на моделях с ДВС) установлен приемник. Когда на пульте управления нажимается курок или поворачивается рулевое колесо, приемник внутри модели тут же принимает посланный с пульта сигнал. Сигнал обрабатывается в приемнике, и соответствующее устройство в конструкции модели приводится в действие.
При повороте рулевого колеса (на пульте), сервопривод заставит через тяги повернуться колеса. При нажатии на курок газа, регулятор скорости получит сигнал к изменению оборотов двигателя, и через передачу (кардан или ремни) колеса начнут вращаться быстрее или медленнее. Мотор, как и электроника приемника с регулятором скорости, питается от батареи.
Если говорить о моделях с ДВС, то при нажатии на курок газа на пульте, или при повороте руля на пульте, все так же посылается сигнал в приемник. Приемник обрабатывает сигнал, и включает соответствующие устройства.
При повороте руля на пульте, через систему тяг сервомотор заставит колеса повернуть. При нажатии на газ, второй сервомотор станет двигать заслонку карбюратора, и топливно-воздушная смесь будет подана в цилиндр потоком определенного объема, – скорость изменится. Для питания сервомоторов используется батарея.
Итак, как вы поняли, в конструкцию именно радиоуправляемой модели входят следующие неотъемлемые ее компоненты: пульт управления, приемник, сервоприводы, двигатель (электрический или ДВС), регулятор скорости для электродвигателей. Данные части продаются в виде комплектов или по отдельности.
Остановимся более подробно на принципе работы электроники передатчика и приемника. Передатчик представляет собой в простейшем виде высокочастотный генератор и низкочастотный модулятор. Модулятор включает высокочастотный генератор с частотой команды. Излучаемый антенной пульта, модулированный высокочастотный сигнал принимается приемником, установленным на модели.
Приемник содержит усилитель низкой частоты, высокочастотный каскад и электронное реле. Высокочастотный каскад усиливает и детектирует принятый сигнал, затем сигнал фильтруется, и отфильтрованный сигнал поступает на вход усилителя низкой частоты. Ток низкой частоты сигнала команды действует на эмиттерный повторитель, который приводит к срабатыванию реле в цепи питания соответствующего двигателя.
В простейшем виде радиоуправляемая модель способна ехать вперед и поворачивать, это зависит, разумеется, от количества сервоприводов. Так, квадрокоптер может обладать шестью приводами.
Что касается команд, то они могут передаваться и по радиоканалу, и по wi-fi, и по bluetooth, и по ИК, благодаря тому, что сигнал как-никак всегда кодируется, и не создает помех, а приемник легко распознает свой сигнал, благодаря предварительной настройке.
Теперь остановимся на аккумуляторах для моделей с электродвигателем. Сегодня распространены три типа аккумуляторов: Никель-кадмиевые, никель-металлгидридные и литиевые. Напряжение 7,2 В характерно для первых двух типов, и 7,4 вольта — для литиевых. Литиевые нынче все более популярны, их емкость достигает десятков миллиампер-часов, хотя цена, конечно, соответствующая.
Что касается жидкого топлива, то здесь, как говорилось выше, требуется особое топливо, которое содержит нитрометан. Нитрометан усиливает отдачу ДВС, и содержание сего компонента обычно лежит в диапазоне 16-25%. Содержащееся в топливе масло обеспечивает двигателю смазку. На канистре с топливом указывается процентное содержание в топливе нитрометана, а также тип моделей, для которых данное топливо подойдет.
Кузовы изготавливают из поликарбоната, – легкого и эластичного материала, стойкого к ударам. В продаже есть модели с кузовом и без. Кузов для своей модели можно приобрести и отдельно. Благо, выбор кузовов сегодня очень велик.
Есть прозрачные и окрашенные варианты. Прозрачные можно покрасить изнутри краской для поликарбоната, такая краска продается в магазинах моделей. Для новичков лучше всего подойдет кузов более эластичный, чтобы управление неопытного водителя не привело бы к быстрому его разрушению от аварийных ударов.
Смотрите также у нас на сайте: Устройство и программирование микроконтроллеров для начинающих
Машинки на радиоуправлении — купить в москве радиоуправляемую машинку в акушерство.ру
Машинки на радиоуправлении – это высокотехнологичная игрушка, принцип работы которой заключается в передаче сигнала от передатчика в пульте управления к приемному устройству на машине. На каждом пульте для управления находятся специальные кнопки, которые отвечают за передвижение машинки.
Радиоуправляемые машинки всегда будут желанным подарком и не оставят равнодушными ни детей, ни взрослых. Игры с машинами на пульте управления развивают координацию движений, пространственное мышление, внимание, моторику рук и быстроту реакции у детей и взрослых.
При покупке машинки на радиоуправлении стоит обратить внимание на следующее:
- Габариты машинки. Тут нужно определиться, где игрушка будет использоваться. Если в помещении, тогда лучше выбрать вариант 1:10, если на улице – 1:5;
- Модель. Лучше определиться заранее, это могут быть игрушки, в точности копирующие модели машин известных брендов, или машины-внедорожники для игры на улице, или машины-конструкторы, которые ребенок сможет собирать самостоятельно или вместе с взрослыми;
- Тип двигателя. На рынке представлены модели с электромотором или с двигателем внутреннего сгорания. Вторые подойдут опытным игрокам и любителям машин;
- Тип шасси. Это могут быть машинки с традиционным шасси, с типом «монстр», «багги», «траки», «ралли»;
- Тип привода. Заднеприводные (подойдут для гонок дома) и полноприводные (устойчивые, проходимые, для сложных препятствий).
Купить машинку на радиоуправлении в Москве в интернет-магазине Акушерство.ру можно по цене от 250 рублей.
§
§
Настройка p2p режима, на борту стоит wi-fi
К Виртурилке на борту машинки подключён свисток Wi-Fi (т.е. как делали до сих пор по инструкции из этого топика). Только сначала мы управляли машинкой локально, а теперь сможем дать кому-нибудь порулить из Инета.
Для включения p2p режима идём веб-панель управления рцборды, раздел «Локальные настройки». Там устанавливаем параметр
role=p2p
Настройка p2p режима, на борту стоит yota
К micro-USB порту Виртурилки на борту машинки подключаем свисток Yota (через переходник USB-OTG, само собой). Те свистки, которые сейчас в продаже у Yota
В остальном всё аналогично предыдущему пункту. Разве что в настройках рцборды в разделе «Дополнительные модули» хорошо бы убрать из активных скриптов модуль statuswifi и наоборот, поместить в активные скрипты модуль statusyota, для того чтоб в плеере видеть параметры сигнала Yota.
Настройка сервера рцборды
Все настройки рцборды можно редактировать в специальной панели управления рцбордой (не путать с админкой Виртурилки). Вот так сейчас выглядит панель управления рцборды (первая версия)
Во вкладке «Общие настройки» можно задать имя устройства (отображается при обнаружении девайса в приложениях), указать надо ли запускать сервер рцборды автоматически при загрузке Виртурилки, задать тип конфигурации.
Некоторые нюансы при связи по 4g
После диких дропов при полёте на самолёте разобрались в чём проблема. Если коннект через 4G — надо параметр mtu устанавливать равным 1322 или меньше. Меньше не надо, ставим mtu=1322 и не паримся. В локальной сети я обычно вообще 16000 ставлю (максимальный размер Jumbo Frames), в локалке это нормально работает, а вот через Интернет уже проблемы будут с прохождением пакетов.
Немного про задержку
Главное требование к дистанционному управлению одно — как можно меньшая задержка от нажатия кнопки или перемещения джойстика до соответствующего изменения отображаемой с борта устройства картинки в видеопотоке. Когда публикуешь что-нибудь на тему удалённого управления обычно первый вопрос — «какая задержка?».
После многочисленных испытаний оказалось что задержки — штука субьективная и на комфортность управления влияет по разному. Само собой, всё зависит от максимальной скорости ездящего девайса. Для летающих девайсов (самолёты/коптеры) минимальность задержки очень важна, а вот при управлении ездящими устройствами — не всегда.
Когда я на очередной выставке Хобби-экспо рассекал по залу на переделанной радиоуправляемой багги, через десять минут руления поймал себя на мысли что задержка (какая бы она ни была) перестаёт ощущаться, начинаешь управлять «на упреждение». На почти половине скорости (а багги моя до 80 км/ч может разгоняться) спокойно гонял по залу, лавируя между павильонами, стульями, людьми.
Так что тут, скорее, важна стабильность задержки, а не её абсолютное значение в миллисекундах. Минимальная достигнутая задержка при коннекте к обычному роутеру через обычный Wi-Fi свисток была где-то в районе 200 мс, а при коннекте через общепризнанный эталон — мощные роутеры фирмы Ubiquity минимальная задержка при уверенном коннекте — около 100 мс.
Когда я управлял довольно скоростной багги в Шеньчжене, сидя дома в Москве, довольно комфортно было рулить, хотя только сетевой пинг от меня до сервера китайского 4G оператора был около 300 мс. Плюс ещё 100 мс наши — итого под полсекунды набегает. Однако отлично покатался 🙂
Общий принцип подключения моторов машинки
Обычно у RC машинки два мотора. Один обычный, коллекторный — крутит колёса. Второй — сервомотор, поворачивает передние колёса в нужную сторону. Т.е. получается что требуется всего два канала управления — газ и руль. Изначально (если машинка куплена в собранном виде) все каналы подключены к штатному радиоприёмнику трёхпиновыми разъёмами типа JR (стандартный серворазъём). Чёрный (или коричневый) провод — земля, красный — питание (5-6В), жёлтый (или белый, или оранжевый) — сигнальный провод.
Именно по сигнальному проводу мы и будем управлять моторами, но сначала надо подать питание на серву, которая рулит колёсами. Тут общий принцип такой — с бортового аккумулятора силовое питание с напряжением, равным напряжению аккумулятора, идёт по толстым проводам на мощный регулятор коллекторного (или бесколлекторного) мотора.
Внутри этого регулятора есть так называемый BEC — преобразователь напряжения, делающий из различного аккумуляторного напряжения стабильные 5 Вольт (иногда 6В, можно выбирать перемычкой на регуляторе), требуемые для питания бортовых сервомашинок, приёмника и различной другой электроники. Это стабилизированное питание обычно рассчитано на нагрузку не более чем 2-3А, хотя это тоже зависит от модели регулятора.
Выходное напряжение BEC по чёрному и красному проводам тонкого трёхжильного шлейфа от регулятора подаётся на приёмник. Здесь таится главный нюанс, который не все сразу осмысливают. Повторюсь — от регулятора идёт кабель с тремя жилами. Из них две жилы это питание, которое выдаётся с регулятора, т.е. это выход.
В приёмнике есть несколько групп трёхпиновых контактов. Их количество зависит от количества каналов, на которое приёмник рассчитан. У машинок обычно 2 или 3 канала, так что групп, соответственно, 3 или 4 (одна группа для установки перемычки Pair (сигнал на спаривание приёмника и передатчика).
У этих групп контактов все пины питания замкнуты между собой, т.е. земля и питание приходят с регулятора и подаётся сразу на все группы контактов. А вот сигнальные пины все независимые, на них выдаётся сигнал, принятый приёмником с радиоаппаратуры управления.
Так как управлять мы будем с помощью независимого контроллера, родной приёмник машинки нам не нужен, убираем его вообще. А трёхжильные шлейфы от регулятора и от сервомашинки нам необходимо соединить хитрым образом — чёрный провод соединить с чёрным, красный — с красным.
А оставшиеся белые (жёлтые или оранжевые) два проводка надо подключить к Виртурилке, а именно к пинам CON44 и CON43, см. схему . Какой именно провод к какому пину особо значения не имеет, так как каналы можно настроить потом в конфиге рцборды.
Должно получиться примерно такое подключение
Если под рукой есть сервоудлинители — удобно сделать подключение с их помощью. У меня с ними вечный напряг, так что я просто обрезаю проводки и кручиваю-спаиваю.
И да, самое главное — питание на Виртурилку подаём прямо с контактов аккумулятора. Ей нестрашно напряжение вплоть до 20В, так что чем выше напряжение — тем лучше, ток меньший будет потреблять. КПД преобразователя питания (SEPIC, установлен на самой Виртурилке) падает только после 15В, так что идеальное питание — от 12 до 15 В, при этом в полной нагрузке (с вифи)
Проверка подключения виртурилки к сети
- В процессе загрузки Виртурилки на ней будут загораться светодиоды. При включении питания, если загрузочная флешка успешно прочиталась, загорится зелёный светодиод. Затем, в процессе загрузке ядра загорится синий светодиод. После полной загрузки если подключение к Wi-Fi сети прошло удачно — загорится красный светодиод. А когда запустится рцборда (она прописана в автозапуске) все светодиоды погаснут красный светодиод начнёт моргать).
- Устанавливаем приложение для управления. Оно называется Virt2real Player и есть для Windows (дистрибутив или zip-архив), для Android, для IOS. Приложение для IOS в аппсторе ещё старой версии, новая проходит аппрув, так что пока ставить его бестолку — управление работать будет коряво.
- Открываем Проводник (если на компе винда), если Виртурилка успешно подключилась к локальной сети по вайфаю — в разделе «Сеть» должно появиться устройство «RCboard (Virt2real)». В админку можно попасть, нажав правой кнопкой мыши на этом устройстве и выбрав пункт меню «Просмотр веб-страницы устройства»
- Запускаем Virt2real Player для Windows или для Android, должен обнаружиться сервер RCboard. Обнаружение сервера в приложении под IOS пока не реализовано.
Смартфон управляет игрушечным автомобилем
За прошедшее десятилетие у многих появилось один два смартфона лежащих без дела, так и у меня. Решил применить смартфон для управления чем-нибудь, ну например, автомобилем.
Для начала выбрал игрушечный автомобиль из Лего. Он может двигаться вперед и назад, поворачивать вправо и влево и имеет пульт ДУ c ИК лучами. В качестве драйвера двигателей машинки используется микросхема LB1836, которая имеет четыре информационных входа. In1, In2 — управляют ходовым двигателем, In3, In4 — управляют приводом руля, по схеме 0, 0 или 1, 1 — нерабочее состояние. 0, 1 или 1, 0 — вращение двигателя в одну или другую сторону.
Логические 0 и 1 на входах формирует приемник ИК лучей игрушки при получении сигналов от ДУ.
Я для передачи сигналов от смартфона к машинке решил использовать экран смартфона, поскольку другие каналы передачи технически сложные и дорогие в реализации. К входам микросхемы LB1836 я решил подсоединить свое устройство, которое будет получать сигналы от смартфона.
Схема передачи сигналов такая. Программа в смартфоне создает световые пятна заданной продолжительности на экране, устройство их регистрирует и формирует логические 0 и 1 той же продолжительности на входах LB1836 без какой либо логической обработки, что очень упрощает конструкцию устройства. То есть, я просто подменил приемник ИК лучей своим устройством.
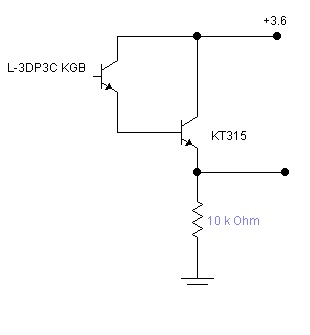
Устройство приема световых сигналов состоит из 4 ячеек. Каждая ячейка представляет собой фототранзистор L-3DP3C KGB подсоединенный к усилителю на npn транзисторе KT315. Питание берется с управляемой машинки. Выход, как я уже говорил, подсоединяется к соответствующему входу драйвера двигателя. Маломощные двигатели могут питаться прямо от выхода, но вращаться будут только в одну сторону. Но зато их будет четыре!
О выборе элементов устройства могу сказать следующее. Транзисторы я взял те, какие у меня были с давних времен. Фототранзисторы купил те, что были в магазине. Так что, желающие повторить схему, не тратьте время на поиски, воспользуйтесь теми элементами, что вам доступны. Кстати, вначале я усилитель собрал на микросхеме LM 324N с четырьмя операционными усилителями. Тоже хорошо работает, но мне показались его габариты слишком большими.
Устройство собрал на картонке, используя полоски медной фольги и элементы конструктора Лего.
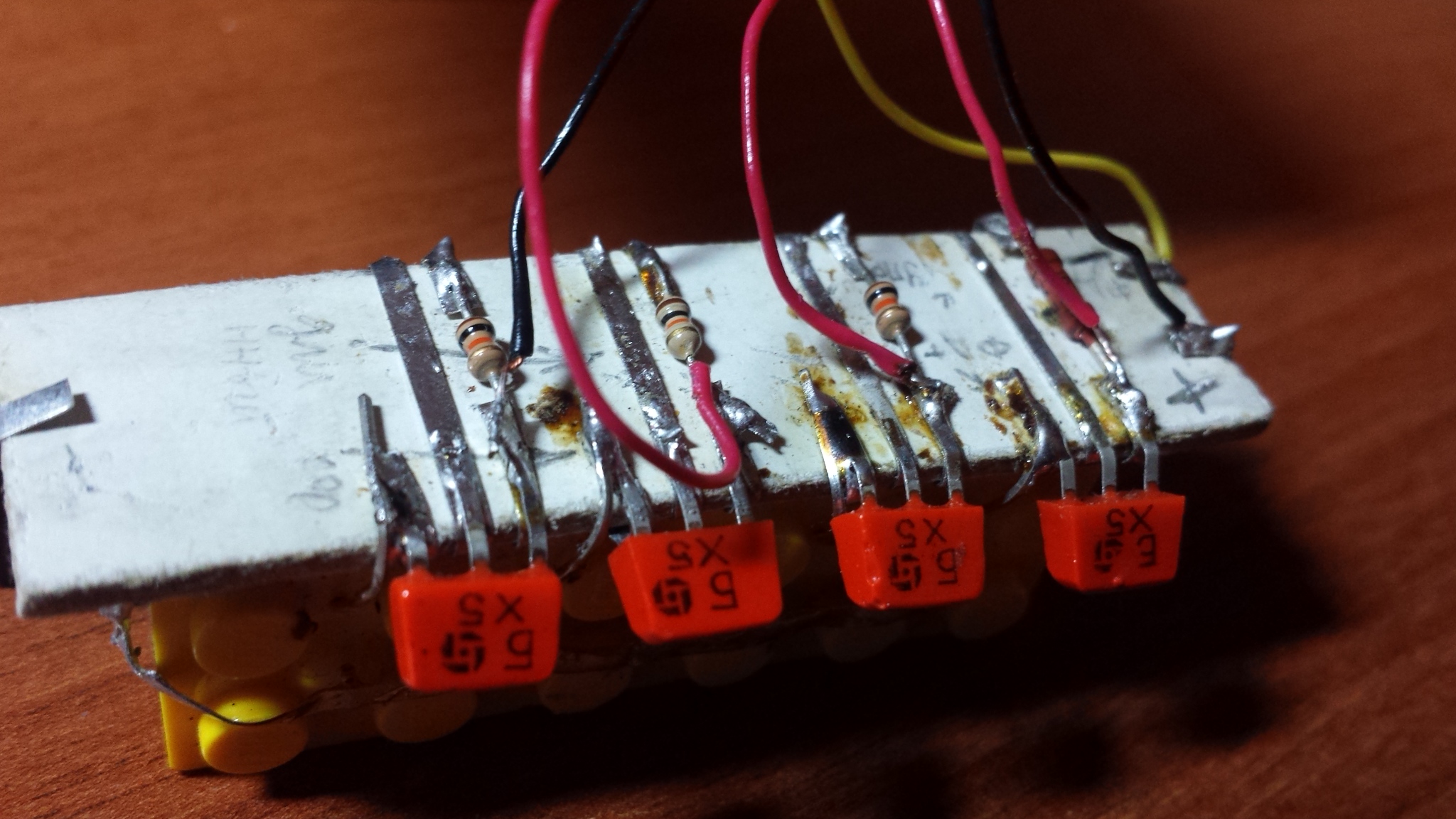
Фототранзисторы помещены на дно световых колодцев диаметром 5мм и глубиной 9 мм, что бы исключить боковое засвечивание. В световые колодцы вставлены металлизированные плёнки, свёрнутые в трубочку, что значительно повышает чувствительность фототранзисторов, за счет увеличения светового потока.
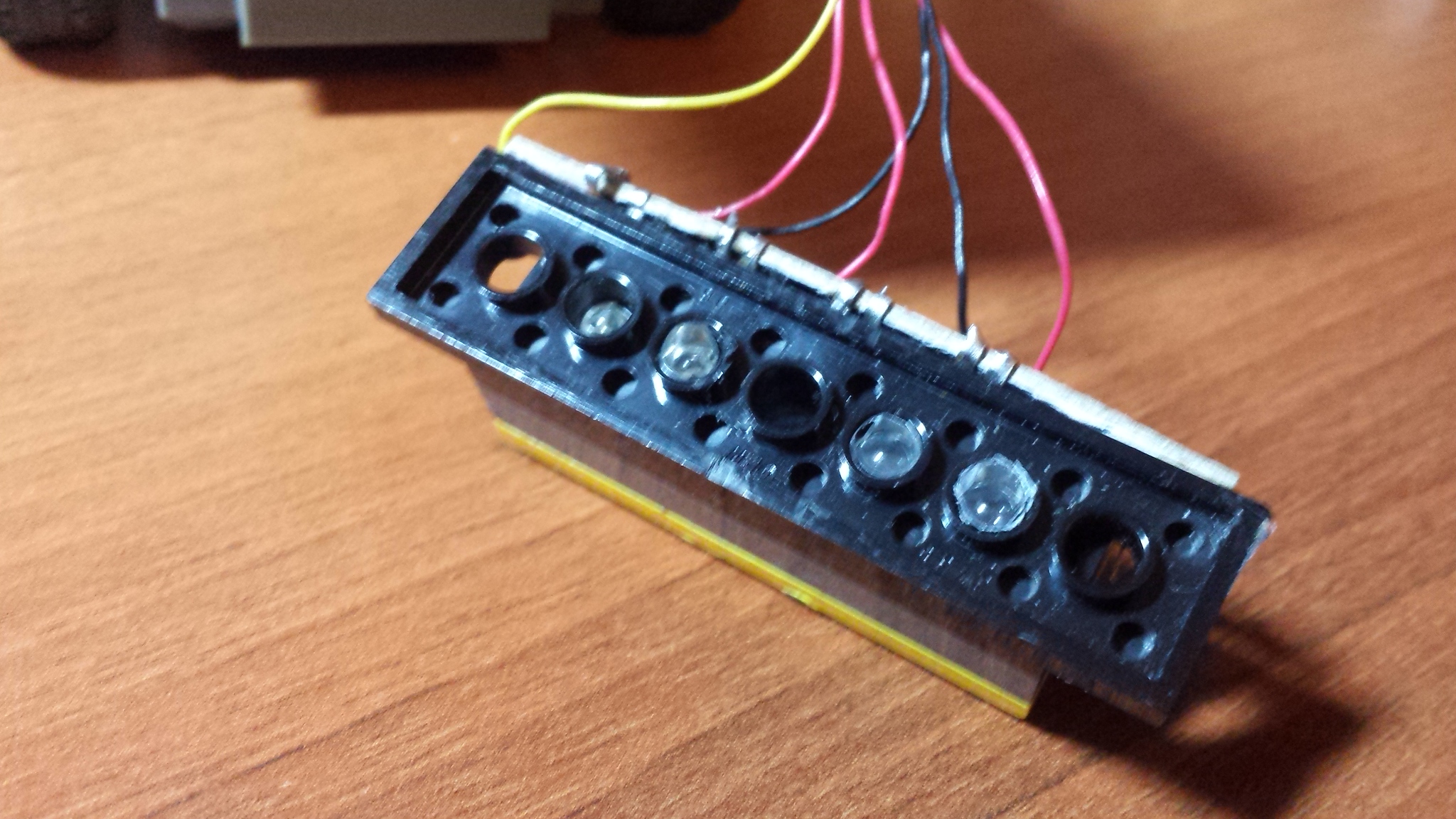
Вот такой получился автомобиль.

Для разработки программы я взял, приложение BASIC! из Googl Play Маркет. Это приложение позволяет писать программы для Android, создавать файлы apk и работать со всеми сенсорами и устройствами смартфона.
Листинг программы
DO
LET s$="Говорите команду: вперёд назад вправо влево или стоп"
TTS.INIT
TTS.SPEAK s$
TTS.STOP
STT.LISTEN "Говорите"
STT.RESULTS theList
LIST.SIZE theList, theSize
LET kom$="неудача"
FOR k = 1 TO theSize
LIST.GET theList, k, theText$
IF (theText$="вперед") THEN kom$="вперёд"
IF (theText$="назад") THEN kom$="назад"
IF (theText$="вправо") THEN kom$="вправо"
IF (theText$="влево") THEN kom$="влево"
IF (theText$="стоп") THEN kom$="стоп"
NEXT k
PRINT kom$
GR.OPEN 255, 0, 0, 0
GR.BRIGHTNESS 0.7
GR.ORIENTATION 1
GR.SCREEN w, h
a = 255
r = 255
g = 255
b = 255
fill = 1
GR.COLOR a,r,g,b,fill
LET wc=0.95*h
LET hc=w
LET m=36
GR.CLS
GR.CIRCLE n5, hc/m*9.5,wc,w/15.6
GR.CIRCLE n4, hc/m*13.5,wc,w/15.6
GR.CIRCLE n3, hc/m*18,wc,w/15.6
GR.CIRCLE n2, hc/m*22.5,wc,w/15.6
GR.CIRCLE n1, hc/m*26.5,wc,w/15.6
FOR i=1 TO 5
GR.HIDE i
NEXT i
IF (kom$="вперёд") THEN
GR.SHOW 2
PAUSE 300
GR.HIDE 2
ENDIF
IF (kom$="назад") THEN
GR.SHOW 1
PAUSE 300
GR.HIDE 1
ENDIF
IF (kom$="влево") THEN
GR.SHOW 2
GR.SHOW 4
PAUSE 300
GR.HIDE 2
GR.HIDE 4
ENDIF
IF (kom$="вправо") THEN
GR.SHOW 2
GR.SHOW 5
PAUSE 300
GR.HIDE 2
GR.HIDE 5
ENDIF
IF (kom$="стоп") THEN GOTO qq
GR.BRIGHTNESS 0.1
GR.CLOSE
UNTIL 0
! ONERROR:
qq:
LET s$="программа закончила работу"
TTS.INIT
TTS.SPEAK s$
TTS.STOP
GR.BRIGHTNESS 0.1
GR.CLOSE
END В программе используется управление голосом как наиболее целесообразное в моем случае. Объект TTS преобразует текст в речь. Объект STT преобразует речь в текст. При работе STT обязательно должен быть включен Wi Fi, потому что записанная фонограмма отправляется на сервер в интернете, откуда приходит результат распознавания, это несколько слов, или фраз. Программа проверяет, есть ли команда в списке, выводит команду на экран и выполняет её. Если текст не распознан программа выводит сообщение об этом. Все это повторяется в бесконечном цикле. Завершение работы программы производится командой «стоп» или нажатием клавиши возврат. Геометрические размеры взяты относительными, чтобы автоматизировать привязку на разных экранах с разными размерами и разрешением, что не всегда получается. Круги, которые рисуются на экране, являются объектами и номеруются автоматически по мере их создания.
Команда GR.SHOW 2 — означает показать круг, который был создан вторым. Его номер содержится в n4. Можно было написать GR.SHOW n4. В строке IF (theText$=«вперед») THEN kom$=«вперёд» вы заметите различие в значениях величины в команде присваивания — «вперед» и «вперёд». Дело в том, что STT упорно возвращает «вперед», хотя бывают случаи «вперёд», тогда программа не распознает команду. От этого можно было избавиться, но я не стал усложнять программу, а просто поправил написание при выводе на экран. Еще бывают сбои при распознавании команды «влево». Впрочем, возможно это особенности моего произношения.
К сожалению, я не могу вставить сюда клип показывающий работу программы.
Посмотрите здесь.
Ссылки
Так как текста получилось овер-чем-дофига, основные ссылки повторю.
Прошивка rcboard-0.01.002.zip для Виртурилки
Дистрибутив Virt2real Player для Windows. То же самое, но не установщик а просто архивПод Win8 некорректно проверяет наличие DirectX, так что можно просто архив распаковать. Требуется .Net 4.5 и DirectX.
Описание прошлой версии РЦборды и Virt2real PlayerЕщё описание рцборды, старый протокол
Приложение для Android. Только локальное управление.Приложение для IOS, только локальное управление, нет обнаружения девайсов. Сейчас там старая версия, новая проходит аппрув.
P.S. Эхх, жаль Тачка Бонда не дожила до появления рцборды 🙁
Управление автомобилем с джойстика через arduino mega

Наверное, у каждого автовладельца иногда возникает желание управлять своей машиной на расстоянии. Например, передвинуть на другое место парковки, выглянув с балкона, или завести её в гараж, не вставая с дивана.
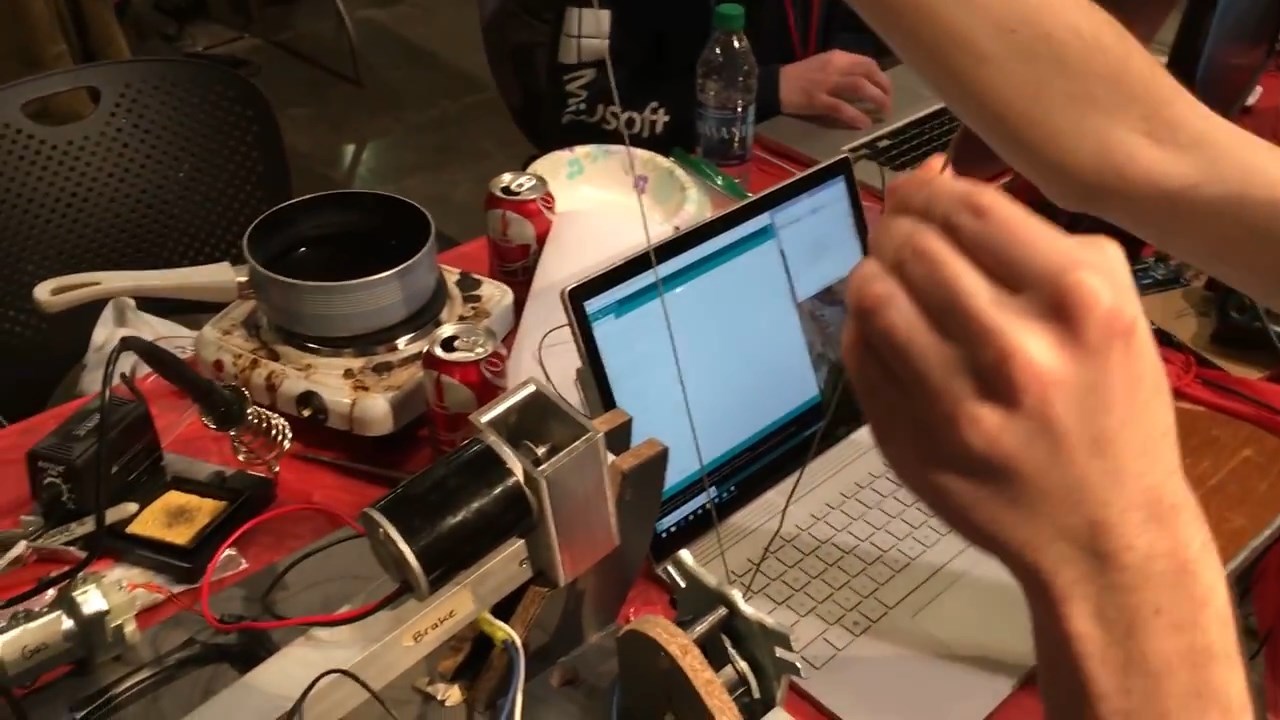
Студенты университета штата Огайо показали бюджетный вариант, как сделать «бортовой компьютер» на плате Arduino Mega. Управление машиной происходит с джойстика.
Четверо студентов Картер, Дейв, Райан и Шон собрали систему Д/У частично из подручных средств, во время 24-часового хакатона в университете. Её назвали MagiKarpet, потому что управляющий блок лежит на месте коврика.
Например, пластиковые соединения для крепления элементов слепили за час, вскипятив и размягчив полиморфный пластик (полиморфус).
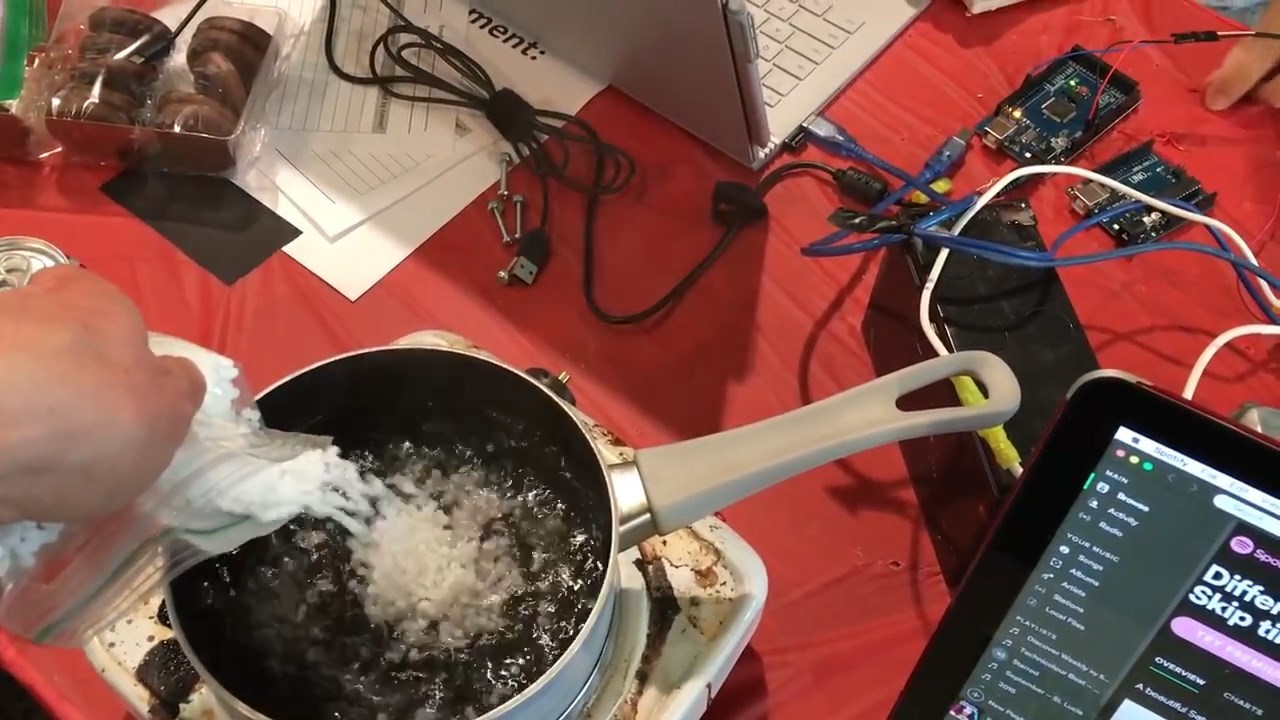

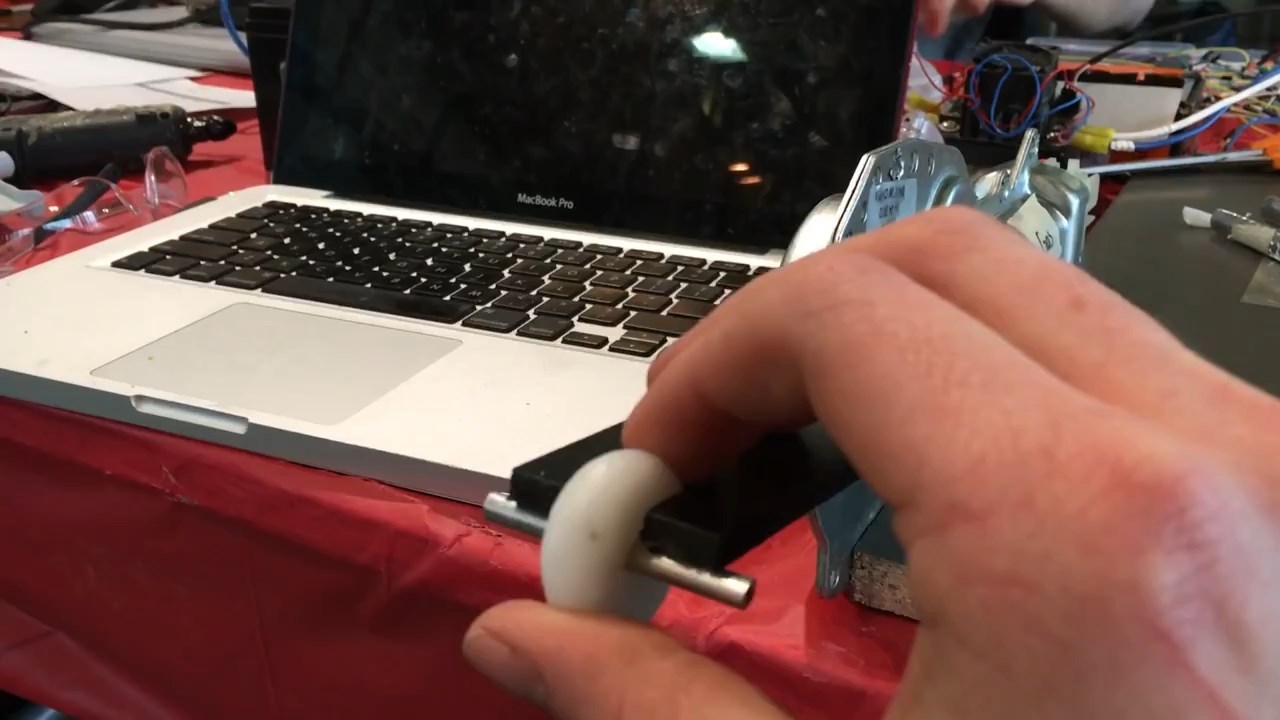
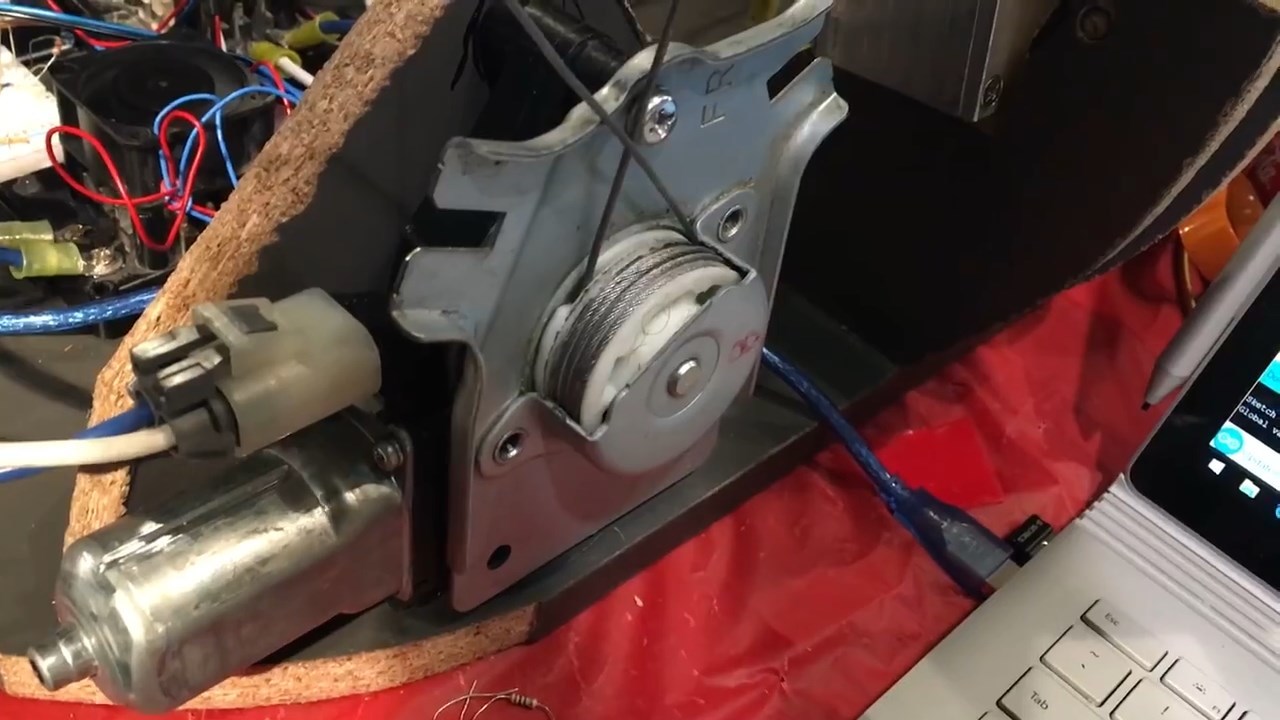
Для проекта взяли автомобиль Chevy Cobalt. Задача состояла в том, чтобы управлять педалями газа, тормоза и рулевым колесом прямо с геймпада. Один линейный привод управляет железной «ногой», которая давит на педаль газа.

Другой привод тянет тросы, прикреплённые к рулевому колесу, так что оно поворачивается на 90º в каждую сторону.

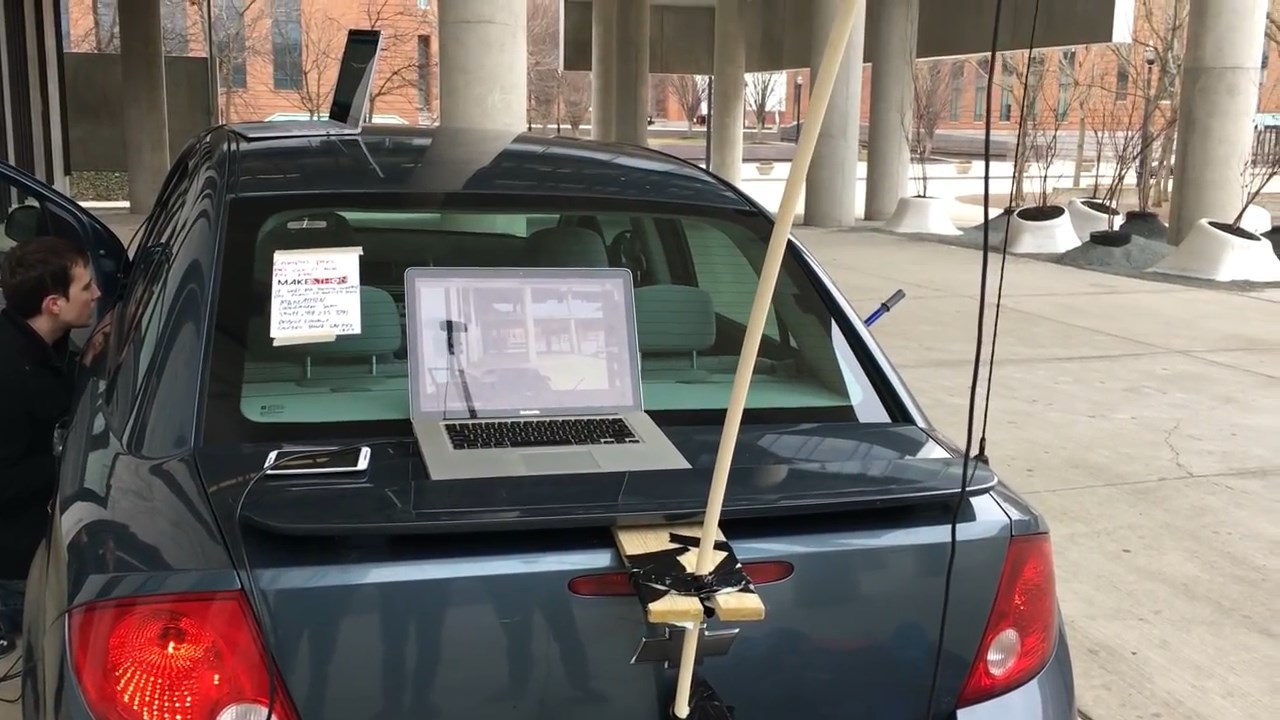
Для большего удовольствия студенты смонтировали камеру на багажнике, которая транслирует на монитор картинку движения автомобиля «от третьего лица», как в компьютерной игре.
В ходе работы возникли некоторые сложности. Сначала парни хотели использовать геймпад от игровой приставки Xbox, но тот глючил, так что пришлось заменить его на самодельный джойстик.
Судьи, которые принимали работы участников хакатона, категорически отказались разрешить демонстрацию во дворе университета (по причинам безопасности), так что управление с джойстика показывали в стационарном варианте, подняв машину на домкрате.
В итоге всё отлично получилось, но ребята заняли в хакатоне только второе место.

