

- Вводная информация про p2p режим
- Вторая жизнь радиоуправлемой машинки
- Как собрать радиоуправляемый автомобиль range rover
- Немного про задержку
- Общий принцип подключения моторов машинки
- Переделка rc-машинки в смарт-машинку при помощи ардуино
- Платы для радиоуправляемой машинки – купить в москве по выгодной цене
- Поэтапная инструкция
- Практическое руководство по сбору
- Проверка подключения виртурилки к сети
- Ценные рекомендации
Вводная информация про p2p режим
Так как для канала управления и для канала видео используется UDP — так и хотелось сделать полноценный P2P (Peer-to-peer) линк, чтоб не гонять видео от борта до сервера и обратно до клиента. Ну, раз хотелось — взял и сделал 🙂 Фактически, получился простой и лёгкий аналог адобовского RTMFP (не путать с RTMP). Только вот передачу звука добавить никак руки не дойдут, так что рцборда пока немая и глухая.
С UDP какая основная проблема — преодоление NAT. Так как на одном из концов линка (на передающей стороне или на приёмной) обязательно есть NAT — просто указать адрес и порт сервера (или клиента) не получится — NAT помешает. В виндовом Virt2real Player есть возможность с помощью UPnP сделать проброс порта, но это не совсем то чего я хотел.
А то что хотел — получилось только после вдумчивого курения технологии UDP Hole Punching. В итоге всё получилось как надо — неважно, какой роутер, неважно где клиент или сервер. Главное чтоб был выход в Интернет. Хотя вру, есть один единственный тип NAT, который пробить пока не удалось. Всё время забываю как он правильно называется, вроде бы симметричный NAT.
И да, обычные TURN и STUN серверы в рцборде не используются, только своя реализация. Как я обычно говорю: хочешь изучить технологию — сделай по своему, а потом сравни с общепринятыми решениями. Любители велосипедов меня поймут. Однако часто оказывается что велосипед не так уж плох и свои задачи выполняет лучше чем общепринятые решения.
Это так, лёгкий оффтоп был. Продолжаем про NAT. Поддержка P2P есть пока только в виндовом приложении Virt2real Player, в андроидное и айфонно-айпадное ещё не добавлял. Проверял работу с коннектом через свисток Yota, через свисток Beeline 4G, через точку доступа на смартфоне, который в инет выходил тоже через Beeline 4G.
Во всех этих случаях всё работает, но заметил что идеально только через Yota. Через билайн (в любом из опробованных видах) тоже работает, но коннект дольше времени занимает. Почему так происходит — пока не разбирался. Из печального — пока не удалось заставить работать линк (и команд, и видео) когда и клиент и сервер подключены через 4G свистки. Возможно, тут как раз симметричный NAT и подкрался.
Вторая жизнь радиоуправлемой машинки
 В давние-стародавние времена, 13 лет назад, была куплена радиоуправляемая машинка для себя любимого. В нее успели наиграться сыновья, а машинка была еще жива, но родной аккумулятор не выдержал пытки и почил с миром. Попытка его живить ни к ему не привела, осталось в нём емкости от 420 ма·ч где-то 50-70 ма·ч. Была предпринята попытка заменить его на Li-ion от ноутбуков, но электроника отказывалась нормально работать от 3,7 в и глючила страшно. Попытка поставить DC/DC до 5в. привела к судорожному дерганью ходового мотора, а напихать большой дроссель и конденсаторы по выходу DC/DC не было физически места.
В давние-стародавние времена, 13 лет назад, была куплена радиоуправляемая машинка для себя любимого. В нее успели наиграться сыновья, а машинка была еще жива, но родной аккумулятор не выдержал пытки и почил с миром. Попытка его живить ни к ему не привела, осталось в нём емкости от 420 ма·ч где-то 50-70 ма·ч. Была предпринята попытка заменить его на Li-ion от ноутбуков, но электроника отказывалась нормально работать от 3,7 в и глючила страшно. Попытка поставить DC/DC до 5в. привела к судорожному дерганью ходового мотора, а напихать большой дроссель и конденсаторы по выходу DC/DC не было физически места.
И было принято кардинальное решение: выкинуть всю электронику в машинке и пульте и заменить новой.
Пульт оказался полностью дискретным в части управления, мозгом там была вот с такой схемой включения:

Мозгом машинки (приемника) был собрат по несчастью со следующей схемой включения:

Покопавшись в загашниках, было решено использовать в качестве мозга , а для радиочасти , которых было множество в наличии для использования в умном доме. В пульте (передатчике) оставлялись к использованию кнопки (ползунки) которые управляют направлением движения машинки и траекторией.
Сервомашинки в приемнике были собраны по неведомой конструкции и представляли собой по сути редуктор с DC-мотором. Характеристики, которые удалось с них снять:
- Максимальный ток сервы на поворотные колеса 0.27 А при 3.5 в. Сопротивление сервы 17 Ом в неподвижном среднем положении, от 1 кОм до 150 Ом при выкрученных в сторону колесах.
- Ток ведущих колес на холостых оборотах 0.43 А при 3.5 в, под нагрузкой до 2.3 А и потом защита у акб срабатывает. Сопротивление на проводах ведущих колес 1.3 Ом, если их не трогать.
По размерам посадочного места в машинке (приемнике) не густо, максимальная высота платы с деталями 16 мм, но не по всей площади платы, т.к. есть дырки под крепление и ограничители по краям.
Что должно быть по функционалу:
- Движение вперед и назад с регулировкой скорости (ШИМ) или на первое время просто вкл/выкл
- Поворот в лево и вправо.
- Вкл/выкл фары спереди и габариты сзади
- Вкл/выкл проблесковых маячков из двух светодиодов на крыше машины (полицейская мигалка).
- Вкл/выкл гудка (пищалки) со звуком клаксона автомобиля.
{ads2}
Начнем с передатчика, т.к. с ним получилось проще всего, кроме не поместившейся в корпус платы.
Схема принципиальная:

Кнопки подключены по такой схеме только ради экономии места и возможности выхода микроконтроллера из powerdown при нажатии на любую кнопку. Совершенно не рекомендую такое решение, если питание не батарейное, или есть управление силовой нагрузкой, т.к. МК может ловить помехи от наводок по портам кнопок, и их нужно будет шунтировать резисторами и стабилитронами. По питанию в результате была оставлена батарейка типа «Крона» и поставлен LDO (на схеме не показан) с выключателем.
Алгоритм работы передатчика:
- Инициализировали перефирию
- Если нажата или отпущена одна из кнопок, то выходим из сна и отправляем в NRF состояние порта кнопок
- Если в течении 5 секунд кнопки не нажимают или отпускают, то уходим в Powerdown
- Раз в 5 секунд проверяем напряжение питания МК, если оно ниже 2.5в, то двукратно пищим
- Идем в пункт 2.
В результате пультик выглядит в разобранном виде так:

Слева плата управления, в центре старая плата, которую выпаивать не стал, ибо не мешала.
В будущем есть планы вырезать Крону и поставить 18650, но лень.
В целом с пультом проблем было очень мало, главный косяк, что плата получилась чуть толще, чем могла поместиться в пульт, хотя все размеры снимал по несколько раз. В результате в собранном виде у пульта есть слева щель и через нее видно плату и индикацию светодиодов на ней:

Кнопки на пульте имеют следующее назначение:

Остальные органы управления (вперед/назад, влево/вправо) остались без изменений.
Приемник.
Схема принципиальная:

Красным выделены элементы, которые пришлось добавлять уже после изготовления печатной платы на этапе наладки. Т.к. ходовой двигатель потреблял ток до 5 А легко, то от этого МК становилось плохо, и он перезагружался. Решается эта проблема добавленными элементами: VD1, L2, C10, L3, C9. Перечисленные элементы установлены навесным монтажом.
VD2, V3, R21, R22 реализуют ШИМ-управление ходовым двигателем. Дело в том, что если этого не сделать, машина превращается в адский скоростной болид, соответственно редуктор или корпус машины просто развалятся после столкновения с препятствиями или от времени. Без ШИМ реализован Турбо режим, если одновременно нажать Фара Мигалка Гудок, таким же нажатием он и отключается.
В разобранном виде обновленная машинка выглядит так:

Места у неё в нутре совсем не много:

Плата управления двухэтажная (из двух плат), на второй реализован H-мост по управлению ходовым двигателем:


 Следует отдельно описать работы с NRF, т.к. было много времени потрачено на превращение готовой библиотеки, найденой интернетах, в рабочий вариант.
Следует отдельно описать работы с NRF, т.к. было много времени потрачено на превращение готовой библиотеки, найденой интернетах, в рабочий вариант.
Главной проблемой были дубликаты получаемых комманд, виной тому была неправильная обработка принятой команды на приемнике, не правильно было так:
- Ждем от NRF поднятия флага RX_DR, входим в обработчик приема;
- Выгребаем из буфера приема команду, отправляем ее на обработку;
- Сбрасываем флаг RX_DR.
Это в корне не верно, т.к. флаг RX_DR говорит только о факте принятия данных буфер, но команд может прийти несколько (всего буфер NRF рассчитан на 3 команды).
Правильный алгоритм такой:
- Ждем от NRF поднятия флага RX_DR, входим в обработчик приема;
- Выгребаем из буфера приема команду, отправляем ее на обработку;
- Проверяем есть ли еще принятые команды по флагу RX_P_NO, если есть, то переходим к п2;
- Сбрасываем флаг RX_DR.
Инициализация NRF используется следующая (от NRF нужна дальность, но не скорость):
{code}#define SETUP_AW_5BYTES_ADDRESS (3 << AW)
#define SETUP_RETR_DELAY_1500MKS (5 << ARD)
#define SETUP_RETR_UP_TO_5_RETRANSMIT (5 << ARC)
#define RF_SETUP_250KBPS (1 << RF_DR_LOW)
#define RF_SETUP_0DBM (3 << RF_PWR)
#define mirf_CH 10 //transmission channel
#define mirf_PAYLOAD 0 //payload lenght
mirf_write_register(EN_AA,(1<mirf_write_register(EN_RXADDR, (1 << ERX_P0) | (1 << ERX_P1)); // включение каналов 0 и 1
mirf_write_register(SETUP_AW, SETUP_AW_5BYTES_ADDRESS); // выбор длины адреса 5 байт
mirf_write_register(SETUP_RETR, SETUP_RETR_DELAY_1500MKS | SETUP_RETR_UP_TO_5_RETRANSMIT); // задаем ждать подтверждение от принимающего 1,500мс и пять попыткот нас до него достучаться
mirf_write_register(RF_SETUP, RF_SETUP_250KBPS | RF_SETUP_0DBM); // выбор скорости 250 кбит/с и мощности 0dBm
mirf_write_register(RF_CH, mirf_CH); // задаем канал преима/передачи
if (mirf_PAYLOAD!=0){
// настраиваем отправку данных фиксированной длинны
mirf_write_register(RX_PW_P0, mirf_PAYLOAD); //length of incoming payload
mirf_write_register(FEATURE,(0 << EN_DPL) | (1<}else{
// настраиваем отправку данных произвольной длинны с автоподтверждением
mirf_write_register(FEATURE,(1 << EN_DPL) | (1<mirf_write_register(DYNPD, (1 << DPL_P0)); // включение произвольной длины для канала 0
}
mirf_write_register(CONFIG, (1 << EN_CRC) | (1 << CRCO) | (1 << PWR_UP) | (1 << PRIM_RX)); // Включение CRC, питания и переход на прием
mirf_setRX; // rx mode
_delay_ms(20);
mirf_CE_hi;{/code}
Машинка в сборе выглядит так:



Немножко видео о том, что вышло в итоге:
Что можно еще улучшить:
- Поставить в разрых питания H-моста полевик, чтобы снизить потребление приемника. Сейчас во схе вся схема потребяется 13ма, все это жрет именно H-мост для ходового двигателя.
- Переделать плату в пульте (передатчик), чтобы он закрывался плотно.
- Сделать задние стоп-сигналы, запаралелить их с фарами.
Использовались следующие ссылки по теме:
http://aterlux.ru/index.php?page=article&art=nrf24l01p#COMMANDS
https://openservo.org/Schematic2?action=AttachFile&do=view&target=openservo_2.1_schematic.pdf
http://kazus.ru/forums/showthread.php?p=1093653#post1093653
Как собрать радиоуправляемый автомобиль range rover
Моделировать автомобили по собственному желанию – это увлекательное хобби, особенно, когда результат превышает все ожидания. Для начала нужно приобрести стендовую модель Range Rover, из нее мы будем делать джип, свободно рассекающий по бездорожью. Еще нужно взять рабочую электронику от старого джипа, ее мы будем фиксировать во внедорожник.
Из медных труб паяльником мастерим мосты и дифференциалы. Его мы крепим к мощным колесам внедорожника. Нужно следить за тем, чтобы все соединения были прочно запаяны. Закрыли мы точащие дифференциалы крышечками от таблеток. Сверху покрываем все место стыка дифференциала обычной автоэмалью.
Ставим мосты на раму и выполняем рулевые тяги. Рулевые тяги можно взять у старой разобранной машинки. После установки пластикового дна вырезаем там отверстие, необходимое для установки редуктора, карданных валов. В редукторе стоит двигатель от самолетика, также достаточно мощный.
Модель двигается не рывками, а плавно, это самое главное условие для таких моделей. Делать редуктор достаточно сложно, но тут можно проявить всю свою смекалку. Редуктор плотно зафиксируем к днищу, крепим днище к раме. Теперь идет установка электроники, амортизаторов, аккумулятора.
В конце идет покраска корпуса авто, установка основных узлов, фары и многое другое. Краску наносим в 4 слоя для обычного пластика. Автор нашел оригинальное фото машины и сделал ее мини-копию в игрушечном варианте. Чтобы модель не боялась влаги, электронику он покрыл специальным составом.
Немного про задержку
Главное требование к дистанционному управлению одно — как можно меньшая задержка от нажатия кнопки или перемещения джойстика до соответствующего изменения отображаемой с борта устройства картинки в видеопотоке. Когда публикуешь что-нибудь на тему удалённого управления обычно первый вопрос — «какая задержка?».
После многочисленных испытаний оказалось что задержки — штука субьективная и на комфортность управления влияет по разному. Само собой, всё зависит от максимальной скорости ездящего девайса. Для летающих девайсов (самолёты/коптеры) минимальность задержки очень важна, а вот при управлении ездящими устройствами — не всегда.
Когда я на очередной выставке Хобби-экспо рассекал по залу на переделанной радиоуправляемой багги, через десять минут руления поймал себя на мысли что задержка (какая бы она ни была) перестаёт ощущаться, начинаешь управлять «на упреждение». На почти половине скорости (а багги моя до 80 км/ч может разгоняться) спокойно гонял по залу, лавируя между павильонами, стульями, людьми.
Так что тут, скорее, важна стабильность задержки, а не её абсолютное значение в миллисекундах. Минимальная достигнутая задержка при коннекте к обычному роутеру через обычный Wi-Fi свисток была где-то в районе 200 мс, а при коннекте через общепризнанный эталон — мощные роутеры фирмы Ubiquity минимальная задержка при уверенном коннекте — около 100 мс.
Когда я управлял довольно скоростной багги в Шеньчжене, сидя дома в Москве, довольно комфортно было рулить, хотя только сетевой пинг от меня до сервера китайского 4G оператора был около 300 мс. Плюс ещё 100 мс наши — итого под полсекунды набегает. Однако отлично покатался 🙂
Общий принцип подключения моторов машинки
Обычно у RC машинки два мотора. Один обычный, коллекторный — крутит колёса. Второй — сервомотор, поворачивает передние колёса в нужную сторону. Т.е. получается что требуется всего два канала управления — газ и руль. Изначально (если машинка куплена в собранном виде) все каналы подключены к штатному радиоприёмнику трёхпиновыми разъёмами типа JR (стандартный серворазъём). Чёрный (или коричневый) провод — земля, красный — питание (5-6В), жёлтый (или белый, или оранжевый) — сигнальный провод.
Именно по сигнальному проводу мы и будем управлять моторами, но сначала надо подать питание на серву, которая рулит колёсами. Тут общий принцип такой — с бортового аккумулятора силовое питание с напряжением, равным напряжению аккумулятора, идёт по толстым проводам на мощный регулятор коллекторного (или бесколлекторного) мотора.
Внутри этого регулятора есть так называемый BEC — преобразователь напряжения, делающий из различного аккумуляторного напряжения стабильные 5 Вольт (иногда 6В, можно выбирать перемычкой на регуляторе), требуемые для питания бортовых сервомашинок, приёмника и различной другой электроники. Это стабилизированное питание обычно рассчитано на нагрузку не более чем 2-3А, хотя это тоже зависит от модели регулятора.
Выходное напряжение BEC по чёрному и красному проводам тонкого трёхжильного шлейфа от регулятора подаётся на приёмник. Здесь таится главный нюанс, который не все сразу осмысливают. Повторюсь — от регулятора идёт кабель с тремя жилами. Из них две жилы это питание, которое выдаётся с регулятора, т.е. это выход.
В приёмнике есть несколько групп трёхпиновых контактов. Их количество зависит от количества каналов, на которое приёмник рассчитан. У машинок обычно 2 или 3 канала, так что групп, соответственно, 3 или 4 (одна группа для установки перемычки Pair (сигнал на спаривание приёмника и передатчика).
У этих групп контактов все пины питания замкнуты между собой, т.е. земля и питание приходят с регулятора и подаётся сразу на все группы контактов. А вот сигнальные пины все независимые, на них выдаётся сигнал, принятый приёмником с радиоаппаратуры управления.
Так как управлять мы будем с помощью независимого контроллера, родной приёмник машинки нам не нужен, убираем его вообще. А трёхжильные шлейфы от регулятора и от сервомашинки нам необходимо соединить хитрым образом — чёрный провод соединить с чёрным, красный — с красным.
А оставшиеся белые (жёлтые или оранжевые) два проводка надо подключить к Виртурилке, а именно к пинам CON44 и CON43, см. схему . Какой именно провод к какому пину особо значения не имеет, так как каналы можно настроить потом в конфиге рцборды.
Должно получиться примерно такое подключение
Если под рукой есть сервоудлинители — удобно сделать подключение с их помощью. У меня с ними вечный напряг, так что я просто обрезаю проводки и кручиваю-спаиваю.
И да, самое главное — питание на Виртурилку подаём прямо с контактов аккумулятора. Ей нестрашно напряжение вплоть до 20В, так что чем выше напряжение — тем лучше, ток меньший будет потреблять. КПД преобразователя питания (SEPIC, установлен на самой Виртурилке) падает только после 15В, так что идеальное питание — от 12 до 15 В, при этом в полной нагрузке (с вифи)
Переделка rc-машинки в смарт-машинку при помощи ардуино
Во многих проектах на ардуино предлагается сделать то же самое, что продается в магазинах, но с гораздо большими трудовыми и материальными затратами. Сегодняшний проект не такой, смарт-машинки продаются в магазинах, но стоят в среднем раз в 5 дороже, чем RC-машинки. Поэтому я решил поделиться, как можно переделать практически любую RC-машинку в модную нынче машинку с приставкой «смарт» при помощи ардуино. Вот демо видео того, что получилось в итоге:
Итак, переделывать я решил стандартную RC-машинку, купленную в магазине игрушек примерно за 500 рублей.

Переделку можно осуществить двумя основными способами:
1. Подключить ардуино к пульту ДУ от машинки
2. «Вживить» ардуино внутрь самой машинки
Я решил попробовать оба способа, но сегодня расскажу только про первый, поскольку он несколько проще, а начинать лучше с простого.
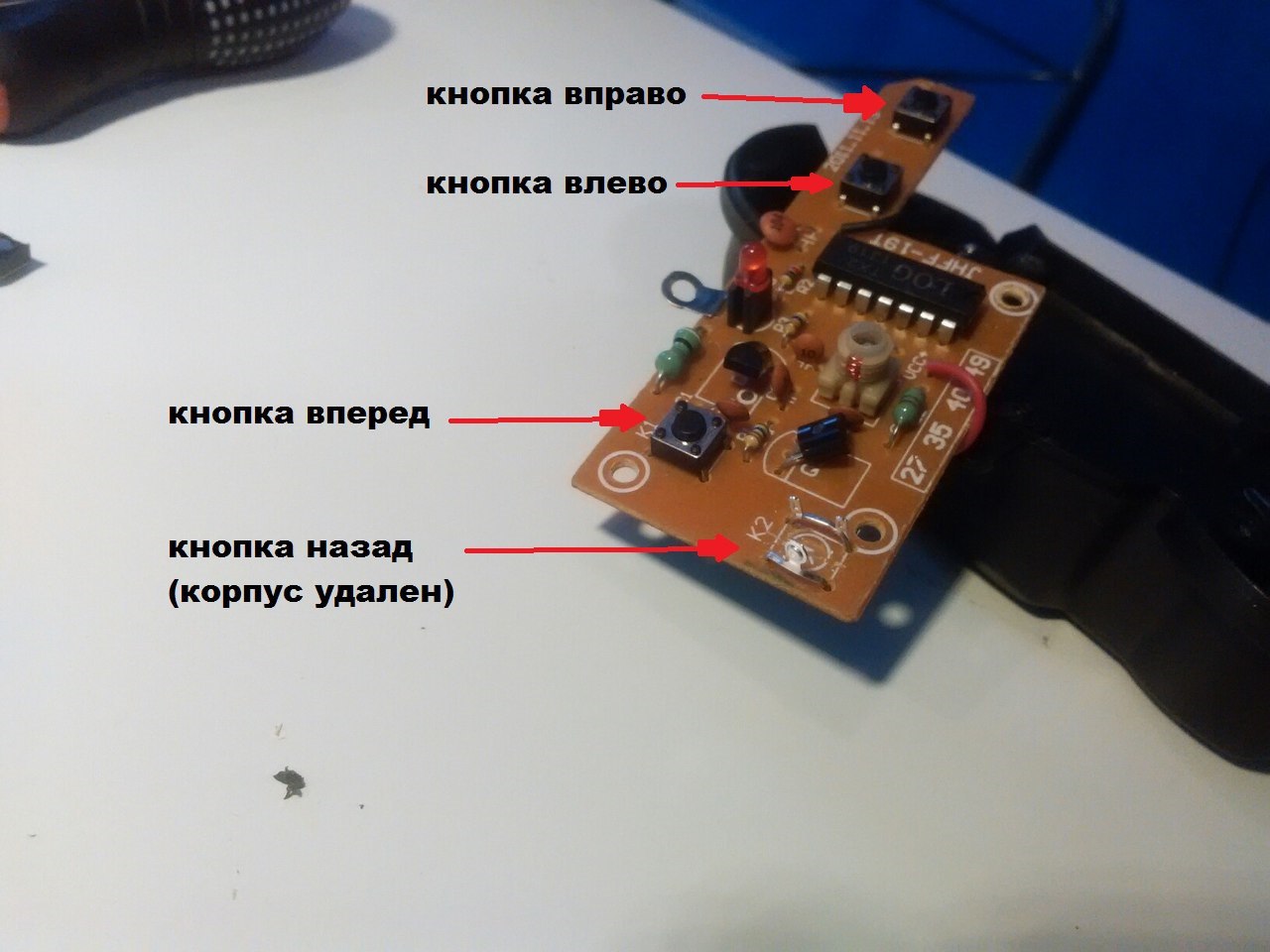
Чтобы подключиться к пульту ДУ, его нужно сначала разобрать и удалить те 4 кнопки, которые отвечают за движения вперед-назад и повороты вправо-влево. Можно их отпаять, а можно просто сломать корпус кнопок, оставив только контакты.
Вместо четырех кнопок подключаем четырехканальный блок реле по схеме:
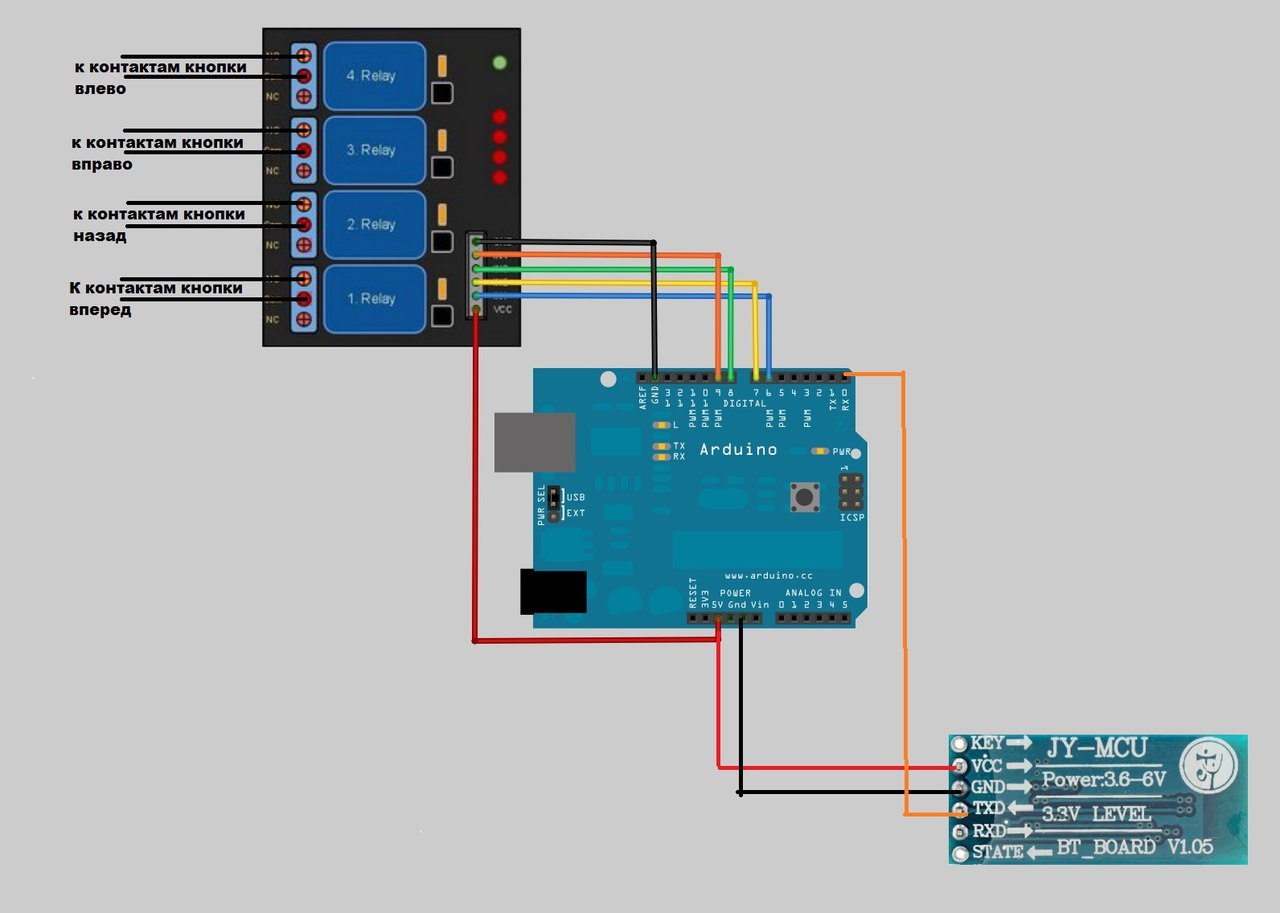
Блок реле подключаем к ардуино, а она уже будет получать сигналы со смартфона посредством блютуз модуля. Скетч для ардуино
unsigned long incomingByte;
int LED2 = 6;
int LED3 = 7;
int LED4 = 8;
int LED5 = 9;
void setup() {
Serial.begin(9600);
Serial.setTimeout(4);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
}
void loop() {
if (Serial.available() > 0) {
incomingByte = Serial.parseInt();
if(incomingByte == 2) {digitalWrite(LED2, LOW); }
if(incomingByte == 3) {digitalWrite(LED3, LOW);digitalWrite(LED2, LOW); }
if(incomingByte == 4) {digitalWrite(LED4, LOW); }
if(incomingByte == 5) {digitalWrite(LED5, LOW); digitalWrite(LED2, LOW);}
if(incomingByte == 18) {digitalWrite(LED2, HIGH); }
if(incomingByte == 18) {digitalWrite(LED3, HIGH); }
if(incomingByte == 18) {digitalWrite(LED4, HIGH); }
if(incomingByte == 18) {digitalWrite(LED5, HIGH); }
}
}
Теперь нужно сделать простенькое приложение для управления всем этим на подобии этого:

Приложение я сделал в среде визуальной разработки андроид приложений App Inventor 2.
Выглядит оно приложение так:
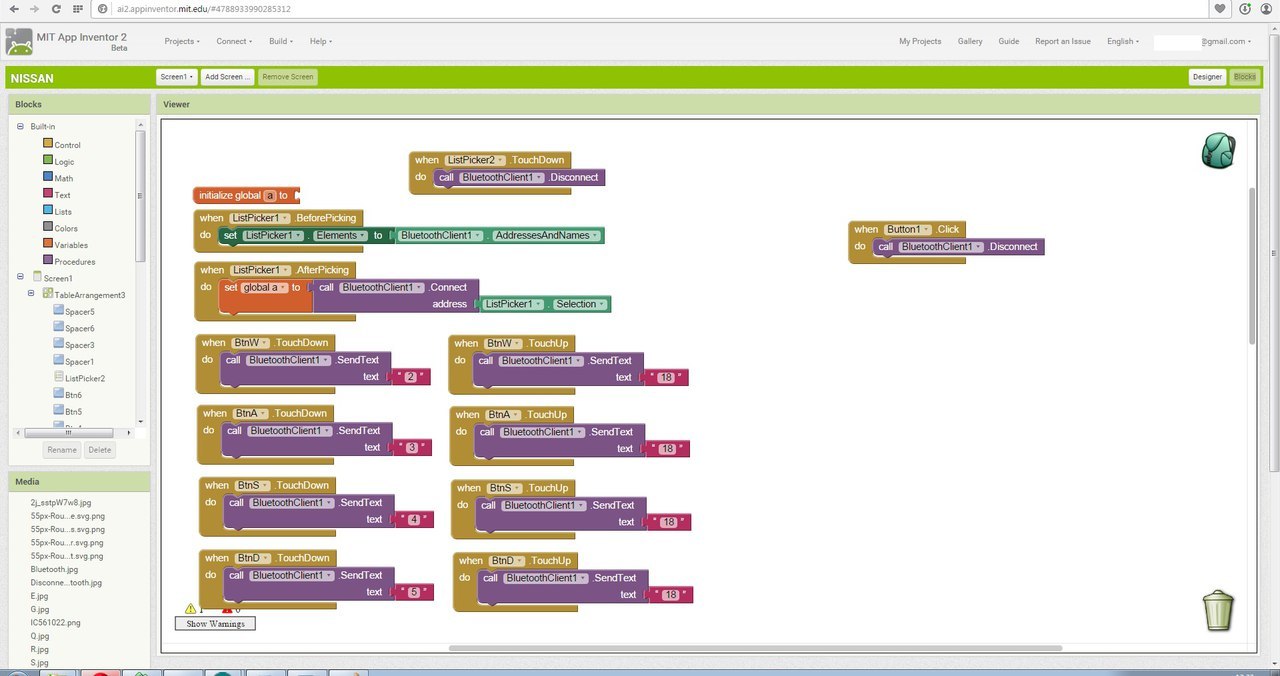
Логика у приложения очень простая: при касании пальцем кнопки оно отправляет сигнал на ардуино замкнуть соответствующее реле. При отпускании кнопки отсылается команда разомкнуть все реле. Скачать приложение можно тут, исходник тут, но если у кого-то есть полчаса-час лишнего времени, то можно сделать такое приложение «с нуля». На эту тему я снял отдельное видео, где подробно рассказываю что и как делать для тех, кто сталкивается с этой средой разработки в первый раз.
Ну и в конце фото того, как эта схема управления выглядит. Упаковывать все это в коробку не стал, поскольку в планах есть внедрение ардуино непосредственно в корпус этой машинки.

P.S. Сборник из более 100 обучающих материалов по ардуино для начинающих и профи тут
P.P.S. Онлайн курс по ардуино на гиктаймс здесь.
Платы для радиоуправляемой машинки – купить в москве по выгодной цене
тип: гоночная машина, тематика: гоночные автомобили, питание: съемный аккумулятор”>Машинка детская на радиоуправлении “для дрифта” ТМ AUTODRIVE, М 1:24, 4 канала, свет, сменные шины, на пульте управления, с зарядным устройством, синий, в/к 24,1х10,3х23,7см тип: гоночная машина, тематика: гоночные автомобили, питание: съемный аккумулятор
2400 руб.
Доставка: Москва
§
тип: грузовик, тематика: военная техника, питание: от аккумулятора”>Машинка на радиоуправлении Грузовик, спецтехника, военный грузовик, 27 MHz, М1:20, пульт управления, 4 канала, для мальчиков тип: грузовик, тематика: военная техника, питание: от аккумулятора
1150 руб.
Доставка: Москва
Поэтапная инструкция
Оптимальный вариант – заняться сборкой радиоуправляемой модели. Здесь потребуются определенные навыки и знания мелкой электротехники, ведь эта мини-машинка представляет собой достаточно сложный механизм, несмотря на компактные размеры. Необходимо приобрести все важные детали.
Начинаем изучать пульт управления. От правильной сборки напрямую зависит движение авто, способность преодоления препятствий, делать красивые маневры. Многие автомоделисты применяют трехканальный пульт пистолетного вида, собрать который можно самостоятельно.
Можно пойти по простому пути – обзавестись специальным конструктором, где в комплекте содержатся все необходимые детали, их подробные схемы и конечные рисунки готовых моделей.
Двигатели для будущих радиоуправляемых моделей могут быть электрическими либо внутреннего сгорания. Двигатели внутреннего сгорания выпускают бензиновые либо калильные, функционирующие на составе из метанола, масла и нитрометана, специальной газоспиртовой смеси. Примерные объемы таких двигателей колеблются в пределах от 15 до 35 см3.
Примерный объем топливного бака у таких машин составляет 700 см3. Он обеспечивает двигателю бесперебойную работу в течение 45 минут. Многие бензиновые модели имеют задний привод, на них монтируется независимая подвеска.
Сегодня в продаже имеется множество разборных моделей, предназначенных для автомоделистов. Среди ведущих производителей мини-машинок стоит выделить АВС, Protech, FG Modelsport (Германия), HPI, HIMOTO (США). Их главной особенностью является схожесть мини-моделей с реальными прототипами.
Практическое руководство по сбору
Бесспорно, у самостоятельного сбора машинки на пульте имеется масса выигрышных преимуществ, а именно:
- Экономия средств, при этом вы будете иметь ту модель машинки, которую вы хотели;
- Вы можете сами выбрать нужную модель из предложенного ассортимента запчастей и разновидностей кузовов;
- Вы решаете – сделать мини-машинку на проводном пульте, либо воспользоваться радиоуправлением, на которое придется потратить большую сумму.
После того как вы определитесь с моделью, выполните следующий алгоритм действий:
- Подбираем шасси для своей модели, обратите внимание на качестве всех мелких деталей. Никаких вкраплений и зазубрин на поверхности пластика не должно быть видно, передние колеса должны двигаться плавно;
- При подборе колес особое внимание уделяйте моделям с резиной, поскольку полностью пластмассовые модели имеют сцепкую поверхность низкого качества;
- К выбору мотора подойдите со всей серьезностью, поскольку это главное сердце мини-машинки. Существуют 2 разновидности мини-моторчиков для машинок – электрические и бензиновые. Электрические моторы отличаются доступностью и простотой использования, они подпитываются от аккумулятора, ему очень легко давать новый заряд. Бензиновые варианты обладают большей мощностью, но они более дорогостоящие, требуют деликатного ухода. В них нужно вливать специальное топливо. Новичкам в сфере моделирования игрушечных машинок подойдут электромоторы;
- Нужно определиться с разновидностью управления – проводное либо беспроводное. Проводное управление стоит дешевле, но машинка будет двигаться только в ограниченном радиусе, в то время как радиоуправляемая модель будет двигаться в пределах досягаемости антенны. Радиоблок гораздо эффективнее для мини-машинок;
- Корпус будущей машины также заслуживает повышенного внимания. Вы можете выбрать готовый корпус либо сделать по личному эскизу.
После того как все детали куплены можно приступать к сборке.
Проверка подключения виртурилки к сети
- В процессе загрузки Виртурилки на ней будут загораться светодиоды. При включении питания, если загрузочная флешка успешно прочиталась, загорится зелёный светодиод. Затем, в процессе загрузке ядра загорится синий светодиод. После полной загрузки если подключение к Wi-Fi сети прошло удачно — загорится красный светодиод. А когда запустится рцборда (она прописана в автозапуске) все светодиоды погаснут красный светодиод начнёт моргать).
- Устанавливаем приложение для управления. Оно называется Virt2real Player и есть для Windows (дистрибутив или zip-архив), для Android, для IOS. Приложение для IOS в аппсторе ещё старой версии, новая проходит аппрув, так что пока ставить его бестолку — управление работать будет коряво.
- Открываем Проводник (если на компе винда), если Виртурилка успешно подключилась к локальной сети по вайфаю — в разделе «Сеть» должно появиться устройство «RCboard (Virt2real)». В админку можно попасть, нажав правой кнопкой мыши на этом устройстве и выбрав пункт меню «Просмотр веб-страницы устройства»
- Запускаем Virt2real Player для Windows или для Android, должен обнаружиться сервер RCboard. Обнаружение сервера в приложении под IOS пока не реализовано.
Ценные рекомендации
Сборка новой уникальной машинки – увлекательный процесс, за которым могут провести не один вечер папа и сынишка. Чтобы превратить его в продуктивное дело, можно последовать следующим рекомендациям, их нужно учесть при сборке современной игрушки:
- Сделайте эскиз будущей модели, которую вы хотите собрать либо воспользуйтесь готовой инструкцией по сбору;
- Приобретите все качественные детали машинки;
- Дополнительные детали можно взять у старых машинок либо приобрести новые;
- Перед установкой тщательно протестируйте выбранный моторчик, это сердце машинки;
- Не экономьте на батарейках для новой модели, пусть они будут новыми и неиспользованными;
- Прочно фиксируйте все детали, согласно их последовательности;
- Изучите схемы создания аналогичных машинок заранее, чтобы облегчить процесс сборки;
- Выберите готовую модель либо придумайте что-то свое, уникальное.
Следуя этим рекомендациям, вы со своим чадом легко смастерите выбранную модель машинки. Можно мастерить и коллекционировать точные копии оригинальных авто, когда вы достигнете определенного уровня мастерства. Собирать вместе машинку в семейном кругу, – вот наилучший способ эффективной организации досуга для себя и своего ребенка.
Машинка, собранная своими руками, будет ценным презентом для своих детей, ведь в нее вложены настоящие отцовские чувства. В собранном виде модель будет ездить в выбранном направлении и легко маневрировать. Вы сможете научиться делать простой вариант машинки, следуя рекомендациям из предложенного видео. Начните свой путь в мире автомоделирования!