

- Что такое квадрокоптер и для чего это надо
- Введение
- Failsafe
- Low pass
- Pid controller
- Rpm filter
- Безопасность
- Бортовой компьютер и сенсоры
- Безопасность
- Другие способы перехвата дронов
- Как управлять квадрокоптером?
- Моторы
- Моторы и пропеллеры
- Питание и контроллеры питания
- Получение разрешения на полеты бпла через мфц (обновление от 5.04.2023)
- Режимы
- Режимы полёта дрона
- Рекомендации: проверка безопасности
- Текстовая выдержка
- Теория полета
- Управление
- Учимся управлять квадрокоптером быстро, безопасно и бюджетно
- Электронные пушки
Что такое квадрокоптер и для чего это надо
Мультироторы, они же мультикоптеры или просто коптеры, — это беспилотные летательные аппараты, предназначенные для развлечения, съемки фото и видео с воздуха или отработки автоматизированных систем.
Коптеры обычно различают по числу используемых моторов — начиная от бикоптера с двумя моторами (как GunShip из фильма «Аватар») и заканчивая октакоптером с восемью. На самом деле число моторов ограничено только твоей фантазией, бюджетом и возможностями полетного контроллера.
Классическим вариантом является квадрокоптер с четырьмя моторами, расположенными на перекрещивающихся лучах. Такую конфигурацию еще в 1920 году попытался соорудить француз Этьен Омишен (Étienne Oehmichen), и в 1922 году у него это даже получилось. По сути, это самый простой и дешевый вариант сделать летательный аппарат, способный без особых проблем поднимать в воздух небольшие камеры вроде GoPro.
Введение
Количество людей, которые решили освоить управление дроном и в целом заинтересовались этим хобби, с каждым годом растет в арифметической прогрессии по всему миру. 2023-й год не стал исключением и с наступлением нового года, самым часто задаваемым запросом в поисковых системах инета стал вопрос:
Перед тем как начать раскрывать тему о безопасном пилотировании, стоит отметить следующее, что людей, которые с первого раза смогли освоить управление дроном, нет. Каждый, кто впервые пришел в это хобби, начинает с неуклюжих полётов и ошибок свойственных новичку и как правило у всех они в основном одинаковы.
Данная статья является первоначальным кратким руководством, ориентированным на новичков, желающих научиться правильно и безопасно пилотировать дроном.
Failsafe
Режим сохранения, то есть, то, что будет делать квадрокоптер, если он потеряет связь с пультом управления.
Здесь есть 2 режима:
- Падение;
- Приземление;
- GPS спасение.
- Падение — если выбрать этот режим, то через секунду (настраивается в поле «Failsafe при низком значении газа, где стоит цифра 100) после потери сигнала, дрон отключит все двигатели и упадет.
- Приземление — при потере сигнала будет плавно приземляться, двигатели будут работать. Режим достаточно опасный, к тому же, нужно хорошо настроить обороты двигателей.
- GPS спасение — если вы установили на свой квадрокоптер GPS-модуль, то с его помощью можно настроить возврат квадрокоптера.
Если кратко, функция экстренная и созданная с целью вернуть управления квадрокоптером, а не его посадить, потому что нет дополнительных датчиков. Функция сработает, если вы улетите на расстояние не менее 50 метров (если не ошибаемся, то минимум можно установить 30 метров от точки взлета). Сажать дрон с помощью данного модуля не советуем, так как он ударит дрон о землю (нет других датчиков).
Вся задача модуля — в случае потери связи или, если вы засомневались в своих силах управления на дальнем расстоянии, активируете функцию GPS Rescue (либо она автоматически активируется), дрон поднимется на определенную высоту и полетит в ПРИМЕРНУЮ точку взлета. Главное, чтобы вы смогли перехватить управления на себя и не потерять/разбить дрон.
Обычно включают режим «Падение», так как с «Приземлением» непонятно где он будет приземляться с работающими винтами, а вдруг там будут люди?
Но если выбрали «Приземление», нужно настроить скорость вращения моторов, которые позволят плавно ему спускаться.
Блок «Failsafe переключатель» выполнит действие при активации тумблера, который присваивается функции на вкладке «Режимы». ПРи активации тумблера, выполнится сценарий Этапа 2.
Low pass
Фильтры
Как показывает предыдущий график — сигнал от гироскопа содержит информацию от 0 Гц до 1000 Гц, но нас интересует только диапазон 0-80 Гц, поскольку это фактическое движение квадрокоптера, о котором должен знать PID-контроллер. Таким образом, нам нужно решение для фильтрации, чтобы позволить низким частотам проходить через PID-контроллер, в то же время ослабляя высокие частоты, и для этого мы можем использовать фильтр Low Pass (Низких частот).
Фильтры нижних частот пропускают низкочастотный сигнал и ослабляют высокие частоты, которые в основном являются просто шумом.
Устанавливается частота среза, и контроллер просто уменьшает сигналы выше этой частоты. Кривая затухания позволяет не срезать все под чистую, а чем выше частота шума, тем сильней происходит его затухание, плавно.
Часто пилоты допускают ошибку устанавливая такой фильтр на той же частоте, что и видимый шум. Например на 200Hz. Поскольку фильтр плавно ослабляет шум, установка такого фильтра не даст особого результата. Фильтр стоит устанавливать на более низкие частоты. Возможно, даже на 80Hz.
Чем ниже вы устанавливаете такой фильтр, тем больше фильтрации происходит
Устанавливая фильтрацию, следует помнить об одной простой вещи. Чем больше фильтрации тем больше задержка. Понятное дело, что она в миллисекундах и не значительная, но для PID-контроллера это критично. Так как он начнет реагировать на события позже, а это значит, что он будет пытаться выровнять квадракоптер в прошлом 🙂
Pid controller
PID Controller — это такая система которая корректирует позицию квадрокоптера согласно стикам (вашему управлению) или заданного положения (ну, что бы его не колбасило). PID настраивается за счет 3х параметров — P, I и D. К сожалению в этой статье мы не будем детально рассматривать настройку PID. Если вы пилот, то уже знаете, а если новичок, но на эту тему будет отдельная статья.
Эта система хорошо работает, когда количество шумов минимальна, иначе мы можем столкнуться с такими проблемами как осцилляция (вибрации) или перегрев моторов.
D term в PID контроллере имеет особенно отношение к шуму. D сглаживает быстрые движения, но вычисление D в PID контроллере значительно усиливает шум в сигнале. Это означает, что шум от гироскопа существенно усиливается значением D term и поэтому мы фильтруем в двух местах — гироскоп и D.
В качестве примера такого приумножения покажу вам такие вот логи:Первый график — гироскопВторой график — PIDТретий — моторы
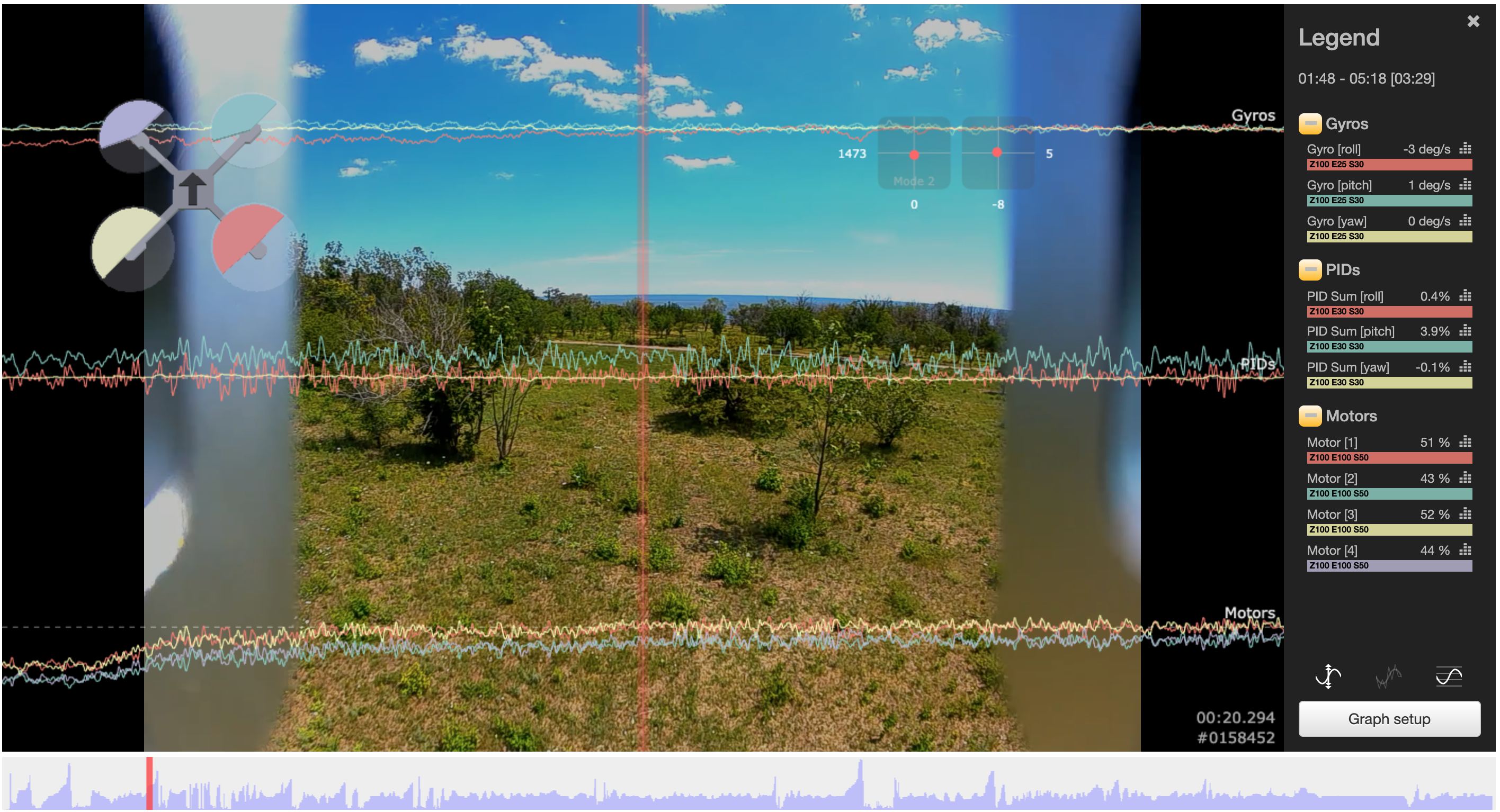
(это нормальные пропеллеры, с немного уменьшенной фильтрацией)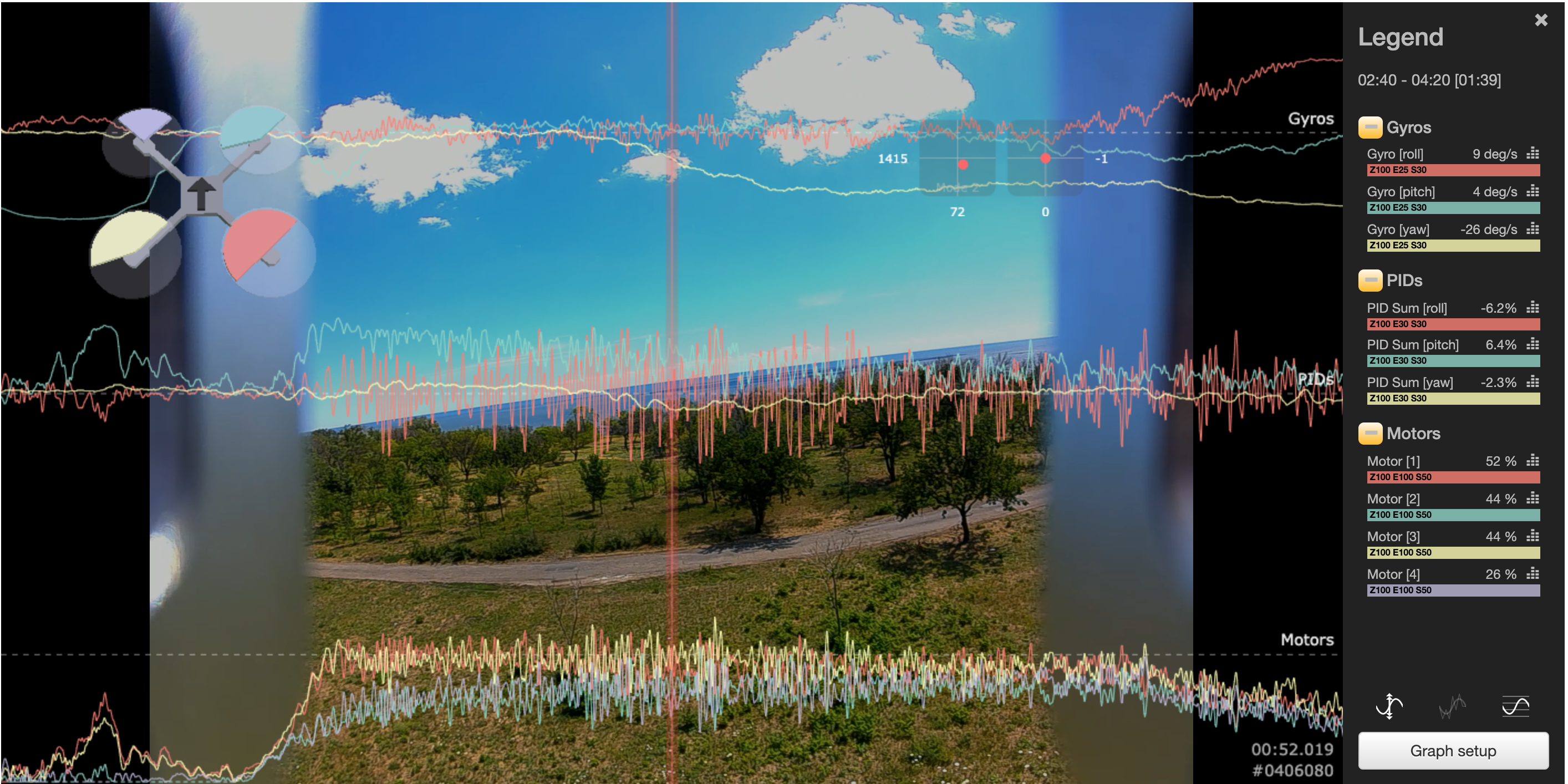
(Как видите вибрации от плохих пропеллеров усиливаются на этапе PID контроллера, что ведет к излишнему напрягу моторов, их буквально колбасит)
Скрины из — Blackbox Explorer.
Rpm filter
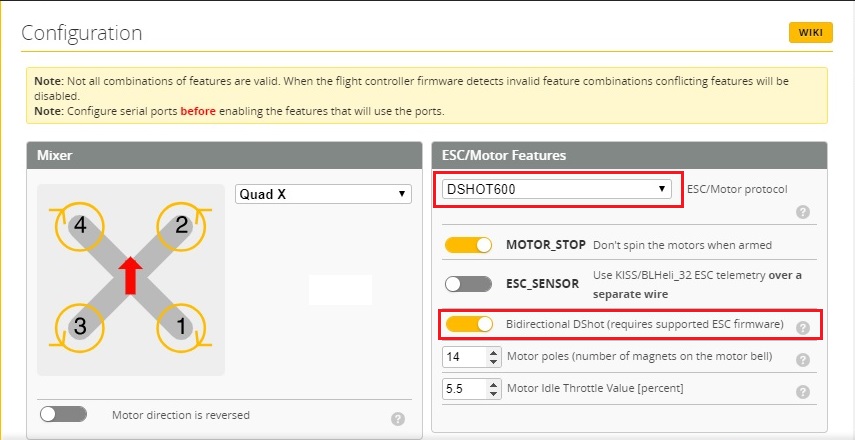
Так вот, собственно, что новое я стал использовать, так это RPM фильтрацию. Она работает за счет двухстороннего протокола DSHOT который позволяет полетному контроллеру узнать точное количество оборотов конкретного мотора. И уже на основании этих данных применяется фильтрация.
(Ваш ESC должен поддерживать двухсторонний DHSOT)
Прошивка на ESC, от 3.7
Если моторы греются, то это проблема. Горячие моторы могут быть признаком того, что на моторы попадает много шума и они пытаются реагировать на вибрации так часто, что начинает выделяться тепло.
Греться моторы могут по ряду причин, старая рама, погнутые колокола у моторов, нарушенная балансировка, лишние прибомбасы на вашем коптере.
Конечно лучше иметь, как говорят clean build, и что бы все было новое, но можно сперва попробовать настроить фильтрацию.
Для начала можно начать с увеличения фильтрации D, делать шаги в 20 Hz. Проверяйте температуру после каждого такого шага и найдите свой оптимальный диапазон.
А искать его следует между температурой моторов и вибрациями. Как было сказано выше, хоть и фильтрация призвана уменьшить количество шума, она может накладывать некоторые задержки и PID контроллер может не успевать. И как бы это смешно не было, вызывать вибрации. Но эти вибрации не относятся к пропвош. Это уже просто неэффективная работа PID.
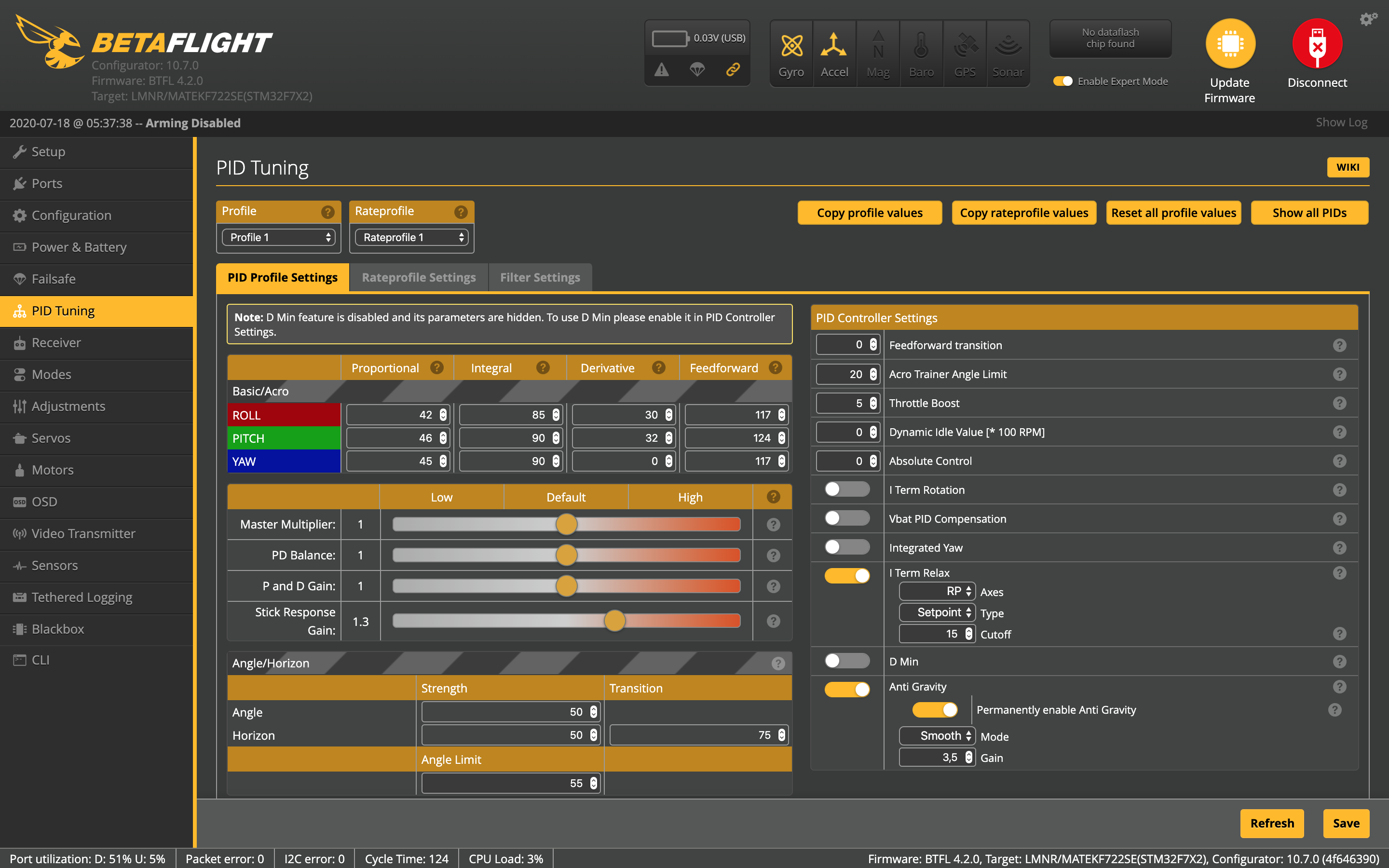
В последних версиях Betaflight есть ползунки, пробуйте не менять значения самих фильтров, а попробуйте использовать эти «мастер» ползунки.
На текущий момент у меня такие настройки с включенным RPM фильтром, возможно я попытаюсь уменьшить фильтрацию еще больше:
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета.
Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах.
Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение.
Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик — начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте.
На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; • компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет).
К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; • сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.
MegaPirateNG — это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Другие способы перехвата дронов
Способ перехвата управления над чужими дронами, показанный Андерссоном, интересен. Но он
. Еще в 2023 году Сэми Камкар (Samy Kamkar) смог научиться управлять чужими дронами, сканируя радиочастоты при помощи своего дрона, на котором был установлен Raspberry Pi и приемопередатчик WiFi. Используемый метод взлома —
При помощи этой утилиты специалист взламывал беспроводную сеть, а квадрокоптеры этой сети обнаруживались по особенностям их MAC-адреса. Как оказалось, коптеры такого типа имеют однотипные адреса, которые выделяют их среди всех прочих устройств.
После взлома сети MAC-адреса WiFi сетей в зоне действия сигнала блокируются при помощи шпионского дрона, и чужие аппараты отключаются от родных контроллеров. После этого хакер получал возможность полноценного управления чужим коптером, а также получал изображение с их камер.
Схожий метод использовала группа специалистов по информационной безопасности shellntel. Она разработала надежную схему перехвата управлениями коптера. В этом методе используется эксплуатация уязвимости в протоколе телеметрии MAVlink. Такой протокол обычно передает данные в незашифрованном виде.
Как оказалось, для перехвата управления беспилотником хватает отправки одного специально сформированного пакета. Изначально нужно перехватить идентификатор, а затем уже можно управлять функциями устройства. Специалисты утверждают, что в теории для коптеров, работающих с протоколом MAVLink можно задать GPS-координаты, и «пригонять» все устройства в одно место практически в автоматическом режиме.
Еще один способ был предложен Рахулем Саси (Rahul Sasi). Он смог перехватить управление над такими устройствами, как Parrot AR.Drone 2.0 и DJI Phantom. Для достижения этой цели он использовал реверс-инжиниринг для проприетарного программного пакета AR Drone program.elf.
Проблемой этого способа является то, что сначала дрон полностью теряет управление, на несколько секунд, и начинает работать только после активации ПО, загруженного злоумышленником. Если дрон находится достаточно высоко, проблемы нет. Но если до земли всего несколько метров, аппарат может просто разбиться.
Практически универсальный способ взлома системы управления коптера показал в апреле этого года Нильс Роддей (Nils Rodday) из IBM. На конференции Black Hat Asia он продемонстрировал, как взломать дорогой полицейский дрон, стоимость которых составляет десятки тысяч долларов США.
В процессе взлома используется две уязвимости. Первая — это взлом беспроводной Wi-Fi сети. Обычно данные, принимаемые и передаваемые дроном, шифруются, но протокол шифрования в большинстве случаев — WEP. Его давно уже научились взламывать за доли секунды.
Это простейшее шифрование, которое практически нигде уже не используется, но разработчики дронов решили внедрить именно такой протокол. После взлома и подключения к сети злоумышленника им отправляется дрону команда, отключающая устройство от своей сети. После этого взломщик получает возможность управлять всеми функциями дрона.
Используется и другой тип взлома, основанный на уязвимости чипов Xbee. Они устанавливаются в большое количество различных моделей радиоуправляемых устройств. Шифрование данных чипом поддерживается, но во многих случаях разработчики его отключают. Именно поэтому злоумышленник может взломать дрон с таким чипом с расстояния нескольких километров.
Единственный способ защиты, по мнению автора такого способа взлома — использование шифрования данных.
Как управлять квадрокоптером?
Назначение левого и правого стиков:
Левый стик – отвечает за взлёт и снижение дрона, а так же за вращение вокруг своей оси.
- Throttle Up – газ, увеличивает обороты моторов (при перемещении вверх дрон взлетает).
- Throttle Down — тормоз, уменьшает обороты моторов (при перемещении вниз дрон снижается).
- Yaw Left – при перемещении влево поворачивает дрон вокруг своей оси против часовой стрелки.
- Yaw Right – при перемещении вправо поворачивает дрон вокруг своей по часовой стрелке.
Правый стик – отвечает за «Тангаж» и «Крен» т.е. наклоны дрона на левый и правый бок, а так же вперед и назад (правым стиком пилот задает направление полёта).
- Roll Left – осуществляет наклоны дрона на левый бок (при этом дрон будет смещаться в левую сторону по горизонту).
- Roll Right — осуществляет наклоны дрона на правый бок (при этом дрон будет смещаться в правую сторону по горизонту).
- Pitch Down – при перемещении стика вверх наклоняет дрон вперед (при этом дрон начнёт смещаться в перед).
- Pitch Up –при перемещении стика вниз наклоняет дрон назад (при этом дрон начнёт смещаться назад).
Моторы
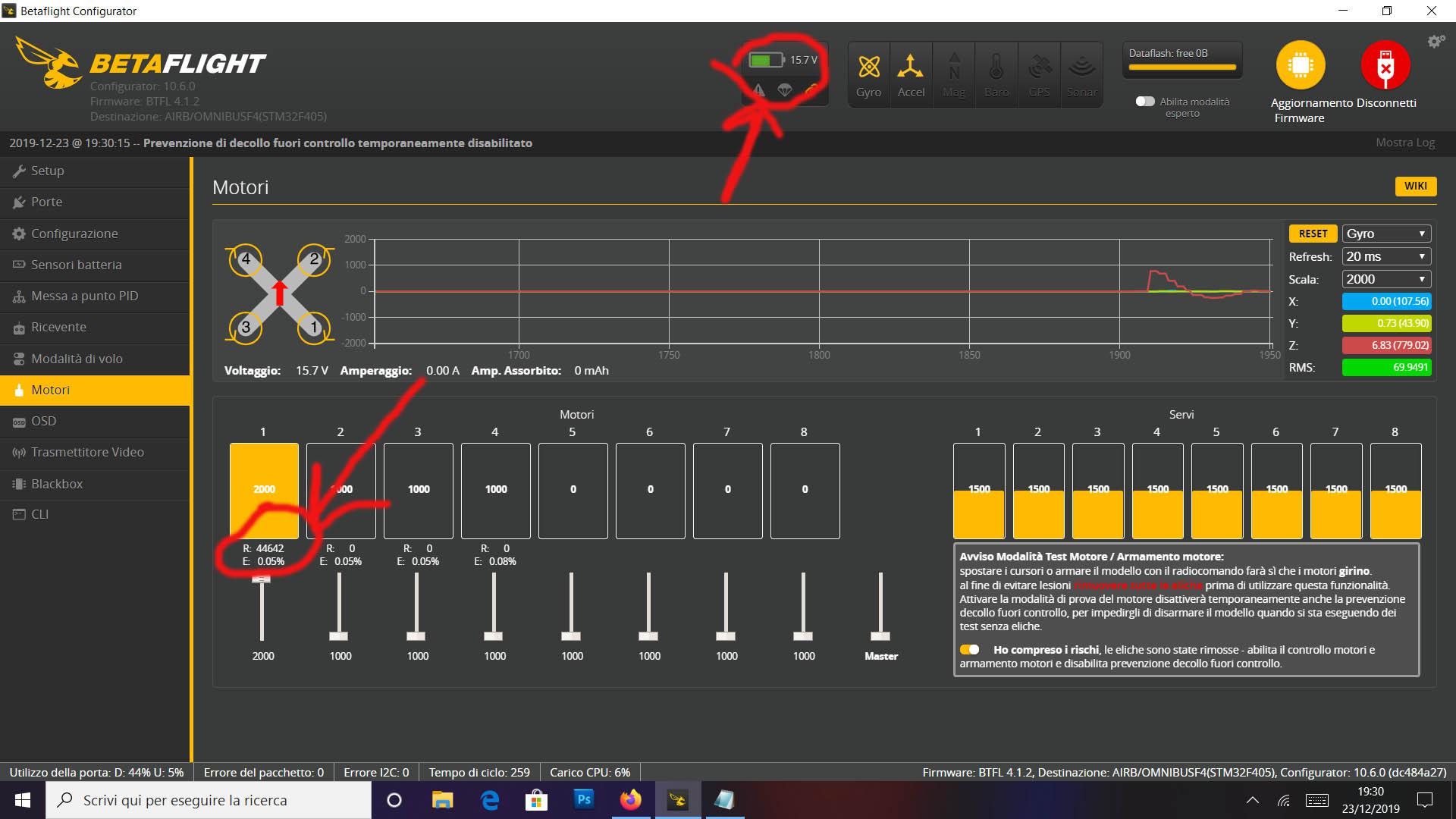
На этой вкладке проверяется работоспособность двигателей:
Перед любыми действиями, обязательно снимайте пропеллеры с двигателей!
Перед тем, как покрутить двигатели ползунками, переключите флажок «я понимаю всю опасность», чтобы активировать функционал. Теперь можете подвигать ползунки, моторы начнут крутиться: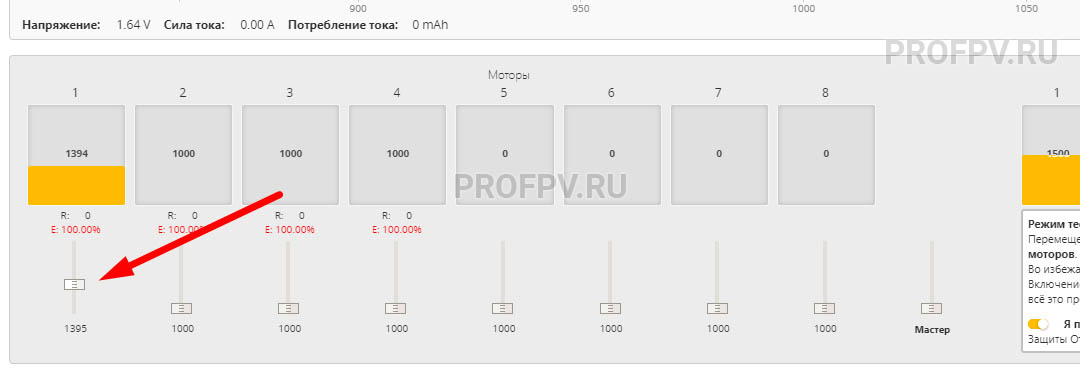 Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке.
Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.

он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя.
Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.

И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент.
Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше — тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка — это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов.
На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус — при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время.
Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 • 10 A = 40 A, а батарея может выдавать 2,2 A • 30 = 66 A или 2,2 А • 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата.
Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке.
Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном — емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) — это три последовательно подключенных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении.
Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки.
Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой.
Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.
Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module — модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее.
Получение разрешения на полеты бпла через мфц (обновление от 5.04.2023)
В регионах (в районах) уже начали подписывать соглашения с Администрациями муниципальных образований по услуге:
«Выдача разрешения на выполнение авиационных работ, парашютных прыжков, демонстрационных полетов воздушных судов, полетов беспилотных воздушных судов (за исключением полетов беспилотных воздушных судов с максимальной взлетной массой менее 0,25 кг), подъемов привязанных аэростатов над населенными пунктами, а также посадку (взлет) на расположенные в границах населенных пунктов площадки, сведения о которых не опубликованы в документах аэронавигационной информации».
Это значит, что теперь можно будет получать разрешения на полеты через МФЦ, которые есть практически в каждом муниципальном образовании любого региона.
Срок предоставления услуги составляет 20 рабочих дней с даты поступления заявления в Администрацию района. Это значит, что вам нужно заранее подавать заявление, если хотите летать легально, но практика показывает, что заявления отрабатываются гораздо быстрее.
Вот так будет выглядеть (примерно) бланк заявления в МФЦ:
Режимы
Этот раздел сделан для настройки разных тумблеров и крутилок на пульте управления.
Мы будем настраивать 2 стика:
- Арминг — поставнока и снятие с охраны квадрокоптера;
- Включение режима стабилизации и АКРО режим (ручной режим управления).
Чтобы назначить тумблеру действие, делаем следующее:
- Наводим мышь на ARM и жмем «Добавить диапазон»;
- Выбираем канал AUX1, например, либо можете оставить «АВТО» и щелкнуть любым удобным тумблером, автоматически будет выбран канал, который привязан к этому тумблеру (каждому тумблеру в пульте нужно привязать свой канал, как это делать, смотрите в видео (на английском, но все понятно):
После того, как выбрали AUX, пощелкайте тумблером. На ваши действия, по полоске будет «бегать» желтая точка, она соответствует положению тумблера. Если переместить желтые полоски на область , где будет находиться желтая точка, то квадрокоптер начнет реагировать на это положением, в нашем случае это арминг или снятие с охраны. - Нажмите «Сохранить».
Теперь, когда вы переведете этот тумблер, моторы дрона начнут вращаться с маленькой скоростью, дрон будет снят с охраны. Это называется «Заармить».
Так как на странице Конфигурация был включен ползунок на AIRMODE, квадрокоптер сейчас находится в ручном режиме без стабилизации, то есть, в режиме АКРО.
Режим ANGLE это режим стабилизации. Его назначаем на другой тумблер. Обычно эти 2 режима назначают на один тумблер у которого 3 позиции, то есть, на вторую позицию настраивают ARM и АКРО, а на 3 позицию ANGLE режим, чтобы они не накладывались друг на друга и в случае чего, вы просто переведете в верхнее положение тумблер, чтобы включилась стабилизация.
Режимы полёта дрона
Существуют различные режимы полёта в зависимости от установленного в дрон контроллера полёта (ПК/Flight Controller): KK2/Multiwii/Naze32/ArduCopter и другие). Наиболее распространенными режимами являются:
«Acro mode» (Rate mode/Manual mode) — в этих режимах электронные помощники отвечающие за стабилизацию дрона будут отключены. Скоростные показатели достигнут максимальных значений. Пилотирование смогут осуществить лишь продвинутые пилоты.
«Self-level mode» (horizon mode) – в данных режимах электроника отвечающая за стабилизацию дрона (гироскоп, акселерометр) активна, ограниченны расходы (скоростные показатели). Режимы хорошо подходят для обучения пилотированию.
Attitude Holding Mode — данный режим полёта контролируется бортовой электроникой отвечающей за стабилизацию дрона, активна функция удержания высоты, реализованная посредством бародатчика (барометра). Осуществляя полёт в этом режиме, если пилот отпустит стики/джойстики, квад не упадёт, как это могло бы быть при использовании выше указанных режимов, а зависнет на занимаемой в момент полёта высоте.
Пилоту же необходимо будет контролировать горизонтальное смещение/дрейф коптера, например, из-за присутствующего ветра. Режим оценят новички, но все же, не стоит использовать его при обучении пилотированию, так как полученный опыт не будет полноценным.
GPS Attitude Holding Mode – работает при непосредственном участии GPS модуля. Данный режим полёта контролируется бортовой электроникой отвечающей за стабилизацию дрона. Активна функция удержания позиции реализованная посредством GPS. Дрон привязывается к точке координат и позволяет точно зависать без смещения/дрейфа, даже если на него воздействуют внешние факторы, например, такие как ветер.
На практике вы встретите куда больше режимов полёта. Как уже говорилось выше, это зависит от установленного в дрон контроллера полёта. Но алгоритм работы в целом у всех будет схожим.
Рекомендации: проверка безопасности
Перед установкой пропеллеров, рекомендую выполнить ряд проверок, чтобы избежать проблем перед полетом.
Проверить направление двигателей
Перейдите во вкладку «Моторы» и включите режим тестирования по кнопке «Я понимаю всю опасность»:
Теперь запустите моторы (надеюсь вы сняли пропеллеры?) и проверьте, в правильную ли сторону крутятся двигатели в соответствии с этой схемой:
Проверить загрузку процессора
Пока квадрокоптер подключен к Betaflight, посмотрите на нижний сайд-бар:
Если загрузка будет 95% и выше, то у вас будут проблемы во время полета, так как процессор перегружен и не будет успевать вовремя обрабатывать данные. Чтобы решить эту проблему, отключите некоторые функции или отключите разгон, если у вас контроллер F4. Но на современных полетных контроллерах такая проблема — большая редкость.
Проверить гироскоп
Перейдите во вкладку Система и и проверьте настройки гироскопа:
Возьмите квадрокоптер в руки и наклоняйте его во все стороны, ваши действия точь-в-точь должна повторять 3D модель на экране. Стрелка указывает на нос дрона. Если это не так, вернитесь в начало статьи, «Конфигурация», блок 2.Кроме этого, после настроек и тем более прошивки, нужно калибровать акселерометр.
Сделайте бекап настроек
Текстовая выдержка
Пункт 52 изложить в следующей редакции:
«52. Использование воздушного пространства беспилотным воздушным судном в воздушном пространстве классов А, С и G осуществляется на основании плана полета воздушного судна и разрешения на Использование воздушного пространства.
Использование воздушного пространства беспилотным воздушным судном осуществляется посредством установления временного и местного режимов, а также кратковременных ограничений в интересах пользователей воздушного пространства, организующих полеты беспилотных воздушных судов.».
Дополнить пунктом 52 следующего содержания:
«52. Положения пункта 52 настоящих Правил не применяются в случае выполнения визуальных полетов беспилотных воздушных судов с максимальной взлетной массой до 30 кг, осуществляемых в пределах прямой видимости в светлое время суток на высотах менее 150 метров от земной или водной поверхности:
а) вне диспетчерских зон аэродромов гражданской авиации, районов аэродромов (вертодромов) государственной и экспериментальной авиации, запретных зон, зон ограничения полетов, специальных зон, воздушного пространства над местами проведения публичных мероприятий, официальных спортивных соревнований, а также охранных мероприятий, проводимых в соответствии с Федеральным законом «О государственной охране»;
б) на удалении не менее 5 КМ от контрольных точек неконтролируемых аэродромов и посадочных площадок.».
Кратко, что теперь можно:
- Летать на высотах не более 150 метров;
- Не надо подавать план полета и согласовывать полет, если ваша авиамодель весит менее 30 кг.
Регистрировать авиамодель с взлетной массой более 250 грамм и до 30 кг все также нужно!
Что нельзя:
- Нельзя летать в диспетчерских зонах, в близи аэропортов и диспетчерских зон, охранных зонах;
- Нельзя летать над массовыми мероприятиями (митинги, соревнования, демонстрации, концерты и прочие культурные мероприятия.
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит».
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.

В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт.
Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два — против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами.
Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся.
А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо.
Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса.
Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch.
Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.

Управление
Немного про радиоаппаратуру. Сейчас практически все передатчики для летающих моделей работают на частоте 2,4 ГГц. Они достаточно дальнобойные, и этот частотный диапазон не так зашумлен, как, например, 900 МГц. Для полета вообще-то достаточно четырех каналов: газ, рыскание, тангаж, крен. Ну а восьми каналов точно хватит и на что-нибудь еще.
Комплект обычно состоит из самого пульта и приемника. На приемнике находятся ручки управления и дополнительные кнопки. Обычно выбирают аппаратуру Mode2, когда левый стик управляет газом и поворотом, а правый — наклонами коптера. Все ручки, кроме газа, подпружинены и возвращаются в начальное положение при отпускании.
Также стоит обращать внимание на количество каналов. Для беспилотника потребуется четыре канала управления и один канал для переключения режимов полета, кроме того, могут потребоваться дополнительные каналы для управления камерой, для настройки или для особых режимов полетного контроллера. При выборе пульта стоит также учитывать возможность смены радиомодуля, чтобы в будущем его можно было легко обновить.
Учимся управлять квадрокоптером быстро, безопасно и бюджетно
Привет дорогие друзья-пикабушники!
Раз уж пост про выбор своего первого дрона (квадрокоптера) так сильно всем понравился, то решил продолжить писать гайды про то, как быстрее всего научиться летать на таких аппаратах.
С недавних пор я сменил род деятельности и после экспедиций к полюсам нашей планеты устроился работать в компании Геоскан (geoscan.aero). Здесь создаются серьёзные беспилотники разных видов, разрабатывается софт для пространственной обработки данных и выполняются проекты по всему миру. В данный момент у нас в стране начинает формироваться методика обучения специалистов беспилотной авиации. Данная специальность будет широко востребована в будущем, да и уже нормальных операторов БЛА не хватает. И я, как преподаватель вуза и аспирант, решил исследовать данный вопрос и выработал наиболее эффективные способы обучения управлению дроном. Мои уроки могут быть не абсолютно эффективны, но все они построены на опыте, в том числе и моём опыте обучения студентов.
Гайды будут представлены в двух видах – текстовый формат и видео, так как каждому нравится свой тип контента. Ну и не все могут любят смотреть длинные видео.
Видео:
Ок, закончили с вступлением, продолжаем. В прошлом гайде я рассказал про выбор своего первого дрона мультироторного типа. И если вы никогда до этого не летали, и послушались моего совета, то вы уже ждёте свой дрон-игрушку, а может и уже получили.
Если гайд не читали, то советую вам ознакомиться с ним по ссылке: http://radiocopter.ru/story/kratkiy_gayd_po_vyiboru_kvadrokoptera…
Хорошие среднего размера дроны для новичка – это Syma X5 и JJRC H31, но для таких квадрокоптеров нужно много пространства и лучше летать на улице. Если же у вас часто плохая погода (привет северянам!), то можно учиться на комнатном дроне, тут хороший выбор – Eachine E010 или Eachine E012. Все данные модели стоят около 1000-1500 р., но весьма крепки и интересны новичку. Маленькая и лёгкая игрушка практически не опасна, но всё равно будте предельно аккуратны и первое, что вам стоит запомнить это правила безопасного управления любым дроном:
Аккуратность и внимательность – вот отличные качества оператора беспилотного аппарата (даже маленького). Дрон мультироторного типа имеет множество режимов полёта и управления, он может управляться со стороны визуально (Line Of Sight/«линия взгляда» – LOS), и от первого лица (First Person View – FPV). Первое, что нам нужно освоить – это «классический» режим управления со стороны (LOS) в режиме стабилизации (Stabilize mode/Режим стабилизации). В данном режиме квадрокоптер будет автоматически стабилизироваться в горизонтальной плоскости, но не будет удерживать высоту, позицию или направление. Это будет базой и основой для дальнейшего обучения.
Теперь вам нужно найти место для тренировок. Если вы взяли дрон больше 100-120 размера (это расстояние в миллиметрах между моторами по диагонали), то следует учиться летать на улице. Меленькие дроны с защитой пропеллеров лучше летают дома, поэтому тут тоже есть широкие возможности для построения учебного поля.
На улице отлично подойдут футбольные или хоккейные площадки, а также корты и небольшие стадионы. Главное, чтобы на них не находились люди. Удобную площадку я легко отыскал в соседнем дворе.
Советую вам обозначить квадрат размером 10 на 10 шагов где-нибудь в центре площадки. Я использовал для этого трубки из сантехнического магазина и яркую ленту, но вы можете сделать проще. Например можно купить одноразовые тарелочки из картона, или просто вырезать из картонных коробок уголки. Главное, чтобы их было хорошо видно и не сдувало ветром.
Теперь немного об управлении мультикоптером. Пульт управления или радиопередатчик обычно имеет 2 стика и несколько кнопок и тумблеров. Для того, чтобы понять что есть что рекомендую изучить инструкцию. Для примера взят дрон SYMA X5, он дешевый, однако для новичка очень неплох. Вот обычная схема управления квадрокоптером-игрушкой (может не совпадать с вашей схемой управления – обязательно читайте инструкцию!):
Стики дрона можно отклонять разными способами, но наиболее эффективными считаются «щипком» или «большими пальцами». Попробуйте оба и решите, что вам больше по душе. Почти все, кто играл на геймпадах игровых приставок предпочитают использовать пальцы. Споры о том, что эффективнее продолжаются и по сей день…
Устанавливаем дрон на точке старта задней частью к себе, включаем. Теперь медленно поднимаем стик газа до того момента, пока дрон не оторвётся от земли буквально на 5 -10 сантиметров. На такой высоте образуется воздушная подушка, и дрон висит стабильно из-за близкой поверхности земли.
Теперь попробуем плавно, используя только правый стик, передвинуть дрон к следующему углу. Когда вы отклоняете стик, то квадрокоптер отклоняется и начинает скользить в соответствующую сторону. Если дрон цепляет землю можете немного добавить газу, но не перестарайтесь. Пробуйте не отрывать ваши пальцы от стиков управления. Не вращайте коптер вокруг вертикальной оси, чтобы не путаться пока у вас мало опыта.
Если вы запутались в управлении, закрутили квадрокоптер вокруг вертикальной оси, набрали слишком большую высоту, или покинули ваш квадрат, то просто выключите газ (отклонив стик газа вниз) и дрон упадёт. Ничего страшного – эти игрушки достаточно крепкие и выдерживают множество падений. Также поступайте при зацеплении за что-то и перевороте квадрокоптера или когда он путается в траве/кустах, задевает объекты. Просто сбросьте газ до 0! Не надо молотить винтами по земле или чему-то ещё, так простые коллекторные моторы у игрушки прослужат дольше.
Пробуйте двигаться от угла к углу, пока у вас не получится стабильно летать весь квадрат. Дальше вы можете пробовать немного увеличить высоту и контролировать уже и газ, и наклоны. Но не поднимайтесь выше двух метров.
Теперь можно повернуть дрон вокруг вертикальной оси, в таком случае управлять становится труднее, так как нужно обязательно давать команды управления относительно положения нашего летательного аппарата. Попробуйте освоить квадрат в других положениях квадрокоптера. Например передней частью к вам.
И вот вы уже отлично двигаетесь по периметру квадрата в любом направлении! Теперь можете или ещё увеличивать высоту, или пытаться летать определённые геометрические фигуры внутри квадрата, например восьмёрки и круги. Да и квадрат вам уже будет не нужен =)
Зачем же нужен квадрат, если можно просто летать на площадке? Ну он несколько дисциплинирует. Я наблюдал множество картин, когда новичок сразу набирает большую высоту, считая, что он-то над полем. А потом дрон теряет связь или его уносит ветром неизвестно куда. А если летать по самым границам площадки, то часто цепляются ветки, ограждения и прочее, особенно если опыта управления мало. Квадрат – это небольшой объект в середине площадки и если при вылете за его пределы всегда садить или ронять коптер, то вы сэкономите много времени и средств. Если вы летаете дома – просто обозначайте квадрат в середине комнаты.
Для первого урока этого достаточно, в следующем уроке я расскажу про первые шаги при освоении полёта в режиме FPV, а также расскажу про бюджетную сборку квадрокоптера, которая научит вас летать.
Ориентировочная цена такой бюджетной сборки будет:
~1000 р. – Коллекторный дрон 250 размера
~1000 р. – FPV камера
~2500 р. – FPV шлем
За ~4500 р. вы получаете неплохой дрон с шлемом для развлечений и обучения.
Ждите дальнейших публикаций. Спасибо за прочтение. Жду ваших комментариев!
P.S. Из-за того, что некоторые пользователи выразили своё недовольство тем, что я выкладываю ссылки на товары, якобы это реклама, я не буду выкладывать ссылки в постах. Да, администрация ресурса мне ничего не предъявляла и не осуждала, но я слушаю не только администрацию, но и вас, дорогие пользователи. Поэтому всем кто ищет ссылки рекомендую их искать под видео или под моими прошлыми постами. Да простит меня лига лени.
Электронные пушки
Более простым способом воздействия на коптер является радиоэлектронная пушка. Компания Batelle создала уже несколько таких устройств. Наиболее эффективной можно назвать пушку DroneDefender. С ее помощью можно создать вокруг дрона зону радиомолчания. Пушка генерирует мощный радиосигнал, который обрывает подачу сигналов со стороны оператора. Кроме того, нарушается и позиционирование по GPS или ГЛОНАСС.
В этом году компания представила и «радиопистолет», который также создает мощные помехи по всему радиоспектру вокруг дрона. Отличием пистолета от DroneDefender является возможность определения типа сигнала, который передается дроном, с созданием помех лишь для используемой радиочастоты.
Пистолет может даже передавать команды, включая «домой» и «приземлиться». Команды подходят для большого количества моделей дронов.
Самым необычным способом нейтрализовать дрон, пожалуй, является «охота» на коптер с использованием другого коптера и сети. «Полицейский» коптер несет сеть, которую набрасывает на коптер-нарушитель. В случае удачного маневра нарушителя удается нейтрализовать.
Есть схожий метод, только здесь коптер несет пушку, заряженную сетью. Как только цель идентифицирована, полицейский коптер поднимается в воздух и стреляет сетью в нарушителя. Сеть при этом крепится к дрону-охраннику длинной и крепкой нитью, чтобы нарушитель, запутавшись в сети, не упал на землю и не разбился. Собранный «урожай» полицейский дрон уносит к месту посадки.
Конечно, ловля коптеров сетью это способ перехвата из области «против лома нет приема». Перехват управления при помощи электронной системы – гораздо более интересный вариант. Как уже говорилось выше, такой способ применим практически ко всем коптерам, выпускаемых сейчас разными производителями.
То, что дроны пока что массово не перехватываются – это лишь вопрос времени. Угонять простые устройства, вероятно, неинтересно и невыгодно, а более функциональные устройства пока что распространены не повсеместно. Но как только их количество достигнет определенного предела, можно быть уверенным, что начнутся и массовые угоны. Ведь затраты в этом случае минимальны, а соблазн – велик.


