

- Рама квадрокоптера
- info
- Что такое квадрокоптер и для чего это надо
- Полетный контроллер для квадрокоптера дальнего полета
- Теория полета
- Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
- Моторы (Двигатели)
- info
- FPV камера
- Подытог
- Бортовой компьютер и сенсоры
- Безопасность
- Управление
- info
- Безопасность
- FPV очки или шлем
- Зарядное устройство
Рама квадрокоптера
Этот пункт имеет в основном эстетическое значение, рам очень много, но классика одна — это рама типа Х, либо менее классический вариант — рама типа Н.
Оптимальной рамой для дрона летающего на большие расстояния является 230-250 размер, на двух этажах достаточно удобно размещается все оборудование для дальнего полета. Эти рамы за длинную центральную секцию часто называют “автобусами”.
Любители Drone Racing потихоньку переходят на более компактные рамы, но для дальнолетов выбор “автобуса” оптимальное решение!
Если вы не имеете готового набора из пульта и приемника, то оптимальным решением будет приобретение полного комплекта дрона и последующей его доработки – установки GPS и аккумулятора большей емкости.
Готовые наборы рам дронов

Но, гораздо лучим решением будет полностью самостоятельная сборка квадрокоптера для дальних полетов на пустой раме.
Рамы дронов для дальних полетов
Электроника для дальнолета приведена в статье выше, удачной сборки и дальних полетов!
Основной момент, который нужно решить при выборе рамы, — будешь ли ты использовать готовую раму или же делать ее сам. С готовой рамой все проще, да и заказывать в любом случае придется множество деталей. При этом, учитывая цены в китайских магазинах, самодельный вариант может оказаться дороже. С другой стороны, собственную раму в случае аварии будет проще починить. Ну и, естественно, своими руками можно сделать любую, даже самую сумасшедшую конструкцию. Рассмотрим поподробнее самосборный вариант.
Сделать раму можно из любых подручных материалов (дерево, алюминий, пластик и так далее). Можно подойти чуть серьезнее и выпилить ее на ЧПУ-станке из плетеного карбона, причем можно усложнить задачу и сделать складную конструкцию.
Самый простой вариант для любителей DIY — пойти в OBI, «Леруа Мерлен» или на строительный рынок и купить квадратную алюминиевую трубу 12 × 12, а также алюминиевый лист толщиной в 1,5 мм. Для того чтобы сделать раму из таких материалов типа «четыре палки и крепеж», достаточно дрели или ножовки по металлу.

В качестве образца для твоей рамы можно взять упрощенную заводскую раму или же найти в интернете готовый чертеж. Более сложные материалы (например, углепластик) можно заменить на алюминий — если и получится тяжелее, то ненамного. В любом случае стоит обращать внимание на длину и симметричность лучей.
Длина лучей выбирается исходя из диаметра используемых пропеллеров, так, чтобы после их установки расстояние между окружностями вращающихся винтов было не менее 1–2 см, и уж тем более эти окружности не должны пересекаться. Моторы, устанавливаемые на лучах, должны быть равноудалены от центра рамы, где будет располагаться «мозг», и (в большинстве случаев) находиться на одном расстоянии друг от друга, образуя равносторонний многоугольник.
При проектировании стоит учесть, что центр рамы должен совпадать с центром тяжести, поэтому установить аккумулятор сзади между лучами — плохая идея, если он не будет скомпенсирован грузом спереди, например камерой. Продумай, на что будет приземляться твой аппарат, для новичков можно посоветовать приспособить что-то мягкое на «пузе» или концах лучей, например плотный поролон или теннисные мячики.
info
Полет от первого лица (FPV) очень захватывает, особенно если пользоваться видео-очками и HeadTracker’ом, который будет повторять движения головы на подвесе FPV-камеры, создавая ощущение, что находишься в кабине пилота.
Что такое квадрокоптер и для чего это надо
Мультироторы, они же мультикоптеры или просто коптеры, — это беспилотные летательные аппараты, предназначенные для развлечения, съемки фото и видео с воздуха или отработки автоматизированных систем.
Коптеры обычно различают по числу используемых моторов — начиная от бикоптера с двумя моторами (как GunShip из фильма «Аватар») и заканчивая октакоптером с восемью. На самом деле число моторов ограничено только твоей фантазией, бюджетом и возможностями полетного контроллера. Классическим вариантом является квадрокоптер с четырьмя моторами, расположенными на перекрещивающихся лучах.
Такую конфигурацию еще в 1920 году попытался соорудить француз Этьен Омишен (Étienne Oehmichen), и в 1922 году у него это даже получилось. По сути, это самый простой и дешевый вариант сделать летательный аппарат, способный без особых проблем поднимать в воздух небольшие камеры вроде GoPro. Но если ты собираешься взлетать с серьезной фото- и видеотехникой, то стоит выбирать коптер с большим числом моторов — это не только увеличит грузоподъемность, но и добавит надежности, если в полете выйдет из строя один или несколько моторов.
Полетный контроллер для квадрокоптера дальнего полета
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка — это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов.
На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус — при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время.

Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 • 10 A = 40 A, а батарея может выдавать 2,2 A • 30 = 66 A или 2,2 А • 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата. Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание!
Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном — емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) — это три последовательно подключенных элемента. Напряжение такой батареи будет 11,1 В. 4S2P — это восемь элементов, две группы, подключенных параллельно по четыре последовательных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении. Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC).
Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки. Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli.
Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой. Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.
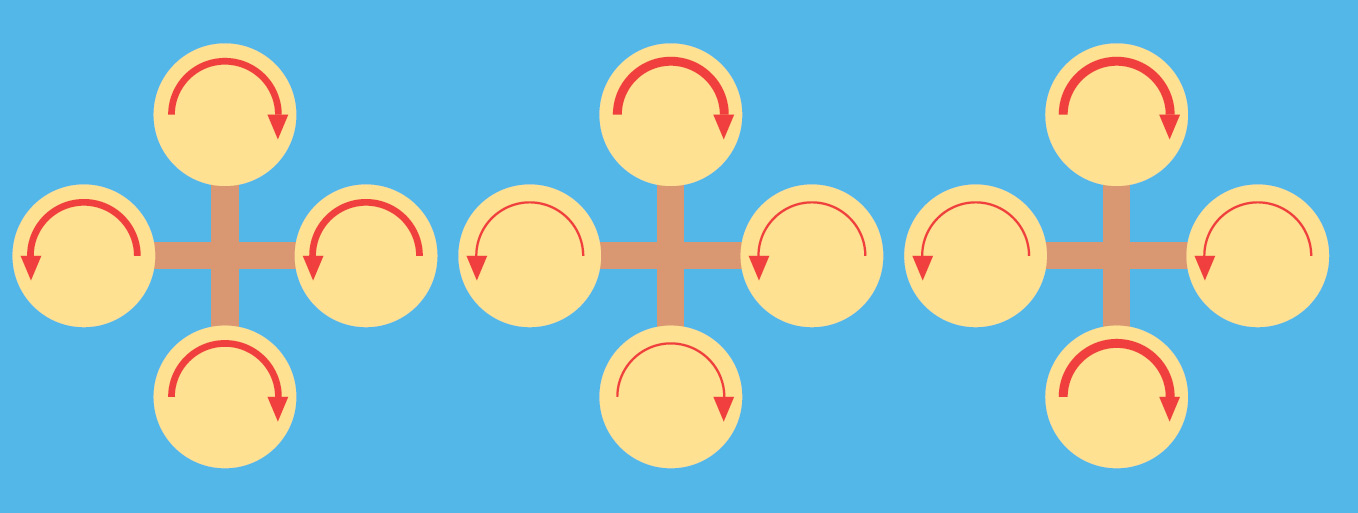
Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module — модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее. Конечно, батарею не надо припаивать, а надо соединить через разъем. Ты же не хочешь перепаивать батарею каждый раз, как она сядет.
Naza Lite – это оптимальный полетный контроллер для новичка. Его можно перепрошить под полноценную версию DJI Naza V2.
Этот полетник легко настроить: Настройка Naza . Но эта версия не умеет летать по заданным точкам, зато при потере сигнала, ваш дрон не упадет, а вернется в точку взлета.
AMP (Ardupilot Mega) – весьма продвинутый вариант полетного контроллера, требует вдумчивой настройки. Вариант не дешевый, но при должном усердии или умении это весьма продвинутый вариант!
Если установить модуль телеметрии – то данные о полете можно получать на смартфон или планшет и задавать полет по точкам в реальном времени полета.
Также AMP вернет дрон к месту взлета при потере сигнала.
Omnibus позволяет подключить GPS и компас и после установки iNav у вас появится возможность полета по точкам и автовозврата.

Это самый дешевый вариант автопилота с GPS и авторежимами! К тому же настройка Omnibus проще, чем APM.
Сейчас становятся популярными комбинированные решения — полетный контроллер с встроенным видеопередатчиком. Плюсы очевидны — занимает меньше места, отсутствие лишних проводов, дешевле в цене. Но и как у всего хорошего, есть и минусы: если вы на продолжительное время включите его (контроллер с видеопередатчиком) без антенны, то он естественно сгорит и придется менять всю плату, включая полетник.
В последнее время, Betaflight делают упор разработки на полетный контроллер поколения F4, поэтому, рекомендуем придерживаться следующих компонентов:
- Дорогой, но хороший и качественный полетный контроллер с совмещенным видеопередатчиком плата разводки питания (PDB) — HGLRC F4 V6PRO — https://goo.gl/8DQ8yw
Цена: 4000р или 64$
HGLRC F4 V6PRO - Также хороший и популярный полетный контроллер с интегрированным видеопередатчиком, но без PDB (плата разводки, ее можно докупить примерно за 300-350р) NTXF4-FC Omnibus F4 — https://goo.gl/PPsC7v
Цена: 2528р или 40$.
NTXF4-FC Omnibus F4
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит». Даже самолеты в полете имеют какую-то составляющую «сноса», которая уводит их от курсового направления. А вертолеты вообще могут летать боком.
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.
Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
Однако, кроме платы управления не малую роль играют регуляторы оборотов электродвигателей.
Рекомендуется покупать специальные регуляторы для квадрокоптеров –
Turnigy MultiStar
, их не надо дополнительно перепрошивать.
Для самодельного квадрокоптера размерами 450-600 мм подойдет следующие регуляторы:
С регуляторами оборотов сейчас на рынке более менее спокойно, ничего особо нового нет, BLHeli_S практически ничем друг от друга не отличаются. Рекомендуем использовать регуляторы марки Racestar, они хорошо себя зарекомендовали, недорогие и беспроблемные регуляторы оборотов на 30 ампер, чего хватит с небольшим запасом на нашу сборку:
- 4 регулятора оборотов Racerstar RS30A — https://goo.gl/cXsfG2
Цена набора: 2527р или 40$
Racerstar RS30A - Регуляторы оборотов Emax Simonk Series 30A — https://goo.gl/BT6uUp — здесь они продаются поштучно, поэтому нужно выбрать вкладку 30А и 4шт.
Цена за 4шт — 2607р или 46,4$
Emax Simonk Series 30A
Моторы (Двигатели)
Компания DYS на данный момент выпускает бюджетную версию двигателей под названием «Samguk». Фирма очень хорошо себя зарекомендовала в сообществе пилотов, как качественный и недорогой производитель моторов для квадрокоптеров. Красивый дизайн моторов и открытый низ для уменьшения веса — это моторы Samguk. В линейку входят 3 размера/мощности двигателя: «Wu» — 2206, «Shu» — 2306, а также «Wei» — 2207.
Мы рекомендуем купить Wu» — 2206, так как это будет самым оптимальным вариантом ценамощностькачество.
- Моторы DYS Samguk серии Wu 2206 — https://goo.gl/NrZa8v
Цена за 4 двигателя: 2526р или 40$
DYS Samguk серии Wu 2206 - Моторы DYS Samguk серии Shu 2306 — https://goo.gl/xj6jHs
Цена за 4 двигателя: 2526р ил 40$
DYS Samguk серии Shu 2306 - Моторы Racerstar SPROG X 2206 — https://goo.gl/aJqhCd
Цена за 5 двигателей (1 запасной): 2869р или 45,39$
Racerstar SPROG X 2206
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке.
Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.
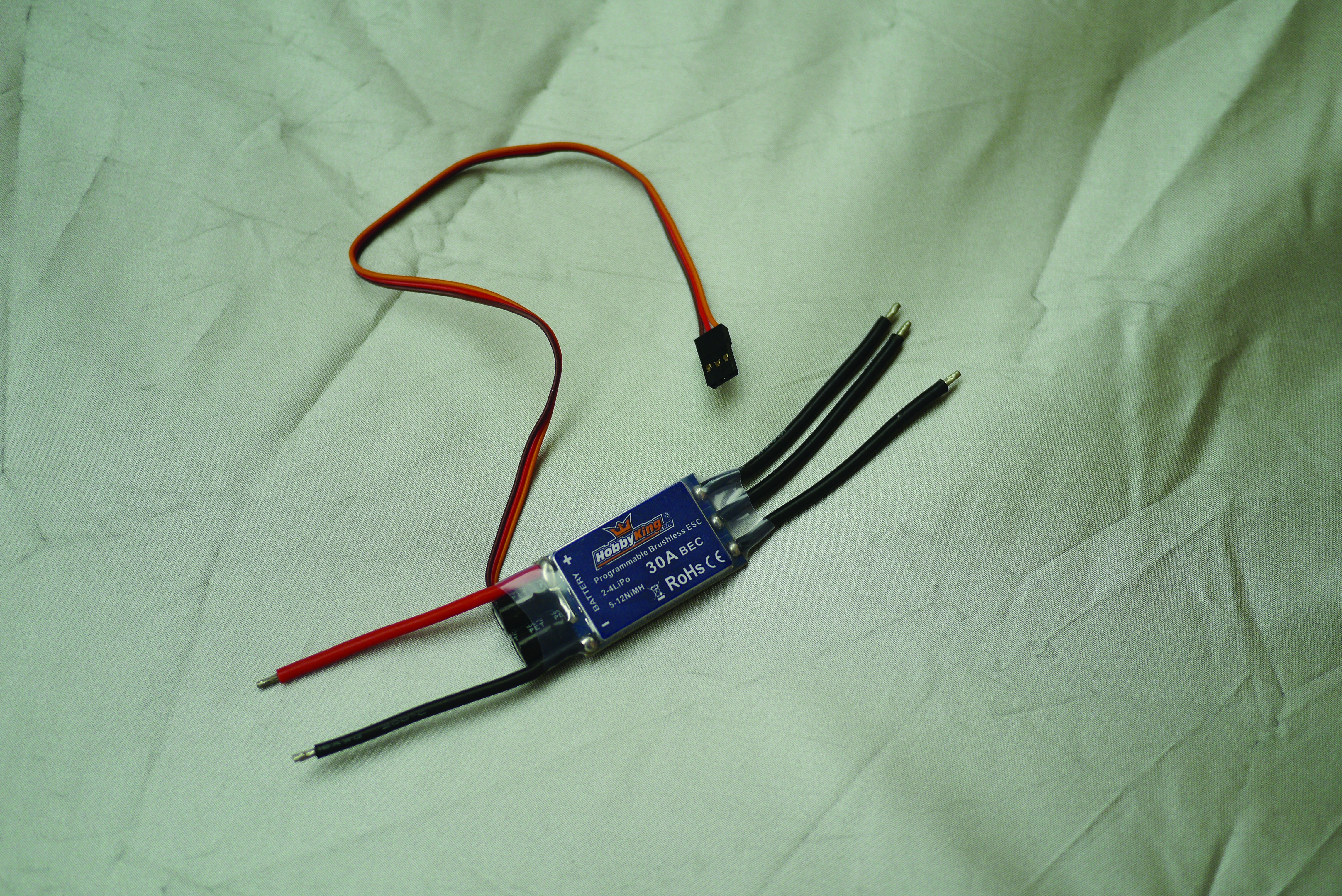
он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя.
Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности. Существуют и пропеллеры с изменяемым шагом, что в теории повысит маневренность, но в реальности добавит сложную механику, имеющую свойство изнашиваться и ломаться с последующим дорогостоящим ремонтом.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.

И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент. Чем больше kV при той же мощности, тем больше оборотов и ниже момент.
info
Более прочный материал — дюраль (Д16Т). Практически не гнется, достаточно пружинистый, и его применяют в авиации. Профили из него в ОБИ не продаются, но можно поймать на Митинском рынке на третьем этаже, на рынке ТВЦ «Строй» тоже были.
FPV камера
Здесь примерно также, как с регуляторами. В бюджетном сегменте особых продвижений и открытий нет, поэтому рекомендуем использовать классику RunCam Swift 2 или SuperHAD 600TVL. Это наилучшее соотношение цена/качество картинки.
- RunCam Swift 2 — https://goo.gl/My2Lh8 — к сожалению, сейчас камеры нет в продаже и появится она только 1 июля. Поэтому можно заменить Swift 2 на Sparrow 700TVL: https://goo.gl/cuixDp
Цена Sparrow 700TVL 2400р или 38$
Sparrow 700TVL - Камера SuperHAD 600TVL — https://goo.gl/Gcwu89
Цена 1579р или 25$
SuperHAD 600TVL
Подытог
По факту, мы собрали все комплектующие, которые в сборе можно назвать квадрокоптером. Общая цена у нас получилаь при покупке по минимальной цене: 10732 рубля или 174$, включая PDB плату из 2 пункта заголовка Полетный контроллер. Можно купить первый вариант, где все будет компактно и ничего паять не нужно будет.
Уточним: можно собрать квадрокоптер и за более низкую цену, но характеристики у него естественно будут хуже, мы же собираем дрон, который будет выдавать высокие летные качества за бюджетную цену.

Теперь нам останется выбрать аппаратуру управления (включая передатчик), шлем или очки, пропеллеры, аккумуляторы и зарядное устройство.
Бортовой компьютер и сенсоры
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте. На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки;
• компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет). К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения;
• сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Управление
Немного про радиоаппаратуру. Сейчас практически все передатчики для летающих моделей работают на частоте 2,4 ГГц. Они достаточно дальнобойные, и этот частотный диапазон не так зашумлен, как, например, 900 МГц. Для полета вообще-то достаточно четырех каналов: газ, рыскание, тангаж, крен. Ну а восьми каналов точно хватит и на что-нибудь еще.
info
Для полетов с камерой обзаведись подвесом, который будет удерживать камеру параллельно горизонту при маневрах, а также поможет управлять наклоном камеры. Большинство контроллеров имеют выходы для стабилизации подвесов с сервоприводом, а также выход для переключателя управления кнопкой спуска камеры.
Комплект обычно состоит из самого пульта и приемника. На приемнике находятся ручки управления и дополнительные кнопки. Обычно выбирают аппаратуру Mode2, когда левый стик управляет газом и поворотом, а правый — наклонами коптера. Все ручки, кроме газа, подпружинены и возвращаются в начальное положение при отпускании.
Также стоит обращать внимание на количество каналов. Для беспилотника потребуется четыре канала управления и один канал для переключения режимов полета, кроме того, могут потребоваться дополнительные каналы для управления камерой, для настройки или для особых режимов полетного контроллера. При выборе пульта стоит также учитывать возможность смены радиомодуля, чтобы в будущем его можно было легко обновить.
В аппаратуру управления входит пульт и приемник. Пультом управляют, а приемник устанавливается в квадрокоптер, он принимает сигнал с пульта и направляет в полетный контроллер.
Классикой на сегодня являются 2 аппаратуры: Taranis от FrSky и более бюджетная аппаратура FlySky.
- Taranis X9D Plus — пульт управления — https://goo.gl/KXrGP9
Цена 12514р или 198$. К нему нужно будет докупить приемник: - Frsky XM Micro D16 — приемник — https://goo.gl/9iyH9P
Цена 884р или 13,99$. На сегодня его не было на складе в Китае (только США), поэтому ссылка на Алиэкспресс с ценой 1000р: https://goo.gl/y9S7za
Taranis X9D Plus 
Frsky XM Micro D16 - FlySky FS-i6 2.4G на 6CH. Самый популярный бюджетный пульт, стоит в 3 раза дешевле Тараниса, но мало чем отличается (сейчас полетят какашки от владельцев Тараниса). Этот вариант сразу с приемником — https://goo.gl/qwYVgb
Цена 4424р или 70$.
FlySky FS-i6 2.4G на 6CH
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета.

Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах.
Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
FPV очки или шлем
Пункт как и рама — дело вкуса. У каждого разное лицо и предпочтения, одним нравится шлем, другим очки. В шлеме обзор шире, в очках он меньше. Шлем тяжелее, очки легче и удобнее. Плюсы и минусы есть у каждого варианта. Лично я предпочитаю шлем. Рекомендуется присмотреться к шлему Eachine EV800 как качественная бюджетная модель, мало чем уступающая топовым. А если хотите очки как у ПРО пилотов, то смотреть нужно в сторону FatShark Dominator или Aomway Commanders.
- Бюджетный или для новичков шлем Eachine EV800 — https://goo.gl/dRDPZa
Цена: 3727р или 59$
Бюджетный или для новичков шлем Eachine EV800 - Профессиональные очки FatShark Dominator V3 — профессиональные очки, в которых летают многие ПРО пилоты. Сама по себе марка FatShark является профессиональной и для опытных пилотов Цена у этой марки тоже совсем не бюджетная. — https://goo.gl/W1TYRL
Цена: 18960р или 300$
Профессиональные очки FatShark Dominator V3 - Профессиональные очки Aomway Commander — тоже самое, что и очки выше, для ПРО пилотов. — https://goo.gl/pJqJhk
Цена: 19593р или 310$
Профессиональные очки Aomway Commander
Зарядное устройство
В сообществе пилотов квадрокоптеров принято использовать оригинальные ЗУ Imax B6. Это универсальная зарядка, которой можно заряжать любые аккумуляторы большим диапазоном токов, главное чтобы блок питания тянул. Продается также очень много подделок, у которых к примеру нет вентилятора охлаждения, а качество компонентов оставляет желать лучшего.
- Original SkyRC IMAX B6 — https://goo.gl/BQve7E
Цена: 1895р или 29.99$
Original SkyRC IMAX B6





 купить по привлекательной цене 46990 руб. в Москве")