

- Что делать с деформированными лучами
- Основные неполадки квадрокоптеров и способы их устранения
- Skyhack – технический центр квадрокоптеров – skyhack
- Базовые принципы полета квадрокоптера
- Где искать квалифицированную помощь
- Дрон не четко летает в интеллектуальных режимах
- Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
- Квадрокоптер летает нестабильно
- Квадрокоптер не реагирует на пульт
- Коллекторный движок
- Кратко: устройство квадрокоптера
- Не работает винт квадрокоптера
- Несложный ремонт квадрокоптера (с микроскопом)
- Послушайте какие звуки издает неработающий мотор
- Посторонние шумы при запуске двигателей
- Ремонт двигателя syma x5c
- Самодельные ноги для квадрокоптера
- Статьи в тему:
Что делать с деформированными лучами
В инструкции к каждому дрону есть схема, как должны располагаться винты. Если их положение не соблюдено, то и работать аппарат не будет. В случае, когда все отлично, но работать дрон не хочет, проблема может скрываться в блоке управления мотором. Как правило, причина – нарушение пользователем требований эксплуатации, последующее падение и блокировка ротора.
Поломка лучей относится к аварийным ситуациям, потому что происходит в результате столкновений и падений квадрокоптера. Для недорогих моделей коптеров такая неисправность фатальна: чаще всего их не ремонтируют, а покупают новый аппарат. Дорогие устройства, напротив, поддаются восстановлению, т. к. для них продаются запчасти. Проведение ремонта лучей для них — экономически выгодно.
Основные неполадки квадрокоптеров и способы их устранения
Как и любому другому сложному техническому устройству с большим количеством механических деталей, подверженных постоянным нагрузкам, квадрокоптерам, иногда, свойственно ломаться.
Для того, чтобы вы, при первой же поломке квадрокоптера, которую вполне можно устранить своими силами, не теряли голову и не мчались в пункт ремонта, мы и подготовили данную подборку, в которой вы найдете основные неполадки квадрокоптеров, а также способы, которыми их можно устранить.
Основные неполадки квадрокоптеров и способы их устранения
1. Нет связи передатчика и квадрокоптера. Вероятнее всего ручка газа не стоит на положении минимум. Установите ее до упора на себя и не трогайте до тех пор, пока не будет завершена инициализация квадрокоптера.
2. Погас и/или не загорается индикатор на передатчике. Это означает, что батарейки полностью разрядились и необходимо их заменить на новые.
3. Система стабилизации квадрокоптера работает плохо или неправильно. Вероятнее всего были неправильно инициализированы начальные настройки. Посадите квадрокоптер на ровную поверхность и подождите некоторое время, после чего осуществите повторный взлет. Также на плохую работу стабилизации квадрокоптера оказывает влияние низкое напряжение от разряжающегося аккумулятора.
Основные неполадки квадрокоптеров и способы их устранения
4. При полетах квадрокоптера или запуске двигателей наблюдаются посторонние шумы и вибрация. Вероятнее всего имеются повреждения корпуса или пропеллеров.
5. Квадрокоптер не может оторваться от земли и взлететь. Такая ситуация наблюдается при неправильной установке винтов или двигатель. Внимательно проверьте маркировку каждого из них и сравните со схемой, которая приводится в руководстве пользователя вашей модели квадрокоптера.
6. Оказал двигатель. Проверьте провода, идущие к двигателю и контакты. Если с ними все в порядке, то двигатель сгорел и его необходимо заменить на новый. Также проблема может быть и более сложной и скрываться в регуляторе скорости и полетном контроле. Их также следует проверить и, при необходимости, заменить.
7. После того как квадрокоптер потерпел крушение, вал одного или нескольких двигателей вращаются со скрежетом и чрезмерным усилием. Аккуратно надавите на вал двигателя а, затем, потяните на себя. В том случае, если он продолжит работать неправильно, придется менять весь мотор.
8. После неудачной посадки или встречи с препятствием сдвинуты лучи. Скорее всего ваша модель квадрокоптера оснащена ударопоглощающей конструкцией и сдвинуть лучи в первоначальное положение следует руками, после чего необходимо нажать на соответствующие защелки.
Основные неполадки квадрокоптеров и способы их устранения
9. Не получается выполнить сложные фигуры в воздухе, в частности, кульбит. Скорее всего вам следует включить режим эксперта. Также проверьте уровень заряда аккумулятора – возможно квадрокоптеру просто не хватает мощности.
10. Квадрокоптер слишком чувствителен к командам, поступающим с пульта дистанционного управления, из-за чего полет получается резким, а управление не комфортным. Здесь, напротив, вам не хватает опыта управления, и режим эксперта следует сменить на другой, с более низкой чувствительностью управления.
11. Во время полета квадрокоптер постоянно сносит в одну из сторон. Эта проблема явно указывает на неправильную калибровку. Установите квадрокоптер на столе или любой другой ровной поверхности и подложите подкладку из нескольких листов бумаги или тонкий картон под тот луч, в сторону которого квадрокоптер отклоняется в полете. После того как калибровка будет произведена вновь, проблема должна исчезнуть.
12. Качество видео с квадрокоптера плохое. Во-первых, выбирайте модели квадрокоптеров с хорошей современной оптикой, а, во-вторых, используйте качественные карты памяти от известных производителей.
Источник
Skyhack – технический центр квадрокоптеров – skyhack
дронов, подвесов, стедикамов
Ремонт квадрокоптеров Dji в Москве – наша специализация уже 7 лет. А собирать дроны, летать и снимать мы начали в 2023 году. За эти десять лет, специалисты компании SkyHack приобрели опыт, который теперь используют при сервисном обслуживании, ремонте любой сложности любых моделей квадрокоптеров, а также в разработке собственных беспилотников.
Репутация технического центра SkyHack подкрепляется известностью среди профессионалов. В ее основе – наши работы по глубокому изучению принципов работы техники Dji, приведшие к первым в мире результатам по снятию ограничений на бесполетные зоны (NFZ mod by CopterSafe).
§
дронов, подвесов, стедикамов
Ремонт квадрокоптеров Dji в Москве – наша специализация уже 7 лет. А собирать дроны, летать и снимать мы начали в 2023 году. За эти десять лет, специалисты компании SkyHack приобрели опыт, который теперь используют при сервисном обслуживании, ремонте любой сложности любых моделей квадрокоптеров, а также в разработке собственных беспилотников.
Репутация технического центра SkyHack подкрепляется известностью среди профессионалов. В ее основе – наши работы по глубокому изучению принципов работы техники Dji, приведшие к первым в мире результатам по снятию ограничений на бесполетные зоны (NFZ mod by CopterSafe).
§
дронов, подвесов, стедикамов
Ремонт квадрокоптеров Dji в Москве – наша специализация уже 7 лет. А собирать дроны, летать и снимать мы начали в 2023 году. За эти десять лет, специалисты компании SkyHack приобрели опыт, который теперь используют при сервисном обслуживании, ремонте любой сложности любых моделей квадрокоптеров, а также в разработке собственных беспилотников.
Репутация технического центра SkyHack подкрепляется известностью среди профессионалов. В ее основе – наши работы по глубокому изучению принципов работы техники Dji, приведшие к первым в мире результатам по снятию ограничений на бесполетные зоны (NFZ mod by CopterSafe).
§
дронов, подвесов, стедикамов
Ремонт квадрокоптеров Dji в Москве – наша специализация уже 7 лет. А собирать дроны, летать и снимать мы начали в 2023 году. За эти десять лет, специалисты компании SkyHack приобрели опыт, который теперь используют при сервисном обслуживании, ремонте любой сложности любых моделей квадрокоптеров, а также в разработке собственных беспилотников.
Репутация технического центра SkyHack подкрепляется известностью среди профессионалов. В ее основе – наши работы по глубокому изучению принципов работы техники Dji, приведшие к первым в мире результатам по снятию ограничений на бесполетные зоны (NFZ mod by CopterSafe).
§
дронов, подвесов, стедикамов
Ремонт квадрокоптеров Dji в Москве – наша специализация уже 7 лет. А собирать дроны, летать и снимать мы начали в 2023 году. За эти десять лет, специалисты компании SkyHack приобрели опыт, который теперь используют при сервисном обслуживании, ремонте любой сложности любых моделей квадрокоптеров, а также в разработке собственных беспилотников.
Репутация технического центра SkyHack подкрепляется известностью среди профессионалов. В ее основе – наши работы по глубокому изучению принципов работы техники Dji, приведшие к первым в мире результатам по снятию ограничений на бесполетные зоны (NFZ mod by CopterSafe).
§
дронов, подвесов, стедикамов
Ремонт квадрокоптеров Dji в Москве – наша специализация уже 7 лет. А собирать дроны, летать и снимать мы начали в 2023 году. За эти десять лет, специалисты компании SkyHack приобрели опыт, который теперь используют при сервисном обслуживании, ремонте любой сложности любых моделей квадрокоптеров, а также в разработке собственных беспилотников.
Репутация технического центра SkyHack подкрепляется известностью среди профессионалов. В ее основе – наши работы по глубокому изучению принципов работы техники Dji, приведшие к первым в мире результатам по снятию ограничений на бесполетные зоны (NFZ mod by CopterSafe).
§
дронов, подвесов, стедикамов
Ремонт квадрокоптеров Dji в Москве – наша специализация уже 7 лет. А собирать дроны, летать и снимать мы начали в 2023 году. За эти десять лет, специалисты компании SkyHack приобрели опыт, который теперь используют при сервисном обслуживании, ремонте любой сложности любых моделей квадрокоптеров, а также в разработке собственных беспилотников.
Репутация технического центра SkyHack подкрепляется известностью среди профессионалов. В ее основе – наши работы по глубокому изучению принципов работы техники Dji, приведшие к первым в мире результатам по снятию ограничений на бесполетные зоны (NFZ mod by CopterSafe).
Базовые принципы полета квадрокоптера
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Каждый квадрокоптер оснащен четырьмя винтами (квадро — четыре) постоянного шага. Под каждым винтом установлен небольшой двигатель коллекторного или бесколлекторного типа. Два винта совершают вращение против часовой стрелки, и два – по часовой.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
Где искать квалифицированную помощь
Практически все проблемы с квадрокоптерами можно решить обращением в сервисный центр. У мастеров есть все необходимые запчасти, оборудование для определения проблемы, опыт и навыки. Мастера ознакомлены с особенностями конструкции каждого дрона, они могут в короткий промежуток времени восстановить его работоспособность.
А вот вмешательство собственными силами, без наличия соответствующих знаний, может закончиться более серьезной поломкой. Мастера рекомендуют доверять специалистам и не скупиться на обслуживание, если хочется наслаждаться возможностями дрона дольше. Более того, мастера сервиса закупают только оригинальные запчасти от производителей и дают собственную гарантию на оказанные услуги.
Здесь проведут бесплатную диагностику и с помощью профессионального высокоточного оборудования определят, где основная проблема. Установление причин поломки занимает не более пятнадцати минут, после чего пользователю предлагают несколько доступных вариантов решения проблемы.
Дрон не четко летает в интеллектуальных режимах
Интеллектуальные режимы полета с использованием GPS данных могут неверно работать в случае, если коптер установил связь с малым количеством спутников. К примеру, в помещениях GPS сигнал зачастую полностью отсутствует. На открытом пространстве причиной того, что электроника не способна найти достаточное количество спутников, является плохая погода и значительная облачность.
Еще одной причиной может быть повреждение антенны GPS модуля. Впрочем, такой тип неисправности встречается редко.
Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
Прежде, чем заниматься ремонтом, по причине того, что не крутятся моторы, необходимо точно убедиться, что неисправен именно выход на мотор на полетном контроллере, именно это мы сейчас и сделаем.
Метод проверки прост и основывается на измерении уровня напряжения на всех четырех выходах на полетном контроллере и проверки, совпадают ли они.
Контроллер полета управляет регуляторами оборотов с помощью сигнала PWM (протоколы Oneshot и Multishot) или цифрового сигнала DShot.Обратите внимание, что мультиметры не умеют понимать такие сигналы. Но они могут работать как фильтр нижних частот и преобразовывать эти сигналы в показания напряжения, простыми словами, когда вы будете менять уровень газа (стик throttle, который слева на пульте), будет меняться и показания напряжения.
- Отпаяйте провода ESC от полетного контроллера.
- Подсоединитесь к Betaflight Configurator.
- Теперь измерьте напряжение на выходе двигателей с помощью мультиметра, красный на выход, а черный на землю:

В идеале, напряжение на всех четырех выходах должно быть одинаковым.
Теперь перейдите во вкладку Motor в Betaflight Configurator и переместите ползунок на 2000 (100%). Измерьте снова напряжение, оно должно возрасти после того, как вы поднимете ползунок:
Для аналоговых сигналов, таких как PWM, Oneshot, Multishot — напряжение должно быть примерно 1,5V, когда газ находится на уровне 1000 (0%), а у DShot на этой же отметке будет 0.2V.
Когда газ будет на уровне 2000 (100%), напряжение для аналоговых сигналов будет выше 3V, в то время как у DShot будет около 0.4V.
Точная цифра не имеет значения, смысл в том, чтобы все одни были одинаковы на всех выходах. Если один из выходов выдает другое значение, которое отличается от других — этот выход неисправен.
Также бывает, что после прошивки один моторперестал крутиться, хотя до прошивки работал корректно. Это может произойти по нескольким причинам:
- У вас разные ESC (да, лично мне китайцы прислали один регулятор с другой маркировкой, 3 c PRO, а один не PRO);
- Вы не сделали калибровку моторов с регуляторами.
Для первого пункта, необходимо пару раз перепрошить регуляторы оборотов, бывает, что нормально работать начинают только со 2 или 3 раза. Подробнее о прошивке по ссылке выше, в синей рамке.
По второму пункту: видите скрин выше, вкладка Моторы? Отключите аккумулятора, но при этом не отключайтесь от Betaflight, затем поднимите ползунок Master вверх. Регуляторы начнут проигрывать звуки, после того как закончат, подсоедините аккумулятор и резко переведите ползунок в нижнее положение. Регуляторы оборотов снова начнут издавать звуки.
Если мотор не начал крутиться, повторите эти два пункта. У меня это срабатывает, думаю дело в разных регуляторах.
Квадрокоптер летает нестабильно
Распространена ситуация, когда после взлета дрон кренит бок, ведет себя в полете нестабильно, не держит заданную точку, отклоняется от курса, без видимой причины заваливается. Скорее всего, дело не в дефектах электроники как таковой, а в ненастроенных или неверно настроенных гироскопе и акселерометре.
Если же после повторной калибровки коптер все равно кренит бок, но уже не так сильно, то следует задействовать триммеры на пульте. Они помогут выровнять летательный аппарат. Неправильная настройка гироскопа и игнорирование пилотом триммеров являются распространенными ошибками.
Квадрокоптер не реагирует на пульт
Отсутствие реакции на команды зачастую объясняется тем, что в пульте дистанционного управления сели батарейки или разрядился аккумулятор.
Если сигнальный индикатор на аппаратуре не загорается, то с высокой долей вероятности все дело в севших батарейках. Соответственно, никакой ремонт проводить не нужно. Достаточно вставить свежие элементы питания.
Бывает и так, что пилот неверно выполняет последовательность действий, соединяя коптер с пультом. В инструкции обычно подробно расписываются шаги, которые необходимо совершить, чтобы инициализировать беспилотник. Иногда причиной отсутствия реакции на команды является неверное положение дрона (аппарат перевернут или лежит на боку). Некоторые модели дронов не реагируют на пульт до тех пор, пока не будут установлены на горизонтальную плоскость.
Если замена батареек и правильно проведенная процедура инициализации ничего не дали, то проблему следует искать в проводах и контактах, иными словами, внутри пульта. Возможно, все дело в окислившихся батарейках. В таком случае нужно их заменить и протереть контакты.
Коллекторный движок
Отказ от запуска одного или нескольких моторов чаще случается с коллекторными двигателями. Однако причина может крыться и в обрыве проводки. Часто при падениях и ударах случается потеря контактов, но они приходят в негодность и при окислении.
Первое, что нужно сделать – осмотреть двигатель и прикрепленный к нему провод. Если причина не выявляется, сделайте прозвон электроцепи мотора. Если эта мера не принесла результата, проверьте электрический двигатель, в котором могло произойти замыкание. Иногда, при сгоревшем моторе, неисправности заметны визуально.
Техника считается надежной. Если двигатель на таком квадрокоптере не включается, сломался электрорегулятор скорости (распространенная ситуация). В целях самостоятельной диагностики можно подключить к регулятору исправный мотор. Если двигатель и здесь не заработает – сломан регулятор. Запуск мотора означает, что электронный контроллер нуждается в диагностике.
Кратко: устройство квадрокоптера
Чтобы понимать, с каким оборудованием вы имеете дело, уделим внимание конструкции квадрокоптера. Схему работы беспилотников понять не сложно. Все аппараты работают с помощью роторов, создающих диагональное вращение в противоположные стороны. Сами роторы оснащены управленцами, которые собирают сведения с гироскопов и отправляют их обратно.
Важную функцию выполняет акселерометр: он обеспечивает коптеру горизонтальное положение в воздухе. Удерживает устройство на заданной высоте бародатчик. Движение квадрокоптера будет правильным только при одинаковом вращении винтов. Если один из моторов меняет скорость вращения, аппарат кренится в сторону неисправных винтов и продолжает лететь горизонтально.
Не работает винт квадрокоптера
Преимущества нашего сервисного центра:
- Ремонт любой сложности
- Срочный ремонт от 23 минут
- Выезд курьера и бесплатная доставка
- Оригинальные комплектующие AAA класса
- Гарантия на все работы и запчасти
Предоставляем скидку 10% при заказе с сайта!
Квадрокоптеры используются во многих сферах жизни. Однако особую популярность они завоевали в качестве устройств для видеосъемки. Дроны лишены твердого сцепления и имеют до 12 винтов, расположенных в одной плоскости. Эти составляющие предоставляют прибору лучшую маневренность и высокую подъемную силу. Такая конструкция без лишних воздушных атрибутов имеет малый расход энергии и удобную массу.
Управление современными квадрокоптерами напоминает навигацию в компьютерной игре с использованием джойстика и кнопок. Хотя для полета выше 50 метров рекомендуется иметь навыки, которые позволят рассчитать создающую помехи во время управления силу ветра. Однако и опытные пилоты не всегда в силах уберечь аппарат от негативных последствий неудачного полета.
Несложный ремонт квадрокоптера (с микроскопом)
Недавно один мой хороший друг попросил меня «посмотреть» квадрокоптер
WLtoys v272
, который в результате неудачного пируэта приложился одним из лучей, после чего перестала полностью работать индикация этого луча и мотор стал работать с явными перебоями. При этом, если приложить небольшое усилие «на изгиб» — где-то что-то восстанавливалось и двигатель начинал работать в нормальном режиме.
Согласился «не глядя». И был очень впечатлен размерами «пациента»:

Надо разбираться, что не в порядке у этого крохотного ЛА.
Уронили мишку на пол,
Оторвали мишке лапу.
Все равно его не брошу –
Потому что он хороший.
Визуальный осмотр невооруженным глазом ничего не показал (ожидаемо). Но
dadget.ru
очень своевременно предоставил на тест “
портативный микроскоп
“.


И тут дело пошло гораздо веселее (и интереснее, поскольку никогда до этого не пользовался микроскопом для своих проектов в микроэлектронике).
Все последующие фото сняты микроскопом, никаким обработкам не подвергались (только масштабирование). Каждая фото — ссылка на полноразмерный оригинал изображения.
Одна из первых фотографий «материнской платы» квадрокоптера (для оценки возможностей микроскопа):

Сразу расскажу, что этот квадрокоптер построен по довольно оригинальной схеме: вся механическая часть («крестовина») совмещена с электронной частью («печатная плата»). Собственно, весь «скелет» квадрокоптера является печатной платой (ну или наоборот: печатная плата является «крестовиной»).
С одной стороны — это очень удобно: никаких лишних механических частей, но с другой — если вдруг проблемы с печатной платой (например, отломился один из «лучей») — квадрокоптер можно выбросить, поскольку нормально печатную плату восстановить скорее всего не удастся.
Но кто знает, вдруг, конкретно в этом случае повезло и удастся починить?
Начал пристально рассматривать «проблемный» луч и сразу обнаружил отсутствие одного из светодиодов (типоразмер 0603) — он просто отсутствовал, видимо, его просто целиком оторвало при ударе:

Так же вызывал сомнения (и не беспочвенно) светодиод в вершине «луча»:
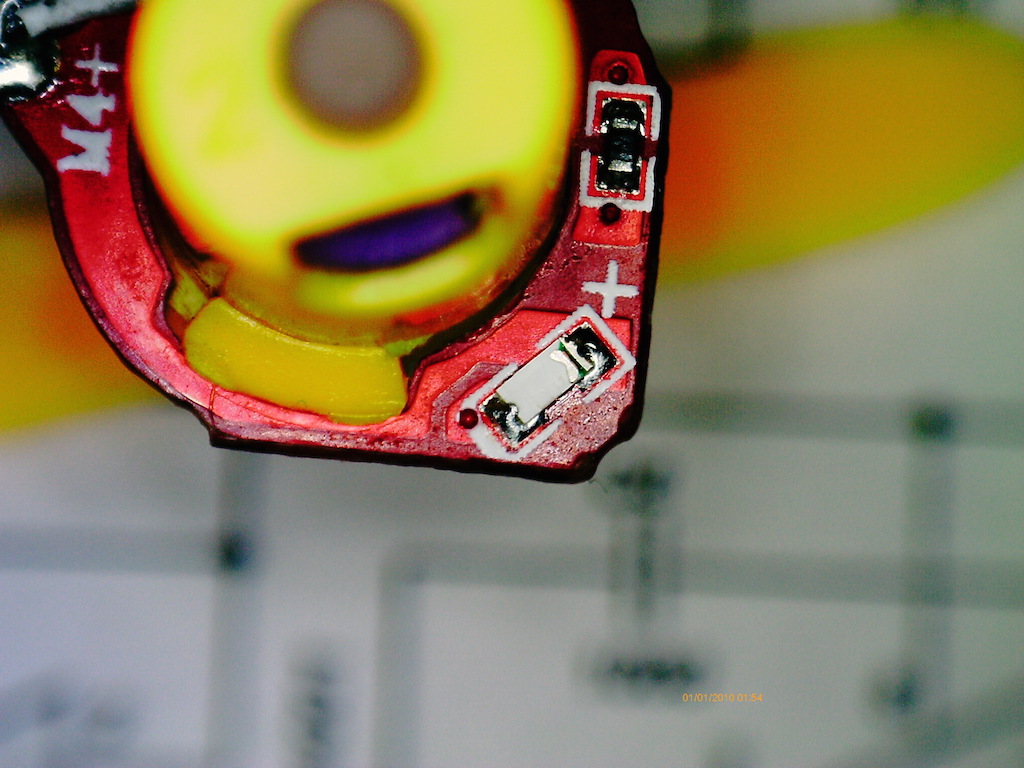
На фото видно, что от светодиода осталась только подложка. Сам кристалл и линза — отсутствуют.
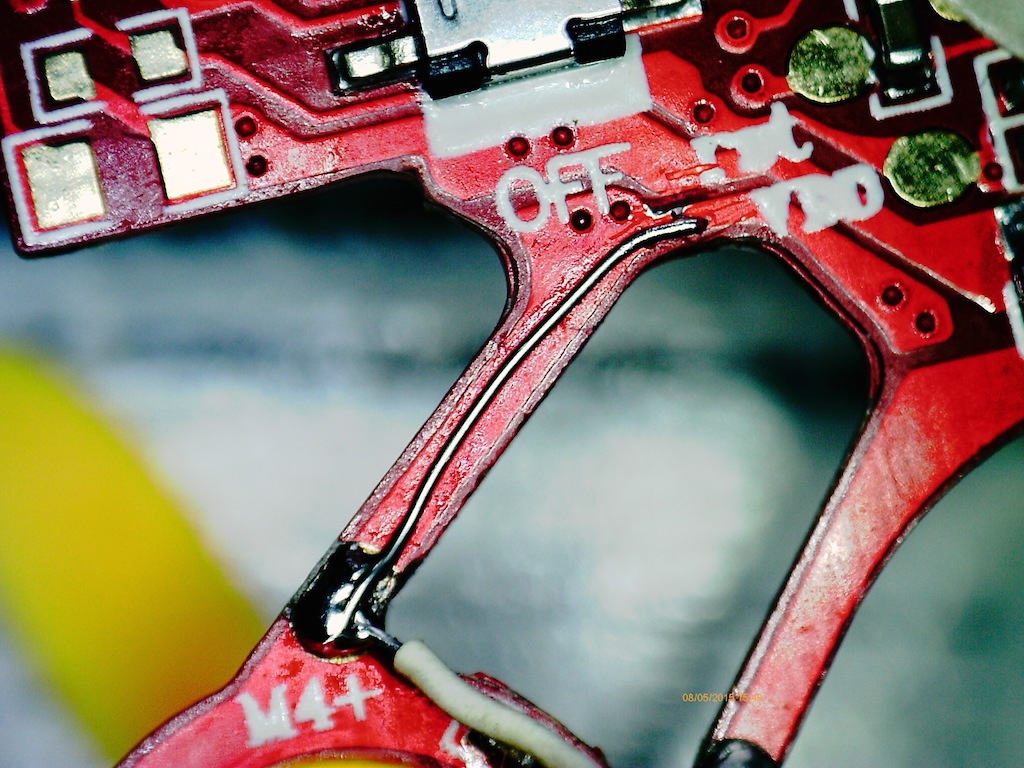
Со светодиодами разобрались, но ведь не это является главной проблемой. Нужно найти место микротрещины на луче в цепи питания соответствующего двигателя.
И опять микроскоп помог. Практически сразу вот это место вызывало сомнения:

После того как основная неисправность была локализована, ремонт стал уже «делом техники»: аккуратно убрал острым ножом часть паяльной маски, залудил «обнаженное» место и припаял тонкий проводок.
Светодиоды запаял на их законное место. Повезло, что пострадали именно красные «светики» и они были у меня в наличии (среди «сигнальных огней» еще есть синие — вот таких у меня не было и пришлось бы нарушить замысел производителя или отказаться от индикации на этом луче совсем).
Восстановленные светодиоды фотографировать не стал (никакой новой информации, просто проконтролировал качество их пайки).
После этих действий квадрокоптер «вернулся в строй» (функциональность полностью восстановилась). Видео с полетом «мухи» не будет — слишком резвая, телефоном за ней уследить практически не реально (и я пока не очень освоился с управлением для «медленных» перемещений, пригодных для съемки). Полет можно посмотреть, например, в этом видео.
Теперь замечания по поводу нового инструмента — портативного микроскопа:
- В целом, прибор понравился — просто, удобно, наглядно, доступно.
- Встроенный цветной экран позволяет оперативно рассмотреть мелкие детали, но экран все-таки мелковат и его удобно использовать в качестве грубого «видоискателя».
- При подключении к компьютеру (с соответствующим софтом, включен в комплект поставки) — есть возможность просматривать изображения непосредственно на экране компьютера (и тут уже размер отображаемого изображения ограничен только размерами монитора).
- Можно подключить практически к любому ТВ (через «тюльпаны») и использовать экран ТВ для просмотра.
- Встроенная в микроскоп система подсветки (8 белых матовых светодиодов и кольцеобразный рассеиватель) — хорошо справляются со своей задачей и существенно облегчают работу.
- «С рук» микроскопом пользоваться практически невозможно (очень малая глубина резкости, что ожидаемо), но увесистый металлический штатив в комплекте решает эту проблему.
- Можно получать как оригинальные изображения (цветные), так и черно-белые (два варианта: позитивное и негативное изображение — в некоторых случаях удобно пользоваться именно этими режимами, особенно когда надо прочитать маркировку микросхем, выполненную лазерной гравировкой).
- Есть возможность делать «таймлапс» (автоматическая серия фотографий через заданные промежутки времени) и снимать видео (фото и видео сохраняются на microSD карту (в комплект поставки не входит).
- Встроенный экран не блещет характеристиками (плохие углы обзора, «кислотные» цвета и на второй день использования появился «битый» пиксел).
- В описании заявлена поддержка русского языка, но в меню микроскопа его не нашлось (видимо, старая прошивка, но новую тоже найти не удалось). Мне не критично, но как есть.
- Богатый комплект поставки: микроскоп, зарядник, аккумуляторная батарея, чехол, A/V-кабель, USB-кабель, штатив, диск с ПО, салфетка из микрофибры.

Задачи, которые лично мне стало удобнее и проще делать с микроскопом:
Безопасных полетов вам. Берегите свои «игрушки».
Послушайте какие звуки издает неработающий мотор
Когда вы включаете (подсоединяете аккумулятор) квадрокоптер, моторы проигрывают стартовые звуки, они настраиваются при прошивке в BL_Helli, подробнее ниже:
Как только вы подключите аккумулятор, проиграет мелодия, которую вы выбрали при прошивке, а после этого будет 3 коротких сигнала «пи-пи-пи». Это значит, что ESC (регуляторы оборотов) и моторы получают питание.
Пару секунд спустя, должны издаться еще 2 сигнала, но уже более длинных — «пииии-пииии», это значит, что ESC получают корректный сигнал газа от полетного контроллера.
Если вы слышите только первые 3 коротких сигнала, но не услышали вторые 2 сигнала, значит проблема с полетным контроллером, а это скорее всего уже проблема с выходами на портах.
Что нужно проверить:
- Цел ли сигнальный провод двигателя?
- Не замкнут ли контакт двигателя, который расположен на полетном двигателе, на землю? Для проверки возьмите мультиметр и в режиме прозвонки, проверьте контакт.
Посторонние шумы при запуске двигателей
Появление посторонних шумов при запуске движков может являться признаком неисправности. Вполне может быть, что шумы генерируются не самими моторами, а погнутыми или деформированными винтами. Проблема легко решается осмотром и ремонтом пропеллеров, либо же их заменой.
Поставьте коптер на ровную поверхность и внимательно присмотритесь к пропеллерам. Если один или несколько винтов являются выпуклыми, скорее всего, именно они являются источником шума. Искривление поверхности пропеллера приводит к уменьшению подъемной тяги, ведь скорость винта снижается.
Хуже, если шум издают двигатели. Это может говорить о том, что поломка скрыта внутри корпуса мотора. В таком случае ремонт квадрокоптера будет заключаться в проверке и замене движков.
Ремонт двигателя syma x5c
Мы бы советовали не тратить время и сразу обращаться за советом к мастерам. Но если вы уверены в себе (или, давайте честно, вам просто очень интересно), то можете проверить провода и контакты — если с ними все в порядке, то отправляйтесь в сервис. Дело может быть как в сгоревшем двигателе, так и в регуляторе скорости.
Снимите крышку корпуса, чтобы проверить, если ли проблема разъемами и соединением. Если что-то отсоединилось, то можно просто припаять проводок на место. Если же таких неполадок не выявлено, то нужно менять материнскую плату или какой-либо из двигателей коптера.
На каждом квадрокоптере есть две пары разных по работе двигателей — одни совершают движение по часовой стрелке, а другие — против. На модели X5C они очень легко различимы по цветам проводов. Те, что крутятся по часовой стрелке синие и красные провода, против часовой — белые и черные.
[affegg id=45]
Новые запчасти можно найти в интернете. Для Syma X5C они не будут стоить дорого. Останется только дождаться детали. Ускорить доставку можно, заплатив курьерской службе.
Когда у вас будут все необходимые детали, проверьте наличие инструментов и других материалов, которые вам также понадобятся при ремонте:
- Отвертка;
- Кусачки;
- Паяльник;
- Вольтметр;
- Олово, свинец, смола для пайки;
- Запасные части для замены неисправных компонентов;
При замене моторов вы должны обратить внимание на полярность моторов. Нужно припаять провода двигателя к плате приемника в следующем порядке:
- Двигатель M1 (против часовой стрелки) — от белого до M1 и черный M1-
- Двигатель M2 (по часовой стрелке) — Красный к M2 и синего М2-
- Двигатель M3 (против часовой стрелки) — от белого до M3 и черный M3-
- Мотор M4 (по часовой стрелке) — Красный к M4 и синего до М4-
После того как вы припаяли обратно новые моторы, включите квадрокоптер, чтобы увидеть, если все двигатели вращаются свободно и правильно. Если все в порядке, то смело завинчивайте обратно все болты корпуса и наслаждайтесь полетами.
Самодельные ноги для квадрокоптера
Многие уже видели мой квадрокоптер. вот про него статья
http://www.parkflyer.ru/blogs/view_entry/4152/
Он был без ног.Я решил с мастерить к нему ноги, что бы они были складными и небольшими.Подумав немного, набросал чертежик как обычно на тетрадном листе)))),по старинке.


Для ног мне потребовалось толстый стеклотекстолит(у себя нашел только 2.5мм толщиной) в идеале бы стеклотекстолит толщиной 3-4мм.Ну что бы по прочнее.Так же как всегда взял кухонную пластиковую разделочную доску(купил в хозтоварах).Доска толщиной 8.5мм купил(цена доски 200р).Еще мне понадобется болты М3,гайки М3 с фиксажом(с капронкой в нутри) и 4 барашка М3.
Из стеклотекстолита я выпилил 4 ноги длиной 115мм и шириной 15мм.Покрасил ноги краской из баллона,краска грунт-эмаль для пластика(цвет графит,цена 130р)Передтем как красить обработал наждачной бумагой и обезжирир растворителем.
Из кухонной доски я сделал хомуты.Как я это делал–Рамечаем на доске прямоугольники шириной 25мм и длиной 30мм.Затем размечает центры прямоугольников для того что бы просверлить отверстие диаметром 16мм.Почему 16мм?Потому что лучи у меня 16мм в диамерте.Ах да забыл ноги будут стоять на лучах коптера!!!

Сверлим доску пером(16мм) по дереву.Почему пером спросите вы-потому что оно дешевле сверла по металлу))))) И так просверлили отверстия , теперь вырезаем прямоугольники с помошью ножовки аккуратно.После того как вырезали обрабатываем напильнико и доводим наждачной бумагой до идеала.Затем нам с боков нужно просверлить отверстия под болты М3.Сверлим сверлом 3мм аккуратно и не спеша,а то может увести сверло и испортите все.Как просверлили отверстия берем надфиль плоский и с одной стороны делаем пропил.Почему надфилем а не ножовкой?Надфилем получается аккуратнее и ровно)))) И в конце немного пройдемся наждачкой для красоты.

Теперь собираем всю конструкцию.))))И одеваем на луч коптера.Вот что получилось.С помошью барашка мы сжимаем хомут что бы не крутился на луче.А если надо сложить луч то ослабляем барашик и поворачиваем ногу под раму коптера.Ноги легко ходят по лучу коптера, так что их можно сдвинуть куда угодно.Вот такие складные ноги у меня получились.Ах да вес одной ноги в сборе составил 17гр.







На до будет потом приделать на концы нок резинки какие нибудь или можно маленькие колесики от декской машинки))))Вот еще-я немного усовершенствовал свою раму.Об этом напишу в другой статье(чертежи будут так же)
Ребята не судите строго)))Делал все в ручную.Будут вопросы пишите отвечу с удовольствием!Хотите лично что то спросить пишите вконтакте http://vk.com/nikolaev150186 ВСЕМ СПАСИБО ЗА ВНИМАНИЕ!!!
§
Многие уже видели мой квадрокоптер. вот про него статья
http://www.parkflyer.ru/blogs/view_entry/4152/
Он был без ног.Я решил с мастерить к нему ноги, что бы они были складными и небольшими.Подумав немного, набросал чертежик как обычно на тетрадном листе)))),по старинке.
Для ног мне потребовалось толстый стеклотекстолит(у себя нашел только 2.5мм толщиной) в идеале бы стеклотекстолит толщиной 3-4мм.Ну что бы по прочнее.Так же как всегда взял кухонную пластиковую разделочную доску(купил в хозтоварах).Доска толщиной 8.5мм купил(цена доски 200р).Еще мне понадобется болты М3,гайки М3 с фиксажом(с капронкой в нутри) и 4 барашка М3.
Из стеклотекстолита я выпилил 4 ноги длиной 115мм и шириной 15мм.Покрасил ноги краской из баллона,краска грунт-эмаль для пластика(цвет графит,цена 130р)Передтем как красить обработал наждачной бумагой и обезжирир растворителем.
Из кухонной доски я сделал хомуты.Как я это делал–Рамечаем на доске прямоугольники шириной 25мм и длиной 30мм.Затем размечает центры прямоугольников для того что бы просверлить отверстие диаметром 16мм.Почему 16мм?Потому что лучи у меня 16мм в диамерте.Ах да забыл ноги будут стоять на лучах коптера!!!
Сверлим доску пером(16мм) по дереву.Почему пером спросите вы-потому что оно дешевле сверла по металлу))))) И так просверлили отверстия , теперь вырезаем прямоугольники с помошью ножовки аккуратно.После того как вырезали обрабатываем напильнико и доводим наждачной бумагой до идеала.Затем нам с боков нужно просверлить отверстия под болты М3.Сверлим сверлом 3мм аккуратно и не спеша,а то может увести сверло и испортите все.Как просверлили отверстия берем надфиль плоский и с одной стороны делаем пропил.Почему надфилем а не ножовкой?Надфилем получается аккуратнее и ровно)))) И в конце немного пройдемся наждачкой для красоты.
Теперь собираем всю конструкцию.))))И одеваем на луч коптера.Вот что получилось.С помошью барашка мы сжимаем хомут что бы не крутился на луче.А если надо сложить луч то ослабляем барашик и поворачиваем ногу под раму коптера.Ноги легко ходят по лучу коптера, так что их можно сдвинуть куда угодно.Вот такие складные ноги у меня получились.Ах да вес одной ноги в сборе составил 17гр.
На до будет потом приделать на концы нок резинки какие нибудь или можно маленькие колесики от декской машинки))))Вот еще-я немного усовершенствовал свою раму.Об этом напишу в другой статье(чертежи будут так же)
Ребята не судите строго)))Делал все в ручную.Будут вопросы пишите отвечу с удовольствием!Хотите лично что то спросить пишите вконтакте http://vk.com/nikolaev150186 ВСЕМ СПАСИБО ЗА ВНИМАНИЕ!!!
§
Многие уже видели мой квадрокоптер. вот про него статья
http://www.parkflyer.ru/blogs/view_entry/4152/
Он был без ног.Я решил с мастерить к нему ноги, что бы они были складными и небольшими.Подумав немного, набросал чертежик как обычно на тетрадном листе)))),по старинке.
Для ног мне потребовалось толстый стеклотекстолит(у себя нашел только 2.5мм толщиной) в идеале бы стеклотекстолит толщиной 3-4мм.Ну что бы по прочнее.Так же как всегда взял кухонную пластиковую разделочную доску(купил в хозтоварах).Доска толщиной 8.5мм купил(цена доски 200р).Еще мне понадобется болты М3,гайки М3 с фиксажом(с капронкой в нутри) и 4 барашка М3.
Из стеклотекстолита я выпилил 4 ноги длиной 115мм и шириной 15мм.Покрасил ноги краской из баллона,краска грунт-эмаль для пластика(цвет графит,цена 130р)Передтем как красить обработал наждачной бумагой и обезжирир растворителем.
Из кухонной доски я сделал хомуты.Как я это делал–Рамечаем на доске прямоугольники шириной 25мм и длиной 30мм.Затем размечает центры прямоугольников для того что бы просверлить отверстие диаметром 16мм.Почему 16мм?Потому что лучи у меня 16мм в диамерте.Ах да забыл ноги будут стоять на лучах коптера!!!
Сверлим доску пером(16мм) по дереву.Почему пером спросите вы-потому что оно дешевле сверла по металлу))))) И так просверлили отверстия , теперь вырезаем прямоугольники с помошью ножовки аккуратно.После того как вырезали обрабатываем напильнико и доводим наждачной бумагой до идеала.Затем нам с боков нужно просверлить отверстия под болты М3.Сверлим сверлом 3мм аккуратно и не спеша,а то может увести сверло и испортите все.Как просверлили отверстия берем надфиль плоский и с одной стороны делаем пропил.Почему надфилем а не ножовкой?Надфилем получается аккуратнее и ровно)))) И в конце немного пройдемся наждачкой для красоты.
Теперь собираем всю конструкцию.))))И одеваем на луч коптера.Вот что получилось.С помошью барашка мы сжимаем хомут что бы не крутился на луче.А если надо сложить луч то ослабляем барашик и поворачиваем ногу под раму коптера.Ноги легко ходят по лучу коптера, так что их можно сдвинуть куда угодно.Вот такие складные ноги у меня получились.Ах да вес одной ноги в сборе составил 17гр.
На до будет потом приделать на концы нок резинки какие нибудь или можно маленькие колесики от декской машинки))))Вот еще-я немного усовершенствовал свою раму.Об этом напишу в другой статье(чертежи будут так же)
Ребята не судите строго)))Делал все в ручную.Будут вопросы пишите отвечу с удовольствием!Хотите лично что то спросить пишите вконтакте http://vk.com/nikolaev150186 ВСЕМ СПАСИБО ЗА ВНИМАНИЕ!!!
Статьи в тему:
Как запустить квадрокоптер. Только для начинающих пилотов: включение, калибровка, триммирование
Как научиться управлять квадрокоптером: советы и упражнения
Что нужно знать о пропеллерах для мультикоптера: терминология, материалы, балансировка
Для чего в квадрокоптере барометр или Как работает режим удержания высоты
Квадрокоптер с функцией «follow me»: дрон, который всегда рядом
«Headless mode»: что это такое, с чем его едят и нужен ли этот полетный режим в квадрокоптере
