

- Что мы имеем в распоряжении?
- Pix4D
- DroneDeploy
- DJI Terra
- Dji terra, dronedeploy и pix4d
- Dronedeploy livemap и pix4dreact
- Pix4dreact
- А как же гироскоп?
- Анализ данных
- Временные затраты на обработку с помощью pix4dreact
- Инспекции солнечных панелей и кровель
- Интегрируем
- Карьерная и горная добыча
- Комплементарный фильтр
- Короткое сравнение по mapper и react
- Навигация квадрокоптера с использованием монокулярного зрения
- Назначение настройки при полете
- Нефтегазовая отрасль
- Области применения pix4dreact
- Обработка данных беспилотника
- Ограничения pix4dreact
- Определение проблем
- Пид-регулятор приходит на помощь
- Планирование полета
- Подготовка устройства к полету
- Принцип работы квадрокоптера
- Сглаживаем
- Сельское хозяйство
- Совместимое с pix4dmapper оборудование (дроны и камеры)
- Совместимость dji terra и ценовая политика
- Совместимость dronedeploy и цена
- Совместимые с pix4dreact дроны и оборудование для съемки
- Стоимость программного пакета pix4dreact
- Строительство и геодезические исследования
- Сферы применения
- Типы калибровки
- Триммер
- Цены на pix4dmapper
Что мы имеем в распоряжении?
На данный момент в легкой доступности имеем стандартный набор сенсоров:
Такой набор в сборе с Arduino-подобным процессором или в виде отдельной платки можно найти за сумму 70-100$
У каждого датчика свои возможности и слабые стороны. По отдельности ни один из них не может решить ни одну и перечисленных выше задач, поэтому системы ИНС всегда строятся из комбинации датчиков, и самое интересное тут — это вычислительные алгоритмы, позволяющие соединить сильные стороны каждого из датчиков для устранения их недостатков.
Первая задача — стабилизация ориентации — довольно успешно решается гироскопами. Гироскопы очень точно меряют угловую скорость и после интегрирования можно получить углы. Но у них есть проблема — показания уплывают со временем. Для коррекции этого дрифта применяется акселерометр, который всегда (ну или почти всегда в долгосрочной перспективе) знает, где земля.
Но акселерометр ничего не почувствует, если его крутить вокруг оси Z, поэтому нам нужен магнетометр, который всегда знает, где север.Вторая задача — нахождение высоты — частично решается барометром. Если обнулить показания на земле, то при подъеме на каждый метр мы знаем, насколько изменятся его показания (естественно, если мы не летаем 12 часов и не начала меняться погода).
На помощь барометру может прийти сонар, который меряет высоту с очень высокой точностью (даже тот, что я приобрел за 5$, выдает точность ± 3мм по заявлению производителя). Но сонар способен работать только невысоко над землей (2-10м), меряет долго (до 200мс), чувствителен к качеству поверхности, к углу наклона, и может терять сигнал.
Третья задача — определение координат — не решается никак указанными выше датчиками. Акселерометр в комбинации с гироскопом может выдать линейные горизонтальные ускорения, но тут есть две проблемы: постоянно действующий огромный (по сравнению с тем, что будем измерять)
Во всех любительских полетных контроллерах задача нахождения ориентации решена хорошо и на ней останавливаться не буду. Задача довольно простая и расписана в интернете (один, два). В MultiWii используется красивое решение без сложностей типа кватернионов и матриц DCM (не забываем, что считать все это будет простенький 16-Мегагерцовый процессор), на основе упрощений для малых углов и комплементарного фильтра.
Итак, ориентацию аппарата в пространстве мы знаем с высокой степенью точности. Теперь можно перейти к основной теме статьи, т. е. постараться улучшить результаты, которые выдает барометр (или сонар), чтобы их можно было скормить ПИД-регулятору.
Для этого показания должны поступать без задержек, быть точными в короткой перспективе и не сильно уплывать со временем. Тема ПИД-регуляторов заслуживает отдельного пристального изучения, так как он широко используются в системах управления процессами. Я рекомендую сначала ознакомиться с их определением, чтобы лучше понять рассуждения, изложенные ниже.
Pix4D
Прежде скажем несколько слов о компании-разработчике ПО. “Pix4D” родом из Швейцарии. Она была создана в 2023 году сотрудниками Федеральной политехнической школы Лозанны (EPFL), а точнее сотрудниками лаборатории компьютерного зрения. Молодая на тот момент компания сосредоточилась на разработке программного обеспечения и алгоритмов в области фотограмметрии и компьютерного зрения, а также разработке инструментов для анализа тепловизионных и мультиспектральных изображений и трехмерной реконструкции.
На данный момент потребителям хорошо знакомы такие продукты, как: Pix4Dmapper, Pix4Dfields, Pix4Dcloud, Pix4Dreact, Pix4Dsurvey, Pix4Dcatch, Pix4Dmatic, Pix4Dcapture и Pix4Dengine. При этом программные инструменты создаются для работы на различных платформах: компьютерах, мобильных и облачных.
Как видим, лидерство Pix4D в области беспилотных технологий картографии сегодня очевидно. По крайней мере, речь идет о том, что компания находится в числе явных лидеров на рынке программного обеспечения в области картографии и геодезии. Ее программные продукты хорошо известны фермерам, строителям, геодезистам, спасателям и многим другим специалистам. Наиболее востребованными сегодня являются программные пакеты Pix4Dreact и Pix4Dmapper.
DroneDeploy
Еще один всемирно известный бренд, предлагающий программное обеспечение для картографии и хорошо зарекомендовавший себя среди пользователей. Опять же, прежде чем говорить о продукции бренда DroneDeploy, следует немного рассказать о нем самом.
DroneDeploy (далее DD) – американская частная компания, основанная в 2023 году в Сан-Франциско молодыми разработчиками Джоно (именно так) Миллином, Майклом Уинном и Николасом Пикингтоном. DD представляет собой облачную платформу, или облачный сервис, который создан специально для картографии и анализа данных, полученных с дронов.
Программные решения DroneDeploy на базе облачной платформы позволяют выполнять автоматическую проверку безопасности полетов, контролировать рабочие процессы и отображать их в реальном времени, а также, конечно, обрабатывать данные. Компания давно и успешно сотрудничает с ведущими производителями дронов, включая компанию DJI.
Это позволяет разработчикам успешно продвигать свое специализированное ПО конечным пользователям из разных сфер деятельности, включая сельское хозяйство, недвижимость, горнодобывающую промышленность, строительство и многое другое. Программные пакеты DroneDeploy предлагают простой и понятный для пользователя функционал. При этом продукция обладает совместимостью с различными форматами изображений и приемлемой ценой.
У DroneDeploy есть несколько различных платформ для обработки созданных аэрофотоснимков на трех уровнях.
DJI Terra
О программном пакете DJI Terra мы уже писали. Напомним, что это инструмент для картографии и геодезических исследований, разработанный компаний DJI. Одной из отличительных особенностей программы является то, что перед нами продукт типа “все в одном”.
При этом на этапе планирования полетной миссии можно выбрать любой из имеющихся в арсенале программы типов миссии, чтобы настроить дрон на специфические задачи вашей компании. То есть, вы можете задать дрону полет по определенным точкам маршрута или предписать ему полеты в рамках определенной зоны (области), настроить параметры работы подвеса и камеры (наклон, поворот и т.д.), или же задать определенный “коридор” для полетов.
Кроме этого, есть возможность сохранять уже выполненные миссии, настраивать будущие миссии уже на основе выполненных и многое другое. Приложение носит универсальный характер не только потому, что в нем можно настраивать управление дроном и параметры съемки, но и генерацию результатов: 2D/3D карты, а также модели для анализа.
Dji terra, dronedeploy и pix4d
Программа DJI Terra – это солидный продукт, который в плане картографии предлагает результаты, аналогичные DroneDeploy и Pix4Dmapper, включая 2D-картографирование в реальном времени для оперативного получения картографических данных дистанционным образом или в тех случаях, когда оперативность принятия решений имеет решающее значение.
Мы были бы необъективны, если бы не отметили и ряд недостатков DJI Terra перед продукцией DroneDeploy или Pix4Dmapper. Пользователи считают, что эти недостатки заключаются в общей точности и высоком разрешении полученных карт и моделей. Впрочем, ситуацию можно улучшить с помощью наземных контрольных точек.
Также следует отметить, что на практике реальные пользователи предпочитают зачастую использовать ПО от Pix4D, если речь идет о картографии в реальном режиме времени (несмотря на все его недостатки), так как они считают ПО от DJI или DD не столько гибким и совместимым по сравнению с продуктами от Pix4D.
Dronedeploy livemap и pix4dreact
DroneDeploy имеет функцию Live Map, которая позволяет мгновенно получать информацию в реальном времени, даже когда дрон все еще находится в полете. При реальном тестировании LiveMap было обнаружено, что программное обеспечение от DroneDeploy иногда дает сбой.
В этом случае генерация карты может быть и не завершена. По сравнению с ним приложение Pix4Dreact оказывается более надежным. Дело в том, что Pix4Dreact предполагает после выполнения полетного задания постобработку на компьютере. Именно это придает больше надежности процессу создания карт.
Причина ненадежности LiveMap от DroneDeploy заключается в том, что в одном приложении осуществляется управление БПЛА, создание изображений и карты. И все это происходит прямо во время полета дрона. Из-за этого приложение Drone Deploy LiveMap часто испытывает сильные нагрузки и прекращает обработку и генерацию карты в реальном времени.
Для генерации высококачественной карты из приложения Drone Deploy требуется подключение к Интернету для обработки изображений, полученных с БПЛА, в облаке. Это приводит не только к задействованию больших ресурсов, но и большим затратам времени. По сравнению с Drone Deploy LiveMap у Pix4Dreact создание карты намного быстрее и проще, так как изображения с дрона могут быть быстро загружены в программное обеспечение Pix4dreact, после чего начнется процесс генерации карты.
Pix4dreact
Этот программный пакет для картографических работ был специально разработан с учетом потребностей и специфических задач специалистов по оказанию чрезвычайной помощи. Отсюда одно из его очевидных преимуществ – скорость обработки аэрофотоснимков и получение двухмерных ортомозаичных карт за короткое время – считанные минуты.
А как же гироскоп?
Выше я упомянул, что для определения высоты нам понадобится ещё и гироскоп. Действительно, описанный выше алгоритм будет работать, только если вектор A (в локальной системе) смотрит точно вдоль оси Z. Как только аппарат наклонится, произойдут две неприятные вещи:
проекция A на ось Z изменится и ПИД-регулятор начнет заново медленно и мучительно искать bias. И вторая — любое горизонтальное ускорение начнет давать ненулевую проекцию на локальную ось Z. При углах наклона в 45° уже и не поймешь, где какое ускорение.
Но так как мы знаем точную ориентацию локальной системы относительно глобальной, нет ничего сложного восстановить справедливость — просто спроектируем локальный вектор A на локальный вектор G (изначально найденный акселерометром и заботливо вращаемый гироскопом), который всегда смотрит в землю.
Операция эта простая и вытекает из определения векторного произведения:
Сделать это надо до вычитания 1G.
Теперь можно посмотреть на код и результаты.
#define ACC_BARO_CMPF 300.0f
#define ACC_BARO_P 30.0f
#define ACC_BARO_I (ACC_BARO_P * 0.001f)
#define ACC_BARO_D (ACC_BARO_P * 0.001f)
#define VEL_SCALE ((1.0f — 1.0f/ACC_BARO_CMPF)/1000000.0f)
#define ACC_SCALE 9.80665f / acc_1G / 10000.0f
err = (alt - BaroAlt)/ACC_BARO_CMPF; // P term of error
errI = err * ACC_BARO_I; // I term of error
accZ = (accADC[0]*EstG.V.X accADC[1]*EstG.V.Y accADC[2]*EstG.V.Z) *
InvSqrt(fsq(EstG.V.X) fsq(EstG.V.Y) fsq(EstG.V.Z))
- errI - acc_1G;
// Integrator - velocity, cm/sec
vel = (accZ - err*ACC_BARO_P - vel*ACC_BARO_D) * cycleTime * ACC_SCALE;
// Integrator - altitude, cm
alt = vel * cycleTime * VEL_SCALE;
// Apply ACC->BARO complementary filter
alt-= err;
errPrev = err;Данные сенсоров приходят в следующих переменных:EstG.V – вектор G (он получен ранее при нахождении ориентации)accADC – чистые данные с акселерометраBaroAlt – данные с барометра, конвертированные в cmНа выходе получаем accZ, vel, alt.
Как видно, вычислительная сложность алгоритма довольно простая и Arduino его «переварит» легко (особенно если перевести в целочисленную арифметику, но тогда код станет плохо читаем).
PS: в видео есть фраза об отключении алгоритма при определенном угле наклона, и и-за этого возникает выброс ошибки. На самом деле это ограничение не нужно — алгоритм работает стабильно при любом угле от 0° до 360°
Если к этому алгоритму подключить сонар (вмето BaroAlt взять SonarAlt), то кривая высоты выглядит практически идеально. Таким образом, на низкой высоте используем сонар, при появлении ошибок или близко к пределу измерений переключаемся на барометр (предварительно согласовав высоты в период поступления достоверных данных с сонара).
К сожалению, погода пока не дает провести полетные испытания нового алгоритма. Как только появятся результаты, выложу графики сонара, отлаженный исходный код всего проекта и полетное видео.
Анализ данных
Третий слой беспилотных технологий картографии от DroneDeploy – это анализ данных и карт после завершения обработки полученной информации. DroneDeploy также предлагает специальное решение для этих целей. Оно содержит возможность хранения и изучения данных, функционал для совместной работы с членами команды, а специальные возможности для проведения измерений и создания отчетов.
Временные затраты на обработку с помощью pix4dreact
Одним из ключевых преимуществ Pix4Dreact пользователи называют оперативность, быстрое выполнение обработки полученных изображений и получение результата в виде карты. Весь процесс, от момента запуска дрона до готовой карты может быть выполнен менее чем за полчаса.
Для этого вам потребуется заранее запрограммировать полетную миссию с помощью приложения Pix4Dcapture, настроить полетный план и запустить летательный аппарат в воздух. После приземления нужно будет загрузить созданные кадры в программу обработки и через несколько минут можно будет смотреть готовую карту.
Точное время будет зависеть от размера и количества изображений. Например, при создании карты из 518 изображений время обработки и реконструкция заняли всего 16 минут. Пользователь получает готовую карту в виде файлов в формате pdf, но эти файлы достаточно маленькие и удобные для отправки по электронной почте или каким-либо иным способом другим заинтересованным пользователям.
Инспекции солнечных панелей и кровель
Программные решения от DroneDeploy предоставляют возможность создавать карты с температурными (тепловыми) данными. Это отличный вариант для тех, кому требуется выполнять проверки состояния солнечных панелей или проводить осмотры состояния кровли промышленных или других сооружений.
Специалистам хорошо известно, что обработка кадров, полученных с тепловизионной камеры, позволяет выявить проблемные места на солнечных панелях, а также потенциальное повреждения кровли: протечки воды или повреждения изоляции. Последнее – это возможность для компаний, в том числе коммунального сектора, быстро, безопасно и легко получать своевременную информацию и использовать ее для своих целей.
Интегрируем
Хорошо, оставим барометр и возьмем акселерометр. Вроде все просто — из значения по оси Z вычтем константу 1G, получим линейное вертикальное ускорение. Дважды проинтегрируем его (фактически просуммируем в измерительном цикле) и получим скорость и относительное смещение.
Для ПИД-регулятора это лакомые показатели, с ними можно построить хорошую динамическую модель. Но и тут не все так хорошо, как хотелось бы. Наклон аппарата вызовет изменение проекции вектора ускорения А на ось Z. Вибрации от мотора или изменение температуры могут вызвать «сдвиг» чувствительности, и наша константа 1G уже не будет соответствовать реальности.
Но даже в случае идеально неподвижного аппарата и точно выставленной 1G, любой сенсор выдает шум. А ведь даже крохотная ошибка в течение десятка секунд двойного интегрирования вырастает до размера слона, и вот мы видим скорость 10м/с и высоту 20м (хотя от земли ещё даже не оторвались).
Карьерная и горная добыча
В современных условиях традиционная добыча полезных ископаемых и карьерная добыча в частности требуют повышения эффективности и точности управления запасами. Также востребовано проведение инспекций и другие операции, позволяющие менеджменту получить полную и точную информацию о сложившейся ситуации и перспективах развития текущего проекта.
И в этом вопросе без применения технологии аэрофотосъемки обойтись уже невозможно, а самым дешевым и надежным вариантом становятся беспилотники. Использование беспилотных систем – эффективно, снижает риск для персонала, предоставляет точную информацию и позволяет поддерживать состояние объекта в соответствии с требованиями и нормами федеральных властей в области экологии и не только.
Комплементарный фильтр
Если объяснять по простому — этот фильтр применяется к двум величинам, измеряемых разными датчиками, и корректирует одну из них так, что она медленно стремится ко второй. В измерительном цикле фильтр реализуется простой формулой:
При этом влияние величины A2 на A1 пропорционально разнице между ними и определяется коэффициентом k (чем больше, тем слабее влияние).Если применить этот фильтр к высоте, найденной акселерометром, и показаниям барометра, получится интересная штука: дрифт акселерометра будет постоянно корректироваться барометром, а показания барометра будут сглаживаться (так как для A2 этот фильтр работает как фильтр низких частот).
Но корректироваться будет только второй интеграл, а первый по прежнему спокойно «дрейфовать» в бесконечность, и в итоге из-за малого коэффициента k барометр просто не сможет повлиять на ситуацию.Почему этот фильтр прекрасно работает для пары гироскоп акселерометр?
Короткое сравнение по mapper и react
По сравнению с Pix4Dreact программа Pix4Dmapper является намного более сложным и изощренным продуктом. Как уже отмечалось выше, она способна производить более точные и более универсальные карты. Например, Pix4Dmapper способен генерировать карты практически из данных, собранных практически любым типом камеры: RGB, тепловизором или мультиспектральным модулем. Pix4Dreact же создан только для работы с визуальными камерами.
Как уже говорилось, Pix4Dmapper способен генерировать не только двухмерные реконструкции, но и 3D-карты. При этом последние помогают измерить не только расстояние и площадь, но также объем объекта, извлечь данные профиля высоты и провести виртуальные проверки.
Навигация квадрокоптера с использованием монокулярного зрения
Сейчас для многих компьютерное зрение не является тайной за семью замками. Однако новые алгоритмы и подходы не перестают впечатлять. Одним из таких направлений является монокулярное зрение, в особенности SLAM. О том, как мы решали задачу навигации квадрокоптера, оснащенного единственной камерой, и пойдет речь в этой статье.
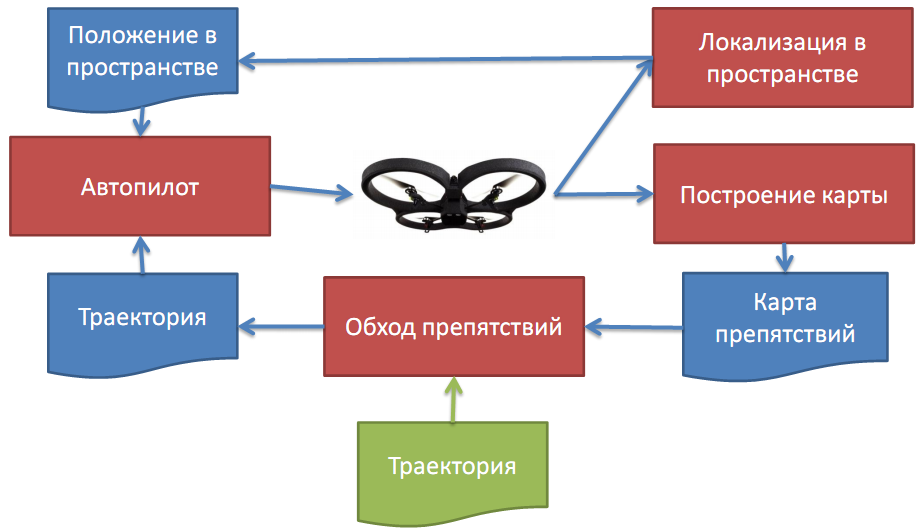
Задача
Задача заключается в движении по траектории, заданной последовательностью положений, в изначально неизвестном окружении с возможными препятствиями. Для её решения необходимо уметь:
- Строить карту препятствий
- Определять положение квадрокоптера относительно траектории и препятствий
- Корректировать траекторию с учетом облета препятствий
- Рассчитывать управляющие сигналы – реализовать контроллер
Технической базой является Parrot AR.Drone. AR.Drone снабжен следующими интересующими нас устройствами:
- Фронтальная камера: 640х360, 30 fps, диагональный угол обзора 92 градуса
- Нижняя камера: используется встроенным автопилотом для компенсации ветра и дрифта вообще
- Ультразвуковой датчик высоты: работает в пределах 0.25 – 3 м
- ИНС (акселерометр гироскоп магнетометр) барометр: все датчики интегрированы в единую систему при помощи (видимо) sensor fusion
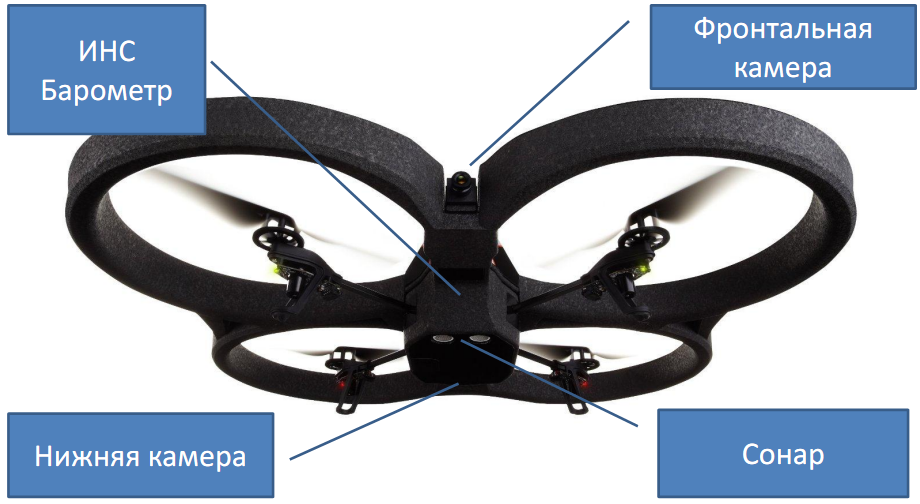
Кроме того, на основе показаний ИНС и нижней камеры формируется единая одометрия.
Итак, для построения карты окружения при помощи штатных средств AR.Drone мы можем использовать по большому счету только фронтальную камеру. Это непосредственно приводит нас к задаче монокулярного зрения, а именно к монокулярному SLAM.
Large Scale Direct SLAM
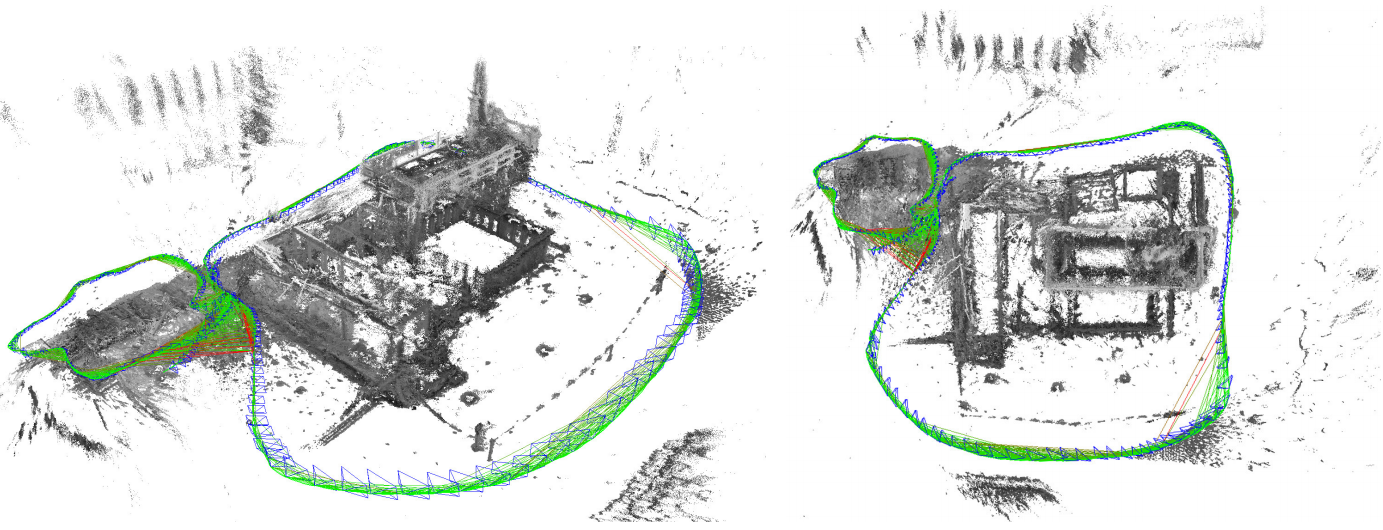
Можно смело сказать, что SLAM при помощи единственной камеры – писк современных технологий. Такие алгоритмы, появившиеся в последние несколько лет, можно пересчитать по пальцам руки неосторожного фрезеровщика – это ORB SLAM, LSD (Large Scale Direct) SLAM (и его предшественник SVO (Semi-direct Visual Odometry)), PTAM (Parallel Tracking And Mapping). Еще меньше алгоритмов, строящих более-менее плотные (semi-dense) карты окружения. Из наиболее продвинутых алгоритмов такие карты выдает лишь LSD SLAM:
В двух словах, LSD SLAM работает следующим образом. Параллельно работают три процедуры: трекинг, построение карты и оптимизация карты. Компонент трекинга оценивает положение каждого нового кадра относительно текущего ключевого кадра. Компонент построения карты обрабатывает кадры с известным положением, либо производя очистку карты кадра хитрым способом, либо создавая новый ключевой кадр. Компонент оптимизации карты занимается поиском циклов в графе ключевых кадров и устранением эффекта плавающего масштаба. Более подробно ознакомиться с алгоритмом можно в статье разработчиков.
Для стабильной и эффективной работы алгоритма (эти требования применимы к любому алгоритму монокулярного SLAM) необходимо следующее:
- Максимально более точная калибровка камеры и последующая ректификация изображения. Точность калибровки и ректификации, а также используемой модели искажений напрямую влияет на качество получаемых карт.
- Широкий угол обзора камеры. Для более-менее надежной работы нужны камеры с FOV более 80-90 градусов.
- Достаточное количество кадров секунду. При FOV в 90 градусов количество кадров в секунду не должно быть меньше 30 (лучше – больше).
- Движения камеры не должны содержать повороты без переноса. Такое движение ломает алгоритм.
Пункты 2 и 3 связаны друг с другом простым соображением: для расчета перемещения между двумя соседними кадрами изображения на этих кадрах должны перекрываться в достаточной степени. Соответственно, чем быстрее перемещается камера, тем больше должны быть угол обзора или частота кадров, чтобы связь между кадрами не потерялась.
При соблюдении этих требований можно получить карты весьма неплохого качества, в чем можно убедиться, посмотрев видео от создателей LSD SLAM:
Впечатляет, не правда ли? Однако даже если Вы достигли такого качества карт, Вас ждет еще одна неприятность: ни один алгоритм монокулярного SLAM принципиально не может оценить абсолютного масштаба полученных карт и, следовательно, локализации. Поэтому необходимо прибегнуть к некоторым хитростям и найти внешний источник данных либо помогающий определить размер объектов карты, либо оценивающий абсолютные значения перемещений камеры. Первый способ ограничен только Вашей фантазией: можно поместить объект известного размера в поле зрения камеры и затем сравнивать его с масштабами похожих частей карты, можно проводить инициализацию алгоритма в заранее известной обстановке, и так далее. Второй способ довольно легко применить, используя, например, данные альтиметра, что мы и проделали.
Для оценки масштаба мы использовали данные о перемещениях по вертикальной оси, полученных из двух источников: от алгоритма LSD SLAM и альтиметра AR.Drone. Отношение этих значений и есть масштаб карты и локализации монокулярной системы. Для устранения случайных возмущений полученное значение масштаба мы отфильтровали фильтром низких частот.
Обход препятствий и корректировка траектории
LSD SLAM хранит карту окружения в виде графа ключевых кадров с привязанными к ним частичными картами глубины. Объединяя все узлы графа, получаем карту известной части окружения в виде облака точек. Однако это еще не карта препятствий! Чтобы получить плотную (dense) карту препятствий, мы воспользовались библиотекой Octomap, строящей карту препятствий в виде октодерева на основе облака точек.
Для проверки столкновений и корректировки траектории мы использовали стек библиотек FCL (Flexible Collision Library) OMPL (Open Motion Planning Library). После обновления карты запускается проверка столкновения траектории с препятствиями, в случае обнаружения столкновений сегмент траектории пересчитывается планировщиком (мы использовали BIT*, но здесь могут быть варианты).
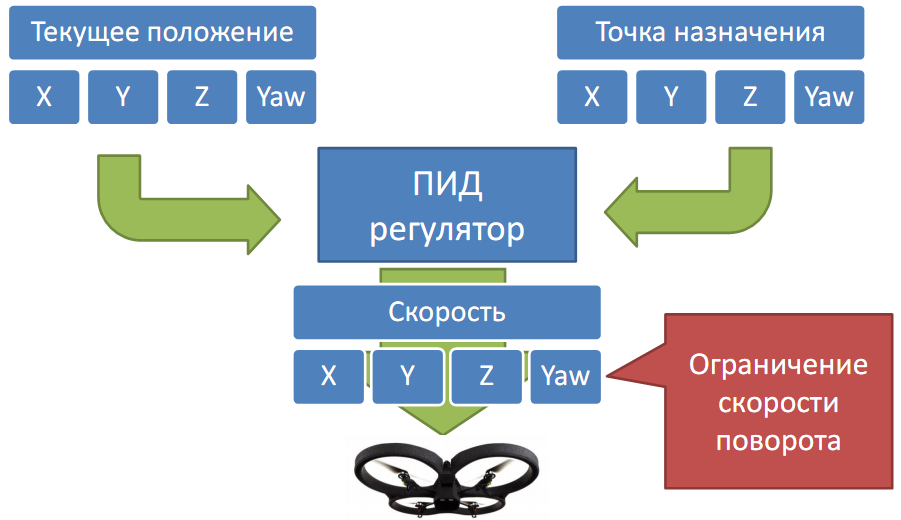
Контроллер
Контроллер оказался в итоге довольно простым, на основе ПИД-регулятора. Этого оказалось достаточно для следования по траектории. Единственное, что пришлось добавить – ограничение скорости поворота камеры для сохранения стабильности SLAM.
Платформа и общая схема решения
В качестве платформы всего решения мы использовали ROS. Платформа предлагает всю необходимую инфраструктуру для быстрой разработки параллельно работающих компонент (узлов в терминологии ROS), коммуникаций между ними, мониторинга, динамической настройки, отличный симулятор Gazebo и многое другое, облегчающее разработку серьезных робототехнических решений. Хотя стабильность отдельных компонент системы все же оставляет желать лучшего, и использовать её в продакшне ответственного проекта пока не стоит.
Общая схема решения получилась примерно такой:
Выводы
Бочка меда:
Ложка дегтя:
Ссылки:
Страница LSD SLAM на сайте разработчиков: vision.in.tum.de/research/vslam/lsdslam
Open Motion Planning Library: ompl.kavrakilab.org
Flexible Collision Library: github.com/flexible-collision-library/fcl
Octomap: octomap.github.io
Назначение настройки при полете
Для чего нужна настройка квадрокоптера? Без нее дрон будет кренить на один борт и не сможет лететь в пункт назначения, определенный владельцем. Управлять полетом в таких условиях невозможно и есть риск привести беспилотник в негодность раньше времени.
Как определить, нужно ли откалибровать квадрокоптер? Достаточно провести короткий полет, и просмотреть, как беспилотник ведет себя в пространстве. Для этого устройство поднимается в воздух хотя бы на полметра. Если траектория полета хаотичная – ему требуется калибровка.
Нефтегазовая отрасль
В нефтегазовой промышленности аэрофотосъемка используется довольно давно и вполне успешно. Она позволяет эффективно выполнять проверку состояния активов и вести учет с помощью съемки с воздуха. При этом беспилотная съемка оказывается намного дешевле для компании и безопаснее для сотрудников, а по своей точности и оперативности нередко даже превосходит другие традиционные методы.
Особенно эффективна беспилотная съемка при работе в труднодоступных и небезопасных для человека местах. Live Map от DroneDeploy позволяет в режиме реального времени: проверять инфраструктуру, состояние оборудования и управлять запасами. А результаты тепловизионной съемки помогают анализировать работоспособность объекта и состояние его компонентов, а также соответствие нормативам.
Области применения pix4dreact
Проблема оперативного принятия решений на основе точной информации чаще возникает при ликвидации чрезвычайных ситуаций, обеспечении безопасности и спасении людей. Ситуация во время различных чрезвычайных ситуаций – пожаров, наводнений, землетрясений – меняется очень быстро, причем нередко это затрагивает и ландшафт. В результате, старые карты местности оказываются либо вообще бесполезными, либо малопригодными.
Обработка данных беспилотника
После получения данных с помощью приложения DroneDeploy Flight или другой программы планирования полета, можно легко и быстро загрузить изображения на платформу обработки данных DroneDeploy (так называемый “второй слой”). Это необходимо для реконструкции точных двухмерных карт, трехмерных моделей, круговых панорам и других результатов.
С DroneDeploy легко получить результаты на уровне съемки благодаря встроенной поддержке наземных контрольных точек и технологии RTK GPS. Также можно обрабатывать практически любые типы изображений дронов, включая тепловые и мультиспектральные. К всему прочему пользователь может сохранить загруженные изображения с помощью DroneDeploy, чтобы обратить к ним позднее.
Ограничения pix4dreact
Ограничения Pix4Dreact связаны с тем, что данный программный пакет, на самом деле, является урезанной версией программы Pix4Dmapper. Да, Pix4Dreact действительно создает карты очень быстро, однако по сравнению с другими программами готовый продукт получается все же несколько менее качественным.
Кроме того, описываемое ПО способно создавать только двухмерные реконструкции. Трехмерные модели программа сделать не сможет. То есть, получить достаточно точную, надежную и измеримую информацию о ландшафтах и рельефе вы сможете, но полученному продукту не хватает изящного и сверхточного изображения высокой четкости, которое можно получить с помощью Pix4Dmapper.
Определение проблем
Как выполнять триммирование исходя из положения дрона в пространстве? Есть несколько основных проблем во время полетов:
- Если наблюдается крен в правую или левую сторону, то проблема в правом рычаге и требуется регулировка по крену.
- Если устройство без команды пользователя наклонилось вперед, а потом назад и в обратном порядке, выполняется регулировка по тангажу левым стиком.
- Если в движении есть и крен и наклон, настраивать нужно оба стика.
Триммирование позволяет настроить полет, чтобы избежать столкновений с домами и деревьями. Это не только продлит срок службы квадрокоптера, но и обезопасит окружающих людей. Вся информация о том, как откалибровать конкретный беспилотник указана в инструкции по эксплуатации.
Рекомендуем проводить калибровку, так как она поможет по крайней мере, познакомиться с джостиком и привыкнуть к стикам. Лайфхак от любителей квадрокоптеров: рекомендуется сразу переходить на высокие расходы, не засиживаясь на низких, чтобы привыкнуть к чувствительности стика.
Пид-регулятор приходит на помощь
Но и из пары барометр акселерометр можно извлечь нечто полезное, если применить к ним ПИД-регулятор (да-да, область их применения крайне обширна).
Итак, в чем главное слабое место нашего интегратора ускорения? В микро-ошибке, которая может возникнуть по разным причинам, описанным выше, при вычитании константы 1G. Если записать искомое ускорение в виде:
то, регулируя величину bias, можно управлять и первым интегралом (скоростью), и вторым (смещением). Итак, цель нашего ПИД-регулятора найдена. Но надо ещё знать ошибку. Сделаем допущение, что bias зафиксируется после наступлении некоей стабилизации параметров системы (температурных, вибрационных и т. д.).
Когда bias будет найден, показания акселерометра станут очень близки к истине и можно применить комплементарный фильтр, скрестив их с барометром. Величина коррекции этого фильтра и будет ошибкой, от которой будет отталкиваться ПИД-регулятор (он стремится свести ошибку к 0 за счет регулирования целевой переменной).
Дальше находим все три составляющие ПИД-регулятора. Пропорциональная (P) — это сама ошибка. Интегральная (I) — просто интегрируем её. Дифференциальная (D) — по теории надо дифференцировать ошибку. Но в ней сидят ужасные шумы барометра и акселерометра.
Такое дифференцировать страшно, поэтому применим хитрость — возьмем за D-составляющую найденную акселерометром скорость с отрицательным знаком. Так как D призвана ввести затухание в регулятор, скорость тут вполне сгодится — чем она больше, тем больше надо её «погасить».
Умножим каждый из компонентов на свои коэффициенты, сложим и получим bias. Но тут применим вторую хитрость — не будем прибавлять bias напрямую к ускорению, а прибавим только I-часть. Именно она описывает величину постоянно действующей ошибки, что соответствует нашему допущению о медленном изменении bias.
P и D части прибавим к скорости, умножив на dT (так как позаимствовали их из ускорения).Так как основная задача регулятора — найти постоянную составляющую ошибки, я решил настроить его достаточно «мягко», чтобы по минимуму влиять на кратковременные изменения. Но тут остается широкое поле для экспериментов, и все буде определяться поведением реальных датчиков.
Планирование полета
Собственно планирование полетной миссии и представляет тот самый первый уровень работы с данными, полученными от беспилотников. На первом уровне вам может потребоваться приложение под немудреным названием Flight от DroneDeploy. Оно разработано для для Android и iOS.
Интеллектуальная программа планирования полета позволяет легко планировать и выполнять сложные полетные миссии. Сделать это можно путем всего нескольких касаний или нажатий, чтобы автоматизировать весь полет, включая взлет и посадку. Приложение позволяет поднять дрон с полезной нагрузкой в воздух и вернуть его на базу за оптимальное время.
Функционал позволяет поделиться индивидуальным планом полета со всей командой сотрудников, чтобы повысить согласованность действий и надежность получаемых данных. Приложение DroneDeploy Flight также позволяет легко создавать любые материалы с дрона, включая фотографии, видео и панорамы.
Еще одна уникальная особенность приложения DroneDeploy Flight – это возможность создавать карту в реальном времени. Эта функция предоставляет вам возможность оценивать полученные данные прямо в полете. При этом не потребуется ни карта SD, ни подключение к Интернету.
Подготовка устройства к полету
Перед тем, как запустить дрон, нужно выполнить несколько простых шагов:
- Вставить аккумулятор внутрь устройства без включения. (не относится к моделям, со встроенной батареей);
- Чтобы настройка прошла быстрее, требуется поставить дрон на ровное место (к примеру на стол);
- Далее нужно взять квадрокоптер в руки и включить его, а затем поставить на поверхность;
- В новых моделях синхронизация гироскопов занимает примерно 10-20 секунд.
Принцип работы квадрокоптера
Работа квадрокоптера основана на принципах механики. Полет регулируется ускорением или замедлением пропеллеров. Квадрокоптер не может самостоятельно сохранять устойчивое положение во время полета. Для этого конструкция оснащена бортовым компьютером. На основании показаний гироскопов и акселерометров, контролер позволяет беспилотнику находиться в воздухе в определенном положении.
Сглаживаем
Чем нам не подходят показания барометра в текущем виде? Ну во первых, сильная зашумленность сигнала будет вызывать лишние управляющие воздействия на моторы. Применив фильтр низких частот, мы уменьшим шум, но потеряем быстроту измерения. А это значит, что любые кратковременные возмущения останутся без внимания, резкие возмущения отработаются с большой задержкой, и самое главное, мы не получим дифференциальную составляющую (D)
Сельское хозяйство
Интуитивно понятное любому пользователю мобильное приложение превращает управление дроном предельно простым и удобным, а значит и весь процесс интеграции беспилотных технологий в процесс управления хозяйством чрезвычайно эффективным и простым. То есть, например, используя дрон и приложение от DroneDeploy, вы можете обработать более 60 га угодий менее чем за четверть часа.
При этом технологию картографии с беспилотника можно использовать для самых разных целей: определения состояния посевов с помощью мультиспектрального анализа, улучшения практики изучения состояния и прогнозов урожайности и даже для оценки состояния оборудования и дренажа во время межсезонного планирования.
Совместимое с pix4dmapper оборудование (дроны и камеры)
Pix4Dmapper предлагает дополнительное преимущество, заключающееся в еще более широком диапазоне совместимости, чем у Pix4Dreact. Все летательные аппараты и съемочные системы, которые совместимы с Pix4Dreact (перечислены выше), также совместимы с Pix4Dmapper (примечание: камеры Mavic 2 Enterprise Dual хотя и совместимы, но разработчик ПО не рекомендует использовать эту модель).
Совместимость dji terra и ценовая политика
Еще один недостаток DJI Terra по сравнению с продукцией от Pix4D или DroneDeploy – это совместимость с оборудованием. Речь идет о том, что DJI Terra вы можете использовать только с серией Phantom 4: Phantom 4 RTK, Phantom 4 Multispectral и Phantom 4 Pro V2. Единственной совместимой моделью другой серии является Matrice 210 RTK V2, оснащенный подвесом с камерой Zenmuse X7.
О вариантах подписки на ПО DJI Terra подробнее смотрите на соответствующей странице. Но следует сказать, что вы можете выбрать на 4vision три варианта подписки в соответствии с требованиями DJI, причем сразу минимум на 3 места.
Совместимость dronedeploy и цена
Программное обеспечение DroneDeploy совместимо практически со всеми дронами профессионального или корпоративного уровня DJI, которые предусматривают частичную зависимость или полную зависимость от съемочной системы. Речь идет о таких моделях, как: Matrice 600 Pro, всю серию Matrice 200 V2, а также модели Inspire 1 V2 и Inspire 2.
В числе совместимых систем DJI следует отметить почти всю серию Zenmuse: X3, X4S, X5, X5S, XT и XT2. К сожалению, несовместимы модели Zenmuse X5R, Z3 и Z30, а Zenmuse X7 можно использовать только при условии, что система установлена на квадрокоптере Inspire 1.
Что же касается цен на программное обеспечение от DroneDeploy для обработки изображений, то существуют различные тарифы в зависимости от масштаба деятельности и уровня пользователя. Например, один пользователь пакета Pro с ограниченными функциями будет платить в месяц 99 долларов при условии оплаты тарифа сразу за 1 год.
Пакет Business, опять же для одного пользователя, предоставляет больше возможностей по картографии и анализу данных, но он обойдется вам в 299 долларов США в месяц при условии оплаты сразу за 1 год. Корпоративный тариф (Enterprise) DroneDeploy предлагает расширенные инструменты картографии и анализа данных сразу для нескольких пользователей одной организации. Цены будут зависеть от потребностей организации.
Совместимые с pix4dreact дроны и оборудование для съемки
Одно из важных преимуществ программного пакета Pix4Dreact заключается в его совместимости с широким спектром оборудования, в возможности обрабатывать изображения в разных форматах и совместимости с большим количеством беспилотных платформ. Правда, есть и один важный недостаток – возможность работать только с RGB-изображениями.
Для пользователей продукции DJI скорее всего будет важно знать, что программа обработки Pix4Dreact совместима с такими дронами DJI, как: Phantom 4 RTK и Phantom 4 Pro, Mavic 2 Enterprise Dual (только RGB) и Mavic 2 Pro, Inspire 2 и Inspire 1 V2, а также Matrice серии 200 и Matrice 600.
При этом следует заметить, что в моделях Inspire и Matrice совместимость изображений зависит от датчика RGB. Из съемочных систем DJI с пакетом Pix4Dreact совместимы: Zenmuse X3, Zenmuse X4S и Zenmuse X5S. Однако вы не сможете работать, если на вашем БПЛА установлены мультиспектральные и тепловизионные камеры серии Zenmuse XT или другие модели.
Стоимость программного пакета pix4dreact
Так же, как и во многих других подобных случаях, стоимость пользования Pix4Dreact будет зависеть от выбранного тарифа. Ежемесячная подписка на пакет начинается с 39 долларов США, а годовая от 390 долларов США. “Вечная” подписка стоила от 990 долларов.
Строительство и геодезические исследования
Программное обеспечение от DroneDeploy предлагает возможность создавать точные карты с высоким разрешением, отчеты, 3D-модели и двухмерные карты в реальном времени для повышения качества строительных работы на любом типе объектов. Кроме того, возможность хранить все данные по проекту в одном месте упрощает обмен изображениями и отчетами для совместного принятия решений.
Сферы применения
Разработчики картографических приложений от DroneDeploy специально создавали продукты, которые оптимально подходят для коммерческого применения: в промышленности, сфере безопасности, сельском хозяйстве и т.д. В частности, эти приложения активно используют сотрудники горно-добывающих компаний, строительной индустрии, геодезисты, фермеры, коммунальщики, энергетики, специалисты нефтегазовой промышленности, страховщики и другие профессионалы.
Типы калибровки
Есть несколько видов триммирования:
- Механическое — при незначительном отклонении необходимо подкрутить регулятор тяги;
- Автоматическое –если нужно сместить триммер на 5 позиций и больше. Устройство настраивается с пульта дистанционного управления.
Механическая калибровка квадрокоптера требует всего нескольких минут, а вот автоматическую выполнять сложнее и дольше. Выполняется работа с переключателями. Один раз откалибровать устройство иногда мало и требуется калибровка до тех пор, пока беспилотник не встанет в нужное положение. При наклоне влево треммирование выполняется в правую сторону для равновесия.
Триммер
Джостики для квадрокоптера обычно имеют стандартные кнопки и функции:
- На джостике есть правый и левый стики. В правом – вертикальное перемещение дрона и наклон вперед, а в левом – горизонтальное передвижение;
- Верхняя левая кнопка отвечает за переключение скорости;
- Верхняя правая кнопка – поворот устройства на 360 градусов;
- Слева по направлению от правого стика – переключатель движения «вперед-назад»;
- Переключатель режимов находится под правым стиком.
- Кнопка включения и выключения квадрокоптера располагается в центре джостика.
- Под кнопкой включения – дислпей, отвечающий за расходы. Высокие расходы для быстрых полетов, низкие- для малой высоты.
Цены на pix4dmapper
Более широкие возможности программы объясняют ее более высокую стоимость по сравнению с React. Так, ежемесячная подписка на Pix4Dmapper обойдется вам примерно в 292 доллара при условии, если вы оплачиваете ее сразу оптом за один год. “Вечная” лицензия доступна за 4990 долларов.


