
 – 10. Гусеницы : Jim`s Homeplace")
Бензиновые квадрокоптеры и мультикоптеры. краткий обзор
Квадрокоптеры неожиданно ворвались в нашу жизнь и распространились повсеместно. Они получили свой второй шанс на жизнь, впервые появившись в первой половине прошлого века. Однако их основная проблема так до сих пор и не решена, — над чем и бьются множество компаний и отдельных энтузиастов.
Мультикоптер (англ. Multirotor, multicopter, многороторный вертолёт, многолёт) — летательный аппарат, построенный по вертолётной схеме, с тремя и более несущими винтами
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолёт), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году.

Источник картинки: wikipedia.org
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании, также удобны для недорогой аэрофото- и киносъёмки.
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата менее 100 г), в то же время позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам. Некоторые модели разгоняются до впечатляющих 26 м/с[13], имеют высокое качество съёмки и управляются на расстоянии более 3,5 км.
По принципу управления мультикоптеры существуют:
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий. Использование GPS-приёмника позволят записывать маршрут полёта заранее, с компьютера а также возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом.
Винты могут быть установлены непосредственно на вал двигателя, либо через редуктор.
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии. Это накладывает определённые ограничения на полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30—50 минут у уникальных единичных экземпляров). Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7—12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100—200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные: радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее (для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10—15 км при высоте полёта 1—2 км).
Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности — от 500 г до 2—3 кг, что позволяет поднять в воздух небольшую фото- или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных).
Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6—8 (гекса- и октокоптеры), способные поднять в воздух груз массой до 20—30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах.
Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100—110 км/ч.
Существуют также трёх- и пятивинтовые вертолёты (три- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом — так и осуществляется поворот аппарата вокруг своей оси. Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.
Большое количество энтузиастов занимается самостоятельной сборкой коптеров.
Часто для этих целей они используются широко известный недорогой полётный контроллер KK Multicopter, который имеет несмотря на свою низкую цену, достаточно широкие возможности и позволяет управлять системой, содержащий до 6 роторов включительно.
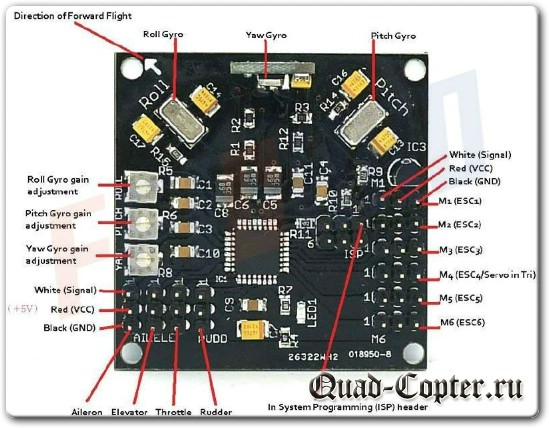
Источник картинки: www.quad-copter.ru
Следует упомянуть, что большая часть современных мультироторных систем представляет собой электрические машины, где тяговыми двигателями выступают электродвигатели, а в качестве источника энергии для них используются, в основном, литий-полимерные аккумуляторные батареи.
Исходя из всего вышесказанного, проистекает основная проблема мультироторных электрических систем: малое время работы (ввиду гораздо меньшего соотношения ёмкости аккумуляторных батарей к их весу, то есть энергоёмкости, по сравнению с любыми топливными системами) и невозможность подзарядки аккумуляторов в полевых условиях, ввиду отсутствия такой возможности.
Кроме того, грузоподъёмность мультироторных систем оставляет желать лучшего. Они вполне годятся для перевозки небольших грузов, однако стоимость системы, которая сможет стать полноценным средством передвижения или перевозки пассажиров, будет достаточно внушительной. Справедливости ради, однако, следует отметить, что в последнее время начинают практически реализовываться идеи некоего летающего городского такси, которое как раз будет построено на основе мультироторной электрической системы.
Однако, как уже было сказано ранее, мультироторные системы появились не вчера, изначально они представляли собой исключительно системы на двигателях внутреннего сгорания.
И не так давно, в середине 2023-х годов появилось достаточно интересная система, которая «возвращалась к истокам» и представляла собой квадрокоптер бензинового типа — Nitro Stingray.
В отличие от своих электрических собратьев, эта система в своей основе имела в качестве силовой установки двигатель внутреннего сгорания, от которого крутящий момент передавался на все четыре несущих ротора:
Этот квадрокоптер отличался тем, что он имел один центральный двигатель, а присущая мультикоптерам подвижность,- обеспечивалась четырьмя винтами, с изменяемым шагом:
Ввиду высокой энергоёмкости сжигаемого топлива, этот квадрокоптер имел относительно небольшой вес, если сравнивать его с электрическими собратьями, высокую удельную грузоподъёмность, а также подвижность, о чём было сказано ранее.
В это же десятилетие отметились несколько известных проектов, которые пытались решить проблему недостаточной грузоподъёмности электрических устройств таким же путем, — использованием центрального двигателя и передачи крутящего момента, в то время как управление осуществлялось регулировкой шага винтов.
Одним из таких проектов является проект Incredible HLQ (Heavy Lift Quadcopter), который даже запускал свою кампанию на kickstarter com.
Вот что говорили о нём его создатели:
«Мы — группа студентов-механиков, работающих над нашим главным проектом в Государственном университете Сан-Хосе в Сан-Хосе, Калифорния. В состав группы входят 4 участника: Ник Коновер, Крис Фулмер, Карлос Герреро и Габриэль Теллез. Каждый из нас обладает особым набором навыков и специализируется в 2 различных дисциплинах: мехатроника и конструирование.
Мы проектируем и строим квадрокоптер с большой грузоподъёмностью (HLQ), который мы называем Incredible HLQ (звучит как «Халк»). Как и супергерой, HLQ сможет поднимать и транспортировать огромное количество веса для своего размера и стоимости. HLQ сможет автономно извлекать и доставлять 50 фунтов (~22,7 кг) полезной нагрузки.
Чтобы достичь цели в 50 фунтов, HLQ будет использовать трансмиссию, приводимую в действие двумя бензиновыми двухтактными двигателями мощностью около 12,5 л.с. каждый. Подъём будет осуществляться с помощью четырёх головок несущего винта коммерческого радиоуправляемого вертолёта с четырьмя лопастями диаметром 435 мм. Выбор этих лопастей был основан на реальных испытаниях подъёмной силы на нашем испытательном стенде, которые показаны в видео. Управление достигается за счёт использования управления переменным шагом винтов для изменения подъёмной силы каждого ротора.
Управление полётом будет использовать модуль DIYDrone Ardupilot APM2.5 . Ardupilot — это плата управления на базе Arduino с открытым исходным кодом для БПЛА. Он широко используется для многих летательных аппаратов с неподвижным крылом, вертолётов и многороторных летательных аппаратов и имеет подтверждённый послужной список.
Кроме того, мы будем использовать систему компьютерного зрения для идентификации и отслеживания полезной нагрузки с помощью библиотеки OpenCV на Roboard RB-110. RB-110 — это полноценный компьютер на одной плате. Он имеет 486-совместимый процессор с тактовой частотой 1 ГГц и может работать под Windows, Linux или Dos.
HLQ — дорогостоящий проект для большинства старших инженерных проектов в SJSU (Государственный университет Сан-Хосе). Затраты выходят за рамки того, что мы, студенты, можем себе позволить, и поэтому ваша поддержка имеет решающее значение для нашего успеха».
У проекта есть свой канал на YouTube, где они публикуют последние новости о разработках.
Несмотря на большое количество затраченного времени, в данный момент проект всё также находится в стадии разработки, последнее видео о новостях проекта вышло в мае 2020 года:
Ещё одним достаточно известным проектом является Goliath Mkll.
Проект стартовал примерно в то же время, что и первый, также в 2023 году и имеет свой канал на YouTube, но так же как и первый проект, — до сих пор находится в стадии разработки:
Достаточно долгое время идея бензиновых грузоподъёмных мультироторных систем пребывала в запустении, в течение всего десятилетия 2023-х. По крайней мере, не было ничего особо заметного, что бы громко заявило о себе в блогосфере или интернете в целом.
Однако, в последние 3-4 года, ситуация похоже сдвинулась с мёртвой точки, — разработчики похоже учли сложность создания системы с изменяемым шагом винтов, и пошли другим путём: один за другим стали появляться проекты, которые сочетают в себе преимущества двух подходов,- электрического и бензинового.
Как правило, эти проекты построены приблизительно по одной и той же схеме: классическая мультироторная система, где несущие роторы базируются на основе электрических двигателей, в то время как источником энергии для питания системы являются не аккумуляторы, а используется портативная бортовая электростанция внутреннего сгорания — для выработки электроэнергии.
Такого типа дроны позиционируются как средства для опыления полей от вредителей. Ввиду своей грузоподъёмности и большого времени работы, они могут брать на борт большой бак с жидкими инсектицидами и работать долгие часы, проходя большую площадь.
Хотя, кое-кто развивает и альтернативные технологии. Как, например, проект ниже, о котором, к сожалению, ничего не известно, кроме технических характеристик, показанных в видео. Мультикоптерная система, предположительно, имеет синхронизирующие валы между парами отдельных двигателей, для выравнивания их скоростей, проходящие внутри труб — каркаса. А управление осуществляется наклоном каждого конкретного двигателя:
В качестве заключения:
Некоторое время назад, вышло видео, где сноубордист, прицепленный к квадрокоптеру, катается на фоне заснеженных ландшафтов:
Неожиданный подход, продемонстрированный в видео, произвёл впечатление на многих и широко разошёлся по блогосфере. Однако любой, более-менее близко знакомый с технической стороной «коптеростроения», понимает, что построение подобного коптера, — обойдётся в круглую сумму!
Но благодаря продемонстрированному строителями сельскохозяйственных коптеров подходу, данная затея уже не кажется такой безумной!
Предположим некий мультикоптер, который может поднимать человека, построенный по электрической схеме, и питающийся от бортовой электростанции. Ввиду мультироторной схемы, такой коптер будет обладать высокой подвижностью, в то же время, обладая высокой грузоподъёмностью, что позволит использовать его для такого интересного применения как дрон-бординг (катание за дроном, на прицепе)! Или скажем, в качестве манёвренного мощного дрона, для доставки грузов.
Для снижения шума от работы двигателя бортовой электростанции, дрон может лететь на большой высоте, поэтому это не будет проблемой.
Стартап? Why not…

Мой взгляд на окраску траков – минимастеркласс : техники и секреты : статьи
Здравствуйте, коллеги!
Посетило вдохновение — решил поделиться опытом окраски и загрязнения гусениц. Эта статья в первую очередь ориентирована на начинающих танкостроителей, но надеюсь, и более опытные камрады откроют для себя что-то новое.
Итак, начнем. Перво-наперво собираем гусеницы. Тут, думаю, вопросов ни у кого нет — все предельно просто.
Далее надо красить. Как? чем? Ну, для начала я рекомендовал бы определиться, как будем делать танк: чистый или грязный. Если вы выбрали чистый вариант, то задача довольно проста: 2-4 цвета — и будет счастье. Хотя, если брать в качестве примера некое подобие памятника, то вообще нужен 1 цвет — черный Кузбасс лак: он же черный почти глянец. Но это скучно и не интересно. В качестве примера покажу, как я красил траки от Т-90 от фирмы Meng.
Внешнюю сторону задул акриловойкраской под тусклый металл. В данном случае это Mr.Color H18. Аналог от Tamiya X-10. Хотя, по правде говоря, тут может почти любой темный цвет: от серого до алюминия.

Так как танк у меня в процессе эксплуатации, то ржавчину на траках я обошел стороной, т.е. не изображал. Беговая дорожка на траках после небольшой езды (если траки не снабжены обрезиненной дорожкой) быстро “полируются”, так сказать, опорными катками. Это следующий этап окраски. Тут я воспользовался эмалевым металликом (металлайзером) от Gunze Mr.MetalColor №214: им задул внутреннюю часть гусеницы, а заодно беговую поверхность ленивцев.





После высыхания беговой дорожки отполируем её ватной палочкой по ширине опорного катка, а ленивцы — обычной бумажной салфеткой. Получился очень реалистичный результат: и не так ярко, и есть нужный блеск. В общем, рекомендую. Заменить можно каким-нибудь не очень ярким металликом, например XF-56 от Tamiya. Зубцы ведущего колеса покрасил SuperMetallic Mr.Hobby SM03 SuperIron



У нас остались не окрашенными гребни траков. Они обычно полируются до характерного блеска катками танка. Этот блеск я изобразил используя SuperMetallic Mr.Hobby SM06 ChromeSilver. Просто кисточкой.


Теперь даем этому всему высохнуть 30-60 минут и можно начинать грязнить.
В качестве грязи выступают разномастные пигменты (для цвета), алебастровая шпаклевка (для объема) и спирт в качестве растворителя.
Почему спирт? он хорошо текуч, и у меня есть доступ к нему)) на воде получается хуже, ибо текучесть не такая. Можно использовать какие-нибудь растворители вместо спирта, но тут надо смотреть на агрессивность растворителя к краске. Кстати дорогостоящие фирменные пигменты можно заменить на пастельные мелки натертые и перемешанные до нужного цвета. Обо всем по порядку. При грязнении гусениц следует учитывать, что они должны быть загрязнены в таком же стиле и оттенках, как и весь танк — это важно! Иначе будут смотреться как от другого танка.
Берем небольшую емкость (я использую пробку от пластиковой бутылки без внутренних ребер, бортов и т.д.), в нее засыпаем небольшое кол-во пигмента. Тут надо учитывать один момент: кол-во пигмента придет с опытом, я всегда делаю на глаз. Чем больше пигментов на пробку в отношении к спирту тем гуще получиться смесь. На разных этапах нам надо будет получать разной густоты смесь, но обо всем по порядку. Можно смешать несколько оттенков пигментов, чтобы получить нужный нам оттенок грязи.
Этап первый: заливка. Делаем базовый тон для грязи. Для этого делаем относительно жидкую смесь. Берем ненужную кисточку. Перемешиваем смесь в емкости и начинаем делать заливку. Просто макаем кисточку в смесь (не забывайте периодически перемешивать, иначе пигменты быстро выпадут в осадок) и капаем на траки в углубления. Чем гуще смесь, тем интереснее может получиться эффект. На танках, которые катаются по грунту, как правило углубления траков плотно забиты спрессованный грунтом – это и можно изобразить густой смесью. Если смесь протекла на внутреннюю сторону – это даже интереснее. Хаотичные эффекты наше все)





Даем высохнуть. Имейте в виду, что после высыхания смесь светлеет. После высыхания процедуру можно повторить более жидкой смесью другого оттенка. Остатки смеси можно использовать для запыления ходовой части и корпуса танка.


Этап второй. В аналогичную смесь добавляем алебастр, гипс или другой наполнитель, хоть песок. Наполнитель нужен для придания объема и структуры грязи. Оттенок пигментов используем отличающийся от базы. Берем ту же кисточку, размешиваем смесь. Далее нам нужен аэрограф. Подносим кисточку к внешней стороне траков и воздухом из аэрографа сдуваем смесь на траки. Будьте осторожны и положите под траки газету, ил коробку из-под модели. Чем больше на кисточке смеси, и чем ближе кисть к поверхности, тем крупнее будут капли и лужи грязи. Я обычно начинаю с крупных капель, постепенно переходя к более мелким, путем промокания смеси с кисти о борт емкости. Потом постепенно перехожу к совсем мелким каплям.
Тут важно соблюсти меру и проявить фантазию. Нанеся некоторое количество грязи на поверхность (траки, борта корпуса итд), в готовую смесь добавляю пигменты более светлого или более темного оттенков и продолжаю хаотично накидывать грязь.

В конечном итоге получается нечто подобное:
Этой же смесью имитирую загрязнения на самом танке
После высыхания нашей грязи, можно пройтись пальцем по выступающим частям траков, чтобы содрать грязь и получить легкий металлический блеск.
Здесь приведу пример нижней части корпуса танка: 









Грязь сделана вышеописанным способом, но в финале добавил чуть брызг AK Interactive AK017 (Earth effects) и AK Interactive AK016 (Fresh Mud). По большому счету эти жидкости представляют собой аналогичные готовые смеси, как описано выше. Единственное, последняя сатиновая. Что бы изобразить “мокрую” или “Влажную” грязь и пыль, не обязательно покупать готовые смеси (хотя с готовым продуктом всегда проще работать), вместо них можно использовать жидко разведенный глянцевый или сатиновый лаки. Капать и брызгать ими по необходимости.
В финишной отделке траков, уже на готовой модели можно добавить куски грязи, травинки и другие природные артефакты. Эти маленькие детали придадут больше реалистичности вашей модели.
В заключение скажу: не бойтесь экспериментировать. Смотрите фото оригинала. Не старайтесь повторить грязь один-в-один, она всегда по-разному ложиться на технику. Степень загрязнения машины можно довести до куска грязи вместо машины (и такое в жизни бывает). Смотрите сами.



В любом раскладе, если вы следовали моим советам (смесь на спирту), то высохшее всегда можно смыть, и повторить с нужным эффектом.
Я постарался показать способ, а не конкретную инструкцию. Способ крайне прост в применении, и на мой взгляд очень эффективен.
Спасибо за внимание, и за то, что дочитали до конца. Надеюсь, статья была полезна.
