

- Дальномерные системы
- Добыча железомарганцевых конкреций
- Запрос-ответ с распределенным приемником (комбинированный)
- Метод «запрос-ответ»
- Предварительная синхронизация
- Предложение
- Разностно-дальномерные системы
- Способы синтеза
- Строительство и ремонт линейных сооружений
- Телеуправляемые аппараты для подводно-технических работ – цифровизация – статьи журнала
- Технические характеристики аппаратов серии гном-4-150
- Технология подводных осмотровых работ
- Угломерно-дальномерные системы
Дальномерные системы
Дальномерные системы можно разделить на два типа систем, разница между которыми состоит в наличии информации о вертикальной координате искомого объекта или в ее отсутствии.
Где n — число опорных точек, минимальное значение для n=3,

— координаты опорных точек;

— времена распространения сигнала между искомым объектом и опорными точками;

— глубина искомого объекта.
Часто данный тип задач неверно именуют TOA (англ. Time-of-arrival — время прихода), что более подходит для задач, решаемых в разностно-дальномерных системах TDOA (англ. Time-Difference-On-Arrival — разность времен прихода), в то время как более правильное наименование TOF (англ. Time-of-flight — время следования, время распространения).
Для обоих типов систем имеют место четыре способа измерения времен распространения:
Очевидно, что надежности таких систем теоретически хуже, чем у угломерных, особенно в условиях сложного гидроакустического канала — такой системе для выработки одного решения требуется осуществить как минимум 3 успешных приема сигнала.
Системы, определяющие время распространения сигнала по методу a) наименее эффективны — каждая опорная точка должна измерить расстояние до искомого объекта по методу запрос-ответ (или наоборот, искомый объект поочередно запрашивает опорные точки).
Практическое применение таких систем ограничено из-за большого периода обновления координат и низкой энергоэффективности, но может быть эффективно применено в системах с виртуальной длинной базой. Как например, в нашем демо-проекте, где мы определяли местоположение одного из наших микромодемов плавая на приманочной лодочке с другим таким модемом.
В новой реинкарнации этого проекта код переписан на Arduino UNO, а решение навигационной задачи выполняется в приложении с открытым кодом.
Системы, работающие по методам b) и с) более эффективны и имеют лишь недостатки присущи системам с предварительной синхронизацией (b) — расхождение часов со временем и c инициированием по кабелю (с) — необходимость электрической или оптической связи (ограничения, связанные с наличием кабеля).
Системы с распределенным приемником, работающие по методу d) наиболее эффективны с энергетической точки зрения и имеют наибольшие перспективы.
Работа их происходит следующим образом:
Данная схема может быть использована для построения систем позиционирования, и имеет перспективы построения системы для теоретически неограниченной площади (настоящий подводный GPS без всяких оговорок!), путем оптимального выбора ведущей опорной точки (например, ближайшей к предыдущему вычисленному положению позиционируемого объекта).
В реальных дальномерных системах решение навигационной задачи может быть выполнено только оптимизационными методами. Как правило, применяется метод наибеднейших предков наименьших квадратов в какой-либо вариации.
Устойчивость решения сильно зависит от начального приближения и в целом значительно более стабильна в системах типа II, в виду того, что при известной вертикальной координате позиционируемого объекта задача переводится в плоскую. Фактически, на сегодняшний день, системы построенные по типу I, в подводной навигации не применяются в виду низкой надежности и точности.
На данный момент сложно привести пример чисто дальномерной системы, многие содержат в себе дальномерный метод как один из режимов (например эта). Производство, установка и использование систем на донной базе, как правило под силу лишь крупным производителям, приведу в качестве примеров наряду с уже упомянутой, системы эту, эту, вот эту и ту.
Из-за недостаточности информации сложно однозначно отнести какую-либо из упомянутых систем к одному из типов, с большой вероятностью все они в дальномерном режиме работают по типу IIа и, возможно IId. В [1] и [2] сообщается, что системы производителя EvoLogics работают по типу IId (с атомными часами).
Система Waterlinked GPS согласно заявлениям производителя представляет собой типичную короткобазисную систему, хотя, однако, нет точных данных работает ли она как угломерная система с полуакустическим измерением времени распространения, или функционирует как дальномерная, по типу IIc.
Добыча железомарганцевых конкреций
Железомарганцевые конкреции — аутигенные минеральные стяжения гидрооксидов железа и марганца, а также других элементов на дне озёр, морей и океанов. Наиболее широко распространены в пелагических районах Мирового океана. Впервые изучены английской экспедицией на судне «Челленджер» в 1872-76.
Подробные сведения о железомарганцевых конкрециях (пространственное размещение, фациальная обстановка формирования, петрография, минералогия и геохимия) получены в результате исследований дна Мирового океана, проведённых исследователями различных стран (Великобритания, CCCP, США, ФРГ, Япония и др.) в период Международного геофизического года (1957-1958) и в последующие годы.
Оцениваемые запасы трех океанов составляют 200 млрд т., в Атлантическом океане содержится 45 млрд т., в Тихом — 112 млрд т., в Индийском океане — 41 млрд т. Месторождения, залегающие на относительно небольшой глубине и являющиеся типичными разновидностями залежей марганца, встречаются на глубине до 400 метров недалеко от берега Байя, Калифорнии и Японии.
Фирма Nautilus Minerals Ltd. строит специальное судно для переработки руды, поднятой с дна океана [7].
Железомарганцевые конкреции Мирового океана в среднем содержат следующие рудные компоненты (%): Na 1,9409; Mg 1,8234; Al 2,82; Si 8,624; Р 0,2244; К 0,6427; Ca 2,47; Ti 0,647; V 0,0558; Cr 0,0035; Mn 16,02; Fe 15,55; Ni 0,480; Co 0,284; Cu 0,259; Zn 0,078; Sr 0,0825; Zr 0,0648; Mo 0,0412; Tl 0,0129; Pb 0,0900.
Характерно наличие Ag, Ir, В, Cd, Yb, W, Bi, Y, Hg и других элементов, концентрации которых значительно превышают средние значения для земной коры. По средним содержаниям основных рудных компонентов (Ni, Cu, Co, Mn) железомарганцевые конкреции в пределах отдельных изученных районов сопоставимы с рудами месторождений, разрабатываемых на континентах.
На поверхности руда выглядит так:
Совсем скоро обещают наладить промышленную добычу.
Запрос-ответ с распределенным приемником (комбинированный)
Данная вариация метода относится к длинно- и короткобазисным навигационным системам. Представим, что запрашивающая система содержит один передатчик и несколько приемников, часы на всех приемниках синхронизированны а их положения известны (особенно легко представить такую систему, если эти несколько приемников — плавучие буи, в каждом из которых есть GNSS-приемник, вырабатывающий географическое положение и обеспечивающий достаточно точный временной строб —
Теперь, по аналогии с обычным методом «запрос-ответ» время распространения 
Где

— время прихода ответного сигнала и время излучения запросного сигнала передатчика соответственно,

— фиксированная задержка ответа.
На следующем рисунке приводится пояснение к описываемой схеме:
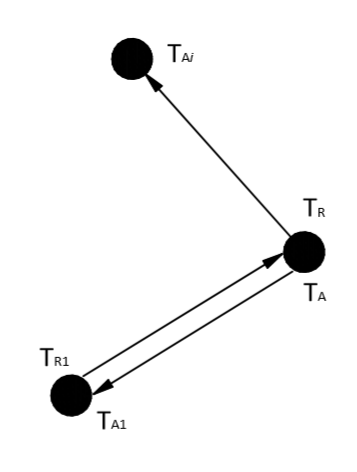
Определение времени распространения до всех элементов распределенного приемникаА время распространения  i-ого приемника будет соответственно:
i-ого приемника будет соответственно:
или
Где

— время прихода сигнала с запрашиваемой системы на
i
-ый приемник.
То есть, после завершения транзакции имеется набор точек с известными координатами и дальности до них, что по сути уже очень близко к длиннобазисной навигационной системе.
Метод «запрос-ответ»
Самый простой и очевидный подход — использовать так называемый метод «запрос-ответ». Суть его в следующем.
Пусть запрашивающая система излучает запросный сигнал в момент времени 
Данное положение показано на рисунке ниже:
Временная диаграмма определения времени распространения сигнала методом «запрос-ответ»
На следующем рисунке ситуация с запаздыванием выноса решения о детектировании сигнала рассмотрена более подробно:
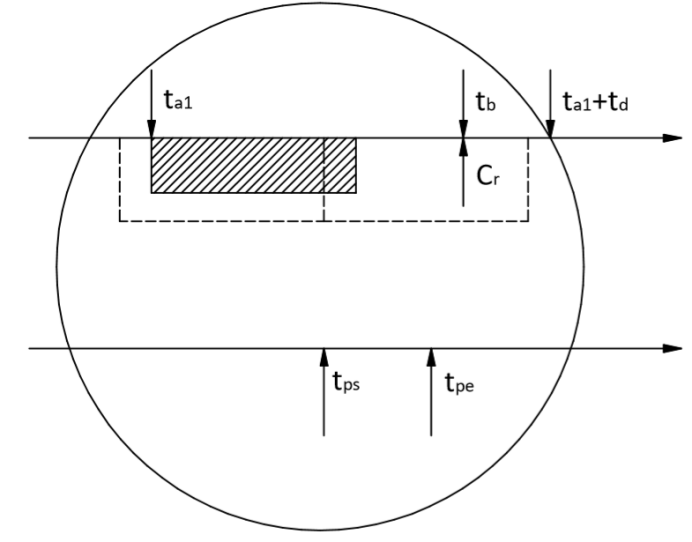
Запаздывание анализа сигнала. Штриховыми линиями показаны длительности окон обработки, заштрихованные области — полезный сигнал в кольцевом буфереФактическое начало анализа окна в котором содержится полезный сигнал происходит уже после того, как весь сигнал находится в кольцевом буфере, анализ длится от момента времени 




Здесь мы делаем допущение о том, что на протяжении всей транзакции расстояние между запрашивающей и запрашиваемой системами остается или постоянным или его изменение несущественно в рамках решаемой задачи.
Определение времени распространения таким способом широко используется в УКБ системах, системах с виртуальной длинной базой, длинной базой и некоторых других.
Из плюсов данного метода можно отметить:
Минусы данного метода:
Предварительная синхронизация
Или как еще его иногда называют — одностороннее измерение времени распространения, применяют когда либо одна из взаимодействующих систем по каким либо причинам не может излучать сигнал (к примеру, она пытается
обожебоже
акустически маскироваться!) либо когда время распространения слишком велико.
Подразумевается, что в какой-то момент времени часы всех взаимодействующих систем были синхронизированны.
В контексте данного метода уже не вполне некорректно применять термины «запрашивающая» и «запрашиваемая» система, поэтому для простоты будем использовать привычные «передатчик» и «приемник».
Фактически, при реализации данного метода могут иметь место два подхода:
— В первом, имеется всего один передатчик, излучающий навигационный сигнал через равные промежутки времени 

Здесь
— время прихода сигнала на приемник.
Если внимательно посмотреть на это соотношение, можно увидеть, что при помощи него нельзя измерить время распространения большее чем
Наряду с таким серьезным недостатоком вышеописанного подхода он имеет один крайне сильный плюс: таким образом можно организовать т.н. привод на маяк (передатчик) теоретически неограниченного числа приемников: представим, что синхронизировавшийся в какой-то момент приемник имеет антенную решетку, определяет дальность до приводного маяка и горизонтальный угол прихода сигнала.
Что очень удобно например, при решении задачи привода водолазов — они могут уходить от места сброса на ощутимые дистанции, и в случае всплытия в нескольких сотнях метров от точки сброса, плыть по поверхности с баллонами — занятие так себе.
Так что данный подход реализован, например, в нашей системе привода водолазов Vostok.
— Второй подход не накладывает никаких ограничений ни на количество передатчиков и практически не требует периодического излучения сигнала. В нем по прежнему фигурирует время синхронизации часов приемника и передатчика 
Глубоко не вдаваясь в подробности отметим, что минус у схемы с предварительной синхронизации ровно один — часы разных устройств достаточно быстро расходятся до неприемлемых величин.
Чтобы дать количественное ощущение насколько это быстро происходит, скажу, что с применением термостабилизированных кварцевых резонаторов расхождение в 7 миллисекунд накапливается в среднем за 1,5-2 часа.
Принимая в учет среднее значение скорости звука в воде (~1500 м/с), это расхождение приводит к ошибке определения дистанции ~10 метров.
В последнее время, кстати, коллеги сообщают об успешном применении миниатюризированных атомных часов (!), в которых указанная точность сохраняется недели[1][2].
В дополнение к методам с предварительной синхронизации можно упомянуть схемы, где первичная синхронизация обеспечивается методом «запрос-ответ».
К примеру, запрос инициирует на ответной стороне серию ответных сигналов, период которых составляет 

Теперь, для вычисления времени распространения
Где,
— время прихода очередного ответного сигнала по часам запрашивающей системы.
Такая схема обладает известной гибкостью: число ответов может быть явно указано в первом запросном сигнале, а сама схема позволяет работать с временным разделением нескольким абонентам.
В то же время, такой подход вносит определенную долю неоднозначности — если запрашивающая система пропускает прием первого ответного сигнала то работа останавливается до завершения всего цикла передачи ответных сигналов. А в дополнение к ошибке, связанной с уходом часов, добавляется ошибка первоначальной синхронизации.
В большинстве существующих систем ошибка определения наклонной дальности указывается в диапазоне от 1% до 0.1% от фактической наклонной дальности. Т.е. в среднем случае ошибка первоначальной синхронизации на дистанциях порядка 1000 метров может составить величину порядка 10 метров из-за нелинейности распространения звуковых волн в гидроакустическом канале, не принимая в учет ошибки, связанные с определением прямого луча (мифического «прямого сигнала», а не одной из его копий, отраженный от чего-нибудь).
Окей, с разными способами измерения времени распространения сигнала вроде бы разобрались, но этого явно недостаточно. Как еще отличаются навигационный системы? Как ни странно:
Предложение
Мы можем предложить следующие наборы для занятий подводной робототехникой:
Подробнее на
Центра робототехники
[1]
https://en.wikipedia.org/wiki/Freediving
[2]
https://topwar.ru/128503-vodolazy-tof-ustanovili-rekord-po-glubine-pogruzheniya.html
[3]
http://www.dive-tek.ru/archiv/2008/2/38-41.html
[4]
http://divingalmanac.com/deepest-saturation-dive-open-sea/#!
[5]
http://divingalmanac.com/deepest-saturation-dive-experimental/
[6]
http://www.nortech.com/pdf-subsea/Capjet trenching system.pdf
[7]
http://nus.live.irmau.com/irm/content/default.aspx
[8]
http://sophiccapital.com/wp-content/uploads/2023/02/Sophic-Capital-Second-Underwater-Drones-Report.pdf
Разностно-дальномерные системы
Данный вид систем с точки зрения измеряемых параметров подобен дальномерным системам, с тем лишь отличием, что вместо времени распространения сигнала
используются времена прихода сигнала
Придерживаясь принятой схемы, формализуем списки измеряемых параметров:
Где n — число опорных точек, минимальное значение для n=3,
— координаты опорных точек;

— времена прихода сигнала или от опорных точек на позиционирующийся объект (навигационные системы), или времена прихода сигнала от позиционируемого объекта на опорные точки (системы позиционирования).
Для разностно-дальномерных систем, в отличие от дальномерных нет такого многообразия подвидов, обусловленных разными способами измерения времени распространения. Вместо этого есть два основных способа построения цикла работы системы:
В системах, работающих по разностно-дальномерному принципу изначально использовался т.н. гиперболический режим, т.е. решение определялось как пересечение гипербол (или гиперболоидов), есть примерно стотыщмильенов работ по этой теме, которые усидчивый читатель без проблем найдет самостоятельно.
По аналогии с дальномерным методом,
На сегодняшний день сложно привести пример реально применяемых систем, работающих по типу I, кроме уже упомянутых устаревших LORAN-C и Чайки (тип Iб, не являющихся гидроакустическими, и глобальных систем позиционирования — GPS, GLONASS, Galileo, Beidou (тип Ia).
Напротив, систем, работающих по типу IIa достаточно много, например коммерческие, серийно выпускаемые наша RedWAVE, GIB SAR и EvoLogics, а так же более ранние, чисто исследовательские проекты[48].
Наиважнейшее преимущество разностно-дальномерных систем — возможность осуществления навигации неограниченного количества позиционирующихся объектов в случае с активной базой — по принципу GNSS, что, например, успешно реализовано в нашей RedWAVE.
Другое серьезное преимущество — возможность применения только приемной или только передающей базы, что, однако, можно сказать и о дальномерных системах с предварительной синхронизацией.
Как и дальномерные системы, разностно-дальномерные еще в большей степени чувствительны к работе вне навигационной базы. Функция невязки за пределами базы представляется собой уходящую на бесконечность пологую канаву, и найти там минимум вообще не проблема — его там можно найти практически в любой точке.
Говорят, на себе не показывают, но я не суеверный. Вот трек полученный пользователями нашей разностно-дальномерной навигационной системы RedWAVE c не самой удачной расстановкой буев (базовых, опорных точек) и очень неприветливой гидрологией:
На карте очень хорошо видно, что серьезные выбросы происходят исключительно вне фигуры, образуемой опорными точками (буями).
Способы синтеза
В некоторых задачах требуется одновременно иметь информацию о местоположении как на позиционирующемся объекте, так и на пункте управления. В качестве примера приведем управление стаей АНПА, как минимум на подходе к месту базирования, а также некоторые работы, решаемые при помощи водолазов.
Синтез навигационных систем и систем позиционирования может происходит по двум сценариям:
1) Акторы осуществляют взаимное позиционирование;
2) Решение, полученное в одном месте передается затем, в другое место при помощи электрического, оптического или гидроакустического каналов;
Второй сценарий технически наиболее просто реализуем и требует в целом более простого набора оборудования. Единственное серьезное ограничение состоит в необходимости временного разделения навигационной транзакции и передачи навигационных данных при использовании гидроакустического канала, а в случае применения другого типа канала — возникают ограничения связанные с наличием кабеля.
При работе по первому сценарию взаимное позиционирование может осуществляться, например, с помощью двух пленгационных антенн, когда дистанция измеряется по одному из описанных способов — «запрос-ответ», полуакустический или по предварительной синхронизации (УКБ УКБ). Другой способ — синтез систем с разной базой, например УКБ КБ, КБ ДБ, УКБ ДБ, КБ КБ.
Как правило, при использовании ДБ систем с донной базой, предварительное уточнение местоположения донных станций обеспечивается или при помощи надводной пеленгационной антенны (ДБ УКБ), при помощи КБ системы, расположенной на судне (ДБ КБ) или методом виртуальной ДБ (ДБ вДБ).
Еще один вариант синтеза — системы с изменяемой схемой работы. В качестве примера можно привести задачу привода и парковки (в т.ч. и автоматической) подводного аппарата. В режиме привода, распределенный массив приемопередатчиков, смонтированный на донной парковочной системе может работать в угломерно-дальномерном режиме, как т.н. обратная УКБ.
В этом случае подводный аппарат принимает сигналы от всех элементов измерительной базы и по задержкам определяет угол прихода сигналов. При подходе на близкое расстояние система может работать уже по дальномерной и/или разностно-дальномерной схеме, обеспечивая при этом максимальную точность, требуемую в режиме парковки внутри донной парковочной системы.
Прототип такой системы мы как раз испытывали пару недель назад в нашем пруду, было это как-то так:

Получили ворох данных, которые еще предстоит качественно обработать.
Строительство и ремонт линейных сооружений
Испанская электроснабжающая компания Red Eléctrica de EspaÑa внедрила систему передачи электроэнергии постоянным током высокого напряжения (HVDC), соединяющую остров Майорка с единой энергосистемой континентальной Испании.
244-километровая система линий электропередачи постоянным током высокого напряжения соединяет район Морведре (близ Валенсии) с деревней Санта-Понса, расположенной рядом со столицей Майорки — Пальма-де-Мальорка. Электрическая мощность 400 МВт передается по кабелю, идущему по морскому дну, потери на передачу постоянного тока минимальные: 250 кВт.
Как можно видеть на рисунке, при работе на глубинах были использованы специальные механизмы. Для укладки кабеля используется специальный аппарат capjet [6], укладка контролируется необитаемыми телеуправляемыми подводными аппаратами (ROV).
Примерно также происходит укладка кабелей связи:
Операция по подъёма истребителя F14 Tomcat с глубины 1140 м возле мексиканского побережья. Во время операции использовались телеуправляемые подводные аппараты.
Очистка дна от сюрпризов войны при строительстве северного потока:
Добыча нефти на шельфе:
Примерно также, с помощью телеуправляемых аппаратов осваивается штокмановское месторождение.
Так аппарат выглядит живьём:
Так им управляют:
А вот что при этом видит оператор:
Телеуправляемые аппараты (ROV) производятся разных классов с разной глубиной погружения. Есть те, которые можно опускать на 4000 м, есть те, которые нельзя больше 300 м, стоимость их также отличается на порядки. Если аппараты, которые пригодны для работы на большой глубине стоят от 1 млн. долларов, то аппараты, которые работают на глубинах до 300 м стоят несколько десятков тысяч долларов в промышленном исполнении.
Помимо телеуправляемых аппаратов используются автономные необитаемые подводные аппараты (AUV). В основном их используют для поисковых операций, до июля 2023 года с 2023 года в Индийском океане искали пропавший самолёт малазийских авиалиний с помощью таких аппаратов.
Автономные подводные аппараты используются для мониторинга состояния подводных линейных сооружений (трубопроводы, кабельные линии), для картографирования поверхности дна и проведения научных исследований на большой площади. Большинство автономных аппаратов выполняется в виде торпеды, чтобы уменьшить лобовое сопротивление воды и тем самым увеличить длительность работы под водой на одном заряде батарей.
Также создаются гибридные системы, т.к. автономные аппараты, которые можно подключить кабелем для подачи питания и получения изображения с камер и данных с датчиков в режиме реального времени. Предполагается, что в ближайшие 5 лет AUV вытеснят ROV при работах на шельфе и обследовании трубопроводов, т.к.
для работы с ROV требуется судно с динамическим позиционированием, которое может обходится до 250000 долларов в день, при этом работа промышленных AUV обходится в 30000 долларов в день [7]. Но для такой замены необходима мощная вычислительная бортовая система, производительная видеосистема, мощные и ёмкие аккумуляторы, точные датчики и сонары, а также разработка алгоритмов, которые смогут выполнять все те задачи в автономном режиме, которые выполняет оператор ROV в телеуправляемом режиме.
Телеуправляемые аппараты для подводно-технических работ – цифровизация – статьи журнала
Современное подводное строительство невозможно без широкого применения телеуправляемых необитаемых подводных аппаратов рабочего и инспекционного классов. Несомненным лидером по эффективному применению подводных аппаратов является ФГБУ «Морспасслужба». В 2023 году, ввиду увеличения количества подводно-технических работ, выполняемых с помощью ТНПА, в учреждении был создан отдел телеуправляемых подводных аппаратов. Изначально, круг задач ограничивался визуальным (видео) осмотром законсервированных и ликвидированных скважин. Учитывая перспективность данного направления, в последующие годы большое внимание было уделено развитию материальной базы и подготовке специалистов учреждения. В настоящий момент отдел реорганизован в Управление робототехники, инструментального и экологического мониторинга.
По состоянию на июнь 2023 года учреждение владеет самым многочисленным в России флотом судов с системой динамического позиционирования и продолжает увеличивать состав многофункциональных судов.

Парк ТНПА ФГБУ «Морспасслужба» уже сегодня насчитывает 10 аппаратов:
· ТНПА I класса по IMCA – Seamor 300T – 1 ед.;
· ТНПА I класса по IMCA – Нерей -350 – 1 ед.;
· ТНПА II класса по IMCA – Sperre AS SubFighter 7500 – 2 ед.;
· ТНПА II класса по IMCA – МСС-350(М) – 2 ед.;
· ТНПА III класса по IMCA – Sperre AS SubFighter 15K – 1 ед.;
· ТНПА III класса по IMCA – Sperre AS SubFighter 30K – 1 ед.;
· ТНПА III класса по IMCA – SAAB Seaeye Jaguar – 1 ед. ;
· ТНПА III класса по IMCA – SMD Quasar – 1 ед.
С помощью подводной робототехники учреждение выполняет круг задач там, где водолазы бессильны или возникают неоправданные риски, связанные с человеческой жизнью:
– обеспечение и сопровождение работ по бурению разведывательных и эксплуатационных подводных скважин;
– инспекционные работы различных конструкций и объектов, участков дна и гидротехнических сооружений с применением большого спектра навесного гидроакустического оборудования, включая гидролокаторы, многолучевые эхолоты, звуковизоры, а также многочисленных видеокамер и оборудования неразрушающего контроля, в том числе измеряющего катодный потенциал и остаточную толщину материалов;
– подводно-техническое сопровождение строительства и эксплуатации объектов подводных добычных комплексов (ПДК), в том числе монтаж и демонтаж, обслуживание и позиционирование, обеспечение контроля качества и работа с клапанами и заглушками;
– полный спектр глубоководных площадных поисковых работ, как в акустическом, так и в визуальном режиме, с высокой точностью координирования обнаруженных объектов;
– аварийно-спасательные операции, в том числе с возможностью разрезания стальных тросов диаметром до100 мм, остропка и расстропка подводных объектов, их перемещение, разработка и удаление грунта;
– обеспечение работ водолазов-глубоководников;
– исследовательские работы, в том числе сбор гидрологических данных и мониторинг окружающей среды.
Подготовка пилотов-операторов ТНПА для работы на подводных аппаратах ведётся в собственном учебном центре, оснащенном аппаратами типа «Seamor-300T» для проведения учебных погружений в бассейне и тренажером ТНПА рабочего класса для отработки первичных навыков выполнения подводно-технических работ. Обучение ведется по рекомендованной IMCA программе. За два предыдущих года в учебном центре ФГБУ «Морспасслужба» подготовлены 18 пилотов ТНПА, так же проведена подготовка пилотов для Министерства по Чрезвычайным ситуациям Российской Федерации.
Готовится к вводу в эксплуатацию самый мощный на сегодняшний день в России ТНПА рабочего класса Quantum XP мощностью 200 л.с. и рабочей глубиной до 3000 м. (Фото 1).

Фото 1. Телеуправляемый подводный аппарат рабочего класса Quantum XP ФГБУ «Морспасслужба»
До конца 2023 года будут введены в строй два первых российских ТНПА «МСС-3000», рабочего класса с глубиной погружения до 3000 м, изготовитель компания «МГ-Сервис». Спланированы к поставке для нужд учреждения четыре таких единицы. (Фото 2).
Фото 2. Телеуправляемый подводный аппарат рабочего класса МСС-3000 ФГБУ «Морспасслужба»
Телеуправляемые необитаемые подводные аппараты рабочего класса, принадлежащие ФГБУ «Морспасслужба» – это современные сложные многофункциональные устройства, способные выполнять самые разнообразные задачи на всех этапах проектирования, строительства и эксплуатации подводных трубопроводов.
В целях подводного строительства и подводных инспекций специалисты учреждения успешно применяют 3 аппарата рабочего класса (фото 3), 5 инспекционных и 2 осмотровых ТНПА.
С 2023 года учреждение является членом международной ассоциации морских подрядчиков (IMCA) в дивизионе подводных аппаратов (ROV), что позволило выйти на мировой рынок оказания услуг.

Фото 3. Телеуправляемый подводный аппарат рабочего класса Quasar MKII ФГБУ «Морспасслужба»
Так с 2023 года ФГБУ «Морспасслужба» с помощью подводной робототехники успешно оказывает услуги для таких мировых компаний как «South Stream Transport B.V.», «Allseas», «Nord Stream AG», «Subsea».
В ходе работ проведены изыскательские и подводно-технические работ на трубопроводах «Турецкий поток», «Северный поток-1» и «Северный поток-2». Глубины достигали 2200 м.
В ходе работ по трассе трубопровода специалистами ФГБУ «Морспасслужба» были выполнены батиметрическая и сонарная съемка на глубинах более 2000 м. (фото 4).

Фото 4. ТНПА Quasar MKII ФГБУ “Морспасслужба” с установленным гидролокатором бокового обзора и многолучевым эхолотом готовится к обследованию трассы трубопровода “Турецкий поток” на глубине 2000 м.
После гидроакустической съемки, с помощью ТНПА проводится визуальное обследование по трассе будущего трубопровода для определения возможных потенциальных опасностей и их устранения.
Потенциальные опасности для подводных трубопроводов включают в себя взрывоопасные объекты, объекты, представляющие навигационную опасность, опасные элементы рельефа. Только в марте 2023 года, в ходе проведения работ по трассе трубопровода «Северный поток-2», специалистами ФГБУ «Морспасслужба», были обнаружены, размыты и убраны с трассы трубопровода 3 морских мины, 2 торпеды, 2 якоря минных заградителей, осмотрены и идентифицированы более 40 предметов (фото 5).

Фото 5. Взрывоопасные предметы, поднятые специалистами «ФГБУ «Морспасслужба» по будущей трассе трубопровода «Северный поток»
На этапе укладки трубопровода ТНПА ФГБУ «Морспасслужба» выполняют целый комплекс подводно-технических работ – от визуального контроля укладки трубопровода на грунт до работ по демонтажу понтонов и иной инструментальной оснастки, применяемой в процессе строительства (фото 6).

Фото 6. Работы по укладке трубопровода “Турецкий поток”
В 2023-2023 годах учреждение при оказании услуг компании «Allseas» выполнило работы по укладке завершающего участка трубопровода «Турецкий поток», в том числе были оказаны услуги по визуальному и приборному мониторингу трубопровода, проведен контроль параметров протекторной защиты.
В последние годы продолжается расширение зоны применения ТНПА ФГБУ «Морспасслужба», большое внимание уделяется работам при строительстве эксплуатационных и разведочных скважин на Арктическом шельфе РФ. С помощью ТНПА рабочего класса, оснащенного многостепенными манипуляторами, 5-7 степеней свободы и специальным сменным инструментом (фото 7) выполнены работы по очистке от обрастаний кингстонных решеток буровых платформ «Орлан» и «Беркут» без остановки производственной деятельности. Выполнено обследование подводных оснований платформы МЛСП «Приразломная», замена задвижек и контрольного оборудования, ремонтные операции.
В 2023 году совместно с компанией «South Stream Transport B.V.» проведена внутритрубная диагностика трубопровода «Турецкий поток».

Фото 7. ТНПА Jaguar ФГБУ “Морспасслужба”, оснащенный специальным инструментом для размыва грунта.
В настоящее время ТНПА ФГБУ «Морспасслужба» позволяют проводить весь комплекс необходимых подводно-технических работ на любом этапе строительства и эксплуатации подводных скважин и трубопроводов.
Широкое применение ТНПА при строительстве и эксплуатации позволяет минимизировать затраты, сократить тяжелый и опасный водолазный труд, а также значительно повысить промышленную и экологическую безопасность.
Статья «Телеуправляемые аппараты для подводно-технических работ» опубликована в журнале «Neftegaz.RU» (№8, 2023)
Технические характеристики аппаратов серии гном-4-150
- Число движителей – 4;
- Скорость: горизонтального движения – до 1 м/с; вертикального движения – до 0,5 м/с;
- Рабочая глубина – 100 м, предельно допустимая – 120 м;
- Длина кабеля – до 200 метров;
- Тип кабеля – радиочастотный РК50, специально упрочненный кевларом в полиэтиленовой оболочке, плавучесть кабеля – отрицательная;
- Диаметр кабеля – 3 мм;
- Усилие на разрыв – 50 кг, функциональные повреждения – при усилии больше 25 кг;
- Осветители: 35 светодиодов белого свечения,
плавная регулировка яркости переднего и боковых осветителей; - Видеокамера – цветная PAL CCD, 0.5 лк, 450 твл;
- Блок питания и управления: сеть 220 В; встроенный аккумулятор 7-12 АЧ, напряжение батареи индицируется на экране;
- Влажность окружающей среды – до 100%;
- Диапазон рабочих температур – -5 … 45 о С;
- Конструктивное исполнение – переносное, в чемоданах Pelican;
- Вес подводного аппарата – 3 кг, полной системы – 18 кг;
- Размеры подводного аппарата 320х150х120 мм;
- Оснащен датчиком глубины (точность 10-20 см) и компасом c выводом информации на видеомонитор в режиме “телетекст”. Режим автоматической стабилизации глубины “автоглубина”.
- Имеет небольшую положительную плавучесть за счет пенопластового поплавка. Регулируется с помощью балласта в полозьях аппарата.
Движители сделаны на базе отечественных электромоторов постоянного тока серии ДПР. Для передачи вращения с электромотора, помещенного в корпус, на ось гребного винта используется дисковая магнитная муфта, позволяющая существенно сократить потери мощности по сравнению с сальниковым уплотнением.
Управляет работой аппарата бортовой микрокомпьютер, принимающий команды через кабель связи. Он также обрабатывает данные с датчика глубины, компаса и осуществляет коммуникацию (в модулированном цифровом коде) с блоком управления. Информация с датчиков ГНОМа выводится на экран монитора оператора в режиме “телетекст” (наложение алфавитно-цифровых данных на видеокартинку), включая многоуровневые меню режимов работы, настройки и калибровки.
На сегодняшний день выпущено несколько десятков аппаратов ГНОМ. Наибольшее распространение получил ГНОМ-4-150, рассчитанный на работу на глубинах до 120 м при длине кабеля до 200 м (рис. 2). Подводный аппарат модели 4-150 весит 3 кг, потребляет 120Вт и развивает горизонтальную скорость около двух узлов.
Наличие двух вертикальных моторов обеспечивает вертикальную скорость около 1 узла, возможность наклонять аппарат и двигать его под наклоном вверх-вниз. Пульт управления может работать и по беспроводному интерфейсу (радиоканалу). Система полностью автономна и может транспортироваться одним человеком.
ГНОМы данной модели успешно эксплуатируются уже более трех лет и весьма часто на предельных глубинах, поскольку аппарат, в отличие от упомянутых аналогов, не теряет маневровых возможностей с ростом глубины. Модель постоянно совершенствуется, развивается комплект оснащения, включая вторую камеру (устанавливается вместо заднего вертикального движителя), лазерные указатели, высокие полозья, захват, дополнительные осветители, датчик температуры. В последних моделях камера имеет сервопривод наклона, что важно при осмотрах дна водоема, а также днищ и бортов судов.
В настоящее время заканчивается разработка модели Супер ГНОМ 300 (рис. 3) с глубиной работы до 250 м, оснащенный гидролокатором Micron фирмы Tritech и мини-захватом с круговым вращением. Первоначально был создан и испытан образец на базе модели 4-150 с удвоенным числом горизонтальных моторов, в отличие от предыдущей модели.
Для Супер ГНОМа создается подводный гараж с лебедкой, опускаемый с судна на кабель-тросе и фиксируемый на дне. Подобная схема работ наиболее эффективна для работ на глубинах больше 50-70 м – не мешает поверхностное волнение, и не “парусит” кабель, протянутый сквозь толщу воды. Кроме того, в Супер-ГНОМе есть возможность подключения ряда сенсоров для измерения параметров воды.
Также для широкого применения создана самая миниатюрная модель – ГНОМ-3-50 (рис. 4), которая представляет собой 3-х моторный аппарат весом менее 2 кг с двумя горизонтальными и одним вертикальным движителями. Цветная видеокамера аппарата помещена в полусферу из оргстекла, по одножильному коаксиалу передается питание 48 В, видеосигнал и команды управления.
Подготовка к работе системы занимает несколько минут – подключение питания, кабелей связи, монитора, размотка кабеля. Аппарат опускают в воду и направляют на объект: либо погружая сразу, либо двигают по поверхности воды, а затем погружают, активизируя разные движители.
Скорости плавно регулируются от значения 0 до максимума, при этом вектор движения, относительные значения скоростей и их изменения отражаются на экране. Для тщательного осмотра объекта имеются режимы «малого хода», поддержки постоянной скорости, а также режим стабилизации аппарата на нужной глубине.
Уже первые аппараты были использованы для изучения поведения млекопитающих в московском дельфинарии учеными Института океанологии. Дельфины встретили ГНОМа миролюбиво, а вскоре потеряли к нему интерес, крайне аккуратно относясь к кабелю, не задевая его.
В 2000 году аппараты ГНОМ были испытаны в экспедиции МЧС по осмотру затонувшей баржи в Балтийском море. В 2002 году поучаствовали в экспедиции МЧС на Байкале с целью поиска и осмотра затонувших судов, провалившихся под лед автомобилей на зимней переправе к острову Ольхон, и показали высокую эффективность при проведении работ, как с борта судна, так и с моторной лодки.
Тогда же впервые оператор смог провести ГНОМ внутрь кабины затонувшего на глубине 38 м автомобиля через приоткрытое боковое стекло и осмотреть ее (рис. 5 а-б), управляя аппаратом с судна, стоящего на якоре на расстоянии 50-60 м от объекта. Ориентация осуществлялась по компасу.
Кабель, имеющий отрицательную плавучесть, ГНОМ вытягивал по дну. При приближении к объекту оператор проводил аппарат на 7-10 м дальше от него для того, чтобы при осмотре тянуть за собой только этот кусок кабеля. В этом случае остальная часть не сдерживает движения аппарата. Яркость осветителей оказалась вполне достаточной для подробного осмотра.
В отличие от простого наклона камеры, используемого в ряде аппаратов, например, в VideoRay, где свет направлен только вперед и не следует за камерой, у ГНОМа наклон аппарата направляет туда же и свет.
В этой экспедиции ГНОМы в большинстве случаев заменили водолазов, которым осталась только работа по подъему объекта в случае установления потенциальной опасности. Объект сначала находился и осматривался ГНОМом, затем по его кабелю водолаз быстро спускался точно на цель, не тратя драгоценное время на поиски.
Аппараты все шире входят в практику океанологических и экологических исследований. В Институте океанологии они используются гидробиологами для изучения донной флоры и фауны (рис. 7), проводятся подводные наблюдения за белухами, морские геологи их применяют для изучения дна, дополняя данные гидролокационной съемки.
Дальнейшее усовершенствование аппаратов планируется в следующих направлениях:
- Аппараты для профессионального применения: уже реализованный вариант ГНОМа с двумя видеокамерами, повышение мощности движителей, увеличение освещенности, оснащение гидролокатором, создание недорогой системы акустической навигации, доработка аппарата для глубин 200 м и более. Все выполняется без ощутимого увеличения размеров.
- Создание упрощенных дешевых аппаратов для исследователей подводного мира, любителей подводных съемок, а также владельцев катеров и яхт – с еще более меньшими размерами, более тонким кабелем.
- Создание уникальных комбинированных рабочих систем на базе разработанной для ГНОМа технологии. Одна из них – двухзвенный поисково-осмотровый комплекс на базе ROV-носителя (рис. 9). Комплекс уже реализован и испытывается. В качестве ROV-носителя использован модернизированный ROV Sealion компании Fisher. На Sealion размещается ГНОМ, который может запускаться с большого аппарата для осмотра труднодоступных мест, когда становится необходим малогабаритный ROV. Cистема имеет открытую архитектуру на базе Ethernet интерфейса, в которую могут быть интегрированы разнообразные устройства, имеющие ряд стандартных цифровых и аналоговых интерфейсов. В систему установлен и интегрирован гидролокатор Miniking.
Планируется оснащение ГНОМа системой акустической навигации – два гидрофона, опускаемые с борта судна, и транспондер. Заканчивается разработка системы дистанционной работы с ГНОМом через локальную компьютерную сеть, в том числе Интернет, – это позволит размещать аппараты на морском дне и вести долговременный мониторинг, сохраняя возможность дистанционного управления перемещением аппарата.
В одном из предполагаемых вариантов он может получать питание и передавать видео/данные/управление через проложенный на дне кабель (международные проекты NEPTUN и MARS). В другом варианте на поверхности воды должен быть заякоренный буй с подзаряжаемыми батареями, а трансляция видео и управление идет через спутниковый канал.
Журнал «Подводные технологии и мир океана»Октябрь 2005 г.
Технология подводных осмотровых работ
В течение последних пяти лет, наряду с использованием крупных и дорогих телеуправляемых подводных роботов, требующих при эксплуатации специальные суда-носители со спускоподъемными устройствами, в мире наметилась тенденция широкого использования подводных миниаппаратов, предназначенных для поисково-осмотровых работ на глубинах до 300 м.
Она сопровождается снижением цен на аппараты и на выполнение глубоководных работ в целом, а соответственно повышением доступности, как для профессионалов, так и простых любителей подводного мира. Цель проекта ГНОМ – создание семейства недорогих, малогабаритных, так называемых «персональных» ТПА с широким спектром применения.
Современные компьютерные и телекоммуникационные технологии на базе последних достижений микроэлектроники и высокочастотной техники позволили значительно уменьшить размеры подводных аппаратов, потребляемую мощность, обеспечить автономное питание и простоту управления.
Основная функция аппаратов семейства ГНОМ – проведение подводных поисково-осмотровых работ на глубинах до 150 м. Отличительными чертами являются легкость транспортировки, простота использования, быстрое развертывание и высокая маневренность.
Малые габариты – объем 1-3 дм3 – и тонкий кабель – диаметр 1-2 мм – позволяют осматривать подводные объекты не только снаружи, но и проникать внутрь. Питание от батареи и встроенный плоский жидкокристаллический монитор обеспечивают полную автономность работы. Проводить подводные осмотры можно с маломерных судов, яхт и обыкновенных лодок.
В 90-х годах прошлого столетия ряд фирм – JW.Fishers Inc (США), Hydrovision (Великобритания), Inuktun (Канада) – начали создавать так называемые мини-ROV (Remote Operated Vehicle – дистанционно управляемый аппарат). Первые малогабаритные аппараты весили порядка 30 кг, имели кабель диаметром 15-20 мм, скорость движения составляла 2-3 узла.
В состав входили: видеокамера, осветители на галогенных лампах, позже добавились измерители глубины, компас. В качестве движителей использовались электромоторы постоянного тока. Аппараты потребляли 1-1.5 КВт и питались от обычной электросети, а пульт управления был оснащен телевизором или монитором.
Эти мини-ROV погружались на глубины до 50-150 м. Однако многожильный кабель связи и питания создавал ряд проблем: по мере размотки больше мощности тратилось на его вытягивание, затруднялось движение аппарата, снижались маневренность и возможность стабилизации, что крайне важно при осмотрах.
Проработка возможностей использования новых технологий специалистами Института океанологии им. П.П. Ширшова показала, что можно создавать аппараты с еще меньшими размерами (микро – ROV), вплоть до размеров мыльницы, и в несколько раз меньшим энергопотреблением при сохранении таких же значений скорости.
Такие аппараты смогли бы проводить обследования, проникая внутрь затонувших объектов, что невозможно было делать до сих пор. Наиболее перспективным представлялось использование тонких одножильных коак-сиальных и оптоволоконных кабелей, сверхярких светодиодов с высоким КПД и практически неограниченным ресурсом работы, бескорпусных миниатюрных видеокамер и бортовых микрокомпьютеров. На основе этих компонентов и были разработаны аппараты семейства ГНОМ (рис.1).
Система ГНОМ состоит из основного аппарата, кабеля, надводного блока и ручного пульта управления Sony. Подводный модуль выполнен в виде герметичного алюминиевого цилиндра с иллюминатором для видеокамеры. К цилиндру прикреплены четыре мини-электродвижителя с пропеллерами (два горизонтальных – по бокам аппарата, два вертикальных – вдоль корпуса) и поплавок из пенопласта для придания аппарату нейтральной плавучести.
Внутри цилиндра размещены цветная видеокамера, осветители на светодиодах и блок электроники, а также электронный компас и датчик глубины, мембрана которого выходит наружу. Надводный блок включает источник питания, электронику передачи команд, данных и видео, пульт управления (джойстик).
Существует вариант блока с плоским видеомонитором. Имеется также стандартный видеовыход (разъем «Тюльпан») для подключения к устройству записи и воспроизведения, например, обычному телевизору или видеомагнитофону. Электропитание автономное – 12 В (встроенный или внешний аккумулятор), либо внешнее – 220 В.
Вся система с пультом управления размещена в двух переносных ударопрочных чемоданах Pelican: в одном – аппарат с катушкой кабеля, в другом – блок питания/управления и пульт, там же предусмотрено место для мини-аккумулятора 12В/12АЧ и зарядного устройства.
Угломерно-дальномерные системы
Данный тип систем определяет положение позиционируемого объекта в полярной системе координат и характеризуются следующими наборами измеряемых параметров:
Где

— координаты опорной точки (долгота, широта, глубина),

— горизонтальный и вертикальный углы прихода сигнала соответственно,
— вертикальная координата (глубина, расстояние от поверхности воды) позиционируемого объекта, а
— время распространения сигнала между опорной точкой и позиционируемым объектом.
Как было показано выше, время распространения может в каждом из двух типов определятся по трем общим принципам:
Отметим, что углы
для простоты исчисляются в глобальной системе координат (т.е. отсчитываются от истинного направления на север по часовой стрелке и от горизонтали вниз соответственно).
Я долго сомневался, стоит ли добавлять в статью большие формулы. В конечном счете, те, кто просто испытывают праздное любопытство могут не открывать спойлер, а какой-нибудь студент, которому это реально поможет — будет спасен. Никакой лишний абзац не стоит слезинки студента!
В целом, задача определения углов прихода сигнала может быть формализована следующим образом:
Навигационная задача в таких системах решается в два этапа:
- Определение проекции
 наклонной дальности r на поверхность воды (дальность в плане);
наклонной дальности r на поверхность воды (дальность в плане); - Решение прямой геодезической задачи — нахождения положения искомой точки по дирекционному углу и дистанции; а именно
 ;
;
Для типа I определение проекции
наклонной дальности и глубина
искомого объекта определяются из тривиальных тригонометрических соотношений:
Где r определяется еще более тривиально из времени распространения
и скорости звука

Определение положения искомого объекта — координаты

получаются как решение прямой геодезической задачи на эллипсоиде.
Вычислительно эффективные решения, обеспечивающие максимальную точность известны из работ Содано[3] и Винценти[4], и в простонародье так и именуются «Формулы Винценти». Здесь для проформы простоты приведу простое решение для сферы, дающее расхождение на дистанция в единицы километров, не превышающее 0.5 метра:
Где

, а

— стандартное значение земного радиуса[5].
В приведенной зависимости все значения углов в радианах. Для перевода долготы 
В качестве примеров систем, работающих по типу Ia можно привести
Систем, работающих по типу IIa — наша
. При этом говорят, что MicronNav также может работать в режиме как система типа IIc.
В качестве систем, работающих по типу IIb можно привести наш водолазный привод Vostok, а также в [1,2] сообщается об использовании миниатюрных атомных часов для обеспечения длительной синхронизации в системах фирмы EvoLogics.de.

