

- Описание:
- Робототехника может стать стартовой площадкой для школьников, “горящих” техническими науками
- . Блог
- . Каталог товаров, услуг и решений
- . Условия оформления заказа в Каталоге
- Условия использования материалов, размещенных на Портале
- 3: Терминология ходовых частей
- Автоматическое управление движением робота днем и ночью:
- Движение и состояние робота для плоскости
- Драйвер двигателей
- Интегральное движение на плоскости
- Колёсные и гусеничные роботы
- Конструкция, шасси и двигатели робота на ардуино
- Отечественный разработчик автономных роботов-шасси или наш ответ автомобилям google
- Питание робота
- Планирование маршрута
- Подключаем bluetooth к машинке
- Подключаем двигатели и плату
- Применение:
- Пример платформы робота-машины на ардуино
- Программирование пути движения колесного робота:
- Робот на ардуино своими руками
- Робот с дифференциальным приводом
- Степени свободы движения
- Схема электропитания робота автомобиля
Описание:
Автономный колесный робот SRX1 способен совершать автоматические проезды по запрограммированному маршруту без участия человека. Робот создан для движения по дорожкам, покрытие которых обеспечивает надежное сцепление шин с поверхностью. Это может быть асфальт, бетон, гравий или сухой грунт.
Робот не предназначен для движения по автомобильным дорогам общего пользования. Наилучшая скорость и надежность перемещения достигается на безлюдных территориях. Его эксплуатация затруднена, а порой и невозможна во время регулярного движения людей и транспортных средств.
Автономные наземные колесные роботы имеют обширные перспективы использования в повседневной жизни людей. Они становятся надежными помощниками при выполнении профессиональных и бытовых задач. В отличие от антропоморфных человекоподобных роботов, колесный робот имеет доступную цену.
Робототехника может стать стартовой площадкой для школьников, “горящих” техническими науками
Сам процесс роботостроения позволяет развить несколько компетенций за раз, более того, применить свои практические навыки сразу в нескольких дисциплинах.
Удивительно наблюдать, как любовь детей к определенному предмету растет благодаря новым возможностям. И даже у тех, кто не горел особыми чувствами к математике или физике.
Некоторые из учеников проявляют интерес к 3D-печати, программированию и даже доходят до любимых занятий юности их родителей и дедушек: разбору и сборке бытовой техники (чей папа в детстве не разбирал радио или часы?). Вы можете наблюдать самостоятельно, как школьники выстраивают собственную траекторию обучения, потому что робототехника – по-сути, предоставляет им открытую платформу для творчества и экспериментов.
Если вы уже используете современные образовательные технологии на своих уроках, то рады пригласить к участию во всероссийском конкурсе iУчитель-2023. Прием заявок продлится до 11 февраля.
. Блог
Сервис предоставляет авторизованному Пользователю, при условии внесения пользователем требуемых данных в Личном кабинете, возможность размещать и распространять контент на Портале, а также удалять размещенный им контент.
Пользователь самостоятельно несет ответственность за нарушение законодательства Российской Федерации перед третьими лицами за свои действия, связанные с размещением и распространением контента на Портале, в том числе за то, что содержание Контента соответствует требованиям применимого законодательства и не нарушает права и законные интересы третьих лиц.
Пользователь понимает и соглашается с тем, что Контент не должен нарушать авторские права, права на товарные знаки, средства индивидуализации и/или иные интеллектуальные права, принадлежащие третьим лицам, а так же другие требования законодательства Российской Федерации.
Пользователь самостоятельно и за свой счет обязуется урегулировать все претензии третьих лиц, связанные с размещением им Контента. В случае возникновения спорной ситуации бремя доказывания того, что размещаемый Пользователем Контент не нарушает чьих-либо прав, лежит на таком Пользователе.
Пользователь признает и соглашается с тем, что Администрация не обязана просматривать контент, размещенный Пользователем на Портале, а также то, что Администрация имеет право (но не обязанность) по своему усмотрению отказать Пользователю в размещении и/или распространении им контента, или удалить любой контент, размещенную Пользователем на Сервисе без указания причин.
Пользователь не вправе размещать и распространять контент, содержащий следующую информацию:
. Каталог товаров, услуг и решений
Каталог товаров, услуг и решений – составная часть Портала, содержащая информацию о товарах, работах, услугах и решениях для сферы образования, воспитания и обучения.
Портал и / или Администрация не выступают владельцами и не обладают никакими правами на товары, представленные в Каталоге, а равно не являются стороной в правоотношениях, возникающих из действий Пользователей по приобретению / заказу товаров, работ, услуг, решений посредством Каталога.
Все отношения между Порталом (Администрацией) и поставщиками (продавцами) регулируются отдельны договором и / или публичной офертой и находятся вне пределов действия настоящего Соглашения.
Портал предоставляет Пользователю бесплатную возможность поиска информации о товарах, ознакомления с товарными предложениями продавцов, возможность получения (в т.ч. по результатам поиска) релевантных интересам Пользователя товарных предложений и информации, а также иные функциональные возможности, явно доступные Пользователю.
Ставить оценки товарам и оставлять отзывы может только зарегистрированный Пользователь. Пользователи не могут изменять (редактировать) и удалять свои оценки и отзывы.
. Условия оформления заказа в Каталоге
Портал и / или Администрация не выступают владельцами и не обладают никакими правами на товары, представленные в Каталоге, а равно не являются стороной в правоотношениях, возникающих из действий Пользователей по заказу товаров, работ, услуг, решений посредством Каталога
В Каталоге Пользователям доступна база данных, которая представляет собой информационно-справочную систему, содержащую информацию о товарах/услугах, предназначенную для потенциальных покупателей/потребителей товаров/услуг. Информация о товарах/услугах, представленная в Каталоге, основана на информации, предоставленной продавцами (поставщиками).
Каталог предназначен исключительно для ознакомления и предварительного заказа товаров, услуг и решений. Никакие оплаты через Каталог не производятся и никакие сделки напрямую в Каталоге не совершаются.
Каталог так же позволяет запросить у Продавца пакет документов, необходимый пользователю для оформления поставки товаров / работ / услуг в порядке государственной закупки и иные документы, необходимые для совершения сделки. Данные документы предоставляются Пользователю непосредственно Продавцом (Поставщиком), Портал и Администрация не несут ответственности за достоверность и корректность указанных документов.
Любое общение, в том числе с использованием средств в Личном кабинете Пользователя, с поставщиком (продавцом) товаров, работ, услуг признается непосредственной перепиской между Пользователем и указанным лицом. Портал и / или Администрация ни в коей мере не могу участвовать или выступать стороной в указанном общении и / или нести какую-либо ответственность из (за) отношений / действий, вытекающих из указанного общения.
Условия использования материалов, размещенных на Портале
Под использованием материалов понимается воспроизведение, распространение, публичный показ, сообщение в эфир, сообщение по кабелю, перевод, переработка, доведение до всеобщего сведения и иные способы использования, предусмотренные действующим законодательством Российской Федерации.
Портал содержит материалы, товарные знаки и иные охраняемые законом материалы, включая, но не ограничиваясь, тексты, фотографии, видеоматериалы, графические изображения, музыкальные и звуковые произведения.
При этом все содержание сайта охраняется законом как произведение науки, литературы и искусства, созданное коллективным творческим трудом в соответствии с положениями 4 части Гражданского кодекса Российской Федерации.
Владельцу принадлежат исключительные права на использование содержания Портала, которые были переданы ему на основании настоящего Пользовательского соглашения авторами произведений науки, литературы и искусства (в том числе, право на подбор, расположение, систематизацию и преобразование данных, содержащихся на Портале, а также на сами исходные данные), кроме случаев, отдельно отмеченных в настоящем Соглашении и / или в содержании опубликованных на Портале материалов.
Использование любой информации с Портала в любых целях, кроме как в личных, без согласия Владельца не допускается.
Распространяется бесплатно.
3: Терминология ходовых частей
Ниже приводится терминология, необходимая учащимся в процессе изучения различных типов ходовых частей.
ВЕДУЩЕЕ КОЛЕСО – колесо, мощность которого передается и используется для продвижения робота вперед. Не все колеса являются ведущими, некоторые колеса не используются для создания движения робота.
ТОЧКА ПОВОРОТА – точка, вокруг которой поворачивается робот.
ПОВОРОТНЫЙ СКРАБ – трение, создаваемое колесами при их боковом волочении по окружности в процессе поворота робота. Поворотный скраб сопротивляется повороту робота.
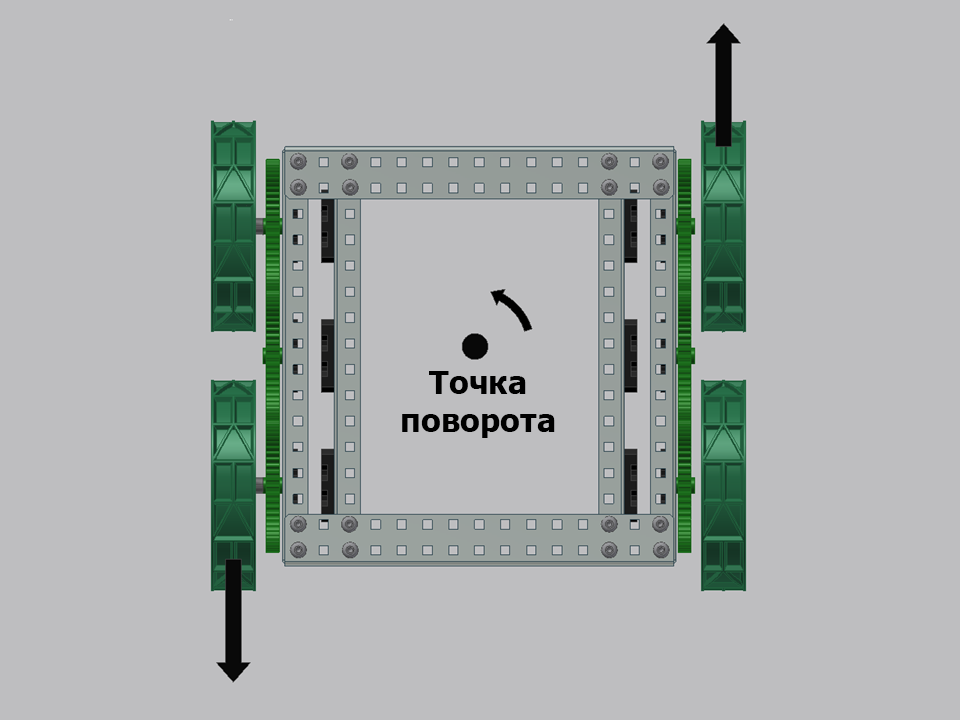
ПОВОРОТ НУЛЕВОГО РАДИУСА – поворот, когда робот поворачивается на месте, не продвигаясь при этом вперед. При выполнении поворота нулевого радиуса, точка поворота находится в центре робота.
ШАССИ – конструкция робота, удерживающая колеса, электромоторы и зубчатые механизмы на месте.
ТИПЫ ХОДОВЫХ ЧАСТЕЙ:
В робототехнике используется ряд ходовых частей различных типов. Все они имеют преимущества и недостатки. Ниже описываются наиболее распространенные из них.
Рулевое управление Аккермана:
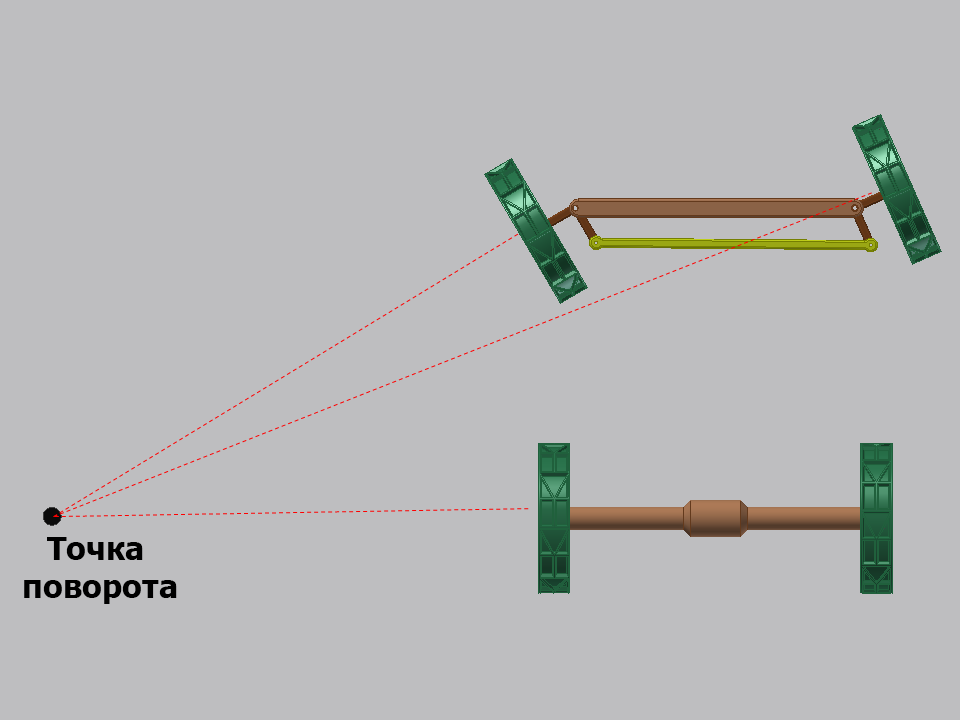
В приводе этого типа все колеса перемещаются в одном направлении: вперед или назад. Управление осуществляется путем поворота колес таким образом, что все колеса располагаются по дуге вокруг одной точки поворота (turning point).
Одним из преимуществ этой конфигурации является отсутствие поворотного скраба. Тем не менее, главный недостаток заключается в неспособности выполнять поворот нулевого радиуса.
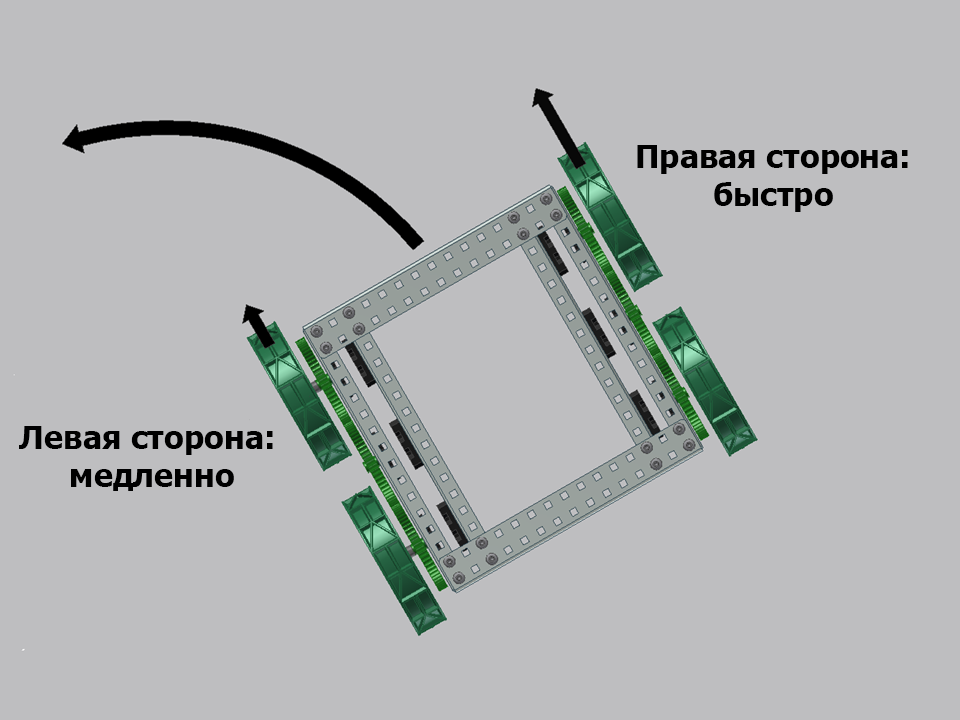
Однобортное управление:
Это наиболее распространенный тип силовой передачи в соревновательной робототехнике. Управление этого типа иногда называется также «танковый ход», так как зачастую применяется при конструировании танков. В ходовой части этого типа, колеса на правой стороне и колеса на левой стороне приводятся в действие отдельными электромоторами. Эти колеса фиксируются в положении «вперед/назад», и их рулевое управление не осуществляется. Управление колесами обеспечивается за счет изменения скорости каждой из сторон привода (например, если правая сторона движется вперед быстро, а левая – медленно – робот выполняет левый поворот).
Ходовая часть этого типа может выполнять поворот нулевого радиуса. Оператор должен просто привести стороны в действие таким образом, чтобы одна из них двигалась вперед, а другая – назад.
Для данного типа привода необходимо два электромотора, но не требуется специальный исполнительный механизм рулевого управления – оба электромотора используются для реализации движения вперед, поэтому ВСЯ мощность используется для ускорения или толкания. Когда ходовая часть поворачивает, на нее действует поворотный скраб (речь о котором будет вестись позже).
Ходовые части с однобортным управлением могут иметь различные конфигурации, но принцип их действия одинаков.

Остальная часть блока будет посвящена ходовым частям с однобортным управлением.
Маневровое управление:
Ходовые части с маневровым управлением являются еще одним распространенным типом в соревновательной робототехнике. В маневровом приводе колеса могут не только перемещаться вперед и назад, но также имеют независимое рулевое управление. Это означает, что робот может выполнять те же повороты, что и робот с однобортным типом управления, но при этом он способен перемещаться в любом направлении за счет рулевого управления колесами.
Привод-тележка:
В приводной системе типа «тележка» используются два комплекта ходовых частей с однобортным управлением, каждая из которых имеет свое направление. Только один из этих приводов находится на земле в заданный момент времени. Например, тележка может иметь основной привод с однобортным управлением, способный перемещаться вперед и назад, с помощью которого тележка может спокойно выполнять повороты. Затем, она может оторвать от земли основную ходовую часть, опустить вторую ходовую часть, способную перемещаться влево и вправо, и с помощью нее перемещаться влево или вправо (как краб).
Всенаправленная ходовая часть:
Ходовая часть, способная перемещаться в любом направлении в заданный момент времени, без необходимости ожидания управления со стороны колес, называется всенаправленной. В конструкции этой ходовой части используются специальные колеса, которые называются роликонесущими колесами. Роликонесущие колеса – это колеса с маленькими, установленными по периметру роликами, способными свободно вращаться перпендикулярно направлению вращения колеса. Это означает, что колеса могут скользить в стороны при чрезмерно малом трении.

Из рисунка выше видно, что зеленые ролики свободно вращаются перпендикулярно направлению движения колес. Колесо может скользить в сторону на этих роликах!
Роликонесущие колеса могут использоваться в различных конфигурациях для создания всенаправленного привода. Вот две наиболее распространенные конфигурации:


Так как роликонесущие колеса не имеют бокового трения, при движении колес направления «вперед/назад» колеса направления «влево/вправо» не подвергаются боковому волочению. Путем подключения обоих комплектов колес к силовой передаче может быть реализовано движение робота в любом направлении.



Единственным недостатком роликонесущих приводов является требование использования нескольких электромоторов, при этом лишь некоторые из них будут задействованы в обеспечении прямолинейного перемещения робота. Простой привод с однобортным управлением может быть собран с использованием двух электромоторов, но конструкция квадратного роликонесущего привода требует использования четырех электромоторов.
Автоматическое управление движением робота днем и ночью:
Автоматическое управление движением робота по маршруту основывается на распознавании изображения с бортовых видеокамер. В дневное время суток колесный робот ориентируется по видимым ориентирам, находящимся в поле зрения двух камер, направленных вперед и назад.
Этот метод дает хорошие результаты на территориях с многочисленными строениями и иными искусственными сооружениями. Однако, он малопригоден на открытых пространствах, где нет объектов с четкой геометрией. В этом случае оптимальна прокладка маршрутов движения робота по пешеходным дорожкам.
При автоматическом движении в ночное время необходимо, чтобы маршрут был освещен уличными фонарями. Для надежной навигации достаточно освещенности, принятой для пешеходных тротуаров в городе – 10 lx. Если на каком-либо участке маршрута движения необходимую освещённость получить не удастся, потребуется установка ночных маркеров. Их можно размещать на столбах или стенах строений.
Препятствия, возникающие на пути движения робота, детектируются встроенной системой стереокамер. Алгоритм обработки стереоизображений позволяет рассчитать расстояние до препятствия и выбрать оптимальный путь объезда. В случае объезда препятствия, приведшего к значительному отклонению от заданного маршрута движения, колесный робот автоматически остановится. Стереокамеры робота задают путь проезда при движении вдоль бордюра или сплошного забора.
Для надежной работы системы обнаружения препятствий в ночное время колесный робот оснащен фарой ближнего света. Фара включается автоматически с наступлением сумерек или при локальной недостаточной освещённости участка предстоящего движения.
Движение и состояние робота для плоскости
Если предположить, что робот ограничивается перемещением на плоскости, его местоположение может быть определено вектором состояния 






Драйвер двигателей

Ардуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки.
Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Интегральное движение на плоскости
Получая перемещения робота в некоторые моменты времени, мы можем найти весь путь, пройденный роботом, просуммировав эти значения, или перейдя к пределу (при стремлении количества измерений 


Рассмотрим робота, который может только двигаться вперед или поворачиваться на месте:
При прямолинейном движении робота на расстояние 

Колёсные и гусеничные роботы
Наиболее простыми и широко распространенными являются роботы на колесных или гусеничных платформах. В действительности, нет более эффективной схемы перемещения по плоским твердым поверхностям, чем колесо.
Колесные мобильные роботы – это дистанционно-управляемые машины, предназначенные для поиска и обезвреживания взрывных устройств (ВУ), размещенных в труднодоступных местах внутри или снаружи зданий и сооружений, под днищем или внутри транспортных средств, внутри урн и контейнеров, в местах оборудованных для массового отдыха людей и т.п.
Характерные особенности роботов данного класса заключаются в малых массогабаритных характеристиках, возможности доставки к месту проведения операции любым видом автотранспорта, возможности погрузки, выгрузки или переноски одним оператором без применения вспомогательных устройств, колесный или комбинированный движитель системы передвижения.
В состав систем передвижения существующих образцов колесных мобильных роботов, как правило, входят:
- – автономные источники энергии (электрические, топливные);
- – электродвигатели (реже двигатели внутреннего сгорания);
- – механические трансмиссии (реже электромеханические);
- – распределительные устройства;
- – движитель со всеми ведущими колесами.
В этих системах крутящий момент от двигателей через редукторы передается одновременно на ряд колес движителя посредством наружных распределительных передач (ременных, цепных, зубчатых, роликовых).
Наиболее распространёнными роботами данного класса являются четырёхколёсные и гусеничные роботы. Создаются также роботы, имеющие другое число колёс – два или одно. Такого рода решения позволяют упростить конструкцию робота, а также придать роботу возможность работать в пространствах, где четырёхколёсная конструкция оказывается неработоспособна.
На практике потребность в шагающих аппаратах возникает в связи с необходимостью использования роботов для передвижения по местности с большим количеством препятствий или неровностей, а также, где от него требуется умение взбираться и спускаться по ступенькам обычной лестницы.
В условиях плохой проходимости гусеничное шасси имеет ряд преимуществ относительно остальных видов шасси. Мобильные гусеничные роботы имеют небольшое удельное давление на грунт, что дает им возможность передвигаться по болотистым местам и по снегу. Мощность двигателя у данного вида шасси более эффективно реализуется в тяговом усилии. Гусеничное шасси обладает большей площадью сцепления с поверхностью, относительно колесного, однако это накладывает некоторое ограничение по скорости пере-движениямобильного робота.
Основные недостатки подобных систем передвижения заключаются в низкой надежности распределительных передач, неудобстве их обслуживания в процессе эксплуатации, а также невозможности быстрой замены в случае выхода из строя.
Конструкция, шасси и двигатели робота на ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.

Если работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Отечественный разработчик автономных роботов-шасси или наш ответ автомобилям google
В начале мая на хабре был отличный топик про то «
как роботы-автомобили Google видят мир
». Видео немного напоминало фильм о Терминаторе, но лично меня оно увлекло. Причем, увлекло настолько, что я полез читать о подобных автомобилях более подробно. К примеру, вы знали, что система Google-автопилота не работает в проливной дождь? Я не знал. Оказывается, под ливнем сенсоры не могут адекватно оценить окружающую обстановку и сравнить с заложенным в памяти эталоном. Впрочем, я собирался писать не об этом.
Итак, беспилотные автомобили. Тема оказалась вполне себе трендовая, поскольку над беспилотными автомобилями работает не только Google. В том или ином виде беспилотниками (точнее автопилотами) занимается большинство крупнейших автоконцернов. Есть своя система у Merсedes, Audi, BMW и т.п. Даже Volvo тестирует систему автопоезда, когда водитель есть только в головной машине, а грузовики, движущиеся за ним, едут на автомате. В общем, на рынке довольно тесно.
Начитав определенное количество материала про зарубежные проекты, меня заинтересовал простой вопрос, а есть ли отечественные проекты, работающие в том же направление? Я, признаться, надеялся найти что-нибудь от автоваза, но беглое гугление вынесло на российскую компанию из Зеленограда. Впрочем, как оказалось, это даже интереснее.
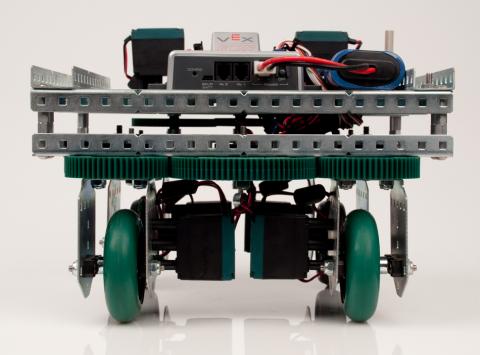
Фирма, именуемая SMP Robotics, занимается разработкой беспилотных шасси, позволяющих ездить по единожды проложенным маршрутам. Иначе говоря, оператор должен один раз провести технику по дороге, а все дальнейшие рейсы шасси осуществляет само. Вот так, к примеру, выглядит робот-охранник, построенный на базе колесного шасси.
Как, в общих чертах, работает Google-автомобиль? Он анализирует информацию, полученную с Google Street View и сравнивает ее с той информацией, что получает от камер (собственно, поэтому ему мешает дождь — он не может получить четкие контуры окружающих предметов). Похожий принцип и тут – в первый раз робот запоминает маршрут (видимо как-то фиксирует ориентиры), после чего он начинает патрулирование по заданной траектории, сравнивая информацию датчиков с эталонной, заложенной в его памяти.

Смесь фильмов «терминатор» и «красная жара»
Если перед роботом возникает препятствие, то стереоинформация с обеих камер позволяет просчитать его глубину и скорректировать маршрут робота. Что интересно, для прокладки первого маршрута используется специальный пульт управления с джойстиками. В дальнейшем о состоянии робота можно узнать с помощью планшета и специального софта под Android. Связь осуществляется по Wi-Fi. И да, самое главное, у шасси присутствует беспроводная зарядка аккумуляторов (насколько я понимаю, процесс зарядки происходит в тот момент, когда робот приезжает на базу).
Помимо колесного шасси, которое, вроде как, является основной разработкой (к сожалению, язык изложения на сайте такой, что смысл написанного иногда улетучивается), SMP Robotics выпускает и бездорожные модификации. На youtube-канале фирмы есть два забавных ролика:
В последнем случае повозка чем-то напоминает драндулеты из дореволюционных фильмов.
Так вот, если я опять же правильно понимаю, на данный момент оба шасси находятся в предсерийном состоянии. Поэтому на самый интересный вопрос, а сколько такая штука стоит, информацию мне найти не удалось. Что же касается использования, то наиболее вероятный вариантом применения сами разработчики видят патрулирование или регулярный перевоз грузов (к примеру, в условиях бездорожья или плохого климата). Собственно, на этом фантазия у разработчиков заканчивается.
Надо сказать, что оба эти варианта, хоть и являются очень логичными и полезными, лично мне не кажутся интересными. Те же функции охранника, к примеру, выполняют роботы в тюрьмах Южной Корее. Да и не только там. Гораздо интереснее было бы придумать что-то вроде системы Rotundus — там тоже используется робот в качестве патрульного, но фишка заключается в том, что две пары камер по краям корпуса позволяют формировать стерео-картинку для оператора-охранника. Учитывая, что в случае с зеленоградцами, их шасси имеет две камеры, используемые для расчета объезда препятствий, их можно было бы так же использовать для 3D. А если помножить это на гусеничный ход, то мог бы получиться отличный 3D-самоходный бинокль. Это, так сказать, то, что пришло в голову сходу. Уверен, что если подумать, такому шасси найдется гораздо более интересное применение (еще больше я уверен, что в варианты применения в комментариях дадут сто очков форы любому разработчику, но я опять отвлекаюсь).
Как я уже писал выше, оба варианта шасси пока являются предсерийными экземплярами. Поэтому шансов пощупать или увидеть их вживую, довольно мало. Сейчас авторы возят по выставкам робота-охранника и прощупывают спрос. Остается надеяться, что наш рынок уже готов заказывать такие игрушки и стартапы вроде SMP Robotics получат шанс на развитие.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино.
Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.

Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Планирование маршрута
Если предположить, что роботу известно местоположение, и как оно относится к мировой системе координат, то планирование маршрута на основе его местоположения позволит ему двигаться по точному пути вдоль последовательности заранее определенных точек. Различные криволинейные траектории могут быть спланированы, с оптимизацией таких критериев, как время движения по маршруту или потребление энергии. Здесь я рассмотрю конкретный, достаточно простой случай, предполагая, что:
На первом шаге планирования маршрута, предположим, что текущее положение робота 

Подключаем bluetooth к машинке
Мы собираемся использовать модуль Bluetooth через SoftwareSerial (библиотеку SoftwareSerial.h), поэтому подключаем модуль блютуз к 3 и 4 цифровым пинам ардуино. RX к D3, TX к D4

Платформа робота готова! Теперь осталось загрузить прошивку для контроллера Ардуино и программу для смартфона RC CAR. Вы можете посмотреть на нашем сайте обзор Android приложений для работы с Arduino.
Подключаем двигатели и плату
С питанием платформы мы разобрались, теперь подключим остальные компоненты. Для начала припаиваем провода к моторам, затем обматываем их изолентой, чтобы случайно в дальнейшем не оторвать контакты. Можно сделать так, что в итоге на 2 двигателя будут идти всего два провода вместо 4х. Это немного упростит монтаж и сэкономит место на платформе.
Монтируем драйвер двигателей на платформу так, чтобы его радиатор был спереди. ЭТО ВАЖНО! В противном случае, вам придется переписывать программу для микроконтроллера.

Затем размещаем холдер и плату БМС. Не забываем оставлять место спереди для последующего монтажа каких-либо сенсоров. Ардуиио нужно разместить так, чтобы была в дальнейшем возможность подключить его к ПК для прошивки. Это же правило относится и к модулю для зарядки аккумуляторов.
Питание для ардуино и других электронных компонентов мы возьмем от драйвера двигателей.
Применение:
– тепловизионное обследование электрических подстанций,
– поиск и обнаружение утечек газа на промышленных и коммунальных объектах,
– охрана и регулярный обход территории,
– перевозка опасных грузов,
– в качестве снегоуборщика и снегоочистителя,
– сборка и сортировка мусора,
– полив зеленых насаждений,
– в сельском хозяйстве с дополнительным оборудованием, например, лазерной установкой для выращивания растений,
– в научных и образовательных целях.
Примечание: описание технологии на примере колесного робота SRX1.
карта сайта
колесные роботыколесный робот ардуиносистемы управления движением колесных роботов2 х колесный робот движение ардуино портфолио мобильный системы управления движением шасси
Коэффициент востребованности 1 324
Пример платформы робота-машины на ардуино
Предлагаем инструкцию по созданию универсальной платформы, которая потом пригодится для создания самых разных проектов, независимо от выбранного контролера или типа шасси. Вы можете использовать стандартные варианты из Алиэкспресса, как на видео, можете снабдить машину гусеницами и создать вездеход, можете придумать вообще ни на что не похожий вариант.

Для реализации проекта нам понадобится:
- Контроллер Ардуино (в нашем случае, Arduino Nano).
- Драйвер двигателя L298N.
- Двигатели с редукторами.
- Корпус и шасси для крепления колес и оборудования
- Корпус для аккумуляторов 18650 с выключателем.
- Коммутационные провода.
Дополнительное оборудование, которое потребуется для создания полноценного проекта:
- Датчик расстояния и серво-мотор, на который он установлен.
- Инфракрасные датчики линии.
- Светодиоды для индикации и “красоты”.
- Пьезодинамик – пищалка.
- Bluetooth модуль (если собираетесь управлять машинкой дистанционно).
- Sensor shield (упрощает коммутацию).
- Модуль контроля заряда и подзарядки аккумуляторов.
- Сами аккумуляторы.

Программирование пути движения колесного робота:
Обучение робота маршруту движения осуществляется при инсталляции роботов на объекте эксплуатации. На основе карт Google Maps или Яндекс Карт формируется электронная карта путей проездов. По маршруту движения расставляются маркеры с шагом в 50 метров.
Воспользовавшись пультом управления или планшетным компьютером, инсталлятор проводит робота по всем возможным путям проездов в режиме ручного управления. Колесный робот запоминает траекторию движения, переносит ее на электронную карту и привязывает к ней визуальные ориентиры, встречающиеся на пути.
Оператор имеет возможность скорректировать маршрут с целью наилучшего выполнения маневров и назначения приоритетных ориентиров. Далее робот запускается на маршрут в автоматическом режиме, с целью накопления информации о видимых ориентирах в условиях различной освещенности.
Наилучший результат достигается при обучающих проездах в течение всего светового дня в условиях переменной облачности. В течении следующих нескольких дней робот ездит по маршруту в режиме тестовой эксплуатации. При этом, маркеры остаются на своих местах, но находятся в выключенном состоянии.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino.

Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Робот с дифференциальным приводом
Такая конфигурация используется в роботах-пылесосах.
Робот с дифференциальным приводом имеет два мотора, по одному на каждое колесо (на рисунке — это большие колеса). Изменение направления движения достигается за счет разных скоростей (отсюда и название — дифференциальный).
Обозначим скорости колес (линейные скорости с которыми они «покрывают» поверхность) 





Степени свободы движения
Число степеней свободы определяет минимальное количество независимых переменных (обобщённых координат), необходимых для полного описания движения механической системы.
Твердое тело, которое перемещается и вращается двигаясь по одномерному пути имеет одну степень свободы — поступательную. В качестве примера можно привезти поезд, движущийся по рельсам.
Твердое тело, которое перемещается и вращается на плоскости имеет 3 степени свободы: 2 поступательных и 1 вращательную. Пример: наземный робот.
Твердое тело, которое перемещается и вращается в 3D-объеме имеет 6 степеней свободы: 3 поступательных и 3 вращательных. Пример: летающий робот.
Особый случай — это так называемый голономный робот, который способен перемещаться мгновенно в любом направлении в пространстве его степеней свободы (робот является голономным если число управляемых степеней свободы равно полному числу степеней свободы).
На видео показан пример четырехколесного робота со всенаправленными колесами.
Схема электропитания робота автомобиля
Вопрос организации правильного стабильного электропитания является одним из самых важных в любом проекте.В нашей модели применена рекомендованная нами схема питания, основанная на использовании литийионных аккумуляторов формата 18650 и платы защиты их от переразряда и перезаряда.
Давайте разберем самый простой вариант схемы питания электромоторов. Перед началом сборки лучше заранее припаять провода к моторам.

Все достаточно стандартно и вы найдете в интернете десятки подобных примеров. Но в этой схеме есть большой минус – в случае полного разряда аккумуляторы придут в негодность.

Для добавления контроллера разряда придется внести следующие изменения в схему:

Теперь аккумуляторы будут защищены, но здесь нет возможности заряжать их.

Для зарядки можно использовать модуль повышения напряжения с 5v до необходимого уровня зарядки, который зависит от количества серий используемых аккумуляторов. Он имеет гнездо типа микро USB и при частом использовании оно может сломаться, поэтому мы рекомендуем установить дополнительное гнездо для последующей подзарядки пяти вольтовым блоком питания. Для зарядки двух литий-ионных аккумуляторов необходимо настроить выходное напряжение на 8,4 Вольта.


