
 у квадрокоптера, как исправить - Все о квадрокоптерах | PROFPV.RU")
- Калибровка квадртокоптера. основные моменты
- Почему квадрокоптер тянет в сторону?
- Что такое состояние вихревого кольца?
- Как понять, что нужна калибровка?
- Почему квадрокоптеры нужно калибровать?
- Du-bro пена
- Виды калибровки
- Вкладка blackbox
- Вкладка cli
- Вкладка configuration
- Вкладка failsafe
- Вкладка modes
- Вкладка pid tuning
- Гелевые подушечки
- Измерте свои уровни вибрации:
- Изолируйте apm от рамы:
- Как вывести дрон из состояния вихревого потока
- Как калибровать квадрокоптер syma
- Как настроить pid по шагам
- Как подготовить квадрик к полёту
- Как распознать состояние вихревого кольца?
- Как решить проблемы с пультом управления/джойстиком
- Какие кнопки есть на пульте управления syma x5c
- Лучшее лечение – это профилактика
- Настройка loiter
- Настройка roll/pitch
- Настройка yaw (рысканье)
- Настройка в полете
- Настройка высоты
- Настройка передатчика
- Обзор
- Обзор режима
- Подготовка коптера к первому взлету
- Примечания и советы
- Проверьте двигатели на раме, пропеллеры и их соеденители:
- Прошивка и настройка minimosd
- Прошивка и настройка регуляторов
- Прошивка полётного контроллера
- Теория о pid, параметры и как это работает
- Триммирование квадрокоптера
Калибровка квадртокоптера. основные моменты
Существует два варианта действий:
- механическая (применяется при небольшом отклонении в полете, представляя собой обычное подкручивание регулятора, отвечающего за тягу в одну или другую сторону, который расположен между сервоприводом и тарелкой);
- автоматическая (предполагает настройку работы напрямую с пульта управления и проводится при необходимости сместить триммер на 5 позиций).
Сама калибровка проводится следующим образом:
Если появились проблемы, то сбрасываем до нуля настройки. Для этого поставьте дрон на ровную горизонтальную площадку, включите его и потяните одновременно левый джойстик вниз, а правый налево. Сделайте паузу, необходимую для настройки гироскопа, а затем одновременно левый стик отведите вниз, а правый направо. дождавшись калибровки акселерометра.
Теперь попробуйте вновь запустить дрон и поднять его на высоту не меньше полуметра (ниже нет смысла, так как коптер будет удерживаться воздушной подушкой, образующейся при вращении винтов). Если проблема не исчезла, то требуется триммирование.
Почему квадрокоптер тянет в сторону?
Самой распространенной проблемой с дронами остается их нестабильное положение и «увод» в сторону в условиях безветренной погоды. В большинстве случаев проблема решает калибровка и триммирование. Если это не помогает, то проблема может быть более серьезной и нужно проверить следующие моменты:
- правильность подключения;
- корректность направления вращения пропеллеров;
- наличие неисправностей в приводах пропеллеров;
- целостность отдельных элементов, ведущих к разбалансировке коптера.
Достаточно часто причиной проблем становится попытка самостоятельного или неквалифицированного ремонта, что нужно учитывать при техническом обслуживании. Если вы решите калибровать или ремонтировать дрон самостоятельно, то действуйте внимательно и соблюдайте требования инструкций.
Что такое состояние вихревого кольца?
Состояние вихревого кольца (встречаются также названия “режим вихревого кольца”, “тороидальный вихрь” и английский вариант “vortex ring state”) может возникнуть во время вертикального снижения с нулевой либо невысокой горизонтальной скоростью. При таком снижении винты мультикоптера теряют подъёмную силу, поскольку проходят прямо через создаваемый ими же турбулентный поток. В результате дрон срывается практически в отвесное падение.
Как понять, что нужна калибровка?
Для начала нужно поднять дрон на высоту и попробовать полетать. При получении с пульта команды «вперёд», дрон должен лететь вперёд, а не вперёд и чуть влево, вверх, вниз, или ещё куда-то. Так нужно проделать со всеми направлениями, лучше даже в разных режимах полёта. Если по какой-то из осей наблюдаются отклонения- нужно калибровать.
Почему квадрокоптеры нужно калибровать?
Квадрик в полёте может вести себя неадекватно. Например, устройство может кренится в одну из сторон или вращаться вокруг своей оси. Здесь на помощь и приходит триммирование квадрокоптера. Она позволяет скорректировать поведение коптера через настройку контроллера.
Du-bro пена
- 1/4″ Du-Bro пены можно приобрести непосредственно у розничных торговцев радиоуправляемых моделей
- Использование Krazy Glue (или эквивалент), чтобы прикрепить пену на один из уровней рамки.
- Затем клей на нижнюю часть корпуса (APM/PX4, содержащий APM/PX4 конечно) непосредственно к пене.
- Клееный по методу Foam означает, что будет трудно удалить полетный контроллер.
- Вы можете приобрести дополнительный чехол или детали рамы ,
чтобы позволить вам установить полетный контроллер между рамами или использовать один из других методов. - APM 2.5 и 2.6 можно отвинтить от верхней крышки и проклеить заднюю крышку.

Виды калибровки
- Механическая калибровка квадрокоптера
Механическая калибровка, это подкручивание регулятора тяги. Подкручиваешь регулятор, поднимаешь дрон, если проблема осталась – повторяешь. Используется тогда, когда отклонение от нужной оси не очень велико. - Автоматическая калибровка квадрокоптера
Автоматическая калибровка, это настройка работы дрона с пульта управления. Применяется, когда нужно сместить триммер на 5 и более позиций. Она происходит по-разному, в зависимости от пульта и контроллера. Придётся обратиться к инструкции. - С помощью ПО mission planer
Это программа для калибровки плат Ardupilot. Она позволяет программно задать нужные параметры. Как правило, калибровка через неё происходит перед первым запуском самодельного коптера.
Калибровка происходит следующим образом:
- Включаем передатчик радиоуправления (на момент калибровки регуляторов радиоуправление должно быть уже откалибровано). Выставляем ручку газа на максимум
- Берем Li-Po аккумулятор и подключаем к разъему Power-модуля для включения автопилота. Питание регуляторов соответственно тоже будет обеспечивать этот аккумулятор
- После включения APM будет мигать своими синими и красными светодиодами. Этим он сигнализирует готовность к калибровке при следующем включении. Отключаем аккумулятор от Power-модуля
- Включаем питание заново. Регуляторы издают стандартный звуковой сигнал (обычно количество сигналов равно количеству банок в батарее) и через некоторое время дважды издает короткий сигнал, что подтверждает калибровку по максимальному газу
- Опускаем ручку газа в минимальное положение. Регуляторы издают один долгий сигнал, что подтверждает калибровку по минимальному газу
- С этого момента калибровка регуляторов для APM 2.8 завершена и можно проверить работоспособность моторов
- Убираем газ на минимум и выключаем питание Ardupilot.
Вкладка blackbox
Blackbox — это «чёрный ящик» квадрокоптера. Нужен для диагностики, более точной настройки PID, а также чтобы можно было наложить инфографику на полётное видео (как
). Данные пишутся на внешний логгер или, если того позволяет объём памяти, на внутреннюю память ПК. Например, у Naze32 Acro её недостаточно, а у Naze32 Deluxe и SPRacingF3 Acro — хватает, хотя и не намного. При настройках по умолчанию, на 2Мб памяти можно записать данные полёта продолжительностью 3-4 минуты, что весьма мало.
Усугубляет ситуацию то, что реализовать запись «по кругу», как в автомобильных регистраторах, здесь невозможно из-за низкой скорости чтения/записи памяти. Единственный вариант — уменьшить в несколько раз скорость записи. Для диагностики такие данные уже будут малопригодны, а для видео — самое то. В этой вкладке я сделал следующее:
Как я уже писал выше, логгирование запускается тем же тумблером на аппаратуре, что и арминг, чтобы запись начиналась при старте моторов. Подробнее о работе и настройках Blackbox можно почитать в мануале. Также несколько полезных ссылок по теме:
Вкладка cli
CLI — это консоль, через которую можно менять уже более продвинутые настройки, а также делать резервную копию всех настроек. Я сделал следующее:
set small_angle = 180 # Включить возможность армить моторы даже в перевёрнутом состоянииset vbat_pid_compensation = ON # Включить компенсацию PID при разрядке батареиsave # Сохранить настройки
Также в Betaflight есть очень полезная возможность подключения к OSD через ПК. Теперь можно запрятать эту платку подальше, не беспокоясь, что к ней может понадобиться подключиться. Для подключения к плате OSD через ПК необходимо подключить батарею к квадрокоптеру, затем набрать в CLI команду serialpassthrough с необходимыми параметрами, затем отключить (Disconnect)
serialpassthrough 1 115200
На этом настройка полётного контроллера закончена.
Вкладка configuration
Собственно тут и производятся почти все настройки.
- В разделе «Board and Sensor Alignment» указал, что мой ПК повёрнут на 90 градусов по оси yaw. Корректность этого параметра потом можно проверить во вкладке Setup.
- В «Reciever Mode» выбрал RX_PPM.
- Выбрал ONESHOT125 в качестве протокола регуляторов (почему не MULTISHOT, я писал выше).
- Отключил «Unsynced PWM output», опять же, потому что не использую MULTISHOT.
- Чтобы моторы всегда вращались в заармленном состоянии, отключил MOTOR_STOP.
- Включил опцию «Disarm motors regardless of throttle value», так как буду делать арм моторов на отдельном канале.
- Уменьшил значение «Minimum Throttle» до 1030. Это обороты холостого хода, подбирал субъективно.
- Включил опцию «VBAT» для активации индикатора заряда батареи. Остальные параметры в разделе «Battery Voltage» я не менял, так как показания заряда соответствуют действительности. Если же в них есть погрешность, её можно убрать настройкой «Voltage Scale».
- В «Other Features» активизировал BLACKBOX, SUPEREXPO_RATES, а также LED_STRIP и выключил AIRMODE. О неё я расскажу чуть ниже.
Вкладка failsafe
C failsafe всё оказалось несколько сложнее, чем мне виделось ранее. На профильных форумах иногда встречаются холивары на тему «где лучше настраивать failsafe: на приёмнике или на ПК?» На самом деле, правильно это вопрос звучит так: «где лучше настраивать failsafe: только на приёмнике или на приёмнике и на ПК?»
Настраивать failsafe на приёмнике необходимо в любом случае. Здесь надо сделать важное уточнение, что речь идёт о приёмнике Frsky D4R-II, работающем по протоколу PPM. У приёмников с S.Bus failsafe настраивается иначе.
У Frsky D4R-II есть три варианта поведения при потере сигнала от передатчика:
По умолчанию в Frsky D4R-II установлен режим Hold Last Position, который способствует улёту аппарата в далёкие дали. Так что если использовать failsafe только на приёмнике, надо настраивать режим Pre-set Positions. Другое дело, что failsafe активируется даже при кратковременной потере сигнала.
Будет очень неприятно, если сигнал через долю секунды восстановиться, а квадрокоптер уже задизармил моторы и падает вниз. Ситуацию может улучшить настройка failsafe на ПК, так как там этот режим имеет задержку срабатывания, что служит фильтром от кратковременных потерь сигнала.
Кроме того, там есть настраиваемый сценарий, согласно которому квадрокоптер будет себя вести в случае активации failsafe. Например, можно включить режим со стабилизацией и попытаться более-менее мягко сесть или вообще активизировать RTH, если он есть.
Нюанс в том, что, если на приёмнике установлен режим Pre-set Positions или Hold Last Position, то ПК даже не узнает, что произошла потеря сигнала. Таким образом, failsafe на ПК можно использовать лишь в том случае, если на приёмнике установлен режим No Pulse. На Frsky D4R-II он устанавливается кратковременным (менее 1 сек) нажатием на кнопку failsafe
при выключенном передатчике
На вкладке Failsafe Betaflight Configurator`а я сделал следующее:
Вкладка modes
Повесил на переключатели арминг моторов и Blackbox (AUX1), активацию полётного режима Horizon (AUX2) и включение пищалки (AUX3).
Отдельно хочется сказать про AIRMODE. Изначально он был уникальной «фишкой» Betaflight, но в какой-то момент стал так популярен, что Boris B поделился им с авторами Cleanflight и сейчас данный режим доступен и там тоже.
Несмотря на то, что AIRMODE отображается как отдельный режим полёта — это скорее дополнительная опция, а не полноценный режим. Он позволяет квадрокоптеру удерживать заданный угол даже при минимальном газе. Именно поэтому не рекомендуется использовать AIRMODE вместе с режимами со стабилизацией.
Кроме того, приземление с AIRMODE тоже процесс непростой: квадрокоптер начинает прыгать, как лягушка. Опытные пилоты предпочитают просто «ронять» квадрокоптер, выключая моторы в паре десятков сантиметров над землёй. Кстати, если у вас включена остановка моторов при нулевом газе (опция MOTOR_STOP во вкладке Configuration) и одновременно с этим работает AIRMODE, то остановки моторов не будет, так как AIRMODE имеет более высокий приоритет.
В Betaflight версии 2.8.1 появилась новая возможность: можно включить AIRMODE в фоновом режиме (что-то вроде пассивного перка в играх) и тогда он активен всегда и не будет отображаться во вкладке Modes, либо, как и ранее, повесить его включение на какой-либо канал. Делается это в «Other Features» вкладки Configuration.
У себя я не стал включать AIRMODE в фоновом режиме, так как использую ещё режим со стабилизацией HORIZON. Таким образом, у меня на AUX1 два полётных режима: HORIZON (для полётов со стабилизацией и посадки) и ACRO AIRMODE.
Вкладка pid tuning
Настройка PID — процесс, в который совершенно не стоит лезть «не зная брода». В первую очередь, необходимо теоретическое понимание этих трёх составляющих. Вот несколько статей, которые могут с этим помочь:
Я себя не чувствую готовым к подобной настройке, поэтому я оставил значения по умолчанию, благо Betaflight позволяет неплохо летать и с ними. Но два изменения я всё же сделал:
Гелевые подушечки
1Положите виброгасящие гелевые подушечки (1 см ~ 2 см) на каждом угле полетного контроллера.
Возможные гели включают в себя:
- Kyosho Zeal Gel Tape вероятно, самым лучшим решением,
теперь в наличии на Amazon, E-Bay. - USA Силиконовый гель лента и колодки (V10Z62MGT5 лента рекомендуется)
- United Kingdom Silicone Gel Tape, Pads и втулки
- Moon Gel Pads (также доступны в музыкальных магазинах).
Внимание: Moon Gel показал провал в тепле выше 100 градусов по Фаренгейту,
так что его следует использовать с осторожностью.
2. Закрепите на плату (~ 1 см) в ширину липучку подпорный ремешок или резинку.
Будьте осторожны, что ремень не удержит так надежно,
это мешает затуханиям колодки. Рассмотрите вопрос о создании слоя
мягкой пены между ремнем и полетным контроллером.
Рама F330 с Kyosho Zeal Pads
Измерте свои уровни вибрации:
- Вибрация должна быть менее 0,3 G в X и Y осей и менее 0,5 G в оси Z.
- Вы должны стремиться, чтобы получить /- 1/10 G по всем осям,
и постараться добиться этого. - Пожалуйста, обратитесь к вики странице измерения вибраций ,
что бы понять, что они находятся в допустимых значениях
Изолируйте apm от рамы:
- Двусторонняя лента или липучки традиционно используется для крепления APM/PX4 к раме.
- Во многих случаях лента или пена Velcro не обеспечивает адекватной виброизоляции,
потому что масса контроллера полета на борту настолько мала. - Есть четыре возможных альтернатив, которые были протестированы и показали лучшие результаты:
Как вывести дрон из состояния вихревого потока
Чтобы спасти квадрокоптер от неминуемого падения, вам нужно вернуть его пропеллеры назад в чистый (т.е. нетурбулентный) воздух. Для этого вам нужно выйти из вертикального снижения, переместив дрон вперёд либо в любую другую сторону.
Представьте, что прямо под вашим квадрокоптером расположен столб турбулентного воздуха, и ваша задача – вырваться из него в любом направлении. Кроме этого вам следует максимально уменьшить газ, чтобы снизить поток турбулентного воздуха под дроном. Как вы помните, чем быстрее крутятся винты дрона, тем более сильные завихрения возникают под ними – а этого нам нужно избежать.
В некоторых ситуациях поток воздуха, через который снижается ваш дрон, может быть настолько завихрённым, что вы полностью потеряете управление (мультикоптер не будет реагировать на попытки изменить крен, рыскание и тангаж). В этом случае что-либо предпринимать уже поздно: ваш квадрокоптер, вероятнее всего, станет очередной жертвой состояния вихревого кольца и разобьётся. Именно поэтому так важно вовремя распознать опасную ситуацию!
Итак, как только вы обнаружили, что ваш квадрокоптер попал в состояние вихревого кольца, немедленно сделайте следующее:
- Направьте дрон вперёд (или в любую другую сторону), чтобы покинуть турбулентную зону.
- Если это не помогло, снизьте газ, чтобы уменьшить завихрения, и повторите пункт 1.
Помните: никогда не увеличивайте газ, находясь в состоянии вихревого кольца.
Как калибровать квадрокоптер syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора.
При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.

Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
- при вращении влево триммер под левым джойстиком управления нужно медленно сдвигать вправо до момента прекращения подобного движения и на оборот;
- при движении аппарата вперед или назад нужно передвигать триммер под правым джойстиком также в противоположном направлении.
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Как настроить pid по шагам
- Убедитесь, что двигатели сбалансированы и у квадрокоптера нет вибрации настолько, насколько есть возможность ее снизить. Попытка настроить PID без «чистого» гироскопа (балансировка и снижение вибрации делается для того, чтобы гироскоп работал без помех) — это все равно, что строить дом без хорошего фундамента. Это видео расскажет вам о простом способе проверки вибрации. Отрегулируйте настройки низкочастотного фильтра (lowpass filter) по мере необходимости, чтобы достигнуть «чистого» сигнала гироскопа.
- Важно, чтобы этот шаг выполнялся в режиме Акро, даже если вы всегда летаете в режиме стабилизации/горизонта. Режимы AngleHorizont имеют свои значения и мешают настройке PID. Пример параметров PID ниже соответствует Rewrite PID (PID controller #1). При выполнении этой первоначальной настройки установите значение TPA равным 0. При необходимости TPA может быть добавлен позже.
- Начинать настройки нужного с маленьких изменений настроек по умолчанию. и начинать нужно с коэффициента Р. Значение Р на Pitch и Roll равное 4.0 будет хорошей отправной точкой.Также, следует снизить I и D у Pitch и Roll для настройки Р с минимальными помехами. Поэтому рекомендуется установить для I — 20, а для D — 5. Для Yaw целесообразно взять значение по умолчанию и разделить на 2. и немного уменьшить значение I, чтобы исключить эту ось в качестве источника колебаний. Yaw настраивается последним.
- Во время тестовых полетов, увеличивайте параметр Р по оси Roll до тех пор пока не увидите колебания при приближении к полному газу, а также не услышите видимые и слышимые колебания. Затем установите значение параметра Р равным примерно 70% от значения вызвавшего колебания. Теперь думаю понятно, почему без опыта полетов на конкретном квадрокоптере у вас не получится настроить его PID’ы?
- Повторите шаг 4 для оси Pitch.
- Проверьте, держит ли квадрокоптер нужный угол наклона Roll и не дрейфует ли он при крене (roll), а затем несколько раз дайте резкий газ вверх и резко отпустите его в 0. Вот тут обратите внимание — угол крена который вы сделали до игры газом не должен существенно меняться. Если угол отклонения кажется вам сильно отклонившимся (дрон начал дрейфовать), увеличьте параметр I. Если все ок и дрейфа нет, не меняйте I. Вы можете поменять «ощущение» своего дрона, подняв или опустив параметр I после достижения хороших настроек PID, так как I не влияет на конечные значения P и D.
- Повторите шаг 6 для оси Pitch.
- Параметр D следует увеличивать на каждой оси ТОЛЬКО до такой степени, чтобы он помогал уменьшить отдачу после флипов и роллов (флип — переворот вбок, ролл — переворот «вверх ногами»), а также после колебаний после свободного падения, когда вы делаете газ в 0 и дрон падает, затем запускаете двигатели газом и они начинают как бы проваливаться в воздухе и в этот момент дрон начинает мотать из стороны в сторону. Когда такие проблемы пропадут благодаря увеличению параметра D, снизьте этот параметр до уровня 80-90% от этого уровня.
Примечание: слишком высокое значение параметра D может привести к нагреву двигателей. Чтобы проверить нагрев, нужно полетать 20-30 секунд, приземлиться и проверить руками двигатели. Если сможете держать пальцы на моторах, то они не будут сильно нагреваться.
- Часто настройка Yaw не нужна, либо она будет минимальной, так как все равно может вызывать колебания, если ничего не делать.
Начните с Yaw P и проверьте дрон на вибрации как в первом шаге, а также убедитесь, что нет вибраций, если вы дадите резкий и длинный газ или быстрый пролет вперед
Начните увеличивать Yaw Р с шагом 5 до тех пор, пока не увидите вибрации в видео с камеры при полете вперед или полном газе. После этого немного уменьшите значение.
Теперь нужно посмотреть данные в blackbox. Возможно, Yaw P будет немного колебаться, поэтому попробуйте увеличить Yaw gyro, чтобы посмотреть, действительно ли колебания доходят до гироскопа. Если Yaw gyro выглядит более менее ровным, то все в порядке.Примечание: поскольку yaw по своей природе имеет меньший контроль, нежели pitch и roll, то для этой оси допустимы широкие диапазоны значений. P и I могут быть высокие, а D — низким, это нормально.
- Теперь нужно настроить соотношение между P и I, то есть, будет ли квадрокоптер при резких поворотах сопротивляться или наоборот проваливаться в эти повороты. Очень низкие значения I приводят к смещению оси через некоторое время. Низкие значения I по оси также позволяют свободно менять положение, но при этом сохранять это положение. Более высокие значения по оси I будут хорошо держать позицию дрона, но могут иметь тенденцию сопротивляться движению добавляется небольшое движение по инерции. Очень высокие значения приводят к «роботизированным» движениям дрона и создают колебания.
- После завершения настройки в режиме Акро, можно переходить к настройкам других режимов, например, Horizon (горизонт).
Помните, что не нужно слишком глубоко зарываться в изучение логов Blackbox для настройки идеальных PID. Если квадрокоптер летает хорошо и вас все устраивает, просто идите и летайте 
Как подготовить квадрик к полёту
До взлёта нужно настроить гироскоп и GPS. Обычно это делается очень просто, но у каждого коптера эта функция вызывается по-своему. Этот процесс всегда подробно описан в инструкции.
Если это первый полёт, то для коптера RTF (ready to fly) нужно настроить только гироскоп и GPS. Для самодельного БПЛА процесс подготовки к первому полёту будет сложнее.
Нужно:
- Привязать пульт управления квадрокоптером
- Настроить параметры тяги через соответствующий софт (например, mission planer, о котором мы говорили ранее)
- Настроить вспомогательные системы (GPS, гироскоп)
- Запустить на высоту 0.5 метра, и при необходимости, подкрутить регуляторы оборотов.
Как распознать состояние вихревого кольца?
Своевременное распознавание проблемы является ключом к предотвращению крушения. Первыми предупреждающими знаками являются заметные вибрации/колебания вашего квадрокоптера и возросшая скорость снижения. Худшее, что можно сделать в этой ситуации – попытаться увеличить мощность, наклонив стик газа вверх.
Как решить проблемы с пультом управления/джойстиком
Неожиданно, но надо триммировать. С этим мы уже разобрались раньше. Проблема может быть, как с левым, так и с правым джойстиком. Чтобы это узнать, нужно поднять коптер в воздух, и наблюдать.
- Если аппарат кренится вправо, то триммировать надо правый рычаг пульта по крену
- Если есть наклон вперёд или назад, то нужно править левый стик, используя триммер тангажа
- Если коптер летит по диагонали, то нужно работать с обоими стиками
Какие кнопки есть на пульте управления syma x5c
- Левый и правый стики (джойстики);
- Переключение режимов (слева от левого стика);
- Поворот на 360 градусов (справа наверху);
- Переключатель «вперед-назад» (слева от правого стика);
- Переключатель режимов (под правым стиком);
- Кнопка «вкл-выкл» (в центре, над дисплеем).
Лучшее лечение – это профилактика
Чтобы предотвратить попадание дрона в состояние вихревого кольца, никогда не снижайтесь вертикально вниз. Если вам всё-таки нужно это сделать, делайте это медленно. Если вам нужно снизиться быстро, делайте это зигзагами или по спирали. Эта техника очень эффективна, потому что на винты будет попадать поток “чистого воздуха”.
Надеемся, после прочтения этой статьи вы сможете вовремя определить и вывести ваш мультикоптер из состояния вихревого кольца, а самое главное, научитесь избегать попадания в подобную ситуацию и тем самым сохраните ваш дрон целым!
Настройка loiter
Если крен и тангаж (наклоны по сторонам квадрокоптера) настроены правильно, GPS и Компас настроенны
правильно и уровень вибрации приемлемый, то настройка Loiter не требуется, но пожалйста посетите страницу полетного режима Loiter для
дополнительной информации по настройкам включая горизонтальную скорость.
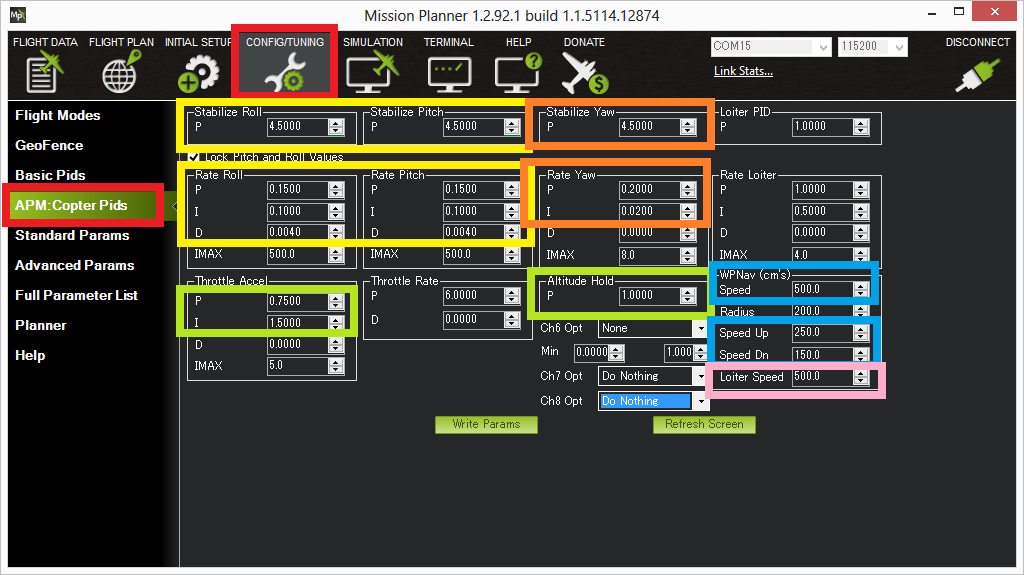
Настройка roll/pitch
Параметры Stabilize Roll/Pitch и Rate Roll/Pitch выделеные желтым цветом на снимке управляют отзывчивостью крена и тангажа.
Параметр Rate преобразует желаемую скорость вращения в соответствии с мощностью двигателя является наиболее важным. Наибольшая
информация о настройке их находиться здесь здесь
Параметр Stabilize Roll/Pitch P преобразует нужный угол в требуемую скорость вращения, которая меняется контролем скорости.
- Чем выше это значение, тем сильнее квадрокоптер реагирует на наклоны по крену и тангажу, более низкое – сделает реагирование более гладким
- Если установлено слишком большое значение – квадрокоптер будет колебаться по осям крена и тангажа (roll / pitch)
- Если установлено слишком малое значение – квадрокотпер будет вялым на входящие команды
Более подробная информация по настройке крена и такгажа можно найти в разделе Stabilize Roll/Pitch настройки
Объективный взгляд на общий Roll и Pitch производительность можно увидеть посмотрев график из логов полетного контроллера в ATT сообщениях.
сопоставив значения на графике Roll-In vs Roll и Pitch-In vs Pitch . Оба графика должны следовать друг за другом в режиме Stabilize и в режиме AltHold.
Как альтернативу вы можете попробовать использовать автонастройку Stabilize и Rate c с помощью AutoTune
Настройка yaw (рысканье)
Параметры Stabilize Yaw и Rate Yaw выделены на скриншоте выше оранжевым цветом и отвечают за отклик рысканья (поворот носом).
Редко, когда эти параметры требуют настройки.
Подобно крену и тангажу, если параметры Stabilize Yaw P или Rate Yaw P слишком высокие – нос квадрокоптера будет колебаться, а если он
слишком низкий – квадрокоптер будет не в состоянии поддерживать направление носа.
Как уже упоминалось в разделе режима Stabilize , параметр ACTO_YAW_P отвечает
как быстро вертолет будет вращаться на основе команд рысканья пилотом. По умолчани это 4.5 – то есть скорость вращения
200 градусов в секунду, когда стик рысканья полностью утоплен влево или вправо. Большее значение сделают вращения быстрее.
Настройка в полете
Одиночный параметр может быть настроен в полете с помощью 6-го канала на аппаратуре. Для примера можно настроить
Rate Roll/Pitch P значния , найденые на странице Настройка Rate Roll/Pitch P раздела “настройка в полете”.
Пожалуйста посмотрите в ПО Mission Planner в разделе Config/Tuning -> APM Copter PIDS полный список параметров назначаемых на 6-й канал
которые могут быть настроены.
После установки значения на 6-й канал , его показания минимума и максимума должны быть в разумных пределах ( то есть не нулевой , а так же неоправданно большой),
а затем нажмите кнопку “Refresh screen” убедитесь, что путем настройки регулятора 6-го канала параметр правильно обновляется.
Настройка высоты
Параметры связанные с удержанием высоты выделены зеленым цветом на скриншоте выше.
Параметр Altitude Hold P используется для конвертирования ошибок высоты (разница между заданной и фактической высотой)
до набора или снижения желаемой высоты. Чем выше этот коэффициет тем более агресивно пытается поддерживаться эта высота,
если слишком большой коэффициет – это приводит к рывкам дросельной заслонки.
Параметр Throttle Rate (который обычно не требует настройки) преобразует коэффициент подъема или спуска до нужного ускорения вверх или вниз.
Параметры Throttle Accel PID добавляют преобразованые ошибки ускорения (то есть разница между желаемым и фактическим ускорением) на выходе у моторов.
Придерживайтесь соотношению 1 к 2 (P к I) (т.е. I в два раза выше P) , если вы меняете эти параметры.
Смотрите страницу режима удержания высоты (AltHold) для получения дополнительной информации.
Настройка передатчика
Передатчик (он же “пульт») каждый пилот настраивает индивидуально: таймеры, миксы, голосовые уведомления и прочее. Единственная вещь, сделать которую крайне желательно, это проверить минимальные, средние и максимальные значения стиков управления в конфигураторе.
Делается это во вкладке Reciever. Идеальные значения составляют 1000 — 1500 — 2000. В моём случае они составляли 996 — 1508 — 2020, что не очень хорошо. Во-первых, «выпадения» за пределы диапазона (значения менее 1000 и более 2000) плохи сами по себе.
Во-вторых, центральное положение, отличное от 1500, будет восприниматься ПК, как лёгкое подруливание, которое он будет отрабатывать и квадрокоптер постоянно будет сносить в какую-то сторону. Словом, имеет смысл повозиться и настроить «как надо».Как настроить эти значения на передатчике Taranis, показано здесь.
У меня Turnigy 9XR PRO, там это делается в пункте Limits. Также можно выполнить настройку через программу eePskye (вкладка Limits), но это неудобно, так как результат сразу не видно в Betaflight Configurator. Сделать это необходимо для каждого из четырёх каналов управления.
После настройки центральные значения максимально приблизились к 1500, но у меня они начали «прыгать» примерно на 5 единиц в одну или другую сторону. Не знаю, с чем это связано, вероятно, значения пульта являются пограничными для ПК и после их округления получается такой эффект.
set deadband = 6
Значение может быть от 0 до 32 и с его повышением чувствительность управления снижается. Управление становится более мягким. Надо понимать, что после определённого порога мягкость превратится в ватность, поэтому для себя я выбирал минимальное значение, при котором дёрганья исчезли.На этом всё, удачных полётов!
Обзор
По умолчанию PID усиления предназначены для квадрокоптеров 3DR , хотя они работают на самых разных рамах.
Тем не менее, что бы получить оптимальную производительность может потребоваться их настройка , которая
может быть сделана через Mission Planner ->
Наиболее важным параметрами являются правые – Rate Roll P (и по умолчанию Rate Pitch P заблокирован с тем же значением).
как обсуждалось здесь
Обычно лучше всего начинать с настройки коэффициента Roll/Pitch P в режиме стабилизиции, затем перейти на настройки
удержания высоты в режиме AltHold , затем Loiter (который часто не нуждается в настройке) и последнее –
настройки производительности полета по навигационным точкам в режиме Auto.
Примечание:Руководство полезной информации с прошивкой ArduCopter версии 2.8.1
настройки этих параметров после версии 2.8.1 очень сильно изменились.
Обзор режима
- Углы наклона контролируются пилотом стиком наклона на аппаратуре. Когда стик наклона крена и тангажа (Roll and Pitch) отпускается происходит автоматическая стабилизация по уровню горизонта
- Пилоту требуется регулярно регуляровать наклонами квадрокоптера, что бы удерживать его на месте под воздействием ветра.
- Пилот управляет рысканьем (Yaw, Rudder) (повоторы по часовой стрелке и против) для изменение положения головы. Когда стик отпускается направление по ходу движения будет поддерживаться на измененом уровне.
- Дроссельной заслонкой (Стик газа, Throttle) пилот регулирует обороты двигателя, требуется постоянная корректировака стиком газа, что бы поддерживать высоту. Если стик газа убрать в минимум , то сработает параметр (MOT_SPIN_ARMED – параметр, определяющий скорость моторов при снятии с охраны – “arming” ) и если апарат находился в полете то он потеряет управление ориентацией и упадет.
- Регулировка газом происходит автоматически на основе угла наклона (т.е. увеличивается как только происходит наклон), что бы уменьшить компенсацию пилот должен следить за высотой квадрокоптера.
- В прошивказ 3.0.1 и более ранних версиях квадрокоптер можно было снять с охраны только в режимах стабилизации и ACRO.
Внимание: Настоятельно рекомендуется освоить полет в режиме стабилизации, чем переходить сразу к другим режимам. Пилот
всегда сможет легко и быстро переключиться в режим стабилизации из других режимов полета в случае неожиданного или нежелательного поведения в полете.
Подготовка коптера к первому взлету
Перед первым запуском проверьте включен ли дрон, проконтролировав положение соответствующего переключателя на его корпусе. Затем установите его на горизонтальную поверхности и разово на короткий промежуток времени поднимите левый джойстик вверх (если требование горизонтальности не будет соблюдено, то могут быть сбиты все настройки). Если все в порядке и можно взлетать, то вы услышите короткий однотонный звук.
В случае, когда после активации на пульте управления начал быстро мигать светодиодный индикатора, а на квадрокоптере он мигает очень медленно, то это признак рассинхронизации.
Восстановить нормальную связь поможет выключение и повторное включение дрона.
Примечания и советы
В логах черного ящика высокие колебания P не выглядят как острые пики или большие волны. Эти колебания сначала проявляются в самом верху диапазона газа и выглядят как узкие синусоидные волны. Когда они появляются в логах, их еще не видно визуально или на слух, поэтому при начальной настройке (визуально и на слух) рекомендуется сначала достичь точки визуальных и звуковых колебаний, а затем снизить значения до 70%. К моменту, когда все колебания будут видны визуально или на слух, то в логах это тоже будет отчетливо отображаться.
Проверьте двигатели на раме, пропеллеры и их соеденители:
У квадрокоптеров в основном вибрация идет от моторов и пропеллеров, которую можно значительно уменьшить:
- Рама , особенно её лучи являются основной причиной асинхронной вибрации, поэтому лучи должны быть как можно жесткими
- Рамы квадрокоптеров DJI и их хороших клонов имеют достаточно жесткие лучи.
- Лучи из Carbon fiber (углеродного волокна) имеют достаточно хорошие характеристики.
- Более тяжелые алюминиевые квадрокоптеры, как Arducopter, являются гибкими, более дешевые китайские – часто нет.
- Большинство коммерческих квадрокоптеров имеют литьевой экзоскелет или лучи, такие как IRIS или Phantom являются достаточно жесткими.
- Дешевые, легкие рамы, как правило, чтобы продемонстрировать более высокое качество сильно и тяжело загружают квадракоптер (“Flexi” он получает).
- Мотор на раме и луч рамы должны быть безопасными и гибкими (иногда это проблема для карбоновых лучей).
- Двигатели должны работать бесперебойно (подшипники должны быть не изношенных и у них не должен быть “визг”).
- Пропеллерные переходники, соединяющие винты для двигателей должны быть концентрическими и очень прямыми.
- Винты должны быть полностью сбалансированы с помощью хорошей балансировки
- Балансированный двигатель (или очень хорошо сбалансированный двигатель, как T-Motor) может иметь большое влияние.
- Не правильные винты, которые не хорошо подобраны к раме и весу или не имеющие тот же тип вращения CCW и CW.
- Получите хорошие пропеллеры, новые APC винты являются хорошим выбором, как часто GemFan carbon пропеллеры.
- Carbon Fiber пропеллеры лучше, но основной компанией был Graupner ушедшей из бизнеса, теперь дешевые пропеллеры Carbon Fiber являются проблемой.
- Carbon fiber пропеллеры дорогие, жесткие, сильные и острые, как бритва – они являются одной из основных угрозой безопасности.
- Большие медленные пропеллеры, безусловно, вызывают более сильную вибрацию чем мелкие и быстрые, но большие медленные пропеллеры намного эффективные.
- Крупные, медленные пропеллеры также делают раму гибкой, поскольку двигатели будут крутить пропеллеры по оси.
- Если вы действительно хотите оптимизировать все вышеперечисленные характеристики,
ваш полетный контроллер скорее всего нужно изолировать от вибрации.
Прошивка и настройка minimosd
Наиболее популярной (но не единственной) прошивкой для MinimOSD является MWOSD. Сначала нужно прошить ей плату, а потом ещё и настроить. Если настроить OSD можно через ПК (подробнее об этом в разделе, посвящённом настройке ПК), то для прошивки необходим FTDI-адаптер или Ардуинка.
#define MINIMOSD#define CLEANFLIGHT
Из параметров выводить на экран я стал только напряжение батареи, время полёта и выбранный полётный режим.
Прошивка и настройка регуляторов
Для прошивки регуляторов у меня тоже есть специальный USB-адаптер, но можно обойтись и без него, подключившись через ПК. Долго думал, ставить Multishot или уже проверенный Oneshot125? С одной стороны, на устаревшем чипе F330 в скорости особой разницы не заметно, с другой — мелодия из «Звёздных войн» при включении и, как пишут на форумах, «более чистый сигнал».
Решили всё неединичные жалобы на то, что моторы стихийно начинают вращаться на максимальных оборотах при подключении к CLI. В итоге поставил BLHeli последней версии (на момент сборки 14.5), включил Damped Light и выставил Motor Timing на «Medium». Позднее откалибровал регуляторы по этой инструкции.
Прошивка полётного контроллера
На этом этапе я застрял дольше всего, так как были проблемы с прошивкой. Оказалось, первый раз шить надо обязательно с замыканием boot-контактов (как в этом видео). Кстати, иногда бывает, что ПК защищён от записи и невозможно прошить новую прошивку. Вот инструкция, как это исправить.
Пожалуй, самой популярной прошивкой на сегодняшний день, вполне заслуженно, является Cleanflight. После её установки достоточно только настроить протокол приёмника и квадрокоптер уже может вполне сносно лететь. Для настройки используется удобная графическая оболочка Cleanflight Configurator.
Благодаря открытому коду прошивки, у неё есть несколько ответвлений (форков). Самым интересным из них является Betaflight от человека под ником Boris B. Прошивка очень динамично развивается и некоторые её «фичи» потом переходят в «родительский» Cleanflight (например, полётный режим Airmode).
Минусом Betaflight является то, что релизы выходят достаточно часто, а стабильность их не всегда высока. Кстати, эта причина на несколько недель задержала написание данной статьи. На момент завершения сборки квадрокоптера как раз вышла версия 2.8.0, которая имела пару ошибок и отличалась недружелюбными дефолтными настройками.
Очень быстро появилась исправленная версия 2.8.1 RC1, но опыт работы программистом подсказал мне, что лучше подождать релиза. Я не прогадал, так как одновременно с релизом версии 2.8.1, появился и Betaflight Configurator. Можно сказать, что это новый этап в истории данной прошивки.
Дело в том, что по мере своего развития Betaflight всё больше и больше отдалялся от Cleanflight и конфигуратор последнего становился всё более и более бесполезным, так как основная часть настроек всё равно делалась через консоль CLI. Кстати, на момент подготовки этой статьи, уже вышла версия Betaflight под номером 2.9.
Теория о pid, параметры и как это работает
PID — это аббревиатура из 3 слов:
- Proportional;
- Integral;
- Deriative.
PID — это такая функция в полетном контроллере, которая считывает информацию с датчиков (как правило это гироскоп и акселерометр), обрабатывает и вносит корректировки, а затем отправляет команды регуляторам оборотов (ESC), а они в свою очередь управляют двигателями (быстрее или медленнее им крутиться).
Так вот, самый главный параметр в PID это Proportional. С помощью этого параметра (буду называть параметром) колебания при полете снижаются до минимума.
Колебания — внешние факторы, которые влияют на квадрокоптер в полете (ветер, притяжение и так далее), а также вибрация и дрожание.
В некотором смысле, P пропорциональна степени контроля над осью (под осью понимается PITCH или ROLL или YAW).
Чем меньше Р, тем меньше контроля над осями, чем больше Р, тем больше контроля со стороны этой функции.
Проблема при завышенном параметре Р в том, что он начинает перевыполнять ожидаемый контроль и это начинает приводить к колебаниям.
Качественные регуляторы оборотов (ESC), а также большая скорость вычисления PID-контуров (скрин ниже, помните же такую настройку?) помогает полетному контроллеру гораздо быстрее и эффективнее вносить корректировки в полет для избавления от колебаний.

А вот I и D участвуют только для исправления оставшихся кусочков ошибок, с которыми не смог или не успел справиться параметр P:
I собирает за Р накопленные ошибки (дрифт), с которыми не справился вовремя Р и исправляет их. Поэтому, если ваш дрон меняет угол наклона после резкой смены положения стика газа (дали резко газ или сбросили), то следует увеличить параметр I. НО, сначала попробуйте увеличить сам Р, вдруг он для вашего дрона слишком низкий и по этому не выполняет свою работу.
D контролирует насколько быстро ось достигает нужного значения. Например, если вы дали квадрокоптеру команду очень быстро остановить двигатели (газ в 0), значение Р при корректировке может проскочить и не внести корректировки. Если вы замечаете такие «симптомы» после резкой смены уровня газа, то увеличение D может помочь снизить колебания, которые возникают сразу после резкой смены уровня газа.
Важно не увеличивать слишком сильно параметр D! Чрезмерное увеличение D приводит к увеличению шума и перегреву двигателей и возможному их возгоранию.
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете. При выполнении процесса обращайте внимание на следующие правила:
- если квадрокоптер клонит влево, то триммировать по рудеру его нужно в правую сторону и наоборот;
- если при полете дрон кивает носом вперед, то триммируем назад и обратно.
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.

Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности. Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах.


