

- Конструируем роботов. дроны. руководство для начинающих — джон бейктал | литрес
- Авантюра
- Дроны и их пилотирование. с чего начать — н. л. астахова | литрес
- Дроны падают
- Дроны с изменяемой геометрией
- Дроны с нуля
- Защитные конструкции
- И снова ресерч
- Летает!
- Подробнее про конструкцию прототипа
- Применение
- Проблемы управления
- Ресерч
- Синергетический эффект
- Твой первый квадрокоптер: теория и практика
- Тенсегрити
- Тенсегрити в робототехнике
- Тенсегрити-роботы в университете иннополис
- Читать онлайн “твой первый квадрокоптер: теория и практика” автора яценко в. с. – rulit – страница 1
Конструируем роботов. дроны. руководство для начинающих — джон бейктал | литрес
Это практическое руководство для тех, кто делает первые шаги в моделестроении дронов, а Джон Бейктал – наиболее известный автор книг для начинающих моделистов. С его помощью, пользуясь пошаговыми инструкциями и многочисленными цветными иллюстрациями, вы построите с нуля роботов на базе квадрокоптера, ракеты, аэростата, корабля и вездехода с навигацией по RFID-меткам. Автор поможет вам укомплектовать набор инструментов и изучить основы электроники и программирования. Кроме того, в книге представлены лучшие образцы дронов-самоделок, наборы готовых деталей для самостоятельной сборки дронов и новейшие модели коммерческих дронов.
Для технического творчества в школе, дома и на занятиях в робототехнических кружках, а также для всех, кто увлекается робототехникой.
Авантюра
 Сергей одобряет авантюрный эксперимент. Джефф Безос тоже
Сергей одобряет авантюрный эксперимент. Джефф Безос тоже
Сергей Савин — старший научный сотрудник, доцент, серьезный ученый с кандидатской в 25 лет и множеством рейтинговых публикаций. Он один из отцов-основателей тенсегрити-робототехники в УИ, получил несколько грантов на развитие тенсегрити в робототехнике.
Дмитрий, Олег и Хэни собирают первого тенcодрона (что-то напоминает). Дмитрий Девитт
— научный сотрудник и аспирант Университета и тот, кто применил самые современные технологии — карбоновые трубки и кевларовые нити, 3D-печать карбоном и мягким пластиком, все реализовал и заставил летать.

Процесс работы по сборке тенсодрона
Ура. получилось!
Дроны и их пилотирование. с чего начать — н. л. астахова | литрес
Рассказано, как выбрать свой первый дрон, запустить его в воздух и не разбить. Описаны функции и особенности дронов различных ценовых сегментов. Изложены основы пилотирования. Особое внимание уделено урокам пилотирования в авиасимуляторе PicaSim, полетам в помещении и на открытом воздухе. Даны практические рекомендации по постановке дрона на учет, получению разрешения на полеты, фото- и видеосъемку.
Электронное приложение-архив на сайте издательства содержит цветные иллюстрации из книги, полезные интернет-ссылки и выдержки из законодательных актов.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом.
Дроны падают

Просто потому что летают. Системы управления, моторы, датчики, автопилоты, бортовые компьютеры и софт — все это разработчики стараются делать как можно надежнее, но риск разбить коптер остается. А если это опытный образец, то сразу нужно изготавливать несколько (штук или десятков?) для отладки. Кроме внутренних факторов, очевидно, остаются и внешние: ветер, пассивные препятствия, активное воздействие.
Вряд ли кто-то будет спорить, дроны падают, сталкиваются, переворачиваются.Можно стараться этого избегать, можно к этому подготовиться. Что лучше? Решать разработчику, пользователю и законодателю.
Я за совместное применение обоих подходов. Но в этой статье сконцентрируемся на том, как избежать последствий падения или столкновения БПЛА.
Дроны с изменяемой геометрией
Другое направление, связанное с идеей защищенного дрона (и не только), — складные дроны и дроны с изменяемой геометрией (foldable и morphing). Имеется ввиду способность дрона изменять свою геометрию в полете. Складные конструкции делают для того, чтобы избежать повреждений дрона (например, дрон может «съежиться» перед ударом), а также дрон может, например, сложиться до компактного размера для пролета в узкие окна.
Возможно, вы видели крутой ролик с дроном с изменяемой геометрией из Швейцарии (да-да, снова ETH EPFL UZH). Нам эта идея тоже интересна и близка, дальше расскажу почему.
Дрон с изменяемой геометрией
Дроны с нуля
RADIOHATA.RU
radiocopter.ru
Портал радиолюбителя, начинающему радиолюбителю, Arduino, Raspberry Pi, книги по радиотехнике и электронике, простые схемы, схемы, радиотехнические журналы, видео, программы для радиолюбителя.
Download magazines: AudioXpress, Circuit Cellar, CQ Amateur Radio, Electronics For You, Elektronika dla Wszystkich, Elektorlabs, Elektor Magazine DVD, Elektronika Praktyczna, Elettronica In, ELV Journal, Funkamateur, Hi-Fi World, Klang Ton, Nuts and Volts, Prakticka Elektronika A Radio, Practical Electronics, Practical Wireless, QST, Servo Magazine, Silicon Chip, Swiat Radio, The MagPi.
Скачать: Журнал Радио, Журнал Радиомир, Журнал Радиоаматор, Журнал Радиолоцман, Журнал Радиоконструктор, Журнал Радиосхема, Журнал Радиохобби, Журнал Ремонт и сервис, Журнал Компоненты и технологии, Журнал Электронная техника.
Скачать книги: Начинающему радиолюбителю, Телевидение и Радио, Источники питания, Для дома и быта, Прием-передача, Автолюбителю, Аудиотехника, Справочники, Учебники, Микроконтроллеры, Arduino, Raspberry Pi, Электроника, Электрика
Скачать: Программы для радиолюбителя, Видеокурсы.
Защитные конструкции
Наиболее прямолинейный подход избежать последствий падения или столкновения БПЛА — защитная клетка и прочие защитные конструкции. Здесь две задачи — защищать дрон от повреждений и защищать среду, где работает дрон, и людей в ней от дрона.
Базовый вариант конструкции, относящейся скорее к защите людей от дрона, — защита пропеллера.

Дрон AR.Drone 2.0 с защитой пропеллеров. Источник
Есть еще забавные решения, вдохновленные оригами, со складными гибкими конструкциями защиты пропеллеров (и даже конструкции рамы), развитие которым дала группа профессора Дарио Флореано в EPFL.
Превалирующей конструкцией защиты самого дрона (а вместе с тем и людей от него) является защитная клетка. Сам квадрокоптер находится внутри клетки.
Дрон Clover от российской COEX
Российская компания COEX делает дроны для учебных целей, которые по умолчанию имеют защиту пропеллеров, а опционально — защитную клетку.
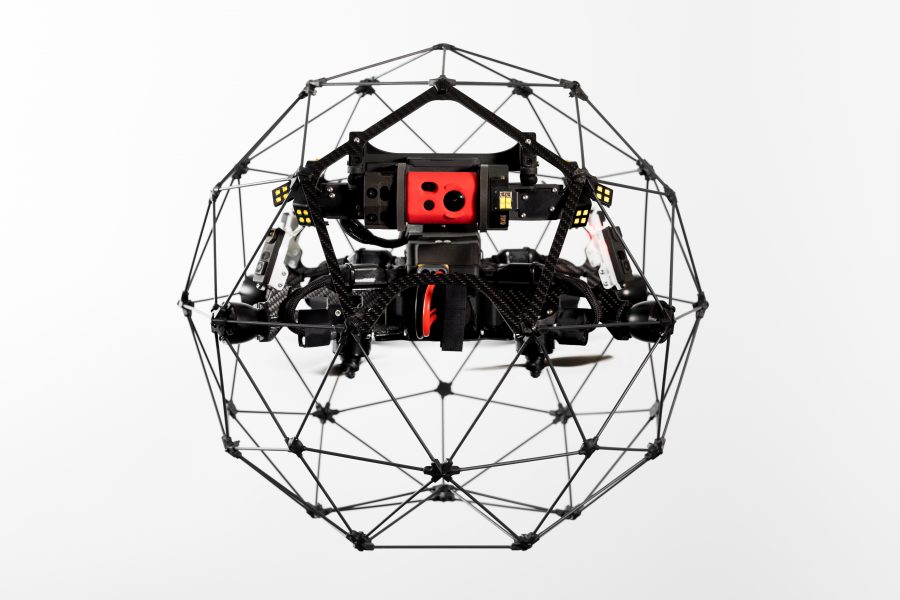
Дрон Flyability ELIOS
Швейцарская (Швейцария — столица дроностроения?) компания Flyability — выпускает, пожалуй, самый коммерчески успешный коптер ELIOS с защитной клеткой для выполнения инспекций внутри помещений. Оригинальность конструкции состоит в креплении защитной клетки к раме коптера на подвижном подвесе с возможностью стабилизации.

Дрон Dronistics
Стартап Dronistics из EPFL (опять Швейцария, это выходцы из группы Dario Floreano) предлагает дрон со складной клеткой для безопасной доставки грузов.
Недостатком таких дронов является увеличение массы конструкции — нужно носить с собой защитную клетку и элементы крепления к БПЛА. Стремление снизить массу защитной конструкции приводит к снижению ее прочности.
И снова ресерч
Потенциал конструкции тенсегрити-дрона гораздо больше простого дрона.
Помните Foldable Drone из
выше? А
Так вот, если активно изменять длины стержней или натяжения тросов тенсегрити-дрона, можно управлять его конфигурацией (или, проще говоря, формой)!
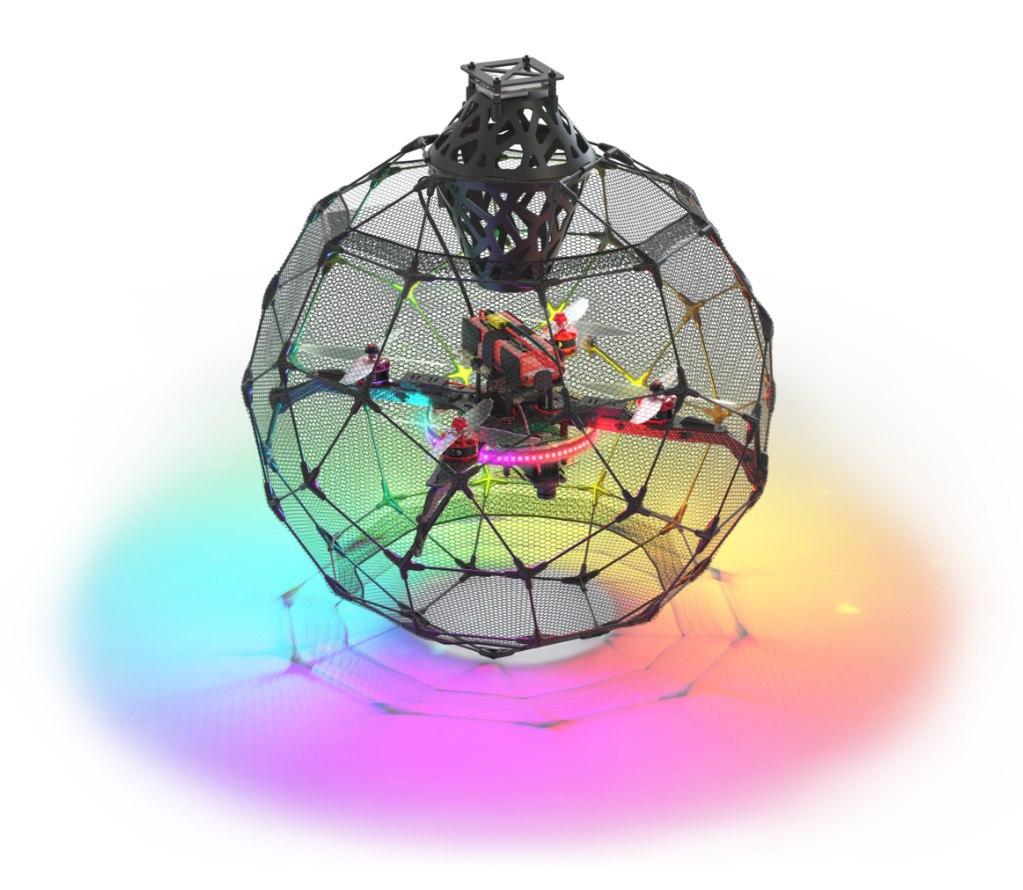
Получается Foldable Morphing Tensodrone. Активно ведем исследования в этой области.
Тенсодрон с изменяемой в полете геометрией Университета Иннополис (концепт)
Применение тенсегрити для летательного аппарата открывает новые исследовательские задачи. Прототип конструкции уже сейчас показывает, что идея работает и её можно применять для защиты БПЛА.
Летает!
Еще Дмитрий — первый актер после тенсодрона в эпичных роликах его полетов. Оцените:
Игра двух актеров в ролях самих себя. Video by DeluuusiOn
Подробнее про конструкцию прототипа
Конструкция первого прототипа дрона получилась такая:
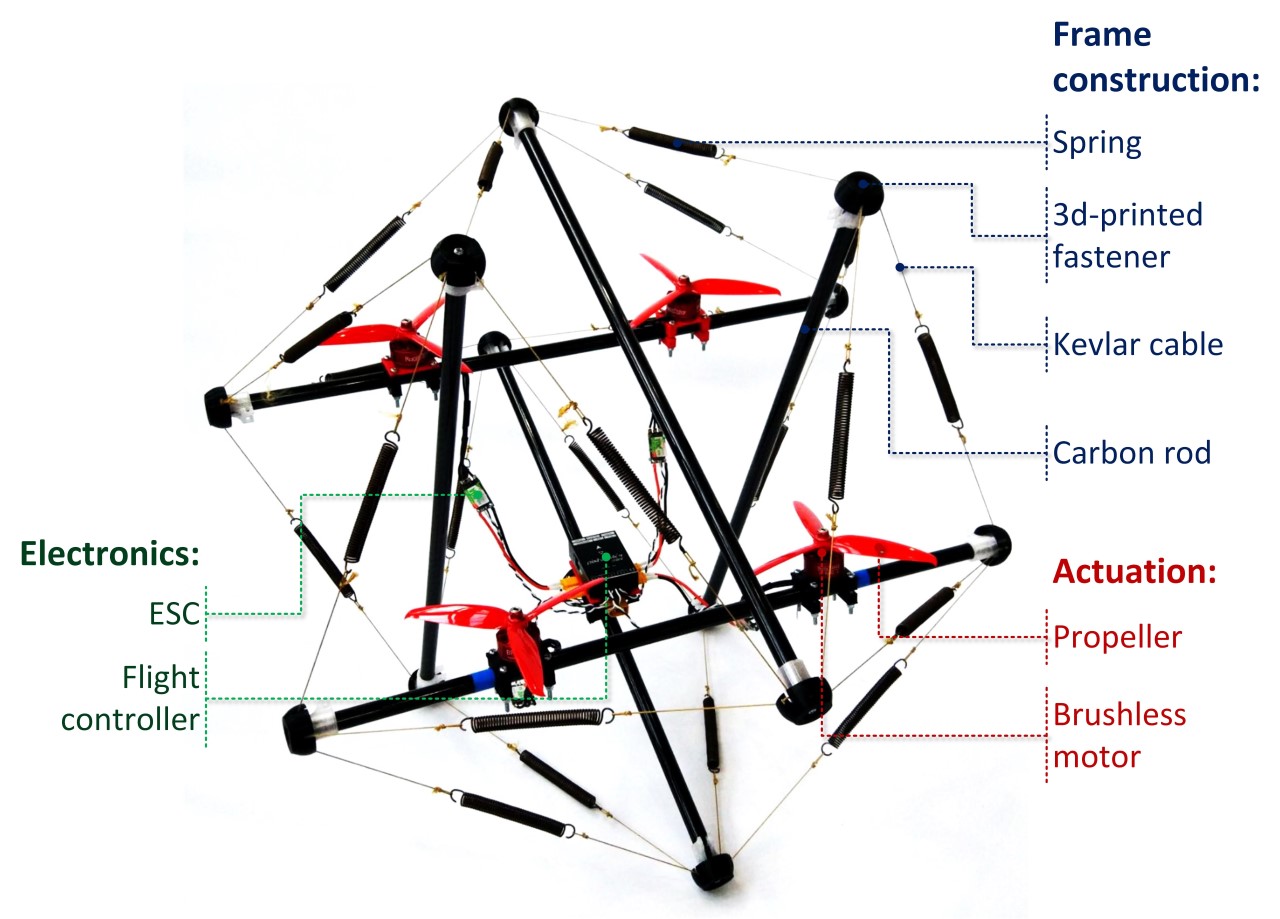
Конструкция прототипа тенсодрона Университета Иннополис
Использована базовая шестистержневая конструкция тенсегрити. В отличие от квадрокоптеров с жесткой рамой у нас две пары двигателей с винтами установлены на различных балках. Также ни один из них не соединен жестко с автопилотом, который расположен на нижней балке.
Бортовая электроника и электромеханические компоненты прототипа дрона включают в себя:
Тросы сделаны из кевларового волокна с изготовленными на заказ пружинами. Стержни изготовлены из карбоновых трубок. Торцевые колпачки и другие мелкие детали напечатаны на 3D-принтере.
Применение
Сейчас эта штука летает сама по заданной миссии (в том числе по GPS на улице, а в помещении — будем использовать визуальную одометрию). Для нас очевидно дальнейшее применение для инспекции помещений.
За исключением управления низкого уровня и формы, тенсодрон — это обычный дрон, мы интегрируем в него наши алгоритмы планирования движения для автономного обследования и картографирования помещений (exploration) с обходом препятствий.
Пример выполнения автоматической инспекции. Магистерский проект Виктора (Victor Massague), нашего выпускника и в ближайшем будущем, надеюсь, сотрудника из Барселоны
Проблемы управления
Основная проблема управления по сравнению с обычным жестким дроном — вибрации, которые, во-первых, больше по амплитуде, во-вторых, разные для контроллера и различных двигателей, т.к. они установлены на различных балках (хотя это же может быть и плюсом — виброразвязка).
Ранние тесты тенсодрона на подвесе: вибрации (извините за вертикальное видео)Ранние тесты тенсодрона в полете: вибрации
Оказывается, у нас был конкурент.
Еще в начале (почти год назад), когда мы делали прототип, мы нашли это видео от ребят из Imperial College London:
Авторы пришли к той же идее, что и мы: применение тенсегрити для дронов — это интересно.
Т.к. никаких подробностей по конструкции и, тем более, прототипа представлено не было, свои работы мы продолжили.
Уже потом, когда у нас был летающий образец, мы получили отчет той же группы:
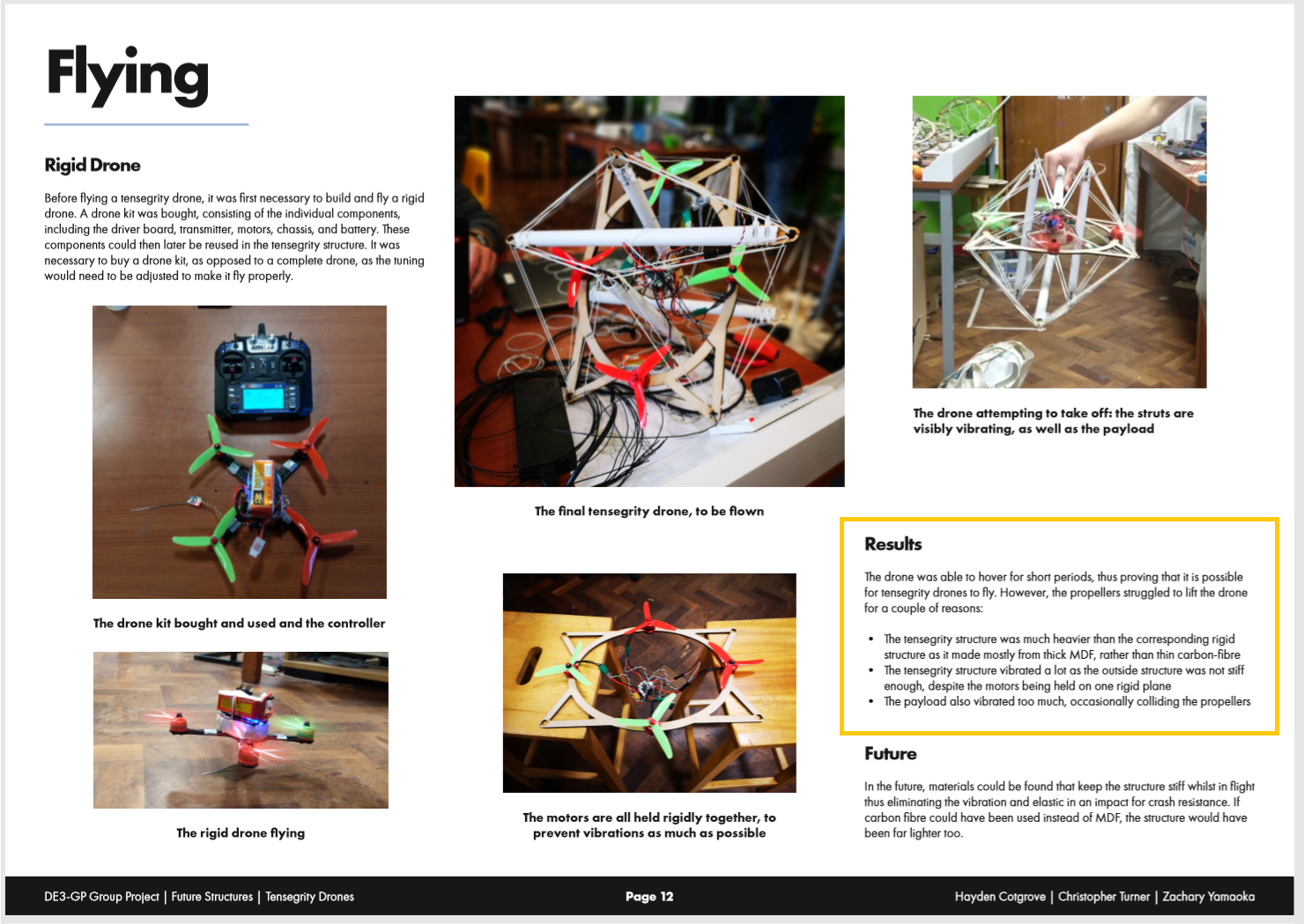
Отчет Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones. Ссылка уже не работает
Во-первых, прототип у них не полетел. Во-вторых, их конструкция — это жесткий дрон внутри тенсегрити-клетки, у нас же элементы дрона встроены в тенсегрити-структуру, которая тем самым является и фреймом и клеткой одновременно. Таким образом, здесь как концептуальные проблемы, так и проблемы качественной реализации.
Возвращаемся к проблемам управления и вибрации. Вот, что написано в отчете Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
Данные проблемы мы решаем с двух сторон — улучшением конструкции для уменьшения вибраций при полете и разработкой алгоритмов управления и оценивания состояния с целью подавления вибраций и более качественного управления, в том числе с учетом дополнительных данных от IMU датчиков на балках и динамической модели тенсегрити-структуры.
Падение на пол с последующим взлетом, в помещении (без монтажа)
Ресерч
Впереди еще много интересного:
подача заявки на патент,
написание научной статьи с подробными исследованиями, апробирование новых вариантов конструкции (ох, их у нас придумано много).
Синергетический эффект
 Вы, наверное, уже понялиI have a drone, I have tensegrity. Ugh! (Tensodrone)
Вы, наверное, уже понялиI have a drone, I have tensegrity. Ugh! (Tensodrone)
Проходил я как-то в нашем гараже мимо привлекающей глаз странной конструкции:
Спросил: «Что это такое?» Мне сказали: «неубиваемая конструкция — роняй, а она не ломается».
Я сломал (на самом деле просто скукожил — изменил форму, потому что резинки были плохо закреплены и сместились). Но такая конструкция нам для дронов нужна! И мы начали авантюрный эксперимент.
Видео с тестом тенсегрити на выживаемость
Твой первый квадрокоптер: теория и практика
Детально изложены практические аспекты самостоятельного изготовления и эксплуатации квадрокоптеров. Рассмотрены все этапы: от выбора конструкционных материалов и подбора компонентов с минимизацией финансовых затрат до настройки программного обеспечения и ремонта после аварии. Уделено внимание ошибкам, которые часто совершают начинающие авиамоделисты. В доступной форме даны теоретические основы полета мультироторных систем и базовые понятия работы со средой Arduino IDE. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем OSD, телеметрии, беспроводного канала Bluetooth и популярных навигационных модулей GPS Ublox. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера. Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ для компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера. Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом.
На нашем сайте вы можете скачать книгу “Твой первый квадрокоптер: теория и практика” Валерий Яценков бесплатно и без регистрации в формате pdf, читать книгу онлайн или купить книгу в интернет-магазине.
Тенсегрити
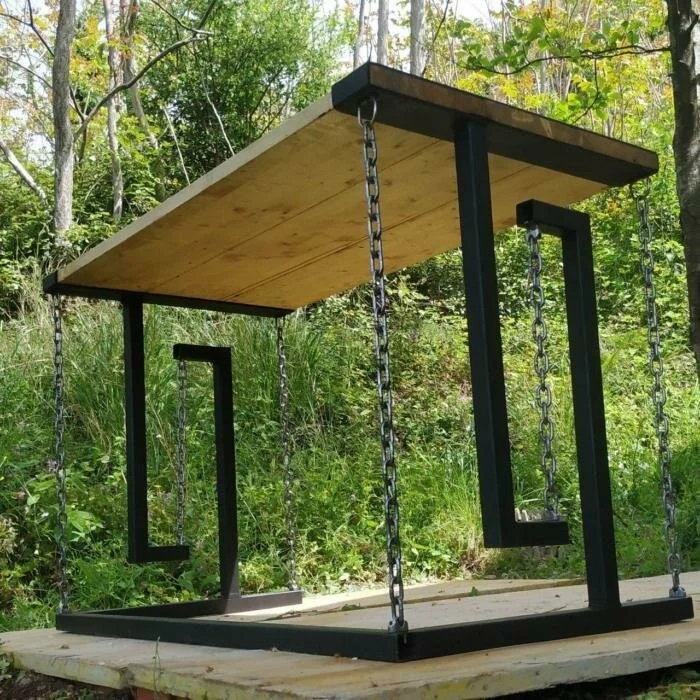 Тенсегрити-стол. Источник
Тенсегрити-стол. Источник
Тенсегрити — способность каркасных конструкций использовать взаимодействия работающих на сжатие цельных элементов с работающими на растяжение составными элементами для того, чтобы каждый элемент действовал с максимальной эффективностью и экономичностью (Вики).
Известно множество современных применений такого подхода в архитектуре, откуда он и появился, прежде всего при проектировании мостов.

Самый большой в мире мост, выполненный в стиле тенсегрити, Австралия. Источник
Тенсегрити в робототехнике
Одно из старейших направлений робототехники — промышленные манипуляторы — сейчас переживает новую стадию своего развития, связанную с т.н. коллаборативной робототехникой. В речи специалистов в этой области можно с большой частотой услышать два термина — stiffness и compliance.
В промышленной робототехнике термин compliance относится к гибкости и податливости. Неподатливый (non-compliant), жесткий (stiff) робот — это устройство, которое работает независимо от того, какие внешние силы на него воздействуют. Энд-эффектор робота будет каждый раз следовать точно по одной и той же траектории.
С другой стороны, энд-эффектор податливого робота может двигаться по различным траекториям для выполнения задачи и прилагать различные усилия к объекту. Например, робот может схватить яйцо, не раздавив его. Управляемая жесткость лежит в основе коллаборативной робототехники.
Идеи применения тенсегрити в робототехнике идут как раз из коллаборативной и «мягкой» (“soft”) робототехники. Тенсегрити структуры — легкие, ударопрочные и дают возможность контролировать их жесткость (податливость) и конфигурацию (форму).
Тенсегрити-роботы в университете иннополис
В УИ мы разрабатываем математический аппарат для моделирования, проектирования и управления робототехническими системами с напряженно-связанными структурами с переменной жесткостью (это и есть тенсегрити). Это фундаментальная работа, применение которой можно найти в самых разных роботах, например, тенсегрити-манипуляторах или шагающих роботах.

Олег первым у нас начал прототипировать тенсегрити-роботов — сначала из деревянных палочек и резинок. Фото конструкции из палочек для суши, пожалуй, тоже еще хранит история чатов.
Читать онлайн “твой первый квадрокоптер: теория и практика” автора яценко в. с. – rulit – страница 1
Посвящаю эту книгу самым дорогим для меня людям: дочери Полине, супруге Ольге и, конечно же, моей маме — с любовью и благодарностью за поддержку
От автора
Уважаемый читатель!
Автор не ставил перед собой задачу создать исчерпывающую энциклопедию или настольный справочник. Вы держите в руках руководство для новичков, назначение которого — помочь вам построить свой первый квадрокоптер, обойдясь без нелепых технических ошибок и чрезмерных денежных затрат. Интеллектуальная цена вхождения в это сложное хобби весьма высока. Автор постарался сберечь для вас главную ценность — время.
В книге плотно переплетаются теория и практика, иначе в авиамоделизме нельзя. Материал не обязательно читать по порядку. Обращайтесь к нужным главам и разделам по мере работы над своей конструкцией. Рекомендуем, прежде всего, ознакомиться с общими принципами работы квадрокоптера и определиться с набором компонентов, которые необходимо приобрести. Поскольку наиболее выгодный путь для покупки компонентов — это заказ в интернет-магазинах, то с момента заказа до получения может пройти несколько недель. Пока заказанные компоненты находятся в пути, вы можете более подробно изучить теорию и установить на компьютер необходимое программное обеспечение.
Это важно: автору пришлось пойти на сознательные упрощения и сокращения некоторых сегментов информации, чтобы сделать ее более доступной. Далее вы самостоятельно будете развиваться в наиболее интересном для вас направлении: видеосъемка, FPV, развлекательные полеты, маршрутные полеты по GPS и т. д. Все, о чем вы прочтете, проработано и проверено автором на практике.
Подбор компонентов и программного обеспечения для первого квадрокоптера основан на опыте тысяч ваших предшественников из разных стран и означает лишь, что собранный по нашим рекомендациям аппарат будет недорогим, надежным, простым в управлении и полетит сразу после окончания сборки. Зачастую выбор компонентов и программного обеспечения является поводом для ожесточенных “религиозных войн” на форумах. Пока воздержитесь от участия в них и не воспринимайте слишком серьезно противоречивые мнения сторон.
Часть I. ТЕОРИЯ
Глава 1
Принцип работы квадрокоптера
Квадрокоптеры, которым посвящена эта книга, являются частным случаем мультикоптеров — многороторных устройств, которые держатся в воздухе, управляются и перемещаются только за счет несущих пропеллеров. В этом мультикоптеры схожи с вертолетами. Для простоты и краткости в обиходной речи мультикоптеры часто называют просто коптерами. Мы тоже будем использовать этот термин в случаях, когда количество роторов не играет роли.
Классический квадрокоптер представляет собой крестообразную раму, на концах лучей которой вертикально закреплены моторы (рис. 1.1).
Рис. 1.1.Схема конструкции простейшего квадрокоптера
Воздушные винты, расположенные на диагональных лучах рамы, создают суммарную вертикальную тягу. Синхронно регулируя обороты моторов, можно заставить квадрокоптер подниматься вверх, зависать или опускаться. Если изменить обороты моторов неравномерно, то квадрокоптер отклонится от горизонтального положения и полетит в сторону отклонения. Например, при увеличении оборотов двух задних моторов его задняя часть приподнимется и квадрокоптер полетит вперед. За счет неравномерного изменения оборотов всех моторов квадрокоптер способен лететь в произвольном направлении.
Очевидно, что при наклоне рамы за счет появления горизонтальной составляющей вектора тяги Vx уменьшится вертикальная составляющая Vy и квадрокоптер начнет терять высоту. Это явление иногда называют “соскальзыванием”, потому что коптер начинает двигаться вниз по диагональной траектории (рис. 1.2), словно скользя по склону. Поэтому для поддержания высоты при наклоне квадрокоптера обороты всех моторов должны возрасти на некую одинаковую компенсирующую величину.
Рис. 1.2.Векторы тяги квадрокоптера
Вращающиеся винты создают реактивный крутящий момент, который старается развернуть квадрокоптер в сторону, противоположную вращению винта. Поэтому в квадрокоптере два винта вращаются по часовой стрелке и два против часовой стрелки, взаимно уравновешивая реактивные моменты. Если увеличить обороты моторов, вращающихся по часовой стрелке, и в равной мере уменьшить обороты у вращающихся против часовой стрелки, то суммарная вертикальная тяга не изменится, однако реактивный момент раскомпенсируется и рама начнет поворачиваться против часовой стрелки. Аналогично можно заставить квадрокоптер поворачиваться по часовой стрелке.
§
Угловые отклонения по осям следовало бы называть “тангаж”, “крен” и “рыскание”, но на практике прижились англоязычные термины, которые читателю следует запомнить: Pitch (наклон вперед-назад), Roll (наклон вправо-влево), Yaw (вращение в горизонтальной плоскости) и Throttle (общий газ) — рис. 1.3.
Рис. 1.3.Соответствие отклонений коптера рычагам на пульте
Оборотами моторов в режиме реального времени управляет специальная вычислительная система на основе достаточно быстродействующего микроконтроллера, так называемый полетный контроллер. Он постоянно опрашивает встроенные гироскопы, акселерометры, барометр, сигналы от приемника радиоуправления и на основе полученных данных рассчитывает управляющие сигналы для каждого мотора в отдельности.
Теперь, когда мы рассмотрели общие принципы работы квадрокоптера, можно проанализировать достоинства и недостатки этого типа летательных аппаратов.
Достоинства
• Простота конструкции и низкая стоимость ущерба при аварии.
Как мы уже говорили, квадрокоптеры держатся в воздухе только за счет несущих пропеллеров и этим похожи на вертолет. Однако полноценная модель вертолета имеет весьма сложную и точную механическую часть — автомат перекоса, позволяющий управлять положением вертолета в пространстве. Кроме этого, вертолет оснащен механизмом отбора мощности на хвостовой винт и узлом переменного шага этого винта. Только простые и дешевые маленькие модели вертолетов не имеют автомата перекоса, но и управляются они намного хуже. По сравнению с вертолетом механическая часть даже у большого профессионального квадрокоптера предельно проста и не зависит от размеров модели. Это жестко закрепленные на лучах рамы моторы, на валы которых надеты воздушные винты.
Автомат перекоса вертолета требует сложной и длительной регулировки даже при наличии опыта. Каждая авария вертолета, даже незначительная, как правило, дорого обходится владельцу (автор убедился в этом на собственном опыте). Причем в запасе приходится держать широкий ассортимент различных запчастей. Самодельный квадрокоптер можно разбить почти полностью и восстановить за один выходной день, пользуясь в основном подручными материалами. В запасе достаточно иметь пару запасных валов и подшипников для моторов, один-два регулятора оборотов, десяток винтов правого и левого вращения и материал для изготовления лучей рамы.
• Простота управления и обучения.
Несмотря на то, что квадрокоптер, как и вертолет, управляется за счет смещения вектора тяги, он более стабилен в воздухе (чем крупнее, тем стабильнее). Управление квадрокоптером интуитивно более понятно и легче осваивается. Кроме того, благодаря наличию полетного контроллера, правильно собранный и минимально настроенный квадрокоптер способен висеть в воздухе практически без участия пилота.
• Простота самостоятельного изготовления.
Если заранее приобрести минимальный набор необходимых компонентов и иметь обычные инструменты, то изготовить простой, но качественный квадрокоптер можно за один-два выходных дня. При создании рамы можно обойтись парой кусков фанеры и несколькими деревянными рейками, и это не ухудшит летные качества устройства.
• Возможности для творчества.
К сожалению, в последнее время радиолюбителям все труднее найти прикладную область для своего хобби. Многое из того, что можно было бы изготовить своими руками, проще и дешевле купить в готовом виде, с промышленным качеством. В схожей ситуации сейчас и программисты-любители. Писать любительские прикладные программы стало либо слишком сложно, либо незачем.
Квадрокоптеры придают новый смысл многим увлечениям. Можно участвовать в разработке открытого программного обеспечения или создавать свое; разрабатывать с нуля и изготавливать на самодельном станке с ЧПУ сложные детали конструкции; экспериментировать с аэровидеосъемкой или работать паяльником. Менять и развивать конструкцию самодельного квадрокоптера можно практически бесконечно.


