

- Введение
- Силовая установка
- Аккумулятор. распределение питания
- Мотор. esc. распределение питания
- Esc. контроллер полёта.
- Связь
- Приёмник. полётный контроллер.
- Сборка рамы
- Монтаж
- Размещение акб.
- Монтаж батареи
- Зарядка акб
- Размещение и монтаж контроллера полёта
- Размещение и монтаж esc
- Rc приёмник и антенна
- Размещение и монтаж gps-антенны
- Aux каналы.
- Изменение направления вращения моторов квадрокоптера.
- Мотор. esc. распределение питания
- Настроим квадрокоптер своими руками.
- Особенности выбора комплектующих
- Очки/шлем
- Подключение fpv камеры.
- Приёмник. полётный контроллер.
- Прошивка.
- Размещение акб.
- Разработка
- Сборка
- Этапы сборки квадрокоптера
Введение
Теперь, когда вы выбрали все основные компоненты для вашего БПЛА, вы можете приступать к сборке. В этом руководстве будут рассмотрены распространенные ошибки при сборке многороторного БПЛА, а также приведены некоторые полезные советы по настройке. Этот урок не будет охватывать такие элементы, как камера/FPVсистема, дальнобойные устройства или другие аксессуары (рассмотрим на 7 уроке).
Компоненты, которые вы должны иметь на этом этапе:
- Рама (купленная или исполненная вручную)
- Моторы, ESC, пропеллеры, аккумулятор, зарядное устройство
- Плата распределения питания/соединительные жгуты
- Контроллер полёта и устройство связи (предложено радиоуправление)

Силовая установка
Для достижения целей этого урока, силовая установка вашего БПЛА будет включать следующие компоненты:
- Моторы
- ESC
- Распределение питания (плата или соединительные жгуты)
- Аккумуляторная батарея
- Полётный контроллер
Обратите внимание, что пропеллеров в списке нет. Не устанавливайте пропеллеры на данном этапе! Несущие винты будут подключены только на 6 уроке. Поскольку это ваш первый беспилотник, мы рекомендуем выполнить «безрамное» подключение электрической части, перед тем, как установить всё на раму; с целью проверить все соединения и устранить выявленные неисправности.
Аккумулятор. распределение питания
Соединение между аккумулятором и системой распределения питания должно быть относительно простым, если они оба имеют одинаковый тип разъёма. Если это так, то переходите к следующему шагу. Если же разъёмы разные, то не в коем случае не перерезайте провода аккумулятора для отделения разъёма; это может вызвать короткое замыкание и неприятный удар током! Вместо этого вы можете подобрать переходник и использовать его между разъёмом на АКБ и разъёмом платы распределения питания. Другим вариантом может выступать поиск ответного разъёма к разъёму АКБ, и его покупка; затем отрежьте существующий разъём от распределителя питания и припаяйте купленную замену, предварительно убедившись в отсутствии связи между положительным и отрицательным контактами.
Важно отметить, что большинство мультироторных БЛА не имеют переключателя вкл/выкл, поэтому питание подаётся и отключается путем подключения и отсоединения основной батареи от разъёма распределителя питания, поэтому их разъемы должны быть надёжно закреплены, а провода/точки пайки хорошо изолированы посредством термоусадочной трубки и/или изолентой.
Прежде чем продолжить, отсоедините аккумулятор от распределителя питания.

Мотор. esc. распределение питания
Плата распределения питания (ПРП) или проводное распределение в первую очередь служат для распределения питания от основной батареи к каждому ESC. Напряжение подается на ESC «как есть», поэтому нет необходимости повышать (увеличивать) или понижать (уменьшать) напряжение. Если ваш беспилотник имеет четыре двигателя, то у вас должно быть четыре ESC, и, следовательно, ваша распределительная плата/проводное распределение должны в конечном итоге разделить основную батарею на четыре соединения. Если же ваша ПРП имеет шесть подключений, а вы собираете квадрокоптер, то вам просто не нужно подключать последние два. Если вы строите гексакоптер, ваша ПРП должна распределить питание от основной батареи на шесть соединений. ESC включает в себя следующие провода:
- Один 3-проводной 0.1-дюймовый шлейф с R/C разъёмом, в числе которых чёрный контакт обычно является заземлением, красный обеспечивает 5В выход (через BEC*), а жёлтый/белый является входом сигнала.
- Три раздельных провода служат для подключения к трём проводам на бесколлекторном моторе постоянного тока (обычно поставляются с разъёмами типа «пуля» с внутренней резьбой, которые либо уже припаяны, либо включены в комплект).
- Два входных разъёма для подключения аккумулятора к PDB (некоторые включают паяные разъёмы с пайкой, какие-то входят в комплект, а бывает вообще не входят).
*ESC обычно имеют встроенную цепь устранения батареи (или BEC), которая преобразует напряжение основной батареи в 5В для последующего питания приёмника и контроллера полёта. 5В обычно подаётся через RC разъём от ESC (обычно центральный/красный контакт). Вам потребуется только один BEC для питания контроллера полёта.

Если плата распределения питания использует разъёмы, которые не совпадают с разъёмами на ESC или АКБ, то вам нужно будет, либо приобрести переходники (адаптеры), либо приобрести новые разъёмы и заменить их на ESC или ПРП. Преимущество остаётся за платой распределения питания, разъёмы которой совпадают с разъёмами АКБ и ESC. Чаще всего литий-полимерная аккумуляторная батарея БЛА может иметь DEANS разъём, XT60 или EC3.
Если вы хотите запитать дополнительную слаботочную электронику (светодиодную систему освещения, подвесное устройство и т.д.), но на вашей плате распределения питания нет запасных соединений, вы можете использовать зарядный кабель аккумуляторной батареи. Белый зарядный разъём обычно имеет один контакт для заземления и по одному контакту для каждой банки (1S, 2S, 3S и т.д.) используемой в сборке LiPo АКБ. Несмотря на то, что этот разъём действительно предназначен только для зарядки батареи, он может обеспечивать выходное напряжение равное 3.7В от каждого контакта и может использоваться для питания слаботочной электроники, такой как подвесная система или светодиоды.

- Удалите красный повод у каждого 3-контактного R/C разъёма регулятора скорости, за исключением одного. Рекомендуется это сделать таким образом, чтобы при необходимости вы всегда могли подключить их обратно. Замотайте конец каждого исключённого провода изолентой или используйте для изоляции термоусадочную трубку, чтобы в последствии они не смогли контактировать с другими элементами электроники. Тот единственный красный провод, что остался не тронутым, будет питать используемый в сборке полётный контроллер.
- Подключите два питающих провода каждого ESC к распределительной плате, убедившись, что красный провод подводится к плюсу ( ), а чёрный провод к минусу (-).
- Если используемая вами плата распределения питания имеет свои R/C разъёмы, то в данном случае решать вам, подключать R/C выводы каждого ESC к R/C разъёмам на этой плате или подключать их напрямую к полётному контроллеру.
- Подсоедините каждый из трёх разъёмов моторов к трём разъёмам регуляторов скорости (ESC). На данный момент порядок подключения этих разъёмов не важен (если повлияет на направление вращения, то будет исправлено по мере необходимости позднее).
Обратите внимание, что если вы решите на данном этапе убрать или скрыть проводку, позднее вам может потребоваться доступ к некоторым соединениям в соответствии с процедурой, описанной в 6 уроке, в частности, поменять местами соединения между ESC и мотором, чтобы двигатель вращался в противоположном направлении.

Esc. контроллер полёта.
Сейчас вы можете подключить R/C входы регуляторов скорости к контроллеру полёта. Выбранный вами контроллер полёта должен иметь схему, в которой показано, к каким контактам контроллера подключаются моторы вашей мультироторной сборки. Также в этой схеме должно быть показано направление вращения каждого мотора, но, опять же, пока вам не нужно учитывать направление.
- Ознакомьтесь со схемой подключения между моторами/ESC и полётного контроллера в руководстве по эксплуатации ПК.
- Подключите R/C разъёмы каждого ESC к соответствующим контактам полётного контроллера, убедитесь, что провод заземления (обычно чёрный) подключается к контакту заземления контроллера полёта, а сигнальный контакт (белый или желтый) подключается к сигнальному контакту на контроллере полёта.
- Только один из RC разъёмов будет по-прежнему иметь красный (питающий) контакт.

Связь
Приёмник. полётный контроллер.
Предположим, что на этом уроке вы сделали выбор в пользу радиоуправления в качестве устройства ввода. Если вы хотите использовать WiFi, Bluetooth или другой способ ввода, пожалуйста, прочитайте инструкцию по контроллеру полёта и найдите последовательный ввод; в этом разделе будет описано, как/куда подключить устройство последовательного ввода к контроллеру полёта. Скорее всего, вам потребуется найти и подключить передающее (Tx), принимающее (Rx), напряжение (5В) и GND-контакты от беспроводного устройства к передатчику, обеспечивая Rx от одного к Tx другого, и наоборот.
Ваш RC передатчик должен приходить в комплекте с соответствующим RC приёмником. Приёмник должен быть привязан к передатчику, чтобы вы могли удалить перемычку привязки с приёмника (если она есть). В комплект также может входить держатель АА батарейки, которая предназначена для питания приёмника, но мы не будем использовать её, поскольку BEC будет питать как приёмник, так и контроллер полёта. Чтобы узнать, какие каналы RC приёмника подключаются к каким контактам на контроллере полёта, вам нужно взглянуть на руководство пользователя как контроллера полёта, так и RC системы.
В руководстве к контроллеру полёта будут указаны местоположения следующих контактов, которые должны быть согласованы и подключены к приёмнику:
- Throttle
- Pitch
- Yaw
- Roll
- Вспомогательные (Aux) переключатели 1, 2, 3 и т.д.

Теперь вы можете сделать следующие подключения:
- Прочитайте руководство к контроллеру полёта, чтобы увидеть, какой входной R/C контакт связан с какой из перечисленных выше функций.
- Прочтите руководство к передатчику, чтобы узнать, какой канал связан с каждой из функций.
- Некоторые RC передатчики могут быть перепрограммированы для изменения функций каждого контакта. Если вы решите изменить какой нибудь вход (джойстик или переключатель), делайте это лишь после того, как убедитесь, что знаете, какой канал на приёмнике соответствует какой функции. Throttle, Pitch, Yaw, и Roll всегда должны быть связаны с двумя стиками/джойстиками, а не с переключателями или кнопками.
- Подключите канал Throttle на приёмнике к входу Throttle на контроллере полёта.
- Подключите канал Pitch на приёмнике к входу Pitch на контроллере полёта.
- Подключите канал Yaw на приёмнике к входу Yaw на контроллере полёта.
- Подключите GND на контроллере полёта (обычно третий ряд контактов) к GND на приёмнике (обычно третий ряд контактов).
- Если будет использоваться вспомогательный вход, подключите Aux 1 на приёмнике к Aux 1 на контроллере полёта и так далее.
Вы можете использовать 3-контактные серво провода для каждого из каналов, но только один из каналов (может быть любым) должен иметь напряжение и заземление; остальным нужен только сигнальный провод. Все соединения могут иметь GND к GND, хотя требуется только одно. Еще раз, приёмнику не нужна отдельная батарея, поскольку он будет получать питание от контроллера полёта, который получает питание от BEC от одного из ESC.
Сборка рамы
Если вы строите свою собственную раму, вы можете собрать её на этом этапе. Если вы приобрели рамный комплект, следуйте инструкции по сборке. Обратите внимание, что вам может потребоваться разобрать определенные участки, чтобы облегчить подключение или убрать (скрыть) элементы электрики. Цель заключается в том, чтобы гарантировать, что ничто не ослаблено, все провода надёжно закреплены, и ничто не может выпасть из рамы или запутаться.

Монтаж
Размещение акб.
Батарея, используемая для питания, часто является самым тяжелым элементом на БПЛА и может составлять от 1/4 до 1/2 его общего веса. Поэтому, место её установки очень важно. Идеальное расположение основного аккумулятора должно быть в центре коптера, чтобы все двигатели могли выдерживать примерно одинаковую нагрузку. Если аккумулятор расположен ближе к задней части коптера, задние моторы должны будут обеспечивать большую тягу, чем моторы спереди, и, соответственно, максимальная общая тяга будет ограничена (когда задние двигатели находятся на полной тяге, на моторах спереди тяги не будет). Принимая во внимание, что обычный подход в мультироторной конструкции состоит в том, чтобы коптер был симметричен относительно центральной оси (или, по крайней мере, одной оси), поэтому батарею следует размещать вдоль этой центральной линии, а не смещать ее в одну или другую сторону.
Далее вам нужно будет решить, на какой высоте разместить аккумулятор. Есть несколько мест, где батарея может быть установлена:
- Под рамой (коптер будет тяжелым снизу, более стабильным и менее акробатичным).
- Прямо под моторами (обычно внутри рамы); возможно, одно из лучших мест.
- На той же высоте, что и двигатели или несущие винты (например, устанавливается в верхней части рамы).
- Над пропеллерами (БПЛА будет сверху тяжелым и более склонным к перевороту).
Для достижения наилучших лётных характеристик, в идеале АКБ должна быть расположена в положении 3, описанном выше. Положение 4 создает эффект перевернутого маятника, и, если БПЛА наклонится за пределы определенного угла, то дрон будет стремиться к перевороту. Положение 1 создаст достаточно стабильную платформу, которая по своей природе склонна оставаться на одном уровне, но при этом крайне не годится для акробатики. Поэтому большинство разработчиков выбирают положение 2 и размещают аккумулятор либо непосредственно под рамой, либо внутри нее. Такой подход освобождает пространство под рамой для полезной нагрузки, такой как система подвеса, а пространство выше для контроллера полёта и другой электроники, чтобы они были максимально доступны.

Монтаж батареи
Существует множество общепринятых способов крепления батареи к раме, которые включают в себя:
- Ремни с липучкой
- Самоклеющаяся липучка (одна сторона клеится на АКБ, а другая на раме)
- В раме
Ремни с липучкой являются наиболее распространенными для пользовательских дронов среднего «стандартного» размера, тогда как заключение в раме чаще всего встречается на коммерческих беспилотниках, рамы таких БЛА зачатую отливаются под давлением и оставляют внутри пространство специально под определенный аккумулятор. Липучки в идеале следует использовать только в том случае, если батарея относительно лёгкая; вместо одного короткого отрезка в центре, рекомендуется клеить одну полосу по всей длине батареи. Если вы используете ремни на липучке и обнаруживаете, что батарея склонна к выдвиганию из-за отсутствия сцепления, рекомендуется добавлять резиновые полоски в места, где батарея контактирует с ремнями. Не рекомендуется использовать клей для крепления аккумулятора к раме. Если вы не используете БЛА, извлеките АКБ и храните её в безопасной LiPo сумке (LiPo safe bag) или керамическом резервуаре.
Зарядка акб
Весьма вероятно, что вы выбрали литий-полимерный (LiPo) или другой литиевый аккумулятор. Большинство LiPo аккумуляторов свыше 3.7В имеют для зарядки отдельный кабель с многоконтактным разъёмом, в то время как силовой кабель можно определить по наличию двухконтактного разъёма с более крупными проводами, способными выдерживать большой ток разряда. Разъём для зарядки обычно имеет по одному контакту для каждой банки батареи, а также общий контакт заземления.
Из-за опасностей, связанных с LiPo батареями (водород и электричество), обычной практикой является полное извлечение батареи из дрона, когда она не используется, и помещение ее в безопасную сумку «LiPo Safe». Эта же сумка используется при зарядке батареи (подключите батарею к зарядному устройству, поместите батарею в сумку (оставив зарядное устройство вне сумки) и закройте её (обычно в ней есть клапан с липучкой).
Размещение и монтаж контроллера полёта
В идеале контроллер полёта должен быть расположен в центре дрона на той же высоте, что и моторы. Если это невозможно, то контроллер можно поставить чуть выше или ниже. Не стоит устанавливать контроллер полёта больше в направлении левой или правой стороны, и избегайте установки его со сдвигом вперед или назад. Если вы приобрели раму для БПЛА, то у таких зачастую есть монтажные отверстия для контроллера полёта, которые находятся в оптимальном месте. Контроллер полёта может быть закреплен любым из следующих основных способов:
- Винты/Гайки /Стойки (основные)
- Двухсторонняя клейкая лента (убедитесь, что она достаточно прочная)
- Двусторонняя клейкая пена (для достижения демпфирующего эффекта)
- Резиновые демпфирующие втулки (для значительного демпфирования)
Некоторые полётные контроллеры либо имеют, либо могут иметь опционально защитный кейс. Этот корпус защищает печатную плату от пыли и нескольких капель дождя и может принять на себя удар в случае краша. В некоторых случаях используются резиновые демпферы/втулки, которые уменьшают вибрацию, вызванную несбалансированными моторами/пропеллерами. Идеальная сборка — макс. жесткая рама с идеально сбалансированной силовой установкой и хорошо изолированным от вибраций контроллером полёта.

Размещение и монтаж esc
ESC подключаются между моторами, распределительной платой/кабелем и контроллером полёта. Стандартная длина проводов ESC и моторов, как правило не требует их удлинения в процессе сборки мультиротора. ESC должны обеспечивать высокий ток и, соответственно могут сильно нагреваться в процессе эксплуатации. Идеальное расположение регулятора находится непосредственно под лопастями несущего винта на опорном луче; такой подход обеспечит ему хорошее охлаждение. ESC может быть прикреплен к опоре с помощью стяжек (по одной на каждой стороне ESC), ленты или почти любым другим способом, который не будет препятствовать отводу тепла. ESC не должны устанавливаться в месте, ограничивающем рассеивание тепла (например, в закрытой металлической коробке), и должны располагаться на расстоянии от чувствительной электроники, такой как контроллер полёта или приёмник.

Rc приёмник и антенна
Сам RC приёмник может быть расположен почти в любом месте на беспилотнике. Исключением являются места находящиеся в непосредственной близости с силовыми проводами (подальше от АКБ и ESC). Приёмники, входящие в состав RC-систем, как правило, не имеют какого-либо конкретного способа монтажа, поэтому качественный двухсторонний клей является лучшим вариантом.

Антенна, которая крепится к приёмнику, обычно представляет собой гибкий провод. Этот провод должен быть расположен таким образом, чтобы ничего не мешало приёму сигнала. Её можно закрепить либо вдоль опорного луча (с противоположной стороны от ESC), либо вдоль посадочной опоры. На 6 уроке мы поговорим больше о тестировании дальности, которое должно быть сделано, чтобы узнать максимальное расстояние, на котором приёмник принимает сигнал от передатчика. Тестирование дальности может потребовать, чтобы вы поэкспериментировали с разными местами расположения приёмника и антенны.
Размещение и монтаж gps-антенны
В отличие от проводной антенны приёмника, антенна GPS приёмника имеет тенденцию быть либо «Duck» антенной (жёсткий пластиковый зафиксированный столбик, 90 градусов или навесной), либо прямоугольной и относительно плоской. Некоторые GPS устройства имеют встроенную антенну (то есть антенна является частью печатной платы). В любом случае GPS антенна должна быть установлена в верхней части БПЛА, чтобы спутниковые сигналы не блокировались. Монтаж прямоугольной антенны обычно выполняется с помощью двухсторонней ленты, а монтаж «Duck» антенны обычно включает в себя сверление монтажных отверстий. Если «Duck» антенна подключается непосредственно к контроллеру полёта, то никакого дополнительного монтажа не требуется.
На данном этапе у вас должен быть полностью собранный и подключённый БПЛА, за исключением пропеллеров. 6 урок включает настройку и тестирование передатчика, программного обеспечения контроллера полёта, предполётную проверку и первый полёт.
Aux каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных.
Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Теперь идем в Betaflight и делаем все точно также, как указано на картинке (чтобы ползунки стали активными нужно нажать на кнопку «Добавить диапазон» и выбрать соответствующий канал AUX). 
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.

- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация

- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Мотор. esc. распределение питания
Плата распределения питания (ПРП) или проводное распределение в первую очередь служат для распределения питания от основной батареи к каждому ESC. Напряжение подается на ESC «как есть», поэтому нет необходимости повышать (увеличивать) или понижать (уменьшать) напряжение.
Если ваш беспилотник имеет четыре двигателя, то у вас должно быть четыре ESC, и, следовательно, ваша распределительная плата/проводное распределение должны в конечном итоге разделить основную батарею на четыре соединения. Если же ваша ПРП имеет шесть подключений, а вы собираете квадрокоптер, то вам просто не нужно подключать последние два.
- Один 3-проводной 0.1-дюймовый шлейф с R/C разъёмом, в числе которых чёрный контакт обычно является заземлением, красный обеспечивает 5В выход (через BEC*), а жёлтый/белый является входом сигнала.
- Три раздельных провода служат для подключения к трём проводам на бесколлекторном моторе постоянного тока (обычно поставляются с разъёмами типа «пуля» с внутренней резьбой, которые либо уже припаяны, либо включены в комплект).
- Два входных разъёма для подключения аккумулятора к PDB (некоторые включают паяные разъёмы с пайкой, какие-то входят в комплект, а бывает вообще не входят).
*ESC обычно имеют встроенную цепь устранения батареи (или BEC), которая преобразует напряжение основной батареи в 5В для последующего питания приёмника и контроллера полёта. 5В обычно подаётся через RC разъём от ESC (обычно центральный/красный контакт). Вам потребуется только один BEC для питания контроллера полёта.
Если плата распределения питания использует разъёмы, которые не совпадают с разъёмами на ESC или АКБ, то вам нужно будет, либо приобрести переходники (адаптеры), либо приобрести новые разъёмы и заменить их на ESC или ПРП. Преимущество остаётся за платой распределения питания, разъёмы которой совпадают с разъёмами АКБ и ESC.
Если вы хотите запитать дополнительную слаботочную электронику (светодиодную систему освещения, подвесное устройство и т.д.), но на вашей плате распределения питания нет запасных соединений, вы можете использовать зарядный кабель аккумуляторной батареи.
Белый зарядный разъём обычно имеет один контакт для заземления и по одному контакту для каждой банки (1S, 2S, 3S и т.д.) используемой в сборке LiPo АКБ. Несмотря на то, что этот разъём действительно предназначен только для зарядки батареи, он может обеспечивать выходное напряжение равное 3.
- Удалите красный повод у каждого 3-контактного R/C разъёма регулятора скорости, за исключением одного. Рекомендуется это сделать таким образом, чтобы при необходимости вы всегда могли подключить их обратно. Замотайте конец каждого исключённого провода изолентой или используйте для изоляции термоусадочную трубку, чтобы в последствии они не смогли контактировать с другими элементами электроники. Тот единственный красный провод, что остался не тронутым, будет питать используемый в сборке полётный контроллер.
- Подключите два питающих провода каждого ESC к распределительной плате, убедившись, что красный провод подводится к плюсу ( ), а чёрный провод к минусу (-).
- Если используемая вами плата распределения питания имеет свои R/C разъёмы, то в данном случае решать вам, подключать R/C выводы каждого ESC к R/C разъёмам на этой плате или подключать их напрямую к полётному контроллеру.
- Подсоедините каждый из трёх разъёмов моторов к трём разъёмам регуляторов скорости (ESC). На данный момент порядок подключения этих разъёмов не важен (если повлияет на направление вращения, то будет исправлено по мере необходимости позднее).
Обратите внимание, что если вы решите на данном этапе убрать или скрыть проводку, позднее вам может потребоваться доступ к некоторым соединениям в соответствии с процедурой, описанной в 6 уроке, в частности, поменять местами соединения между ESC и мотором, чтобы двигатель вращался в противоположном направлении.
Настроим квадрокоптер своими руками.
- Жмем кнопку «Подключить». Вверху окна включаем режим эксперта. Переходим на вкладку «система», устанавливаем квадрокоптер на горизонтальную плоскость и нажимаем «Калибровать Акселерометр». Можете покрутить теперь квадрокоптер своими руками, и вы увидите как реагирует картинка на экране. На этой вкладке закончили.

- Идем на вкладку «порты». Делаем все как на картинке. Сохраняем и перезагружаем. Подключаем снова.

- Повторите все настройки, представленные на следующих нескольких картинках .Но не забывайте сохранять и перезагружать.




- На вкладке PID настройки оставьте значения по умолчанию. Квадрокоптер с ними ведет себя нормально. Впоследствии вы всегда можете углубиться в эту довольно сложную тему. На просторах рунета есть много статей про настройку PID регулятора.
- Теперь мы с вами подобрались к проверке корректности вращения моторов квадрокоптера.
 Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов.
Моторы уже могут вращаться. Но нужно убедиться в том, что они все крутятся в нужную нам сторону. Во-первых, снимите пропеллеры, если они установлены, или просто отвинтите фиксирующие гайки. И, вообще, желательно все настройки производить в таком состоянии. Установленные пропеллеры — это риск нанести себе травму! Во-вторых, подсоедините аккумулятор к квадрокоптеру. Дальше переходим на вкладку «Моторы» конфигуратора Betaflight. Теперь включаем ползунок под маркером 2 на картинке. В блоке под маркером 3 указано правильное направление вращение для каждого из моторов. - Переходим к блоку 4. Сначала плавно поднимаем ползунок возле мотора №1 и смотрим, куда он вращается. Если по часовой стрелке, тогда все хорошо, переводим ползунок вниз. Точно так же проверяем все оставшиеся моторы и выписываем те из них, которые вращаются в противоположную от нужной стороны. Выписали? Идем дальше.
Особенности выбора комплектующих
- Моторы. Китайские интернет-магазины обычно хитрят и завышают характеристики. Поэтому для надёжности стоит купить моторы мощнее. Также это даст возможность поднимать более тяжёлую камеру. Также существует две разновидности моторов для квадрокоптера — это коллекторные и бесколлекторные

- Пропеллеры. Их цена зависит от цели вашего коптера. Если в ваши планы не входят более сложные «полёты» — пластиковых пропеллеров будет достаточно. Если же планируете аэрофотосъёмку – придётся брать композитные материалы. Чем дороже пропеллеры, тем они крепче и меньше уйдёт времени на балансировку.

- Пульт, приёмник сигнала. Пульт следует брать вместе с приёмником. В таком случае приёмник будет принимать сигнал, посылаемый с пульта. Нормальные пульты, опять-таки, стоят от тысячи рублей и выше – у них радиус действия выше. Сами же пульты могут иметь кучу ненужных переключателей, которые будут вас путать – такие экземпляры лучше не брать.

- Регуляторы оборотов и батарея. Советуем брать сразу комплект двигателей с контроллерами. Можно обойтись и без этого, но тогда настраивать мощность придётся самим. Батарею следует покупать по мощнее, особенно, если хотите ставить более тяжёлую камеру.

- Контроллер. Контроллеры бывают двух типов. Универсальный удобен тем, что работает на дронах любой сборки, этому способствуют датчики и многофункциональность. Недостатком является цена контроллера – от 17 тысяч рублей. Также его придётся настраивать через специальный софт, написанный под конкретную модель. Специализированный контроллер уже имеет необходимые настройки под конкретный тип коптера.
- Камера. Выбор камеры для коптера – дело непростое. Советуем поставить камеру типа GoPro или аналоги от китайских фирм – их качество не сильно разнится. Главную роль играет вес и угол обзора, о последнем расскажем чуть ниже. Чем массивней камера, тем сложнее будет её от центровать. Вы можете рассчитать положение камеры по формуле L= 2 * tg (A /2) х D , (L – область обзора, A – угол, D – расстояние до пропеллеров).
Очки/шлем
Довольно много споров что лучше очки или шлем, каждый решает сам.
Идеальный вариант – перед покупкой попробовать и то и другое. У меня есть Fatshark Base (далеко не новые очки) и шлем Eachine VR D2. Я очкарик с близорукостью и небольшим астигматизмом; у фатшарков использовал линзы -2 диоптрии, все отлично видно.
После очков в шлеме было неудобно первые минут 10. Потом привык. Мои очки под шлем не лезут, но и без очков я никакого дискомфорта не испытываю.
Писать 1001-й обзор шлема думаю смысла нет, просто фото и краткое описание.

Основной плюс, особенно для новичков – комплект содержит все необходимое: сам шлем, антенны для приемников (два типа: клевер – всенаправленная антенна с круговой поляризацией, патч – направленная антенна с линейной поляризацией), аккумулятор, зарядник и даже салфетки для протирки. Ну разве что MicroSD карточку придется докупить, чтобы воспользоваться встроенным DVR.
Подробно можно прочитать
или
, там же есть и инструкция на русском языке.
Дополнительно:Сравнение разных шлемов/очковФорум. Мучительный выбор очков для фпв…Еще один обзор и сравнение недорогих шлемов для FPV
Подключение fpv камеры.
Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру.  Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Приёмник. полётный контроллер.
Предположим, что на этом уроке вы сделали выбор в пользу радиоуправления в качестве устройства ввода. Если вы хотите использовать WiFi, Bluetooth или другой способ ввода, пожалуйста, прочитайте инструкцию по контроллеру полёта и найдите последовательный ввод; в этом разделе будет описано, как/куда подключить устройство последовательного ввода к контроллеру полёта.
Ваш RC передатчик должен приходить в комплекте с соответствующим RC приёмником. Приёмник должен быть привязан к передатчику, чтобы вы могли удалить перемычку привязки с приёмника (если она есть). В комплект также может входить держатель АА батарейки, которая предназначена для питания приёмника, но мы не будем использовать её, поскольку BEC будет питать как приёмник, так и контроллер полёта.
В руководстве к контроллеру полёта будут указаны местоположения следующих контактов, которые должны быть согласованы и подключены к приёмнику:
- Throttle
- Pitch
- Yaw
- Roll
- Вспомогательные (Aux) переключатели 1, 2, 3 и т.д.
Теперь вы можете сделать следующие подключения:
- Прочитайте руководство к контроллеру полёта, чтобы увидеть, какой входной R/C контакт связан с какой из перечисленных выше функций.
- Прочтите руководство к передатчику, чтобы узнать, какой канал связан с каждой из функций.
- Некоторые RC передатчики могут быть перепрограммированы для изменения функций каждого контакта. Если вы решите изменить какой нибудь вход (джойстик или переключатель), делайте это лишь после того, как убедитесь, что знаете, какой канал на приёмнике соответствует какой функции. Throttle, Pitch, Yaw, и Roll всегда должны быть связаны с двумя стиками/джойстиками, а не с переключателями или кнопками.
- Подключите канал Throttle на приёмнике к входу Throttle на контроллере полёта.
- Подключите канал Pitch на приёмнике к входу Pitch на контроллере полёта.
- Подключите канал Yaw на приёмнике к входу Yaw на контроллере полёта.
- Подключите GND на контроллере полёта (обычно третий ряд контактов) к GND на приёмнике (обычно третий ряд контактов).
- Если будет использоваться вспомогательный вход, подключите Aux 1 на приёмнике к Aux 1 на контроллере полёта и так далее.
Вы можете использовать 3-контактные серво провода для каждого из каналов, но только один из каналов (может быть любым) должен иметь напряжение и заземление; остальным нужен только сигнальный провод. Все соединения могут иметь GND к GND, хотя требуется только одно.
Прошивка.
- Запускаем Betaflight Configurator (полетный контроллер пока не подключаем). На начальной странице видим список драйверов, которые необходимо установить. Устанавливаем все.

- Теперь можно обновить прошивку полетного контроллера. Закрываем Betaflight, зажимаем кнопочку boot на полетном контроллере и держим, снова запускаем Betaflight, отпускаем кнопочку boot.
 Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова.
Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова. - Далее, переходите на вкладку программатор.
- Из выпадающего списка выберите полетный контроллер Fury4OSD (DIAT) .
- В следующем выпадающем списке выберите последнюю стабильную версию прошивки.
- Нажмите на ползунок «полное стирание чипа».
- При подключенном интернете нажмите кнопку «Загрузить прошивку (Online)». Дождитесь загрузки прошивки. После этого кнопка «Загрузить прошивку» станет активной.

- Нажимаем кнопку «Загрузить прошивку» и дожидаемся окончания ее заливки в полетный контроллер (ПК). Всё.
- Отключаем ПК. Подсоединяем снова, но уже без зажатой кнопки boot. ПК должен мигать разноцветными светодиодами.
Размещение акб.
Батарея, используемая для питания, часто является самым тяжелым элементом на БПЛА и может составлять от 1/4 до 1/2 его общего веса. Поэтому, место её установки очень важно. Идеальное расположение основного аккумулятора должно быть в центре коптера, чтобы все двигатели могли выдерживать примерно одинаковую нагрузку.
Если аккумулятор расположен ближе к задней части коптера, задние моторы должны будут обеспечивать большую тягу, чем моторы спереди, и, соответственно, максимальная общая тяга будет ограничена (когда задние двигатели находятся на полной тяге, на моторах спереди тяги не будет).
Принимая во внимание, что обычный подход в мультироторной конструкции состоит в том, чтобы коптер был симметричен относительно центральной оси (или, по крайней мере, одной оси), поэтому батарею следует размещать вдоль этой центральной линии, а не смещать ее в одну или другую сторону.
Далее вам нужно будет решить, на какой высоте разместить аккумулятор. Есть несколько мест, где батарея может быть установлена:
- Под рамой (коптер будет тяжелым снизу, более стабильным и менее акробатичным).
- Прямо под моторами (обычно внутри рамы); возможно, одно из лучших мест.
- На той же высоте, что и двигатели или несущие винты (например, устанавливается в верхней части рамы).
- Над пропеллерами (БПЛА будет сверху тяжелым и более склонным к перевороту).
Для достижения наилучших лётных характеристик, в идеале АКБ должна быть расположена в положении 3, описанном выше. Положение 4 создает эффект перевернутого маятника, и, если БПЛА наклонится за пределы определенного угла, то дрон будет стремиться к перевороту.
Положение 1 создаст достаточно стабильную платформу, которая по своей природе склонна оставаться на одном уровне, но при этом крайне не годится для акробатики. Поэтому большинство разработчиков выбирают положение 2 и размещают аккумулятор либо непосредственно под рамой, либо внутри нее.
Разработка
Вдохновением для общей формы коптера послужила рама
. Мне понравилось расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Такая схема позволяет расположить камеру так, что пропеллеры не попадают в ее поле зрения. Также они придумали хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов.
Однако полностью под мои потребности Spidex не подходил. Во-первых, в нем использованы алюминиевые трубки, от которых я уже натерпелся — гнутся они, причем даже без аварий, просто от постоянной нагрузки. Во-вторых, я использую камеру GoPro Hero HD2, одолженную на неопределенный срок у сожителя — я нe готов монтировать ее на коптер без защитного корпуса, а Spidex этого не предусматривает.
Короче говоря, от Spidex я решил использовать только общую компоновку. Раму я решил собирать самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с зажимами. У знакомого дома стоит фрезерный станок, на котором можно вырезать пластины необходимой формы. Чтобы создать эту самую форму, я засел за LibreCAD, и вот что у меня получилось:
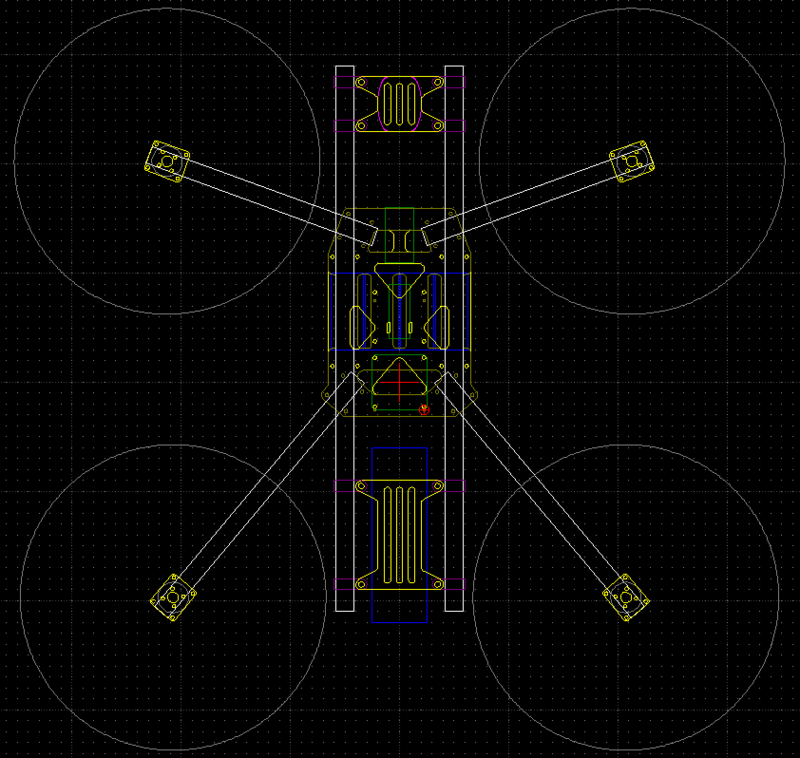
Общий вид коптера сверху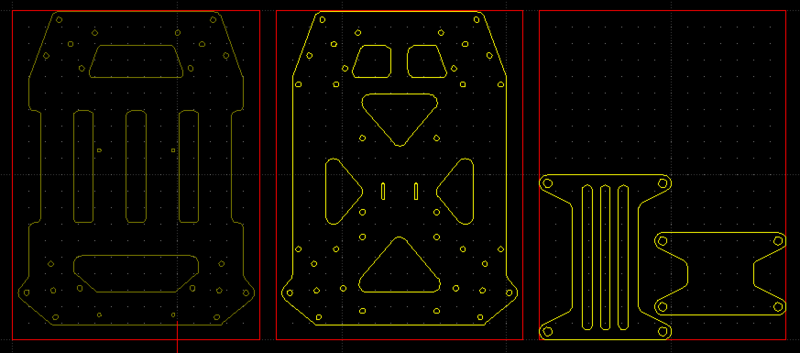
Центральные пластины и держатели камеры и аккумулятора
Удовлетворившись данным результатом, я передал чертежи знакомому, и заказал всe необходимые детали в местных (немецких) онлайн-магазинах. В частности, были куплены карбоновыe трубки (16×14мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой мелочевки.
Всю электронику я решил использовать с предыдущего коптера. Два квада мнe ни к чему, все прекрасно работает — зачем покупать новые детали? Список той самой электроники и других деталей, перекочевавших с предыдущей модели:
Сборка
Через несколько дней все детали были на месте, и можно было приступать к сборке.
Детали разложены на столе, сборка начинается. Порядок долго не продержался…

Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилятся из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо.

Примеряем зажимы к нижнему центру.

Центр собран для проверки, все ли стыкуется как надо. Вроде да.

Прикрутил все остальные части рамы. Похоже, что почти готово? Как бы не так.

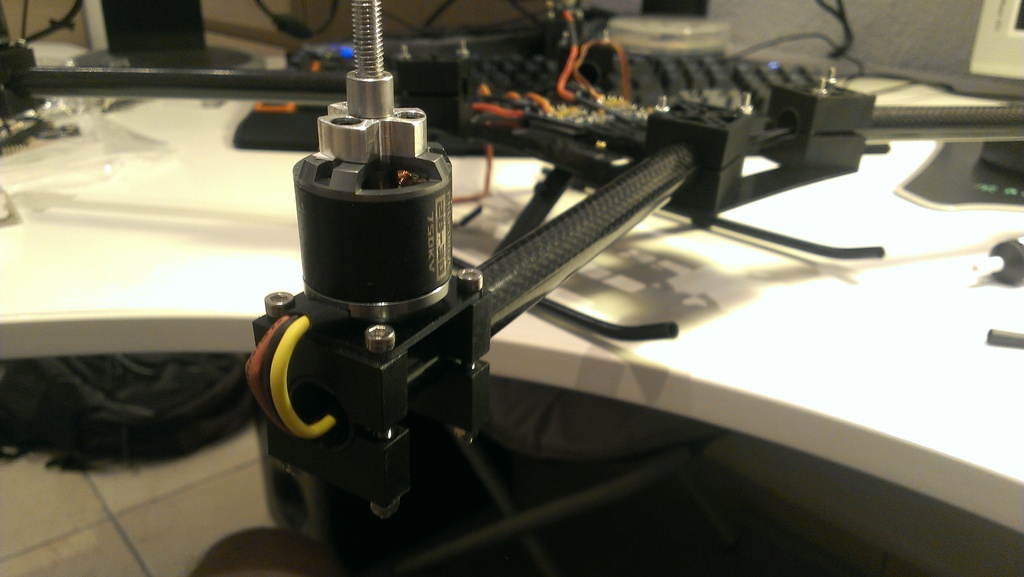
Оси моторов нужно обрезать — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь…

… и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки нe забыть.

Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода.
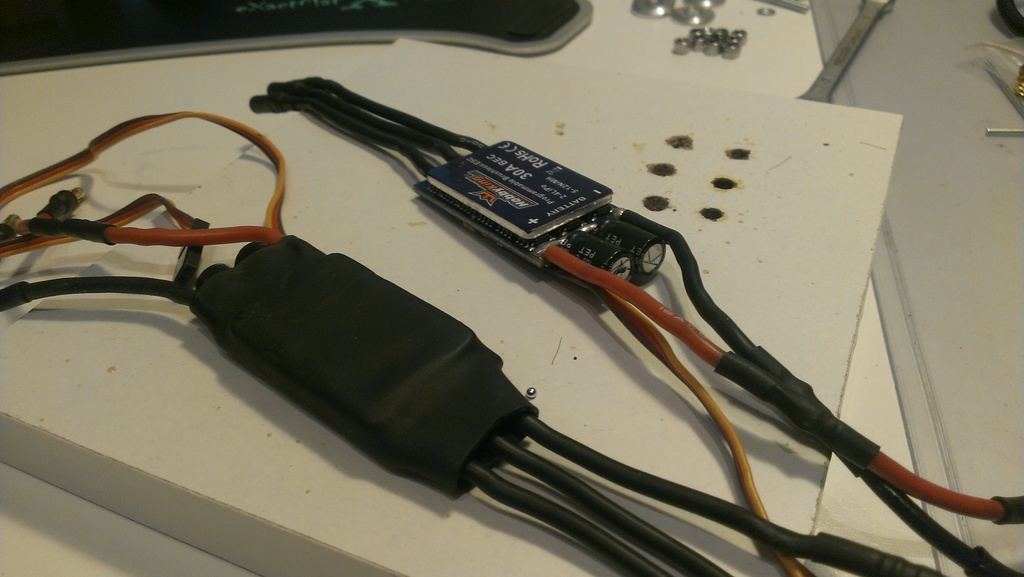
Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо дофига — и это всeго лишь квад.

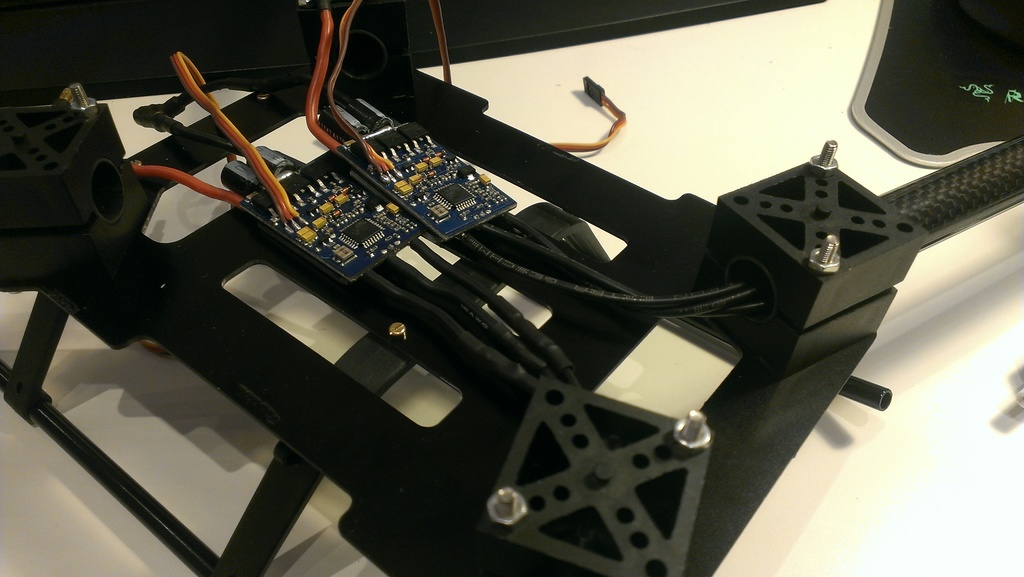
Размещаем контроллеры на нижней полураме.
Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано!
Изолируем контроллеры новой термоусадкой, когда все кабеля на месте.

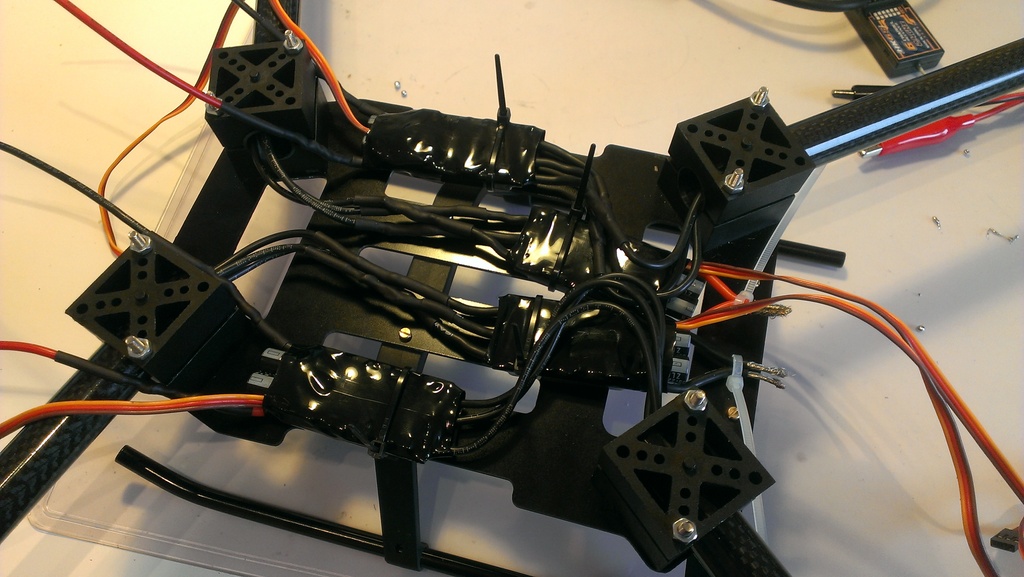
Устанавливаем контроллеры моторов на их окончательную позицию. Проводов многовато, но достаточно чисто.
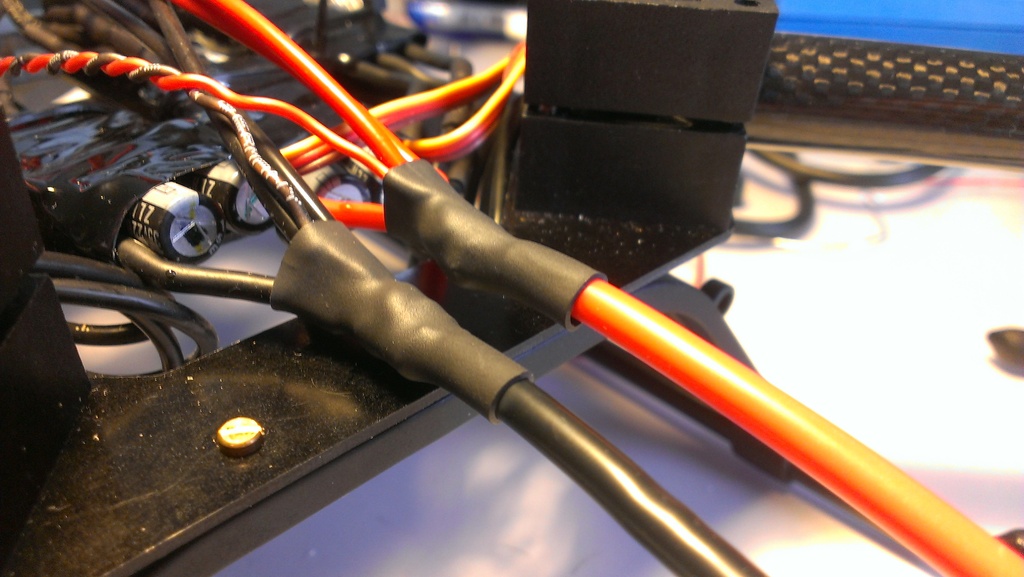
Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком…
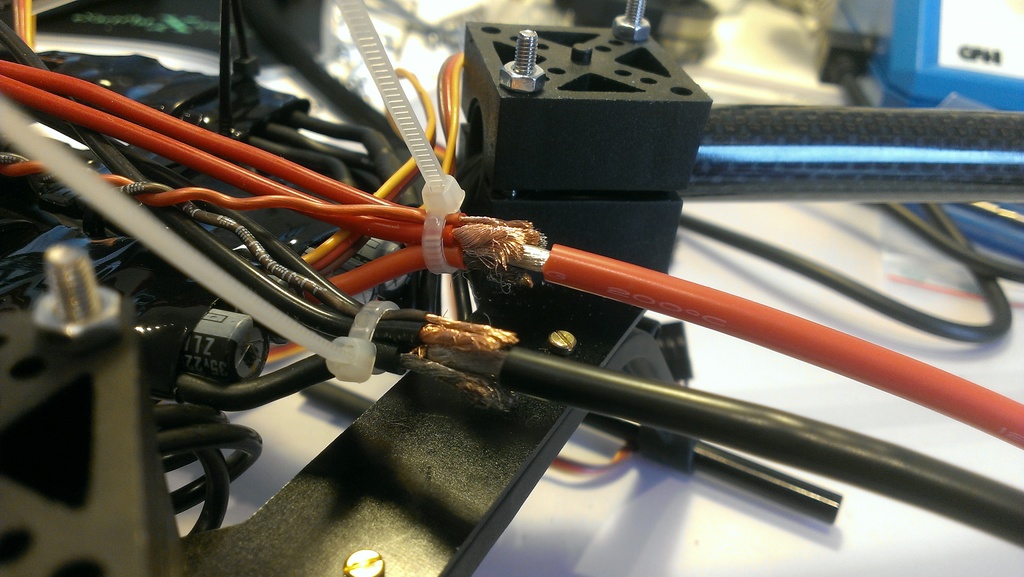
… стягиваем тонкой медной проволокой…
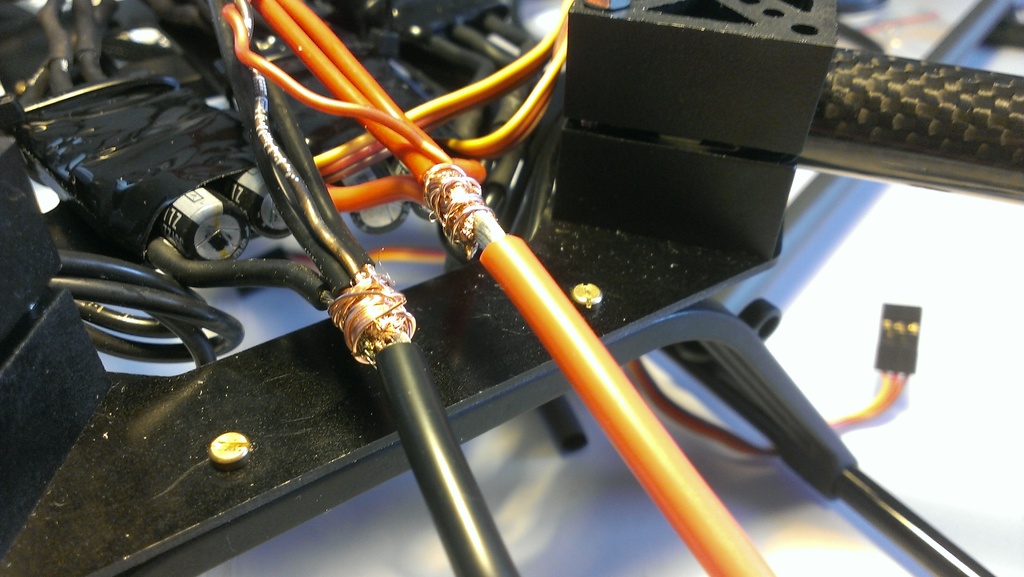
… спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее.
Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху.

Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором.
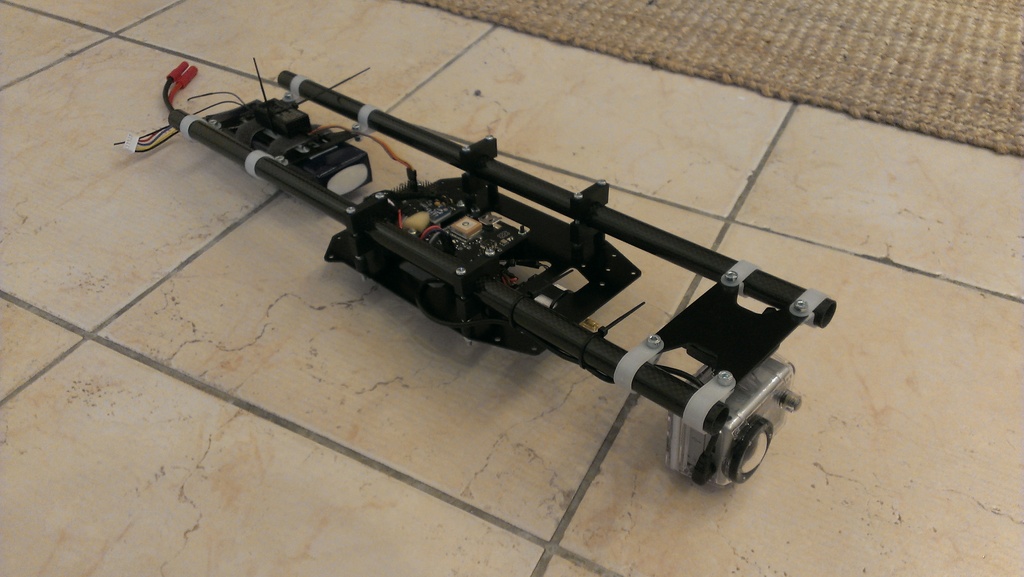
Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик.
Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки.

Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода…

… готово!
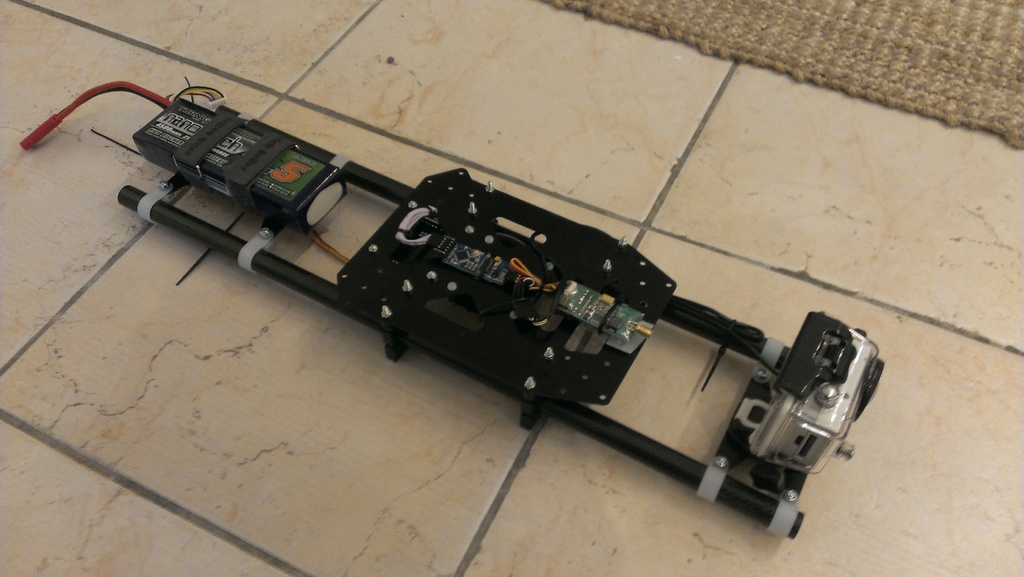
Результат сборки:
Вот такой коптер получился. Единственное, чем я недоволен — это вес. Облегчить конструкцию не удалось, за счет зажимов для трубок и огромного количества винтов с гайками общий вес поднялся до 1950 грамм. Однако это еще вполне в рамках мощности привода — мои сомнения были полностью развеяны во время первого полета.
Этапы сборки квадрокоптера
Раскладываем всё это добро по столу и приступаем.
- Приблизительно прикидываем нужную длину проводов контроллера, добавляем небольшой запас на всякий случай, и обрезаем их до необходимой длины.
- Коннекторы припаиваем к выходам регуляторов для упрощения подключения моторов.
- Припаиваем регуляторы оборотов к плате разводки.
- Припаиваем коннектор АКБ тоже к плате разводки.
- Аккуратно прикручиваем моторы на лучи дрона. При установке бережём резьбу.
- Припаиваем коннекторы двигателей, если их нет.
- Прикручиваем лучи с моторами к плате.
- Крепим регуляторы к лучам коптера. Удобней всего это делать пластмассовыми хомутами.
- Включаем провода регуляторов к движкам в случайном порядке. Если понадобится, потом изменим порядок.
- Закрепляем на корпусе модуль управления (предварительно сфотографировав тыльную сторону, потом поймёте, для чего). Крепим хоть на жвачку, но рекомендую для начала применить мягкую двухстороннюю липкую ленту.
- Подключаем регуляторы оборотов к контроллеру. В порты, отмеченные знаками «плюс»-«минус»-«пусто», как правило, подключаем белым проводом к экрану.
- Оставшейся липкой лентой закрепляем приёмник поближе к блоку управления, и подключаем необходимые каналы к соответствующим портам. Применяем документацию данного приёмника и снимок внешнего края платы, дабы понять, какая стопка проводов за что отвечает.
- Подключаем питание прибора от батареи, сквозь коннектор.
- Вы молодец! Вы собрали свой первый дрон.





 купить по привлекательной цене 46990 руб. в Москве")