

- Характеристики видеопередатчика, как выбрать и на что следует обращать внимание
- Как проверить, требуется ли делать реверс основных каналов в аппаратуре?
- Aux каналы.
- Fpv quadcopter wifi camera controller на алиэкспресс — купить онлайн по выгодной цене
- Pit mode (режим)
- Встроенный микрофон
- Выходная мощность
- Где используются частоты 1.3mhz, 900mhz и 433mhz?
- Изменение направления вращения моторов квадрокоптера.
- Как подключить видеопередатчик для квадрокоптера к fpv камере
- Как подключить приемник flysky или другой аналог по протоколу i-bus к полетному контроллеру omnibus f4 pro v3?
- Как установить регуляторы оборотов на квадрокоптер с gps?
- Квадрокоптер с gps своими руками. подробная инструкция по сборке. часть 1 – сборка.
- Корпус
- Краткий обзор комплектующих.
- Механизм переключения каналов
- Напряжение
- Настройка osd
- Настройка квадрокоптера с gps (inav).
- Настройка квадрокоптера с gps на пк omnibus.
- Настройка радиоаппаратуры flysky.
- Настройки failsafe. квадрокоптер своими руками.
- Окончательная сборка квадрокоптера.
- Отдельно про permanently enable airmode.
- Пайка проводов питания квадрокоптера.
- Поддержка каналов
- Подключение fpv системы квадрокоптера.
- Подключение видеопередатчика.
- Постройка diy квадрокоптера. часть 1 теория
- Прошивка и настройка самодельного квадрокоптера.
- Прошивка полетного контроллера квадрокоптера с gps (inav).
- Прошивка.
- Размер и вес
- Разъем для антенны
- Сборка рамы.
- Собираем квадрокоптер своими руками (fpv). frogii mamba f405
- Совместимость
- Схема подключения периферии к полетному контроллеру omnibus f4 pro v3.
- Установка fpv и телеметрии на квадрокоптер
- Установка fpv камеры.
- Установка led подсветки на квадрокоптер.
- Установка и подключение gps модуля и компаса на квадрокоптер.
- Установка моторов на раму.
- Форм-фактор. размер
Характеристики видеопередатчика, как выбрать и на что следует обращать внимание
Любой электронный компонент обладает рядом технических характеристик, на которые следует обращать внимание при выборе, это относится и к видеопередатчикам.
Далее мы рассмотрим 13 пунктов, которые учитывается при выборе этого важного компонента FPV системы квадрокоптера.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре?
Подключаем ПК к компьютеру, запускаем Betaflight, подсоединяем аккумулятор. Заходим на вкладку “Приемник”. Двигаем стиками на аппаратуре и наблюдаем, как ведет себя изображение квадрокоптера на экране при повороте стиков в ту или иную стороны. Например, при повороте стика Yaw вправо, квадрокоптер должен вращаться вправо, и, наоборот.
Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
Aux каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных.
Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Теперь идем в Betaflight и делаем все точно также, как указано на картинке (чтобы ползунки стали активными нужно нажать на кнопку “Добавить диапазон” и выбрать соответствующий канал AUX). 
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние – Disarm (моторы остановлены), вторая позиция – Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция – Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Fpv quadcopter wifi camera controller на алиэкспресс — купить онлайн по выгодной цене
Перед покупкой сравните цены на fpv quadcopter wifi camera controller, прочитайте реальные отзывы покупателей, ознакомьтесь с техническими характеристиками.
Закажите fpv quadcopter wifi camera controller онлайн с доставкой по России: товары с пометкой Plus доступны с ускоренной доставкой и улучшенными условиями возврата.
На Алиэкспресс fpv quadcopter wifi camera controller всегда в наличии в большом ассортименте: на площадке представлены как надежные мировые бренды, так и перспективные молодые.
Pit mode (режим)
Используется в основном на соревнованиях. При активации мощность видеопередатчика снижается до 0.5mW, с целью поменять канал и не мешать своим эфиром другим пилотам. Очень нужна функция. Вам придется держать очки или шлем близко к квадркоптеру. После смены канала, PIT режим отключается и мощность восстанавливается.
Встроенный микрофон
На многих видеопередатчиках стали устанавливать микрофоны, они используются для того, чтобы слышать звук работы двигателей. Профессиональные пилоты говорят, что это помогает лучше контролировать квадрокоптер.
Для любителей и начинающих не считаю нужным тратить лишние деньги на микрофон.
Выходная мощность
Выходная мощность — это определение, сколько энергии излучает видеопередатчик в процессе работы. Большая мощность означает бОльшую дальность, но сопровождается «побочными эффектами» — создаются помехи другим пилотам, который будут летать с вами.
Большинство видеопередатчиков имеют мощность:
25mW — это идеальная мощность для полетов в помещении и для гонок. При хорошей настройке и правильной установке антенны, такая мощность будет достаточной для полетов на любой гоночной трассе FPV.
200mW — это золотая середина. На этой мощности значительно увеличивается дальность полета и вы сможете высоко взлетать и отлетать на значительные расстояния.
400mW — Довольно большая мощность, используется для дальних полетов.
600mW — это уже слишком много и создает помехи другим устройствам, не рекомендуется использовать такую мощность.
Все современные видеопередатчики имеют возможность регулировать выходную мощность сигнала, это позволяет удобно использовать дрон в помещении, выставив ему мощность в 25mW и на улице на дальние дистанции на 200 или 400mW. Стоит учитывать, что чем выше мощность, тем быстрее разряжается аккумулятор, так как возрастает электропотребление.
Читатели нашего сайта со всего мира, поэтому есть один нюанс насчет мощности видеопередатчиков — в Европе запрещено использовать мощность более 25mW, а в России как таковых надзорных органов нет, за исключением полетов около аэропортов и режимных объектов. В США требуется получить лицензию HAM.
Где используются частоты 1.3mhz, 900mhz и 433mhz?
Такие частоты используются для использования квадрокоптеров и самолетов дальнего радиуса действия и используются специальные устройства, например, TBS Crossfire. Благодаря использованию низких частот, значительно увеличивается диапазон, так как сигнал с длинными волнами хорошо проходит через препятствия, такие как деревья, постройки и так далее.
Видео, которое передается по такой частоте, значительно хуже по качестве, чем более в более высоких частота — это обусловленно тем, что такая частота несет в себе меньше данных.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.

- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация

- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Как подключить видеопередатчик для квадрокоптера к fpv камере
В комплекте с камерой и видеопередатчиком всегда будут провода со специальными штекерами. Но есть важный момент, передатчик обычно ставят в задней части дрона, а значит нужно протянуть провода от камеры до него, но если вы не знали, то видеосигнал создает помехи полетному контроллеру и наоборот. Поэтому провода от камеры нужно скрутить спиралью и прикрепить к корпусу хомутами параллельно полетному контроллеру, вот такой схемой:
Такая схема позволит минимизировать появления помех от работы контроллера и передатчика.
Если же ваш видеопередатчик квадратного форм-фактора, то достаточно будет просто скрутить провода спиралью.
Как подключить приемник flysky или другой аналог по протоколу i-bus к полетному контроллеру omnibus f4 pro v3?
Подключить приемник к контроллеру OMNIBUS по протоколу I-bus, например, Flysky FS-IA6b было бы очень просто, если бы у вас был набор коннекторов. Я же вам покажу как подключить приемник Flysky к Omnibus тремя проводами. Смотрите фото и схему (wiring diagram) внизу статьи. Я долго думал, отпаивать коннектор или нет. В итоге пришел к выводу, что проще всего припаять провод к контактам в задней части коннекторов. 

Как установить регуляторы оборотов на квадрокоптер с gps?
Регуляторы оборотов с одной стороны имеют 3 контактные площадки для соединения моторов, а с другой стороны толстые провода (красный и черный) для пайки к плате распределения питания, тонкие для пайки к полетному контроллеру. Обрезаем излишки проводов, идущих от моторов предварительно приложив регуляторы к лучам рамы, зачищаем их и лудим, лудим контактные площадки на регуляторах и припаиваем 3 провода от моторов в любом порядке. Силовые провода питания регуляторов припаиваем к плате распределения питания, также отрезав излишки проводов. Тонкие провода пока не трогаем. Можно зафиксировать платы изолентой или стяжками. Не обращайте внимания на припаянный коннектор XT-60, я его припаял здесь для одного личного эксперимента. К питанию квадрокоптера мы вернемся чуть позже. В общем, должно получиться примерно так.
Квадрокоптер с gps своими руками. подробная инструкция по сборке. часть 1 – сборка.
Давайте продолжим тему сборок квадрокоптеров своими руками. В прошлый раз я построил шустрый гоночный квадрокоптер. В этот раз построим бюджетный квадрокоптер, на борту которого будет барометр для вычисления высоты и датчик GPS с компасом для реализации различных функций, таких как автоматический возврат домой, полеты по точкам, удержание высоты и позиции. Но теперь дрон будет на прошивке INAV.
Сразу перечислю все комплектующие, использованные в проекте (Все ссылки ведут на алиэкспресс. Переходя по ссылкам Вы поддерживаете проект! Спасибо Вам за это!):
Полетный контроллер – дешевый клон очень
https://www.youtube.com/watch?v=b1IVwGmGs4Y
распространенного ПК Omnibus F4 V3 Pro. Имеет на борту 3 UART, возможность подключения приемника по SBUS и IBUS, разъем для подключения GPS модуля, барометр и слот карты памяти для записи параметров полета.
Рама для квадрокоптера. Не менее распространенная Martian II в размере 250 мм. Бюджетная, достаточно прочная и очень вместительная.
Позволяет установить по желанию как 5-ти дюймовые, так и 6-ти дюймовые пропеллеры.
Моторы я выбрал бюджетные Readytosky RS 2205 2300kv. Регуляторы оборотов – Little Bee 30А.
Регуляторы оборотов – Little Bee 30А. Регуляторы оборотов – Little Bee 30А.
Регуляторы оборотов – Little Bee 30А.Курсовая камера – Foxeer Monster Pro.
 Видеопередатчик– AKK K33 5,8 GHz.
Видеопередатчик– AKK K33 5,8 GHz. Видеопередатчик– AKK K33 5,8 GHz.
Видеопередатчик– AKK K33 5,8 GHz.GPS модуль – BN-880 с компасом.

Приемник – модернизированный Flysky fs-ia6b (14-канальный с RSSI). Купить можно здесь.
Корпус
Большинство видеопередатчиков просто обтянуты термоусадкой и ничем не защищены, потому что обычно расположены внутри корпуса рамы. Если вам нужна дополнительная защита, то продаются видеопередатчики в алюминиевом или пластиковом корпусах, но они тяжелее.
Краткий обзор комплектующих.
Рама – Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы – Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
FPV камера – Foxeer Predator 4
Видеопередатчик – Foxeer Clear/ClearTX2
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Ну вот, все основное перечислил, теперь переходим к описанию сборки квадрокоптера. Вперед!!!
Механизм переключения каналов
Есть 4 механизма переключения между каналов:
- DIP (механическая крутилка);
- Кнопка с дисплеем;
- Инфракрасным пультом;
- Через OSD.
DIP уже устарел и используется только в старых видеопередатчиках.
Кнопка с дисплеем — сейчас самый популярный вариант, просто нажимаете в определенном порядке кнопку и на дисплее будет меняться канал, например, 2-B, 3-A и так далее. Нельзя использовать на соревнованиях, так как идет перебор всех каналов и вы можете перехватить канал другого пилота или он ваш канал.
Инфракрасный пульт — очень удобная штука и используется на соревнованиях, так как можно выбрать сразу нужный канал, без перебора.
OSD (SmartAudio, Tramp Telemetry) — канал тоже выбирается сразу без необходимости перебора. Выбор производится через меню на дисплее очков или шлема. Функция крутая и набирает популярность.
Напряжение
Некоторые видеопередатчики требуют определенный диапазон напряжения, поэтому при выборе учитывайте этот параметр. Например, многие видеопередатчики имеют большой диапазон входного напряжения — от 7 до 24V, поэтому можно не беспокоиться и использовать в качестве источника питания прямое соединение к аккумулятору LiPo 2-6S.
На плате разводки питания есть контакты с 5V, но на 5V работать видеопередатчик FPV не будет, так как это очень ресурсоемкий компонент, требующий большого напряжения.
Для микро-квадрокоптеров продаются специальные видеопередатчики с низким напряжением, менее 7V.
Настройка osd
На этой вкладке мы долго задерживаться не будем, так как, настройка OSD – это личные предпочтения каждого пилота. 
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
Настройка квадрокоптера с gps (inav).
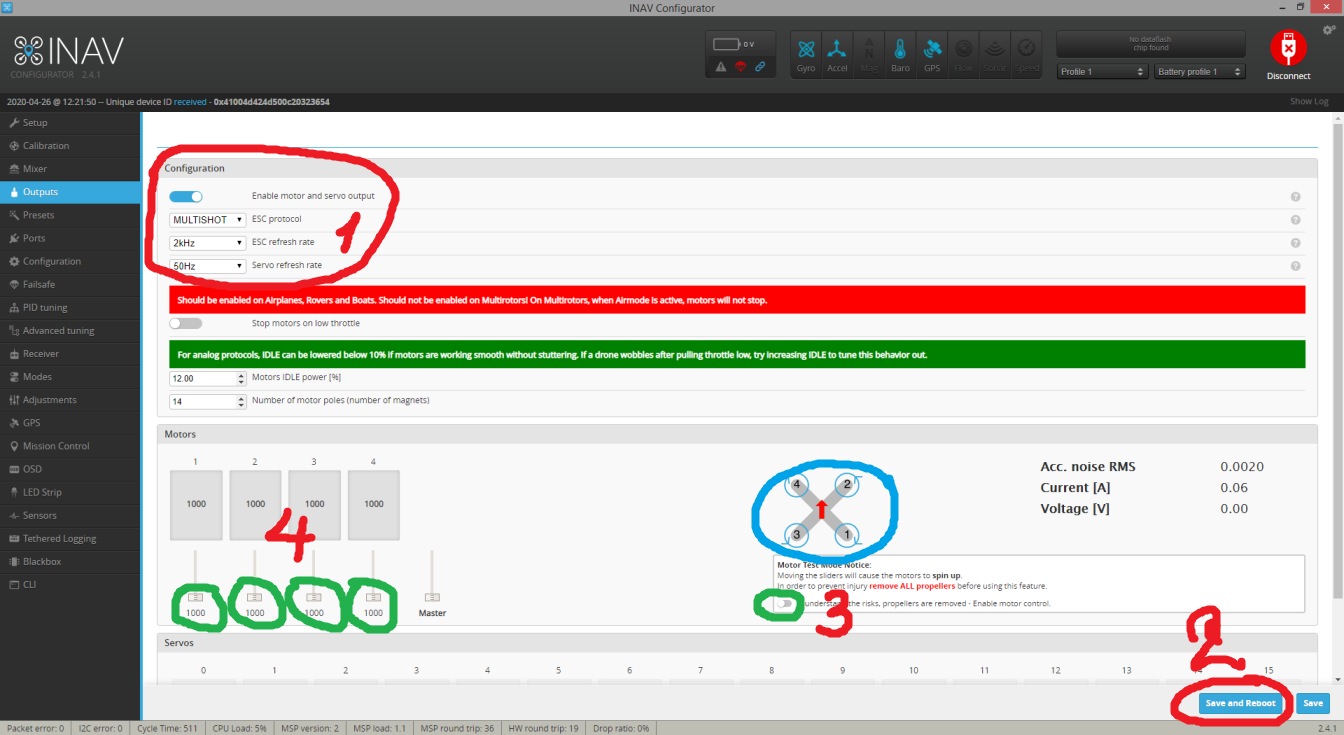
Далее я опишу Вам самые основные настройки квадрокоптера (в основном скриншоты), которых будет достаточно для того, чтобы он без проблем полетел. На некоторых заострю ваше внимание. Чтобы наиболее полно изучить все настройки INAV рекомендую обратиться к документации на GitHub.
Ну вот мы прошили квадрокоптер, подключили к INAV Configurator. Первая вкладка, которую мы увидим – Setup и на ней будут видны два красных крестика, говорящие нам о том, что нужно откалибровать акселерометр и, в дальнейшем, компас.
Вообще блок Pre-arming checks на этой вкладке показывает все ли в порядке с подключениями и настройками. Если по какой-либо причине после всех настроек у вас квадрокоптер не будет Arm, то идите на эту вкладку и выясняйте причины.
Идем на вкладку Configuration и выбираем AUTO там, где указано. Здесь и далее после каждой операции не забываем сохранять и перезагружать.

Если вы все сделали правильно, то на вкладке Setup в блоке Pre-arming checks все будет зелёное.
Вкладка порты (инициализируем IBUS и GPS модуль).

к этой статье. В ней подробно описано как изменить направление вращения мотора в BLHeli Configurator.
 MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать. MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
Настройка квадрокоптера с gps на пк omnibus.
Приступаем к завершению сборки квадрокоптера с GPS своими руками. Начало смотрите здесь.
Настройка радиоаппаратуры flysky.
Настройка радиоаппаратуры сводится к трем моментам. Во-первых, это реверс основных каналов (Roll, Pitch, Yaw, Throttle). Но только если потребуется. Запомните немаловажную информацию: в аппаратуре Flysky I6 сохранение любых измененных настроек происходит не кнопочкой “Ok”, а длительным нажатием кнопки CANCEL!!!
Запомните немаловажную информацию: в аппаратуре Flysky I6 сохранение любых измененных настроек происходит не кнопочкой “Ok”, а длительным нажатием кнопки CANCEL!!!
Настройки failsafe. квадрокоптер своими руками.
Failsafe – это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):
На стороне полетного контроллера делаем точно так же, как на картинке: 
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.
- Воспользуйтесь изолентой или стяжками для того, чтобы провода, идущие к моторам, были зафиксированы на лучах.
- Соберите “башню” квадрокоптера и установите в нее камеру. В комплекте к камере есть все крепления.
- Облегченный приемник радиоаппаратуры устанавливаем на стяжки под “башню”, видеопередатчик на нее, или все наоборот. Возможно, у вас получится лучше скомпоновать их. Можно творчески подойти к этому моменту.
- Устанавливаем полетный контроллер на стойки в соответствии с направлением стрелки. Соединяем шлейфом ПК и регулятор оборотов 4 в 1.
- Устанавливаем “башню” на раму. На первое время прикрутите ее винтами без фиксатора резьбы. После того, как мы убедимся, что квадрокоптер своими руками полностью работоспособен, можно будет перекрутить их с фиксатором.
- Антенны радиоаппаратуры крепите вдоль передних двух лучей. Многие FPVшники мне сейчас плюнут в лицо, но я не заметил каких то проблем с радиосвязью аппаратуры до 300-400 метров. Ведь мы с вами используем бюджетную аппаратуру Flysky и ждать от нее большего не имеет смысла.
- Прикрепите buzzer (пищалку) к лучу, но оставьте отверстие в нем открытым и снимите наклейку. Всё.
Отдельно про permanently enable airmode.
Хочу предостеречь вас от включения опции Permanently enable AIRMODE пока вы тестируете и настраиваете квадрокоптер дома. Эта опция, при установленных пропеллерах, может хорошенько потрепать вам нервы и даже испортить здоровье.
Если вдруг вы решите придержать руками квадрокоптер с включенной опцией при первых испытаниях, то столкнетесь с тем, что квадрокоптер бесконтрольно будет наращивать обороты моторов. Вплоть до максимальных значений, независимо от положения стика газа.
Обычно люди сразу думают, что это неполадки с полетным контроллером или передатчиком. Но на самом деле так работает эта функция. Пока квадрокоптер не сдвинется хотя бы на миллиметр для стабилизации, полетный контроллер будет увеличивать обороты. Имейте это ввиду. В поле можете включить ее снова.
Если вы сделали все вышеописанное, то настраиваете FailSafe, OSD и полетные режимы на свое усмотрение.
Часто случается, что клоны Omnibus показывают непонятные иероглифы в OSD. Попробуйте поменять шрифт, мне помогло.
Удачных полетов!
Пайка проводов питания квадрокоптера.
Питание контроллера OMNIBUS имеет некоторые особенности подключения. Чтобы понять принцип подключения силовых проводов, посмотрите фото ниже и полную схему подключения внизу статьи. Такое подключение необходимо, чтобы корректно работал датчик тока на контроллере.

Поддержка каналов
Все современные видеопередатчики поддерживают каналы, обычно их 40.
Что такое канал видеопередатчика? Это часть одной и той же частоты, но поделенная на равные промежутки этой частоты, чтобы была возможность использовать их другим пилотам, в итоге на гонках могут летать сразу 40 и более пилотов, при этом, каждый будет использовать частоту 5.8G, но у каждого будет свой «кусок» сигнала. Канал в большинстве видеопередатчиков отображается на маленьком экране.
Подключение fpv системы квадрокоптера.
Во-первых, удостоверьтесь в том, что питание в 14,0-16,8 вольт (4-х баночный аккумулятор) подходит для вашей камеры и видеопередатчика.
Во-вторых, нужно спаять перемычку между контактом RAM на плате и контактом VCC (см. п.2 на схеме подключения электроники). Таким образом, мы подадим напряжение аккумулятора на все контакты, обозначенные символами RAM на плате контроллера.
Если же вам понадобиться напряжение 5 вольт на контактах RAM, то их нужно спаять каплей олова с контактом 5V. Вот как выглядит перемычка.




Подключение видеопередатчика.
Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов. 
Красный – плюс питания передатчика, черный – минус питания, зеленый – SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый – вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны.
Едем дальше…
Постройка diy квадрокоптера. часть 1 теория
Решили собрать квадрокоптер? Для вас это темная чаща? Не знаете за что взяться? Статья именно для вас. Составлена на личном опыте.
Часть 2
Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр.
Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью.
Принцип полёта
Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер: маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450 золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550 и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок.
Своё повествование я продолжу опираясь на коптер 450 масштаба.
Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.
Цена их соответствующая…высокая.
Есть множество клонов, его я и выбрал.
gearbest.com/rc-parts/pp_88914.html
Настало время выяснить,что же такое квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера
• Передатчик
• OSD
b) Подвес для бортовой камеры
c) Подсветка
Теперь можно все детально рассмотреть.
1) С рамой уже определились. 450 масштаб, клон TBS.
2) Приёмник/Передатчик. Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать.
Самые популярные варианты:
1,5-2км обеспечит 2,4Ггц
433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км)
Для себя выбрал 2,4Ггц FlySky Th9x 9каналов
Ссылка
Не дорогая и простая в настройке аппаратура.
Для квадрокоптера необходимо от 5 каналов.
Выбор данной аппаратуры обусловлен её популярностью, давностью на рынке.Существует множество клонов.Ведётся много споров по поводу того, какая фирма была первой, это та же тургига 9, авионикс и другие… В интернете множество настроек.
3) Контроллер полёта
На данный момент очень много контроллеров полёта для квадрокоптеров. Свой выбор я сделал. Это Naza Lite c GPS
www.banggood.com/ru/DJI-NAZA-Flight-Control-System-and-GPS-Lite-Version-p-906572.html
Не очень дорого и сердито. Наза требует минимальной настройки и сделать это очень просто.
С контроллерами AIOP, Crius и MultiWii будет много раз сложнее и особенно новичку.
Почему я взял контроллер с GPS?
Данная функция необходима для зависания в точке и возврата домой.
Я вижу это очень удобным функционалом.
4) Силовая установка
Вызывает множество вопросов у непосвященных.
Используются БК моторы. Они являются трёх фазными(3 провода), их КПД около 90%.
Для управления скоростью вращения таким мотором используется регулятор оборотов(регуль), который получает команды от контроллера полёта.
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг )
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание: сравнивать моторы с разным kv можно при условиях одного типоразмера. Например, EMAX XA 2212 существуют в разных конфигурациях:
820
980
1400
Их можно сравнить.
Эффективность мотора с 1400kv будет максимальной при использовании пропеллера 8040,
А мотора с 820kv — при пропеллере 1147.
Максимум крутящего момента будет у мотора с 820kv, поэтому целесообразно использовать большие пропеллеры. А мотор с 1400kv будет любить высокие обороты при меньшей нагрузке.
Разница между представленными моторами в обмотке.
Разумно их использовать так:
1400kv на раме 330 и пропеллерами 8040
980kv на раме 450 и пропеллерами 1045
820kv на раме 500-550 и пропеллерами 1147
Я выбрал gearbest.com/rc-quadcopters-parts/pp_154973.html
И пропеллеры gearbest.com/rc-parts/pp_109432.html
Замечательный набор.
Схема подключения
Для простоты: Сигнальный- черный, Силовой( -) — красный
5) Аккумулятор
Выбирая аккум необходимо подобрать токоотдачу. Это число С.(25С,35С)
Не забываем что, по нашим данным система кушает 48А.
Допустим что, есть аккум 3300mAh 3S 35C Lipo Pack
3300 mAh — ёмкость аккума
3S – число банок(одна банка 3,7v)
35C – токоотдача. Т.е. Аккум ёмкостью 3.3Ah(3300 mAh) х 35C = 115А
Что достаточно покрывает наше энергопотребление. Даже излишне. Чем больше С, тем тяжелее и дороже аккум.
Посмотрим сможет ли аккум такой же ёмкости, но с токоотдачей 25С справится с нашими задачами или нет: 3.3Ah(3300 mAh) х 25C = 82А
Ответ:да.
Такой аккум будет легче и дешевле.
Для контроля состояния батареи можно купить такую штуку.
gearbest.com/rc-quadcopters-parts/pp_137605.html
Для зарядки аккумов очень популярна Imax B6, будьте осторожны, очень много подделок.
gearbest.com/rc-parts/pp_27704.html
И не забывайте с LiPo надо очень осторожно обращаться.
Мой совет: берите не меньше пары аккумов.
6) Доп. Оборудование.
• Когда вы определились с дальностью полёт и выбрали систему управления, можно начинать выбор FPV системы:
FPV- дословно: вид от первого лица в реальном времени.
2,4Ггц совместима с 5,8Ггц
433Мгц совместима с 1,2 Ггц
Иначе будут создаваться совместные помехи.
Для своей 2.4Ггц я подобрал 5,8Ггц 200mw
gearbest.com/rc-parts/pp_27971.html
FPV-система стостоит из:
1) Курсовой камеры
2) Передатчика на квадрике
3) Приёмной станции на земле.
Для Увеличения дальности связи можно заменить стандартные антены на ”клеверы”
gearbest.com/rc-parts/pp_69370.html
Большая часть передатчиков питается в пределах 9-12v, небольшая 3S батарея сможет запитать передатчик и камеру, которая выбирается для данного вольтажа.
Что значит 200mw?
Это мощность передатчика. Она непосредственно влияет на дальность связи. На открытой местности с нештатными антенами сигнал можно получать на расстоянии до 1 км.
С учетом того, что моя система управления на расстояние больше 1,5-2км не способна, это идеальный
вариант для моих потребностей.
С выбором приёмника и передатчика теперь все понятно, а как выбрать камеру, их огромное колличество?
Выбор камеры первоначально упирается в денежные средства.
Есть камеры которые имеют функцию потоковой передачи данных и одновременной записи.Стоимость таких камер значительно выше. Очень популярной является камера мобиус.
gearbest.com/car-dvr/pp_145224.html
Появился её конкурент, тоже имеющий AV выход
gearbest.com/action-cameras/pp_143378.html
Можно использовать курсовую камеру из самых дешовых, без корпуса. Стоимость которой колеблется от 600 до 1000рублей, а записывать с помощью хорошей экшен камеры на подвесе.
У FPV камеры мы увидим число ТВЛ. Что это такое? Это число строк развертки. Для FPV камеры будет достаточно 500-700ТВЛ. Важное значение имеет уровень минимальной освещенности, данный параметр измеряется в люксах. 0.01 люкс достаточно для полётов даже вечером. Угол обзора имеет не менее важное значение. 100-120 градусов это идеально. Не плохо бы иметь автоматическую коррекцию засветов и авто. баланс белого.
Картинку можно вывести на такой монитор
gearbest.com/rc-parts/pp_117460.html
• Можно прикупить 2х- или 3х-осевой подвес для камеры. Такая штука позволяет поворачивать камеру и иметь более стабильную картинку, без рывков и дерганий.
Штука достаточно дорогая.
У меня вот такой: gearbest.com/rc-parts/pp_110479.html
• Естественно сама бортовая камера gearbest.com/action-cameras/pp_77094.html
• Можно установить LED подсветку, пищалку,GPS-трэкер
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства.
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами:
BLHeli configurator – браузерное расширение, BLHeli configurator – отдельное приложение.
Betaflight Configurator – браузерное расширение, Betaflight Configurator – отдельное приложение.
Прошивка полетного контроллера квадрокоптера с gps (inav).
Во-первых, клоны Omnibus чаще всего приходят к нам с предустановленной прошивкой BetaFlight. Нам с вами нужно залить в полетный контроллер прошивку INAV.
Для этого, а также для последующей настройки скачиваем Inav Configurator.
Далее скачиваем и устанавливаем все необходимые драйвера, и прошиваем наш полетный контроллер точно также, как в этой статье. Разница лишь в том, что работать вы будете в INAV Configurator вместо Betaflight. Они имеют очень схожий интерфейс. Для прошивки на момент написания статьи я выбрал следующие плату и версию прошивки
Прошивка.
- Запускаем Betaflight Configurator (полетный контроллер пока не подключаем). На начальной странице видим список драйверов, которые необходимо установить. Устанавливаем все.

- Теперь можно обновить прошивку полетного контроллера. Закрываем Betaflight, зажимаем кнопочку boot на полетном контроллере и держим, снова запускаем Betaflight, отпускаем кнопочку boot.
 Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова.
Прежде всего вы должны убедиться в том, что установлен режим DFU (маркер 1 на картинке). Если этого не произошло, попробуйте повторить предыдущие шаги. Также проблемы могут возникнуть из-за криво установленных драйверов. Эту проблему можно решить очень полезной утилитой. Запустите ее от имени администратора, и она все сделает за вас. После этого, попробуйте снова. - Далее, переходите на вкладку программатор.
- Из выпадающего списка выберите полетный контроллер Fury4OSD (DIAT) .
- В следующем выпадающем списке выберите последнюю стабильную версию прошивки.
- Нажмите на ползунок “полное стирание чипа”.
- При подключенном интернете нажмите кнопку “Загрузить прошивку (Online)”. Дождитесь загрузки прошивки. После этого кнопка “Загрузить прошивку” станет активной.

- Нажимаем кнопку “Загрузить прошивку” и дожидаемся окончания ее заливки в полетный контроллер (ПК). Всё.
- Отключаем ПК. Подсоединяем снова, но уже без зажатой кнопки boot. ПК должен мигать разноцветными светодиодами.
Размер и вес
Размер определяется наличием свободного места в раме, как это написано выше и часто производители делают не очень компактные видеопередатчики, поэтому сравнивайте размеры с местом, которое есть в вашей раме.
Вес тоже имеет значение и чем он меньше, тем лучше. Сравните 2-3-4-5 похожих видеопередатчика и купите самый легкий.
Разъем для антенны
Разъемов для антенн много, но самые популярные это:
Сборка рамы.
Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта.
4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) – шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Собираем квадрокоптер своими руками (fpv). frogii mamba f405
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства.
А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Совместимость
Хитрые продавцы и производители видеопередатчиков могут писать что-то вроде «совместим с FatShark», не ведитесь на это, так как совместимость определяется только частотой, на которой вещает видеопередатчик FPV, а это всего лишь уловка.
Схема подключения периферии к полетному контроллеру omnibus f4 pro v3.
Еще немного фото квадрокоптер с GPS.
Кстати, отверстие в задней стенке не просто так. Сразу же, как мне придет LED панель, установлю ее сюда. Покупал вот такую.
Во второй части статьи пробежимся по основным настройкам квадрокоптера. Часть 2.
Установка fpv и телеметрии на квадрокоптер
Данная статья является продолжением статьи
«Квадрокоптер на MultiWii SE v2.5 — от задумки до первого полёта»
, в ней я поделюсь с Вами своим опытом установки и настройки FPV оборудования на квадрокоптер для полётов от первого лица. Заинтересовавшихся прошу под кат.


Используемые комплектующие:
1. Приёмник/передатчик Boscam 5.8Ghz 200mW 8 Channel FPV Audio Video Transmitter & Receiver TS351 RC805 2Km
2. Телеметрия CRIUS MAVLink-OSD v2.2
3. CRIUS NEO-6 GPS v3.0 I2C-GPS NAV Module v1.1
4. FPV монитор (использовал старый телевизор)
5. FPV камера (использовал уличную камеру видеонаблюдения)
Передатчик TS351, телеметрию MAVLink-OSD и камеру подключаем к MultiWii SE v2.5 по схеме ниже:


Модуль GPS NEO-6 подключаем к модулю I2C-GPS в разъём «GPS», а модуль I2C-GPS через разъём «FC» подключаем к MultiWii в разъём «I2C».




Проверка модуля GPS NEO-6 на работоспособность: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, 5V к VCC) к PC; запускаем на PC установленную программу «u-center» (ссылка на прогу в конце статьи); выбираем автоматическую скорость передачи данных -> нажимаем «Autobauding» (цифра «1»); выбираем COM порт, к которому подключен модуль GPS NEO-6 (цифра «2»); ждём…, если всё сделали правильно, через некоторое время начнут поступать данные от модуля GPS NEO-6 (цифра «3»), у меня уже через 3-4 мин. пошли данные.

Прошивка телеметрии MAVLink-OSD: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, 5V к VCC) к PC; запускаем на PC программу «Arduino IDE»; открываем прошивку «KV_Team_OSD_2.3» (ссылка на прошивку в конце статьи) — запускать нужно файл KV_Team_OSD_2.3/KV_Team_OSD/KV_Team_OSD.ino; прошиваем… Далее нужно прошить шрифты; запускаем KV_Team_OSD_2.3/KV_Team_GUI; выбираем COM порт, к которому подключен модуль MAVLink-OSD; в блоке «FONT TOOLS» нажимаем «BROWSE», выбираем шрифт «KVTOSD_FMap_v1_Small.mcm», нажимаем «Upload» и ждём пока шрифты загрузятся, в процессе будет мигать индикатор «TX» в блоке «PORT STATUS»; Теперь в блоке «OSD Controls» нажимаем «READ» (прочитать данные с платы), вносим необходимые настройки для отображения нужной Вам информации на мониторе, нажимаем «WRITE» (записать на плату). P.S. — небольшое отступление, я перепробовал не один десяток прошивок для MAVLink-OSD, но во всех шрифты никак не хотели прошиваться, то ли это особенность этой платы, то ли помогло то, что прошивая шрифты из прошивки «KV_Team_OSD_2.3» я подал питание от аккума (12V) на «аналоговую часть» платы, а «цифровая часть» платы соответственно питается от 5V!


Подключаем приёмник RC805 к монитору и при желании крепим это всё на аппу. Помните, что для корректного видео сигнала, каналы на приёмнике/передатчике должны быть идентичны!


Ссылки для скачивания:
Программа u-center
Прошивка KV_Team_OSD_2.3
P.S. — статья была подготовлена более 2-х лет назад и благополучно забыта в черновике, возможно уже и не актуальна, но всё же решил опубликовать, строго не судите…
Установка fpv камеры.
Устанавливаем FPV курсовую камеру на свое место, используя переходник, включенный в комплект камеры. Не забывайте установить угол наклона камеры относительно горизонта примерно в 30 градусов для начала. В дальнейшем вы сами его подстроите под свой стиль и скорость полетов. После этого верхнюю пластину и камеру с креплениями можно временно снять. 

Установка led подсветки на квадрокоптер.
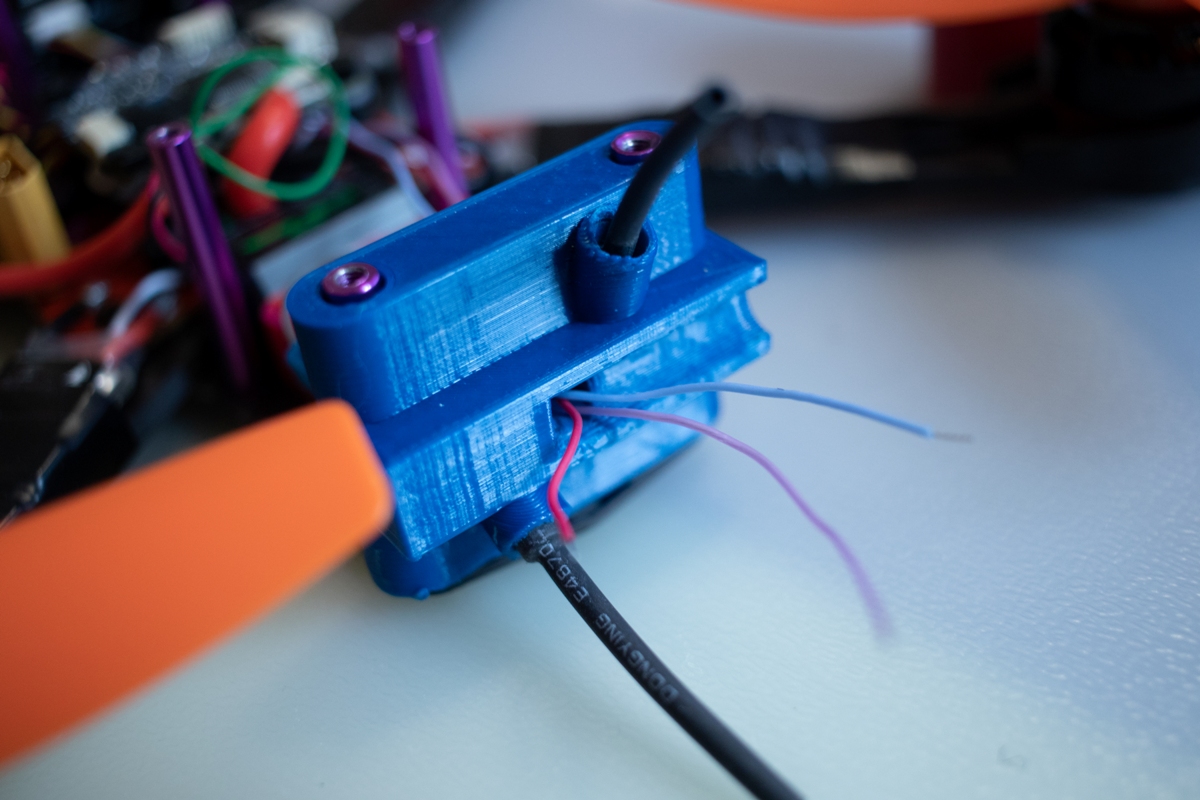
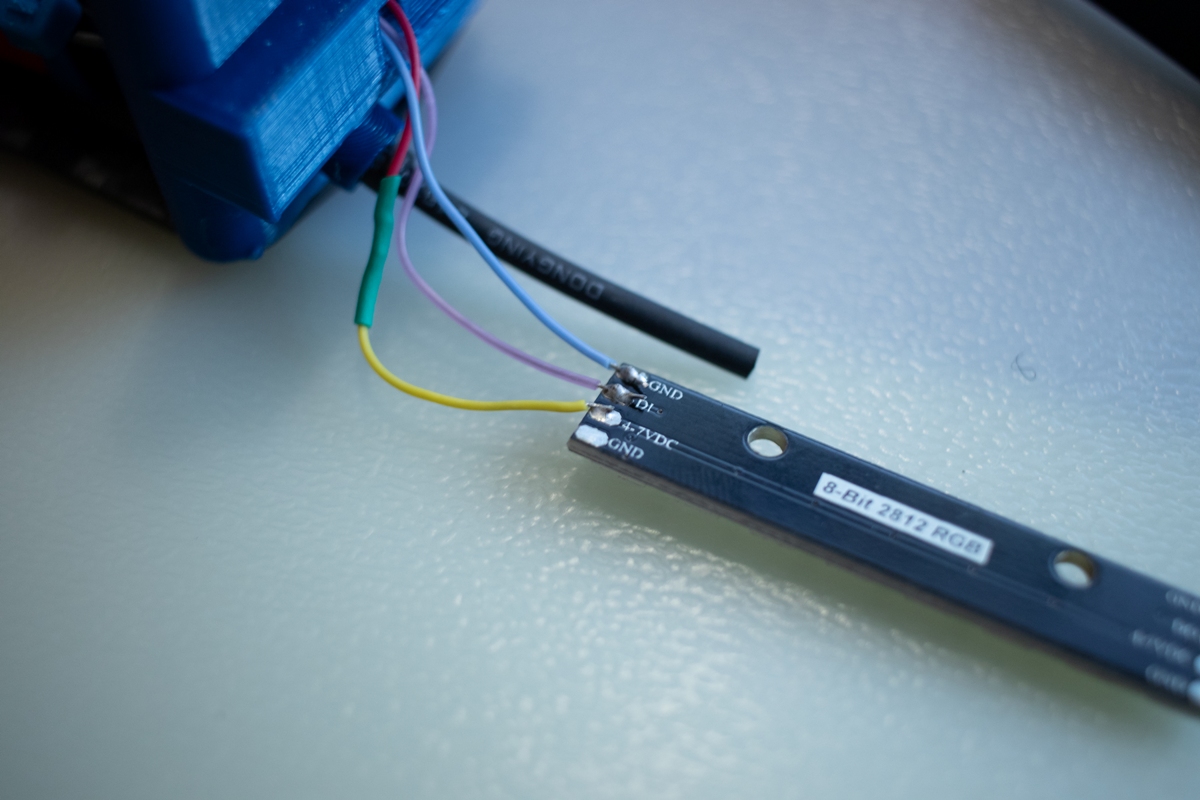
Во-первых, обозначу изменения с прошлой части. Мне, наконец-то, пришли LED панели, установил их сзади квадрокоптера. С подключением панелей трудностей не возникло, плюс и минус берем любые 5-вольтовые с платы, а сигнал LED я снял с коннектора вот таким вот образом.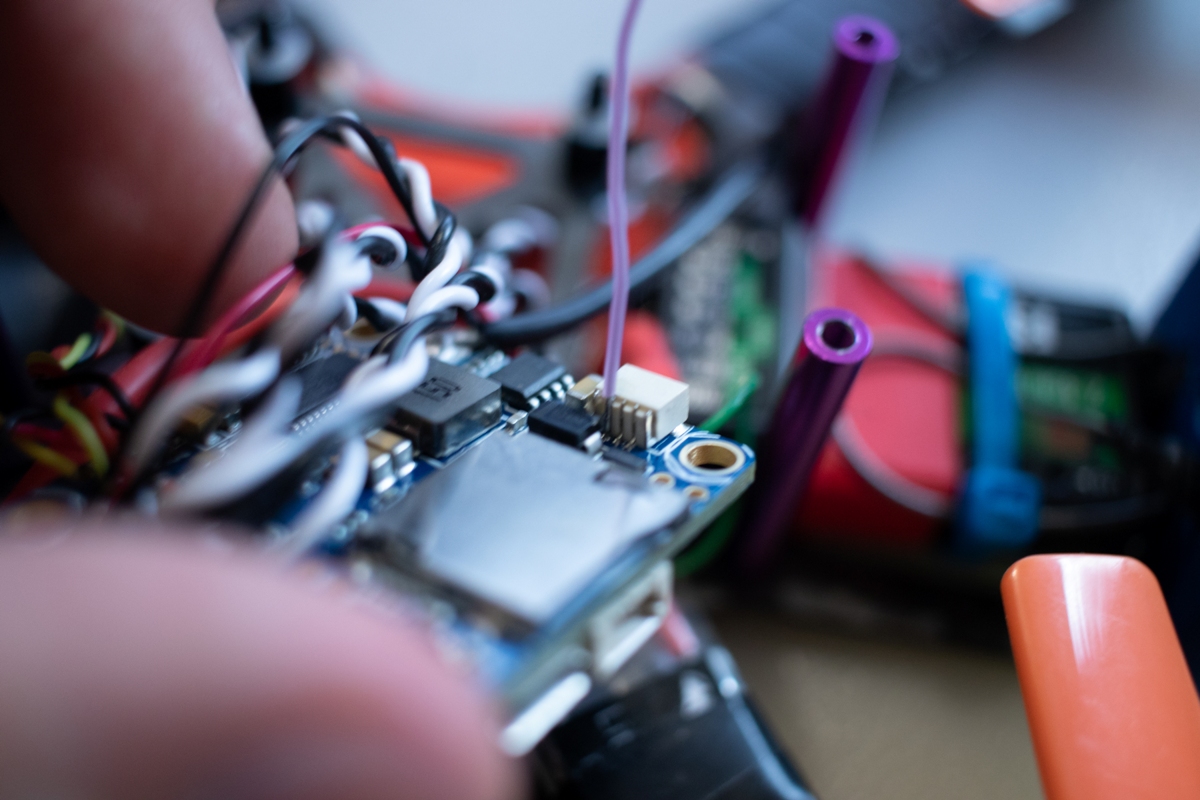

Установка и подключение gps модуля и компаса на квадрокоптер.
Для подключения GPS модуля на контроллере Omnibus F4 PRO V3 есть 6-ти пиновый разъем, показанный на картинке.
Однако модули BN-880 GPS обычно приходят с увеличенными коннекторами, не подходящими для Omnibus. Из этой ситуации есть несколько выходов:
Во-первых, спаять провода на задней стенке разъема, как я показал на примере с приемником Flysky.
Во-вторых, коннекторы можно заказать отдельно за копейки. Например, здесь.
В-третьих, посмотрите внимательно содержимое коробочек с камерами и видеопередатчиками, там могут быть подходящие вещи. Именно по третьему сценарию я решил эту проблему.
Смотрите документацию к вашему GPS модулю и просто соедините одноименные контакты модуля и контроллера между собой. НО! RX-модуля нужно соединить с TX-контроллера, а TX-модуля с RX-контроллера. Даже если вы их перепутаете, ничего не сгорит, просто модуль не запустится.
Установка моторов на раму.
Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW – моторы с вращением по часовой стрелке, CCW – против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Форм-фактор. размер
Современные видеопередатчики имеют такую же форму, как и приемники, но сейчас чаще стали продаваться видеопередатчики квадратной формы и устанавливаются над полетным контроллером башней. Какой лучше выбрать? Это зависит от рамы, если рама вашего дрона длинная, то берите обычный, а если высокая и короткая — то лучше взять квадратный форм-фактор (30*30).





 купить по привлекательной цене 46990 руб. в Москве")