

- Обзор радиоуправляемого самолета My Twin Dream MTD FPV 1800mm Wingspan EPO RC Airplane Kit
- Введение
- Характеристики авиамодели My Twin Dream
- Конструктивные разновидности передатчиков
- Оснащение для радиоуправляемого самолета My Twin Dream
- Пульт управления для самолета-дальнолета
- FPV оборудование для My Twin Dream
- Обработка управляющих сигналов и микширование
- Дальнобойный видеопередатчик для радиоуправляемого самолета
- Аналоговые и компьютерные передатчики
- Камера для записи полетного видео на авиамодели дальнолете
- Автопилот
- Модульное расширение
- Устройство передатчика
- Камера для записи полетного видео на авиамодели дальнолете
- Заключение
Обзор радиоуправляемого самолета My Twin Dream MTD FPV 1800mm Wingspan EPO RC Airplane Kit
My Twin Dream – это радиоуправляемая авиамодель рассчитанная на дальние FPV полеты.
Дальность полета ориентирована в 160 километров, а полетный вес может достигать 5 килограмм.
В конце статьи вы можете увидеть видео полета на дистанцию в 200 километров, там же приложена конфигурация электроники авиамодели и расчет энергопотребления для дальнего полета.
Авиамодель является дальнейшим развитием мультиплексовского TwinStar, имеет более емкий фюзеляж и удобный для установки FVP оборудования нос.
Видео обзор авиамодели и первый полет на ней.
А вот подробный видеообзор My Twin Dream на русском языке.
Многие считают, что радиоуправляемый самолет MyTwinDream – это один из лучших носителей для дальних FPV полетов.
Введение
Дистанционное управление подвижными моделями основано на взаимодействии человека и модели. Пилот видит положение модели в пространстве и ее скорость. При помощи аппаратуры дистанционного управления он отдает команды на исполнительные устройства модели, которые поворачивают рули или управляют двигателями, тем самым пилот изменяет положение и направление движения модели в соответствии со своим желанием.
Аппаратура радиоуправления состоит из передатчика, который находится у пилота, и размещенных на модели приемника и исполнительных механизмов. Данная статья поможет получить представление о том, как работает передатчик и какой передатчик нужен вам.
Характеристики авиамодели My Twin Dream
- Размах крыла: 1800 мм
- Длина фюзеляжа: 1230 мм
- Общая высота: 350 мм
- Высота фюзеляжа: 160 мм
- Максимальная ширина фюзеляжа: 134 мм
- Вес пустого корпуса: 960 грамм
- Максимальная взлетная масса: 5 800 грамм
- Максимальное время полета: 210 мин
- Максимальная дальность: 160 км
- Максимальная скорость: 150 км
- Максимальная высота полета: 5000 метров
- Материал: EPO
My Twin Dream MTD
Конструктивные разновидности передатчиков
По конструкции органов управления, на которые, собственно, воздействуют пальцы пилота, передатчики делятся на джойстиковые и пистолетного типа. В первых установлено, как правило, два двухкоординатных джойстика. Такие передатчики используются для управления летающими моделями. В джойстиковых передатчиках ручка имеет встроенные пружины, которые возвращают ее после отпускания в нейтральное положение.
Как правило, одно из направлений какого-то джойстика используется для управления тяговым мотором, – в нем нет возвратной пружины. При этом ручка поджата трещеткой (для самолетов) или гладкой тормозящей пластиной (для вертолетов). С помощью таких передатчиков можно успешно управлять также плавающими и ездящими моделями, однако для них придуманы специальные передатчики пистолетного типа. Здесь рулевое колесо управляет направлением движения модели, а курок – ее двигателем и тормозами.
Существует две манеры удержания передатчика. Пультовые передатчики вешаются на шею пилота с помощью специального ремня или столика-подставки. Руки пилота опираются на корпус передатчика, а каждый джойстик управляется двумя пальцами – указательным и большим. Это так называемая европейская школа. Ручной передатчик пилот держит в руках, а каждый джойстик управляется одним большим пальцем. Эту манеру относят к американской школе.
Ручной передатчик можно тоже держать в руках и управлять им по-европейски. Можно также использовать его и в пультовом варианте, если к нему купить специальный столик-подставку. Столик не хуже фирменного можно сделать самому. Такие столики требуются и для некоторых пультовых передатчиков. Какая манера более распространена у нас, зависит от возраста пилота. Молодежь, по нашим наблюдениям, более склонна к американским обычаям, а старшее поколение – к консерватизму Европы.
Оснащение для радиоуправляемого самолета My Twin Dream
- Моторы (2 шт) 900 об/вольт: или .
- Регуляторы (2 шт):
- Пропеллеы (2 шт):
- Аккумулятор: или
- Сервомашинки (4 шт): или
- Сервоудлинители (4 шт):
Это базовая конфигурация для дальних, не не рекордных полетов.
Так как любые полеты дальше 500 метров от точки взлета возможны только через FPV оборудование, то давайте посмотрим, что нужно установить на радиоуправляемый самолет.
Пульт управления для самолета-дальнолета
На мой взгляд, Taranis – это оптимальная аппаратура радиоуправления для полетов. У нее очень большие возможности за счет использования LUA скриптов, стики на подшипниках, прецизионные резисторы дающие точный отклик без дребезга и многое другое.
По возможностям она превосходит дорогие (60-80 тр) пульты управления от брендовых фирм.
К тому же, FrSky Taranis штатно позволяет летать на 1.5-2 км против стандартных 850-900 метров у любой другой аппаратуры радиоуправления на частоте 2.4 ГГц.
- Заказать FrSky Taranis можно .
Если навороты вам не нужны и вы хотите использовать бюджетный пульт управления, то тогда ваш выбор FlySky!
Это самый бюджетный полноценный пульт управления!
- Заказать FlySky FS-i6 можно .

В любом случае для дальних полетов вам придется модифицировать ваш пульт управления.
Самым простым вариантом является установка LRS модуля и приемника на частоте 433 мегагерца. Эта частота в России разрешена для бытовых целей. С помощью таких модулей и производятся полеты за 50 километров от точки взлета.
- Заказать LRS модуль с приемником можно .
Если у вас Таранис – то вы просто вставляете LRS передатчик в гнездо внешнего ВЧ модуля и все! Приемник подключается как обычно.В случае с FrSky – придется поработать паяльником.
Можно пойти другим путем и поставить усилитель на 2.4 ГГц между вашим пультом управления и антенной. Кстати, вполне подходят активные усилители для WiFi, тк частота сигнала у WiFi и RC пульта одинаковая.
- Заказать антенный усилитель 2.4 ГГц: , , .
Тут доработки потребуют оба пульта, но она гораздо проще.
Так же необходимо заменить штатные антенны на имеющие большее усиление сигнала.
- Всенаправленные: ,
- Направленная антенна:
Для сверхдальних полетов потребуется именно направленная антенна.
Так же стоит учитывать то, что радиоизлучение малополезно для организма, так что при использовании усилителя на 2.4 ГГц антенну лучше располагать на растоянии 1-2 метра от себя.
Ну вот, с базовой электроникой для самолета с дальним полетом разобрались, теперь можно поговорить и о самих полетах на этой авиамодели.
Для управления движущимися моделями требуется воздействие одновременно на несколько функций. Поэтому передатчики радиоуправления делают многоканальными. Рассмотрим количество и предназначение каналов.
Для авто и судомоделей нужно два канала: управление направлением движения и оборотами двигателя. Навороченные пистолетные передатчики имеют еще и третий канал, который может использоваться для управления смесеобразованием ДВС (радиоигла).
Для управления простейшими летающими моделями тоже могут использоваться два канала: рули высоты и элероны у планеров и самолетов, или руль высоты и направления. Для дельтапланов используют управление по крену и мощностью мотора. Также эта схема применяется и на некоторых простейших планерах – руль поворота и включение двигателя.
Такие двухканальные передатчики можно использовать для парковых моделей и электролетов начального уровня. Однако для полноценного управления самолетом нужно не менее четырех, а вертолетом – пяти каналов. Для самолетов на два двухкоординатных джойстика выводятся функции управления рулем высоты, направления, элеронами и газом двигателя.
Конкретная раскладка функций по джойстикам бывает двух типов: Mode 1 – руль высоты слева по вертикали и руль направления по горизонтали, газ справа по вертикали и крен по горизонтали; Mode 2 – газ слева по вертикали и руль направления по горизонтали, руль высоты справа по вертикали и крен по горизонтали. Есть еще Mode 3 и 4, но они мало распространены.
Mode 1 еще называют двуруким вариантом, а Mode 2 – одноруким. Эти названия следуют из того, что в последнем варианте можно довольно долго управлять самолетом одной рукой, держа в другой банку пива. Споры моделистов о преимуществах той или иной схем не стихают много лет. Авторам эти споры напоминают дискуссию о преимуществах блондинок над брюнетками. В любом случае, большинство передатчиков легко перестраиваются с одной раскладки на другую.
Для эффективного управления вертолетом нужно уже пять каналов (не считая канала управления чувствительностью гироскопа). Здесь имеет место совмещение двух функций на одно направление джойстика (как это происходит, мы рассмотрим позднее). Раскладки ручек во многом аналогичны самолетным. Среди особенностей можно отметить ручку газа, которую некоторые пилоты инвертируют (минимальный газ – вверху, максимальный – внизу), так как считают это более удобным.
Выше рассматривалось минимально необходимое число каналов для управления движением моделей. Но функций управления моделями может быть очень много. Особенно на моделях копиях. На самолетах это может быть управление уборкой шасси, закрылками и другой механизацией крыла, бортовыми огнями, тормозами колес шасси.
Еще больше функций у моделей-копий кораблей, имитирующих различные механизмы реальных судов. На планерах используют управление флаперонами и воздушными тормозами (интерцепторами), убираемыми шасси и другие функции. На вертолетах используют еще управление чувствительностью гироскопа, убираемым шасси и другими дополнительными функциями.
Здесь надо отметить, что каналы управления бывают двух типов – пропорциональные и дискретные. Проще всего пояснить это на автомобиле: газ – это пропорциональный канал, а свет фар – дискретный. Сейчас дискретные каналы используются только для управления вспомогательными функциями: включение фар, выпуск шасси.
Все основные функции управления идут по пропорциональным каналам. При этом величина отклонения руля на модели пропорциональна величине отклонения джойстика на передатчике. Так вот, в модульных передатчиках есть возможность расширения числа как пропорциональных, так и дискретных каналов. Как это делается технически, мы рассмотрим позднее.
С многоканальностью связана одна принципиальная эргономическая проблема. У человека всего две руки, которые могут управлять одновременно только четырьмя функциями. На настоящих самолетах еще используют ноги пилотов (педали). Моделисты еще к этому не пришли. Поэтому управление остальными каналами осуществляется от отдельных тумблеров у дискретных каналов или ручек – у пропорциональных, либо эти вспомогательные функции получают путем вычисления из основных. Кроме того, сигналы управления моделью также могут не прямо управляться от джойстиков, а проходить предварительную обработку.
FPV оборудование для My Twin Dream
Начнем с главного – курсовая камера и видеопередатчик.
Курсовую камеру можно установить простую, без наворотов, хорошо для этих целей подходит Eachine 1000TVL CCD
Простая, в противоударном корпусе, весьма крепкая камера с возможностью вечерне-ночных полетов.
Можете выбрать и другую, смотрите статью 6 камер для FPV полетов. Так же рекомендую посмотреть раздел дружественного сайта: . В этом разделе обзоры более 60 курсовых камер, есть что выбрать!
- Заказать Eachine 1000TVL можно .
Обработка управляющих сигналов и микширование
По прочтении предыдущих глав надеемся, вы смогли разобраться в двух главных моментах:
- передатчик можно держать по-разному, но главное – чтобы его не выронить
- в передатчиках бывает много каналов, а управляться надо всегда только при помощи двух рук, что порой бывает не очень просто
Теперь, когда есть предварительное понимание, рассмотрим еще несколько практических моментов, которые реализуют передатчики:
- триммирование
- регулирование чувствительности ручек
- реверс каналов
- ограничение расходов рулевых машинок
- микширование
- другие функции
Триммирование – очень важная вещь. Если управляя моделью вы отпустите ручки передатчика, то пружины вернут их в нейтральное положение. Вполне логично ожидать, что модель при этом станет перемещаться прямо. Однако на практике это не всегда так. Причин тому много. Например, если вы запускаете только что построенный самолет, то вы можете неправильно учесть вращательный момент от двигателя, да и вообще модель редко бывает идеально симметричной и правильной формы.
В результате – даже если рули стоят с виду ровно, модель все равно полетит не прямо, а как-то иначе. Чтобы исправить ситуацию, положение рулей надо будет подкорректировать. Но вполне понятно, что делать это прямо на модели во время запусков очень непрактично. Гораздо проще было бы чуть сдвинуть ручки передатчика в нужных направлениях.
Именно для этого и придумали триммеры! Это такие маленькие дополнительные рычажки по бокам джойстиков, которые задают их смещение. Теперь, если надо подкорректировать нейтральное положение рулей на модели, достаточно всего лишь воспользоваться нужным триммером. Причем, что особенно ценно, триммирование можно проводить прямо на ходу, во время запусков, наблюдая за реакцией модели. Если вы обнаружите, что изначально модель в триммировании не нуждается – считайте что вам крупно повезло.
Регулирование чувствительности ручки – вполне понятная функция. Когда вы настраиваете управление под конкретную модель, вам надо установить такую чувствительность, чтобы управление было для вас наиболее комфортным. В противном случае, модель будет реагировать на ручки передатчика слишком резко или, напротив, слишком вяло.
Если мы теперь мысленно перенесемся на модель, то мы обнаружим, что в зависимости от того, как установлены рулевые машинки и как подсоединены тяги, нам может потребоваться изменить их направление работы. Для этого все передатчики позволяют независимо реверсировать каналы управления.
Сама механика модели может иметь ограничения, поэтому иногда требуется ограничивать ход рулевых машинок. Для этого многие передатчики имеют отдельную функцию ограничения хода, хотя при ее отсутствии можно попытаться обойтись регулировкой чувствительности ручек.
Теперь пора коснуться более сложных моментов и рассказать вам, что такое микширование.
Когда мы управляем высотой, оба элевона отклоняются одновременно вверх или вниз, а когда управляем креном – элевоны работают в противофазе.
Элевон1 = (высота крен) / 2Элевон2 = (высота – крен) / 2
.jpg)
Т.е. сигналы от двух каналов управления смешиваются и передаются после этого на два канала исполнения. Такие вычисления, где задействуются данные с нескольких ручек управления, называются микшированием.
Микширование может быть реализовано как в передатчике, так и на модели. А сама реализация может быть как электронной, так и механической.
Специально для новичков (за исключением вертолетчиков) хочется отметить, что модели, с которых вы будете начинать, скорее всего не потребуют для своей работы микшеров. Более того, возможно, что наличие микшеров не потребуется вам очень долго (а может они вам и вообще никогда не понадобятся). Так что если вы решите приобрести себе простенькую 4-канальную джойстиковую аппаратуру, или 2-канальную пистолетную, то расстраиваться из-за отсутствующих микшеров не стоит.
В хороших передатчиках верхнего ценового диапазона вы найдете массу других функций. Степень их нужности для той или иной модели – вопрос дискуссионный. Чтобы составить себе представление о них, можно почитать описание таких передатчиков на сайтах производителей.
Сейчас мы отойдем от проблем моделизма и рассмотрим вопросы радиотехники, а именно, как информация от передатчика попадает на приемник. Тем, кто не очень понимает, что такое радиосигнал, эту главу можно пропустить, обратив внимание лишь на приведенные в конце важные рекомендации.
Итак, основы модельной радиотехники. Для того, чтобы излучаемый передатчиком радиосигнал мог переносить полезную информацию, он подвергается модуляции. То есть управляющий сигнал изменяет параметры несущей радиочастоты. На практике нашли применение управление амплитудой и частотой несущей, обозначаемые буквами АМ (Amplitude Modulation) и FM (Frequency Modulation).
В радиоуправлении используется только дискретная двухуровневая модуляция. В варианте АМ несущая имеет либо максимальный, либо нулевой уровень. В варианте FM излучается сигнал постоянной амплитуды, либо с частотой F, либо с чуть смещенной частотой F df. Сигнал FM передатчика напоминает сумму двух сигналов двух АМ передатчиков, работающих в противофазе на частотах F и F df соответственно.
Из этого можно понять даже не углубляясь в тонкости обработки радиосигнала в приемнике, что в одинаковых помеховых условиях FМ сигнал имеет принципиально большую помехозащищенность, чем АМ сигнал. АМ аппаратура, как правило, дешевле, однако разница не очень велика. В настоящее время использование АМ аппаратуры оправдано только для тех случаев, когда расстояние до модели относительно невелико.
Модуляция, как мы установили, позволяет наложить на излучаемую несущую полезную информацию. Однако в радиоуправлении используется только многоканальная передача информации. Для этого все каналы уплотняются в один посредством кодирования. Сейчас для этого используется только широтно-импульсная модуляция, обозначаемая буквами РРМ (Pulse Phase Modulation) и импульсно-кодовая модуляция, обозначаемая буквами РСМ (Pulse Code Modulation).
РРМ сигнал имеет фиксированную длину периода Т=20мс. Это означает, что информация о положениях ручек управления на передатчике попадает на модель 50 раз в секунду, что определяет быстродействие аппаратуры управления. Как правило, этого хватает, поскольку скорость реакции пилота на поведение модели намного меньше.
Диапазон изменения величины временного промежутка при движении джойстика из одного крайнего положения в другое определен от 1 до 2мс. Значение 1,5 мс соответствует среднему (нейтральному) положению джойстика (ручки управления). Продолжительность межканального импульса составляет около 0,3 мс. Данная структура РРМ сигнала является стандартной для всех производителей RC-аппаратуры.

Значения среднего положения ручки у разных производителей может немного отличаться: 1,52 мс – у Futaba, 1,5мс – у Hitec и JR, 1,6 – у Multiplex. Диапазон изменения у некоторых видов компьютерных передатчиков может быть шире, и достигать от 0,8 мс до 2,2 мс. Однако такие вариации допускают смешанное использование компонентов аппаратуры от разных производителей, работающих в режиме РРМ кодирования.
Как альтернатива РРМ-кодированию лет 15 назад было разработано РСМ-кодирование. К сожалению, различные производители RC-аппаратуры не смогли договориться о едином формате РСМ-сигнала, и каждый производитель придумал свой. Подробнее о конкретных форматах РСМ-сигналов аппаратуры разных фирм рассказано в статье “PPM или PCM?”.
Несколько слов про обозначения режимов модуляции. Комбинации из двух видов модуляции несущей и двух способов кодирования рождают три варианта режимов аппаратуры. Три потому, что амплитудная модуляция совместно с импульсно-кодовой не используется, – нет смысла. Первая обладает слишком плохой помехозащищенностью, что является главным смыслом применения импульсно-кодовой модуляции.
Итак, вы теперь знаете, что:
- использование АМ аппаратуры оправдано только для автомоделей, судомоделей и комнатных авиамоделей.
- летать с использованием AM-аппаратуры можно лишь с большой опаской и вдали от промышленных центров.
- можно использовать компоненты аппаратуры от разных производителей, работающих в режиме РРМ кодирования.
- в режиме РСМ можно использовать совместно только приемники и передатчики одного производителя.
Дальнобойный видеопередатчик для радиоуправляемого самолета
Видеопередатчик для дальних полетов лучше брать на 1.3 ГГц, при той же мощности сигнал на этой частоте позволяет получать видео на большем расстоянии.
- Заказать видеопередатчик и видеоприемник 1.3 ГГц 1500 мВт можно , 100 мВт – или 800 мВт – .
С направленной антенной на приемнике (вы же будете лететь в одну сторону, значит всенаправленный штырь на приенике не нужен) и видеопередатчиком на 400 мВт народ летает на 25-30 километров.
В болшинстве случаев, штатные антенны имеют хреновое качество, обычно на видеопередатчик ставят самодельную Vee антенну расчитанную под определенный канал, а на прием – направленную патч антенну (квадрат).
Однако, в большенстве случаев, у новичка в дальних полетах уже есть оборудование на 5.8 ГГц, так что будем рассматривать самое распространенное, кто решится на рекорды – тому эта часть статьи будет все равно малоинтересна, а кто хочет просто летать далеко, обычно желает иметь совместимость и с другими своими авиамоделями и квадрокоптерами.
Для дальних полетов используются видеопередатчики мощностью 1000-2500 мВт. На приемнике обязательна направленная антенна!
- Заказать видеопередатчик для дальних полетов на: , или .
- Направленная антенна на 5.8 ГГц: или .
Внимание! При установке видеопередатчика разносите его и приемник RC сигнала максимально далеко друг от друга!!!
Рекомендуется использовние диверсити – выбирает лучший сигнал с 2-х приемников и показывает именно его.
В бюджетном подходе возможно использование видеошлемов.
VR D2 Pro и EV800D имеют встроенный диверсити, при этом EV800D может разделятся превращаясь в FPV монитор, но у VR D2 Pro лучше встроенная запись полетного видео.
Подробнее смотрите в статье Видеошлемы для FPV полетов. А так же в обзорах: Eachine VR D2 Pro и Eachine EV800D.
- Купить FPV видеошлем: или
Аналоговые и компьютерные передатчики
Чтобы понять разницу между аналоговыми и компьютерными передатчиками, обратимся к более жизненному примеру. Лет пятнадцать назад начали распространяться программируемые телефоны. От обычного они отличались тем, что помимо разговора и определения номера звонящего абонента, позволяли запрограммировать на одну кнопку набор целого номера, или составить “черный список” абонентов, на звонки которых телефон не реагировал.

Появилась куча дополнительных сервисов, которые простому абоненту часто были не нужны. Так вот, аналоговый передатчик – это как простой телефон. В нем обычно не более 6 каналов. Как правило, реализованы простейшие из описанных выше сервисов: имеется реверс каналов (иногда не всех), триммирование и регулировка чувствительности (обычно, на первые 4 канала), установка крайних значений канала газа (холостого хода и максимальных оборотов).
Компьютерная аппаратура характеризуется тем, что все настройки в них можно запрограммировать при помощи кнопок и дисплея так же, как на программируемых телефонах. Сервисов здесь может быть море. Из основных стоит отметить следующие:
- Наличие памяти на несколько моделей. Очень удобная вещь. Можно запомнить все настройки микшеров, реверсов и расходов, чтобы не перестраивать передатчик, когда вы решите его использовать с другой моделью.
- Запоминание значений триммеров. Весьма удобная функция. Вы можете не беспокоится, что при транспортировке триммеры случайно собьются, и вам придется вспоминать их положение. Перед запуском модели достаточно будет всего лишь проверить, что триммеры установлены “по центру”.
- Большое количество встроенных микшеров и переключателей режимов работы позволит реализовать самые разнообразные функции на сложных моделях.
- Наличие дисплея заметно облегчает настройку аппаратуры.
По количеству функций и цене компьютерная аппаратура варьируется в довольно широких пределах. Конкретные возможности лучше всегда смотреть на сайте производителя или в инструкции.
Самые дешевые аппараты могут идти с минимумом функций, и ориентированы в первую очередь на удобство эксплуатации. Это в первую очередь память моделей, цифровые триммеры и пара микшеров.
Боле сложные передатчики, как правило, отличаются количеством функций, расширенным дисплеем и дополнительными режимами кодирования данных (для защиты от помех и повышения скорости передачи информации).
Такие модели имеет смысл покупать ради удобства пользования или ради каких-то особенно хитрых функций (которые могут понадобится, только если вы захотите серьезно заниматься спортом). Навороченность приводит к тому, что топовые модели уже конкурируют между собой не по числу функций, а по удобству программирования.

Многие компьютерные передатчики имеют сменные модули памяти настроек моделей, которые позволяют расширить встроенную память, а также легко переносить настройки модели с одного передатчика на другой. Ряд моделей предусматривают смену программы управления, путем замены специальной платы внутри передатчика.
Надо отметить, что гибкость в использовании компьютерной аппаратуры имеет и отрицательные черты. Один из авторов подарил недавно теще программируемый телефон, так она с его программированием повозилась с недельку и вернула с просьбой купить ей простой, как она говорит “нормальный телефон”.
Камера для записи полетного видео на авиамодели дальнолете
На мой взгляд – наоболее оптимальная камера при полете на дальние дистанции, это RunCam 2!
Она имеет более аэродинамичный корпус чем обычные экшенкамеры, может питаться от бортового аккумулятора напрямую (5-17 Вольт), ее можно использовать и как курсовую (малая FPV задержка), подробнее смотрите в статье Обзор RunCam 2.
- Заказать экшенкамеру RunCam 2 можно .
Но, если хочется снять красивое видео без покачиваний от порывов ветра, то часто устанавливают трехосевой стабилизатор и GoPro или GitUp 2.
Такой девайс весьма сильно увеличит лобовое сопротивление и уменьшит автономность полета, но, что не сделаешь для красивых кадров! 🙂
Место расположения подвеса выбирается по своему вкусу, главное – соблюсти центровку авиамодели.
- Заказать недорогой подвес можно .
- Заказать экшенкамеру: или .
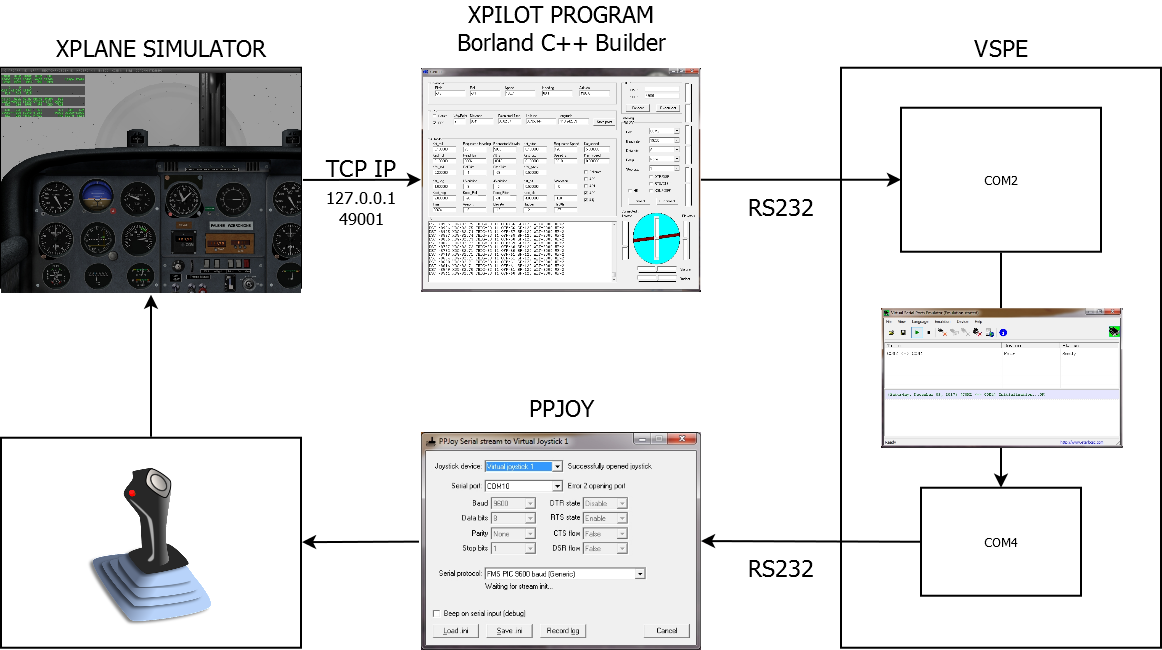
Автопилот
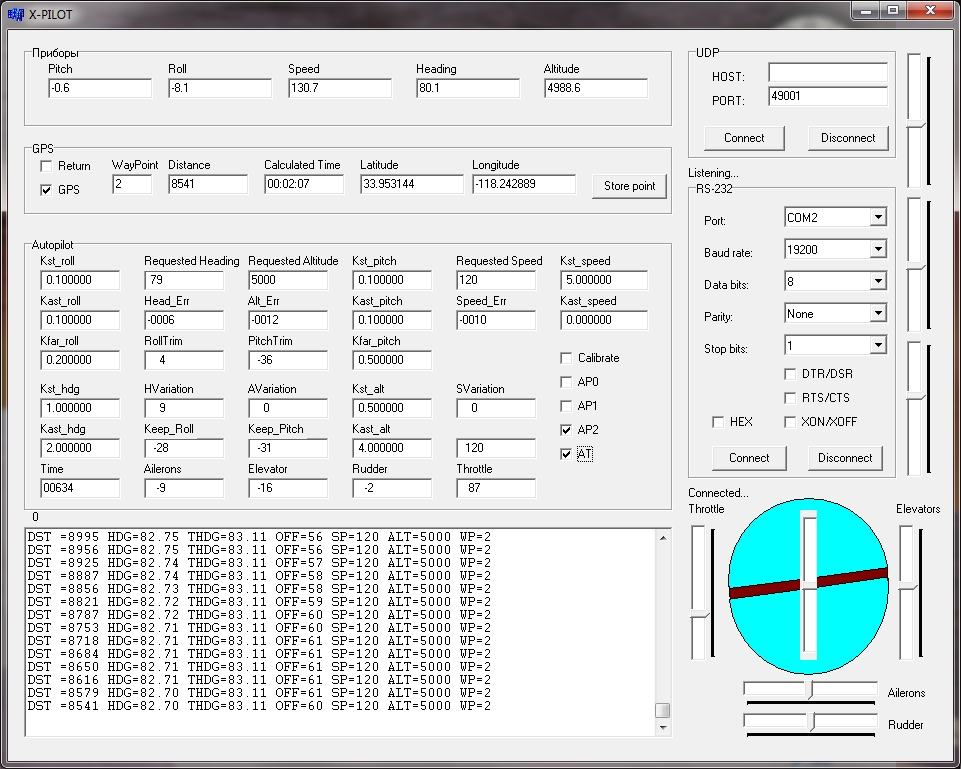
Программа автопилота написана в среде Borland C Builder 6. Поле “Приборы” (Рис.11) показывает исходные данные с датчиков, которые обновляются 20 раз в секунду. Здесь мы видим Pitch (Тангаж, градусы), который вычисляется по акселерометру в радиоуправляемом самолете, Roll (Крен, градусы), который вычисляется по продольно установленному гироскопу, измеряющему скорость разворота самолета.
при разгоне самолет сразу же приподнимает хвост. Это отличие от реальности. А вот крен действительно вычисляется по угловой скорости разворота самолета. Вычисленное значение крена и демонстрируется в виде условного авиагоризонта в правом нижнем углу программы. (Рис.2) Значение тангажа показывает слайдер в центре авиагоризонта.
Рис. 2
Checkbox GPS включает полет по маршруту, записанному в таблице. При этом поля Requested Heading, Requested Altitude и Requested Speed заполняются автоматически из структурыtypedef struct WPNT { int pid; int speed; int altitude; int heading; int latitude; int longitude; }WPNT;
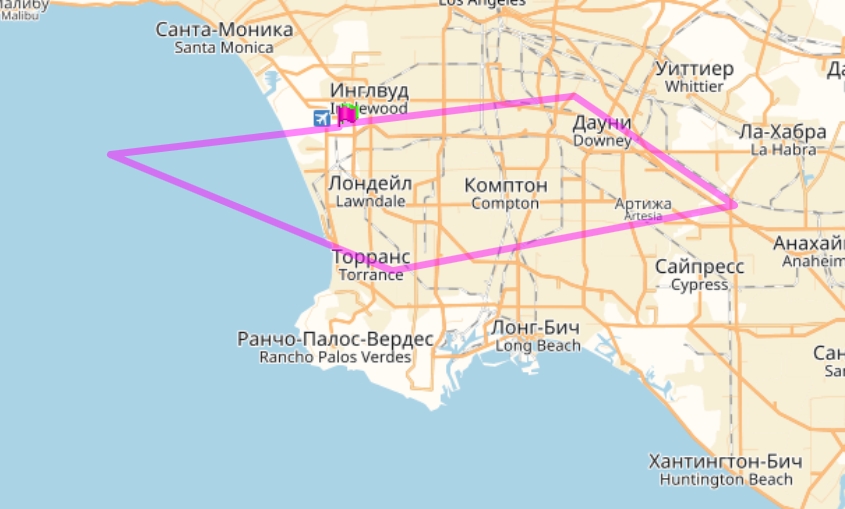
В демонстрации структура содержит пример маршрута около аэропорта Los Angeles. (Рис.3)Для изменения маршрута необходимо изменить структуру и перекомпилировать проект. Если GPS выключен, то эти поля можно заполнить вручную. Активация значения в поле происходит при двойном клике мышки. Checkbox Return позволяет вернуться к точке, запомненной при нажатии кнопки Store Point.
WayPoint — номер точки маршрута; Distance — дистанция до следующей маршрутной точки; Calculated Time — приблизительное время достижения следующей точки (приблизительно потому что не учитывается скорость ветра), и далее — координаты GPS широта-долгота. Справа вверху панель UDP сервера. Ниже нее панель управления портом RS232. Здесь следует менять только номер порта. Остальные параметры жестко определены взаимодействием с виртуальным джойстиком.
Легенда: RW — change allowed, RO — only for look, RWP- change allowed partiallyKst_roll (RW) — статический коэффициент усиления петли ОС (обратной связи) по кренуKast_roll (RW) -астатический коэффициент усиления петли ОС по кренуKfar_roll (RW) — коэффициент триммирования по кренуKst_hdg (RW) — статический коэффициент усиления по удержанию курсаKаst_hdg (RW) — астатический коэффициент усиления по удержанию курсаTime (RO) — время в полете, секунды.
Requested Heading(RWP) — запрошенный курс, градусы (Вручную или из таблицы если GPS вкл)Head_Err (RO) — Ошибка по курсу, градусыRollTrim (RO) — поправка триммирования по кренуHVariation (RO) — скорость изменения курса гардус/сек.Keep_Roll (RO) — удерживаемый крен, градусыAilerons (RO) — положение элеронов самолетаRequested Altitude (RWP) — запрошенная высота, футы (Вручную или из таблицы если GPS вкл)Alt_Err (RO) — Ошибка по высоте, футыPitchTrim (RO) — поправка триммирования по тангажуAVariation (RO) — скорость изменения высоты футов/сек.
Keep_Pitch (RO) — удерживаемый тангаж (градусы)Elevator (RO) — положение руля высоты самолетаKstpitch (RW) — статический коэффициент усиления петли ОС по тангажуKast pitch (RW) -астатический коэффициент усиления петли ОС по тангажуKfar_ pitch (RW) — коэффициент триммирования по тангажуKst_alt (RW) — статический коэффициент усиления по удержанию высотыKаst_alt (RW) — астатический коэффициент усиления по удержанию высотыRudder (RO) — положение руля направления самолетаRequested Speed (RWP) — запрошенная скорость, миль/час(knots) (Вручную или из таблицы (GPS вкл))Speed_Err (RO) — ошибка по скорости(knots)SVariation (RO) — скорость изменения скорости(knots)Keep_Throttle (RO) — удерживаемая скорость(knots)Throttle(RO) — положение РУДKst_speed (RW) — статический коэффициент усиления по удержанию скоростиKast_speed (RW)- астатический коэффициент усиления по удержанию скоростиCalibrate — ChechBox включения калибровки джойстикаAP0 — CheckBox режим 0 автопилота — удержание крена = 0 и тангажа = 0AP1- CheckBox режим 1 — удержание текущей высоты и текущего курсаAP2- CheckBox режим 2 — удержание курса и высоты по таблице (GPS вкл.) или по установленным значениям (GPS откл.)AT — CheckBox — автомата тяги
Около “авиагоризонта” есть слайдеры, с их помощью можно вручную управлять самолетом в случае отключения автопилота или автомата тяги. Справа с краю есть еще три слайдера, это составляющие управления рулем высоты: (выведены для отладки)
верхний — статическая составляющая TrackAltErrсредний — астатическая составляющая TrackVarErrсредний — составляющая триммирования TrackTrim
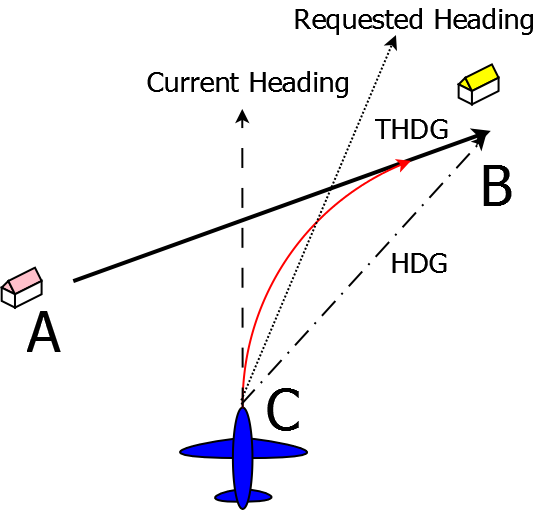
DST — дистанция до следующей точки в футах (C-B на рис. 13)HDG — курс непосредственно на следующую маршрутную точку (С-B на рис.13)THDG — курс, с которым следует подлететь к следующей точке (А-B на рис.13)OFF — смещение от требуемой траектории в футах (расстояние от точки С до линии AB Рис.13)SP — требуемая воздушная скорость полетаALT — требуемая высота полетаWP — следующая путевая точка
Так как дальние полеты сопровождаются риском потери сигнала, то для минимизаии риска превращения радиоуправляемой авиамодели в свободноулетающую нужен автопилот!
Это не обязательное требование, многие летают и без него, но зато есть разница – вернется авиамодель самостоятельно в точку взлета или вам придется искать ее в 10-100 километрах от точки взлета. Первое требует вложения денег, второе – времени и имеет не нудевую вероятность потери всего оборудования установленного на самолете.
Обязательно поставьте GPS трекер!!!
Даже с автопилотом ваш дальнолетный самолет может не дотянуть до точки взлета (например – возвращаемся против сильного ветра, который поменял направление после вашего вылета). Искать легче, когда у вас есть GPS координаты посадки записанное полетное видео (пишем на видеошлем).
Без треккера и без автопилота – не отлетайте дальше километра от точки взлета!
Видео поиска авиамодели с помощью GPS треккера
- Заказать GPS треккер можно или .
Лучше брать первый вариант – у него внешнее питание (12-100 Вольт) встроенный аккумулятор. Прочная противоударная конструкция, даже при тотальном краше с пары километров высоты он сможет передать точку своего местонахождения.
Но, вернемся к поелтным контроллерам.
Оптимальным для новича считается автопилот FY-41AP Lite. Он хоть и старенький, но летает практически “из корбки без настроек”.
Поддерживает “автовозврат”, “воздушный забор”, “полет по точкам”. Об этом автопилоте достатточно большая дисскуссия на нашем авиамодельном форуме тут.
- Заказать автопилот FY-41AP Lite можно .
Модульное расширение
Теперь объясним, как происходит уплотнение каналов при модульном расширении их числа. Разными производителями выпускаются модули, позволяющие по одному основному каналу передавать до 8 пропорциональных, либо дискретных дополнительных каналов. При этом в передатчик устанавливается модуль кодера с восемью ручками или тумблерами, занимающий один из основных каналов, а к приемнику в гнездо этого канала включается декодер, имеющий восемь пропорциональных либо дискретных выходов.
Принцип уплотнения сводится к последовательной передаче через данный основной канал по одному дополнительному в каждом 20-ти миллисекундном цикле. То есть, информация обо всех восьми дополнительных каналах с передатчика на приемник попадет только через восемь циклов сигнала – за 0,16 секунды. По каждому разуплотненному каналу декодер выдает выходной сигнал как и по обычному – один раз в 0,02 секунды, повторяя одно и тоже значение восемь раз.
Отсюда видно, что уплотненные каналы обладают намного меньшим быстродействием и их нецелесообразно задействовать для управления быстрыми и важными функциями управления модели. Таким способом можно создавать и 30-канальные комплекты аппаратуры. Для чего это надо? В качестве примера приведем перечень функций модуля освещения и сигнализации модели-копии магистрального тягача:
- Габаритные огни
- Дальний свет
- Ближний свет
- Фара-искатель
- Стоп-сигнал
- Включение заднего хода (две последние функции срабатывают автоматически от положения управления газом)
- Левый поворот
- Правый поворот
- Освещение кабины
- Клаксон
- Проблесковый маячок
Модульные передатчики чаще используют копиисты, для которых важнее зрелищность поведения модели, реалистичность того, как она выглядит, а не ее динамика поведения. Для модульных передатчиков выпускается большое количество разнообразных модулей целевого назначения. Упомянем здесь лишь блок триммирования элеронов пилотажных моделей.
В отличие от моноблочных передатчиков, где параметры управления в режимах “флаперонов”, воздушного тормоза – (по нашему “крокодил”, а на западе “баттерфляй”) и дифференциального отклонения программируются в меню, здесь каждый параметр выведен на свою ручку. Это позволяет вести настройку непосредственно в воздухе, т.е. не отводя взгляда от летящей модели. Хотя это тоже дело вкуса.
Устройство передатчика
Передатчик аппаратуры радиоуправления состоит из корпуса, органов управления (джойстики, ручки, тумблеры и т.п.) платы кодера, ВЧ-модуля, антенны и батареи аккумуляторов. Кроме того, в компьютерном передатчике есть дисплей и кнопки программирования. Пояснения по корпусу и органам управления давались выше.
На плате кодера собрана вся низкочастотная схема передатчика. Кодер последовательно опрашивает положение органов управления (джойстиков, ручек, тумблеров и т.п.) и в соответствии с ним формирует канальные импульсы РРМ (или РСМ) сигнала. Здесь же вычисляются все микширования и другие сервисы (экспонента, ограничение хода и т.п.). С кодера сигнал попадает на ВЧ-модуль и тренерский разъем (если он есть).
В этом случае сменный кварц отсутствует, а несущая радиосигнала формируется специальным синтезатором частоты. Частота (канал), на которой будет работать передатчик, задается при помощи переключателей на ВЧ-блоке. Некоторые топовые модели предатчиков умеют устанавливать частоту синтезатора прямо из меню программирования. Такие возможности позволяют без проблем разносить пилотов на разные каналы в любых комбинациях заездов и туров соревнований.
Практически на всех передатчиках радиоуправления используется телескопическая антенна. В развернутом виде она достаточно эффективна, а в свернутом – компактна. В отдельных случаях допускается заменять штатную антенну на укороченную спиральную, производимую многими фирмами, либо самодельную.
Она намного удобнее в пользовании и более живуча в условиях суеты соревнований. Однако, в силу законов радиофизики, ее эффективность всегда ниже, чем у штатной телескопической, и ее не рекомендуется использовать для летающих моделей в сложной помеховой обстановке крупных городов.
Во время использования телескопическая антенна обязательно должна быть вытянута на полную длину, иначе дальность и надежность связи резко падают. Со сложенной антенной перед полетами (заездами) проверяют надежность радиоканала, – на расстоянии до 25-30 метров аппаратура должна работать. Складывание антенны обычно не повреждает работающий передатчик.
В практике имелись единичные случаи выхода ВЧ-модуля из строя при складывании антенны. По-видимому, они были обусловлены некачественными комплектующими и с такой же вероятностью могли случиться вне зависимости от складывания антенны. И еще, телескопическая антенна передатчика плохо излучает сигнал в направлении своей оси. Поэтому старайтесь не направлять антенну на модель. Особенно, если она далеко, а помеховая обстановка плохая.
В большинстве даже простых передатчиков предусмотрена функция “тренер-ученик”, позволяющая проводить обучение начинающего пилота более опытным. Для этого два передатчика соединяются кабелем между собой через специальный “тренерский” разъем. Включается передатчик тренера в режим излучения радиосигнала.
Передатчик ученика радиосигнал не излучает, а РРМ-сигнал с его кодера передается по кабелю на передатчик тренера. На последнем имеется переключатель “тренер – ученик”. В положении “тренер” на модель передается сигнал о положении ручек тренерского передатчика. В положении “ученик” – с передатчика ученика.
Поскольку переключатель находится в руках тренера, тот в любой момент перехватывает управление моделью на себя и тем самым подстраховывает новичка, не давая ему “сделать дрова”. Так ведется обучение пилотированию летающих моделей. На тренерский разъем выведен выход кодера, вход переключателя “тренер-ученик”, земля, и контакты управления питанием кодера и ВЧ-модуля.
В некоторых моделях при подключении кабеля включается питание кодера при выключенном питании передатчика. В других при закорачивании управляющего контакта на землю выключается ВЧ-модуль при включенном питании передатчика. Помимо основной функции тренерский разъем используется для подключения передатчика к компьютеру при эксплуатации с симулятором.
Питание передатчиков стандартизовано, и осуществляется от батареи никель-кадмиевых (или NiMH) аккумуляторов с номинальным напряжением 9,6 вольт, т.е. от восьми банок. Отсек под аккумулятор в разных передатчиках имеет разный размер, а значит, готовая батарея от одного передатчика может не подойти к другому по габаритам.
В простейших передатчиках могут использоваться обычные одноразовые батарейки. Для регулярного использования это разорительно.
Топовые модели передатчиков могут иметь дополнительные узлы, полезные моделисту. Multiplex например, в свою 4000 модель встраивает панорамный сканирующий приемник, позволяющий перед полетами посмотреть наличие излучений в диапазоне частот. Некоторые передатчики имеют встроенный (с выносным датчиком) тахометр.
Есть варианты тренерского кабеля, выполненного на основе оптоволокна, что гальванически развязывает передатчики и не создает помех. Есть даже средства беспроводного связывания тренера с учеником. На многих компьютерных передатчиках имеются сменные модули памяти, где хранится информация о настройках моделей. Они позволяют расширить набор запрограммированных моделей и переносить их с передатчика на передатчик.
Итак, теперь вы знаете, что:
- путем замены кварцев, можно менять канал аппаратуры в пределах рабочего диапазона
- путем замены сменного ВЧ-модуля легко перейти с одного диапазона на другой.
- ВЧ-модули рассчитаны на работу только с одним видом модуляции: амплитудной либо частотной.
- во время использования телескопическая антенна обязательно должна быть вытянута на полную длину, иначе дальность и надежность связи резко падают.
- складывание антенны не повреждает работающий передатчик.
Камера для записи полетного видео на авиамодели дальнолете
Электроника установленная на авиамодели:
- Моторы: (2x) 470Kv MN3110-26 T-motors
- Аккумулятор: 31500mAh 6S LiIon (2654 грамм)
- Регуляторы: (2x) 40A YEP ESCs – set to AFW and have worked flawlessly for 62 flights so far.
- Пропеллеры: (2x) Aeronaut CAM Power Props 10×6 (AER7226/22)
- Пульт управления: Taranis x9D Plus
- Полетный контроллер: Eagletree Vector w/GPS V2
- Наземный модуль: Eagletree Eagleeyes Diversity and multi video splitter
- Бортовое питание: Castle Creations 10A BEC
Характеристики дальнего полета:
- Полетный вес: 4617 грамм
- Расстояние до разворота: 103.6 км
- Общая дистанция полета: 212.9 км
- Время полета: 3ч 54 мин 31 секунда
- Токопотребление за полет: 21849 мАч
- Расход мАч/км: 21849 мАч/212.9 км = 102.63 мАч/км
Как видите – полет за 100 километров от точки взлета и возврат на этой авиамодели вполне возможен!
Как бы ни были неприхотливы, просты и дешевы учебные радиоуправляемые модели самолетов, они тоже могут падать и их тоже приходится восстанавливать и ремонтировать. Как же избежать этих неприятностей? Таким же образом, как это делается в «большой» авиации.
При обучении пилотов в летных училищах применяются учебные самолеты — «спарки», в которых инструктор, находясь рядом с курсантом, всегда может вмешаться в управление, исправляя грубые ошибки. Этот же прием используется и в случае с моделями самолетов. Для совместно управляемых полетов используется дублирующий пульт управления — он в руках у инструктора.
Но существует и по-настоящему безопасный метод обучения. Это применение компьютерных симуляторов. Специальная программа моделирует поведение самолета на экране монитора (моделирование модели!). Нарисованный на экране радиоуправляемый самолет можно контролировать обычным джойстиком, но лучше для этого использовать «родной» пульт, подключив его к компьютеру.
Хороший симулятор не только моделирует летные качества самолета, но может добавить ветер, порывы ветра, восходящие или нисходящие потоки. Симулятор хорош не только для обучения новичков. С его помощью можно отрабатывать сложные и опасные маневры, поддерживать форму, когда реальные тренировки невозможны. Наконец, с его помощью можно сэкономить на топливе и на летном ресурсе модели!
При любом способе обучения от новичка потребуются максимальная собранность и терпение. Даже компьютерный симулятор не дает гарантии безаварийных полетов.
Заключение
Прочитав краткое введение в тему передатчиков аппаратуры радиоуправления вы примерно представили, какой передатчик нужен именно вам. Однако, разнообразие предложений рынка проблему выбора не облегчает, особенно в начале занятий радиомоделизмом. Позволим себе высказать несколько советов по этому поводу.
Передатчик радиоуправления является самой живучей частью всего, что связано с моделизмом. Он находится в руках у пилота, а не носится со страшной скоростью, норовя покалечить окружающих и саму модель со всей ее начинкой. Если не перепутывать полярность аккумулятора передатчика, не наступать на него ногами и не ронять на пол, то он верой и правдой может служить годами и десятилетиями.
Если вы занимаетесь моделизмом не в одиночку, а вместе с близким другом, можно вообще приобретать один передатчик на двоих. Поскольку передатчик является компонентой длительного пользования, то лучше приобретать сразу хороший аппарат. Он будет стоить недешево, но покроет ваши возросшие со временем потребности, и вам не придется продавать его через год за пол-цены, потому что в нем не хватает каких-либо микшеров или других функций.
По опыту авторов, качество изготовления передатчиков зависит от их ценовой группы. По-видимому, на заводах-изготовителях более дорогие модели жестче контролируются как во время сборки, так и на этапе закупки комплектующих. Не спровоцированный отказ передатчика вообще штука крайне редкая, а в дорогих моделях – почти не встречающаяся.
https://www.youtube.com/watch?v=GBLob051CUQ
Для дорогих передатчиков выпускаются специальные алюминиевые чемоданчики, используемые для хранения и транспортировки на летное поле. Для аппаратов подешевле можно приобрести специальный пластиковый бокс, либо сделать его самому. Такой специальной тарой не стоит пренебрегать тем, кто регулярно (еженедельно) выезжает на полеты или заезды. Он не раз спасет от ударов и разрушений ваш любимый передатчик, который прослужив вам немало лет, может быть, перейдет по наследству вашему сыну.


, цена 4600 руб")




