

Уроки управления радиоуправляемой модели самолета для начинающих
На чем учиться?
Прежде всего, посмотрите на свою радиоуправляемую модель самолета. Без сомнения он отвечает вашим эстетическим требованиям. Но подходит ли он для первоначального обучения или открытия сезона? В идеальном случае это должен быть аппарат с двухтактным двигателем рабочим объемом до 6,5 см3 1,5 мм (бальза 1,5 мм). Крыло – без сужения, с выраженным поперечным углом “V” и с профилем с плоской нижней поверхностью.
Удельная нагрузка на крыло не должна превышать 60 г/дм2. Желательно (но вовсе не обязательно), чтобы это был высокоплан, имеющий трехстоечное шасси. Если вы собираетесь эксплуатировать модель с травяного покрытия, установите колеса несколько большего диаметра, чем принято.
Если вы сторонник использования готовых моделей, учтите следующее. Особое место среди учебных аппаратов, изготавливаемых промышленным образом в виде наборов, занимают самолеты фирмы U.S. AirCore, выполненные из пластикового гофрокартона. В отличие от бальзовых, эти машины выдерживают практически любые удары, но имеют худшую аэродинамику, тяжелы, а главное – постоянно изменяют форму, что требует триммирования при каждом выезде на поле.
Регулировка
Уделите должное внимание регулировке (отметим, что многие фирменные модели заводской сборки имеют несоответствующую чертежам центровку даже в рекомендуемой комплектации). Чтобы проконтролировать центровку, поднимите самолет на уровень глаз или над головой, поддерживая его за нижнюю поверхность крыла в районе корневых нервюр. Теперь найдите точку, опираясь о которую, можно было бы удерживать модель в состоянии равновесия. Отметьте ее маркером или фломастером – это центр тяжести.
Измерьте расстояние от передней кромки крыла до центра тяжести, разделите его на средний размер длины хорды и умножьте на 100%. Так получится величина центровки модели, выраженная в процентах от САХ (средней аэродинамической хорды). Она должна находиться в пределах 20-30%. При более передней центровке может не хватить руля высоты для выравнивания при посадке. При более задней – модель будет недостаточно устойчива, а при центровке более 33% модель, как правило, неустойчива и опасна для полетов.
Кстати говоря, рекомендуемый диапазон летных центровок в 20-30% полезно заранее разметить на нижней поверхности крыла с помощью полоски цветного скотча (длина полоски должна быть равна диапазону в 10% хорды). При модернизации и ремонте модели следите, чтобы центр тяжести не вышел за допустимые пределы. Перед первым полетом модели еще проверьте центровку с полностью заправленным баком.
Отрегулируйте расход рулей в точном соответствии с чертежами или инструкцией. Обычно, указанные в описании расходы кажутся слишком малыми, но для тренировочных полетов этого достаточно, а большие могут сделать модель слишком “верткой”.
Первый выход на летное поле
Посчастливилось найти опытного моделиста, который на приемлемых условиях займется вашим обучением -отлично. Если нет, то не останется ничего другого, как собрать полетный ящик и следовать нашим дальнейшим инструкциям.
Приехав на поле в первый раз, прежде всего, проверьте дальность действия аппаратуры. С убранной антенной передатчика медленно отходите от модели, работая ручками. Когда рули начнут беспорядочно дергаться, остановитесь и измерьте расстояние. Оно должно быть не меньше 25 м.
Обкатав двигатель на земле, дозаправьте бак, дайте двигателю немного остыть и вновь запустите его. Поднимите нос модели вверх под углом 30°-45°. Если двигатель начинает терять обороты, значит, смесь бедная и необходимо открыть иглу большого газа на 1/8 оборота. Повторите эту проверку и добейтесь устойчивой работы двигателя, иначе модель может свалиться на крыло сразу после отрыва от земли.
Перед взлетом
Проверьте правильность направления движения рулей, уделив особое внимание элеронам (отклонение правого элерон вниз дает левый крен). Повторяйте эту операцию перед каждым взлетом, так как бывает, что после смены модели переключатели реверса на передатчике остаются в неправильном положении. Если ваш передатчик имеет переключатели расходов рулей, проверьте правильность их положения, поскольку тумблеры очень легко задеть, беря, передатчик дрожащей рукой.
Оцените направление ветра по лавсановой ленточке, которую стоит привязать на антенну.
Сориентируйте модель против ветра. Если модель будет взлетать с грунта, в этом направлении разбега должна быть ровная грунтовая дорога или низкий травяной покров. Зажав хвостовую часть фюзеляжа модели между ногами, проверьте приемистость двигателя. Посмотрите, нет ли в направлении взлета людей. Имейте в виду, что при разбеге возможны неконтролируемые развороты.
Теперь – взлетать.
Но… продуман ли заранее план полета? Не обольщайтесь на тот счет, что удастся точно ему следовать, но в любом случае составить его просто необходимо. Это может быть несложный полет по кругу, либо полет по базе с разворотами на 180°. И для начала ничего больше! Почти все аварии у новичков происходит из-за того, что, впав в эйфорию после первого удачного разворота, начинающий пилот вдруг решает выполнить бочку или обратную петлю, не имея ни малейшего представления о динамике модели.
Взлет
Установив малые обороты двигателя, отпустите модель и плавно прибавьте газ до большого. Второй вариант: помощник держит самолет за кончик киля на максимальном газу, и по вашей команде отпускает его без толчка вперед. Имейте в виду, что все самолеты, а в особенности с двухстоечным шасси, имеют тенденцию к развороту влево вследствие реакции винта. Поэтому будьте готовы компенсировать разворот отклонением руля направления.
Из-за малых моментов инерции модели это сложнее чем кажется, поэтому руль луче отклонить до начала движения, а потом уточнить угол отклонения, действуя быстро. В целом, задача удержать модель на узкой грунтовой или бетонной дорожке походит на балансирование канатоходца, поэтому не расстраивайтесь, если первые пять-десять раз модель уедет в траву (именно поэтому многие предпочитают взлет с рук или с бетонки немереной ширины).
Модель с двухстоечным шасси имеет также тенденцию к капотированию на разбеге. Поэтому, если вы видите, что модель разбегается с хвостом, поднятым выше горизонтального положения, дайте немного руль на себя. Модель нужно разогнать по земле до скорости, несколько превосходящей скорость отрыва.
Если по какой либо причине этого сделать не удалось, а дистанция для разбега почти исчерпана (приближается кромка высокой травы), сбросьте газ и не пытайтесь преждевременно оторвать модель от земли.
Для взлета дайте руль высоты на себя настолько. Резких движений ручкой не делайте – угол отклонения руля должен быть достаточным лишь для набора высоты под небольшим углом. Одновременно будьте готовы скомпенсировать крен элеронами. Крен после отрыва возникает практически всегда и может быть вызван моментом винта, турбулентными вихрями у земли или перекосом крыла.
Если модель раскачивается по крену и плохо реагирует на элероны – это верный признак того, что взлет произведен рано. Тогда единственный выход – не задирать модель вверх и отчаянно бороться с кренами, пока самолет не наберет достаточную скорость, и только после этого начать нормальный набор высоты. Никогда не взлетайте по крутой траектории, как бы хорошо вы не пилотировали. Дело в том, что в случае отказа двигателя не останется ни малейшей возможности перевести модель на планирование, и неизбежно произойдет сваливание на крыло с одновременной потерей эффективности рулей.
Кроме того, каждый самолет имеет свой оптимальный угол набора высоты, при котором достигается максимальная скороподъемность. При превышении этого угла скорость начинает падать, а при более крутом “задирании” модели возможно сваливание.
В случае отказа двигателя на взлете сразу же отдайте ручку управления от себя так чтобы перевести модель на планирование и приготовьтесь к посадке без изменения направления полета.
Полет на высоте
Набрав примерно 50 метров высоты, сделайте левый разворот на 90°. Для этого элеронами введите модель в крен (примерно 45°) и возьмите руль высоты на себя. Модель войдет в вираж. Контролируйте крен элеронами, не давая ему увеличиваться. После разворота верните руль высоты в нейтральное положение и устраните крен. Теперь закройте дроссельную заслонку двигателя наполовину, – этого должно быть достаточно для горизонтального полета. Повернитесь так, чтобы солнце было у вас за спиной и, выполнив, если необходимо, еще один разворот, выведите модель в зону перед собой. Теперь летайте по базе слева направо, выполняя левые развороты на 180°.
Наступило самое время оценить
свое психологическое состояние. Большинство начинающих испытывают сильное волнение сразу после запуска мотора, остальные – после взлета, когда осознают, что… модель ведет себя совсем не так как представлялось. Страх, вызывающий рефлекторное замедление реакции, становится одной из причин аварий. Поэтому, набрав высоту, попытайтесь расслабиться, продолжая, тем не менее, управлять полетом по базе.
Очевидно, вскоре вы заметите, что модель постоянно крениться в ту или иную сторону или набирает высоту сама по себе. Попросите помощника переместить ручку триммера на несколько щелчков в нужную сторону.
Если помочь некому, делайте это левой рукой, предварительно выровняв модель в горизонтальный полет. После окончания триммирования по высоте и элеронам, вы сразу почувствуете некоторое облегчение, так как модель не будет больше летать “на ручке”.
Во время первых полетов не опускайте самолет ниже 100 м, и не удаляйте его от себя слишком далеко, модель должна быть хорошо видима. В случае потери ориентировки немного отклоните элероны влево (или вправо), и по реакции модели оцените, летит ли к вам или от вас. При управлении особую трудность представляет обратный эффект управления элеронами, когда модель летит на вас.
Здесь поможет такой прием: повернитесь к модели правым плечом и представляйте, что движетесь как бы вместе с моделью.
Альтернативным упражнением для первоначального обучения является полет по кругу вокруг пилота. Однако в этом случае самолет неизбежно будет периодически пролетать с солнечной стороны. Также труднее будет триммировать модель, так как из траектории полета исчезнут прямолинейные участки.
Освоив левые развороты на 180°, отработайте правые. Имейте в виду, что модель отрегулирована на режим 50% мощности двигателя, и при увеличении тяги будет возникать тенденция к набору высоты, а на малом газу – к пологому снижению. Отрабатывайте горизонтальный полет до тех пор, пока не будете чувствовать себя уверенно и непринужденно. Только после этого приступайте к выполнению более сложных фигур.
Посадка
Не дожидаясь, пока кончиться все топливо, приступайте к посадке. Классическим в большой авиации считается заход ” по коробочке”. Но для начала можно поступить проще. Выполните пролет по ветру со снижением. Через 200-300 м разверните модель на 180° и сбросьте газ. Выдерживайте угол планирования, при котором скорость остается неизменной. Модель теперь должна лететь против ветра.
Следующий этап посадки – выравнивание – самый сложный. Нужно точно определить высоту выравнивания, чтобы модель перешла в горизонтальный полет на высоте около 1 м. Боязнь опоздать с выравниванием обычно приводит к высокому выравниванию на высоте 2-3 м.
Пилот “подвешивает” модель, результатом чего становиться парашютирование с грубым приземлением, либо сваливание и удар носовой частью фюзеляжа. Если же самолет долго сохраняет скорость, набранную на планировании, то высокое выравнивание не опасно – достаточно лишь слегка отдать ручку от себя. Модель опять перейдет на планирование.
Заключительный горизонтальный полет с постепенной потерей скорости называется “выдерживание”. Задача его – погасить скорость модели до посадочной.
Если покрытие полосы хорошее, то первые посадки лучше делать с небольшим избытком скорости. Для этого как бы притирайте рулями модель к земле после выравнивания.
Посадка на самолете с двухстоечным шасси сложнее по сравнению стрехстоечным и, одновременно, интереснее. Если посадка выполняется на траву, модель нужно выдерживать на минимальной высоте дольше. После заметного увеличения угла атаки, она начнет парашютировать и в этот момент коснется земли, выполнив “трехточечную” посадку. Если вертикальная и горизонтальная скорости великоваты, модель начнет “козлить” (удар колесами о землю увеличивает угол атаки крыла настолько, что модель опять отрывается от земли).
При повторном снижении модели надо дать руль на себя, чтобы смягчить очередной удар, иначе подскок повторится. Грубые посадки часто приводят к капотированию – опрокидыванию модели через нос; но это редко сопровождается поломками. Если трава высокая, есть шанс скапотировать даже после идеальной посадки, так что особенно не расстраивайтесь по этому поводу. Для уменьшения тенденции к капотированию можно сместить стойки шасси вперед или сделать центровку более задней.
Идеальная посадка с трехстоечным шасси характерна тем, что полосы сначала касаются основные стойки, после чего модель сама опустит переднюю ногу.
Всегда нужно стремиться к тому, чтобы точка приземления модели находилась в пределах хорошей видимости. Но не заходите на посадку строго “на себя”. Траектория движения модели должна пройти от вас не ближе 5 м. Если вы ошиблись с расчетом на посадку, лучше приземлить самолет на большом удалении, не делая разворотов на планировании.
Варианты для более “продвинутых” пилотов: плавно дайте полный газ и уйдите на второй круг или сделайте разворот на планировании. Последний нужно делать с запасом скорости и высоты, так как скорость сваливания модели увеличивается пропорционально углу крена. При этом постоянно помните, что после всех разворотов необходимо сесть против ветра. Если ветер слабый, то, в крайнем случае, можно сесть и по ветру, но ни в коем случае не с боковым.
Полезное упражнение – выполнить заход на посадку и снижение с последующим уходом на второй круг. Так за несколько полетов удастся имитировать десятки посадок, не изнашивая самолет лишними нагрузками. Эффектно смотрится “конвейер” – посадка и последующий взлет без полной остановки модели.
Пилотаж в горизонтальной плоскости
Фигура, часто присутствующие в программе соревнований “свободного класса” – это разворот на 90° и 270°. Сделав разворот на 90°, сразу же переложите крен на другую сторону и развернитесь на 270°. При этом стремитесь к тому, чтобы модель возвращалась к вам по той же прямой, по которой она двигалась до ввода в фигуру.
Вираж, или несколько виражей на 360° – очень характерные фигуры для копий маневренных истребителей.
Трудность заключается в том, чтобы радиус виража и крен были постоянными. При выполнении нескольких виражей легко непреднамеренно набрать или потерять высоту. Делая горизонтальную восьмерку, следите за тем, чтобы виражи имели одинаковый и не слишком маленький радиус. Все эти фигуры лучше выполнять с небольшой скоростью.
Петля Нестерова
Разгоните модель на полном газу и дайте ручку на себя. Сделайте восходящую часть петли, по возможности большего радиуса. В верхней точке сбросьте газ до малого и завершите петлю с тем же радиусом. На выходе не забудьте вернуть ручку газа в нужное положение.
Бочка
Сразу заметим, что на учебном самолете тяжело сделать красивую бочку. Набрав высоту на максимальной скорости, слегка задерите нос модели и почти одновременно полностью дайте элероны в нужную сторону. Когда самолет перевернется на спину, немного дайте руль высоты от себя, выравнивая фюзеляж в горизонтальное положение. Закончите бочку. При выполнении этой фигуры модель стремиться уйти вниз, – нужна высота и готовность парировать тенденцию к пикированию.
Обратная петля
Сразу предупреждаем: лучше не делайте ее на модели с несущим, явно несимметричным профилем крыла. Выполнив нисходящую полупетлю, учебная машина с таким крылом не всегда может “выкарабкаться” наверх. В результате – полет на спине, да еще и с большой потерей высоты. Здесь поможет только резкий возврат с помощью элеронов в нормальный полет. Для моделей же с симметричным профилем обратная петля почти не отличается от прямой.
Иммельман
Набрав скорость, сделайте полупетлю и переверните модель элеронами в нормальный полет. Кстати – это удобный способ сменить направление полета на обратное.
Штопор
Очень интересная и зрелищная фигура. Наберите 150-300 м высоты и сбросьте газ до малого. Выполняйте выдерживание модели, как при посадке, до начала парашютирования. В этот момент полностью дайте рули высоты на себя и направления в желаемую сторону, и затем удерживайте их полностью отклоненными. Модель
должна войти в штопор, вращаясь вокруг одного из концов крыла.
Если при выдерживании самолет самопроизвольно начинает “валиться” в крен с потерей эффективности элеронов, добавьте руль направления в ту же сторону, одновременно взяв руль высоты на себя.
Для выхода из штопора верните ручки в нейтральное положение. Все фирменные и грамотно спроектированные самодельные модели при этом выходят из штопора. Не штопорите слишком низко – как для самого штопора, так и для выхода из него требуются значительные запасы высоты.
Модели с передней центровкой не удается ввести в штопор, – вместо него получается спираль.
Плохо штопорящая модель, сделав несколько витков, разгоняется и также переходит в спираль. Чтобы ваш самолет хорошо штопорил, сделайте центровку более задней. Если и это не помогает, постепенно подрезайте киль, уменьшая его площадь. Иногда, срезав всего 6-7 мм, можно получить желаемый результат. Если самолет штопорит уверенно, то можно сменить направление штопора перекладкой руля направления.
(Автор: Я.Галустов. источник жкрнал Моделизм спорт и хобби)
Управление рулем высоты
Две половины руля высоты механически соединены между собой с помощью трубы. Гидроприводы руля высоты питаются от гидросистем А и В. Подачей гидрожидкости к приводам управляют переключатели в кабине пилотов (Flight Control Switches).
Одной работающей гидросистемы достаточно для нормальной работы руля высоты.
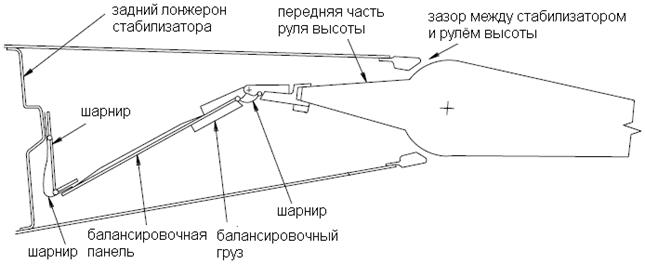
В случае отказа обоих гидросистем (manual reversion) руль высоты отклоняется вручную от любого из штурвалов. Для уменьшения шарнирного момента руль высоты оснащен двумя аэродинамическими сервокомпенсаторами и шестью балансировочными панелями.
Наличие балансировочных панелей приводит к необходимости установки стабилизатора полностью на пикирование (0 units) перед обливом противообледенительной жидкостью. Такая установка предотвращает попадание слякоти и противообледенительной жидкости в воздушные полости балансировочных панелей, поскольку стабилизатор будет иметь положительный угол наклона 4° (передняя кромка выше задней).
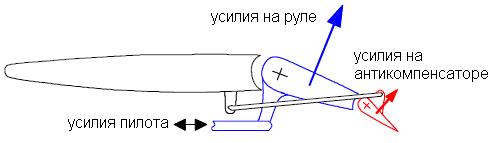
На модификации “NG” аэродинамические сервокомпенсаторы при выпущенных закрылках и наличии давления в гидросистемах перестраиваются на антикомпенсаторы.
Принцип работы сервокомпенсатора и антикомпенсатора см. http://aviacom.ucoz.ru/Principleflight3.doc стр 5, 6

На левой половине руля высоты перестройка осуществляется по команде от FCC. Гидроцилиндр работает от гидросистемы А.
На правой половине – по сигналу датчика положения закрылков с задержкой на 10 секунд.
Гидроцилиндр работает от гидросистемы В.
На фото видно, что при руле высоты, отклонённом на пикирование, сервокомпенсатор на левой половине отклонён вверх (работает как сервокомпенсатор), а на правой половине – отклонён вниз (работает как антикомпенсатор). Это произошло потому, что была включена в работу только гидросистема В.
В AFM (Aircraft Flight Manual) 737-800 написано, что зафиксированы случаи вибрации сервокомпенсатора на приборной скорости более 275 узлов в диапазоне высот от 10000 до 25000 футов, при этом перед полётом производилась процедура удаления льда/противообледенения стабилизатора.
В связи с тем, что сервокомпенсатор может вызвать вибрацию проводки управления (См. Недостатки самолёта №6), то логично было бы выпустить закрылки, поскольку антикомпенсатор не способствует отклонению руля и, соответственно, не должен вызывать вибрацию. Хотя QRH в данном случае рекомендует только плавно уменьшить скорость до прекращения вибрации, не использовать интерцепторы в полёте и произвести посадку на ближайшем аэродроме.
Поскольку руль высоты не имеет аэродинамического триммера и в проводке управления нет механизма триммерного эффекта, то снять усилия с отклонённого штурвала невозможно. Чтобы усилия на штурвале исчезли, его нужно вернуть в нейтральное положение. При этом требуемого изменения в балансировке достигают путём перекладки стабилизатора. На всех установившихся режимах полёта независимо от высоты, скорости и тангажа штурвал всё время находится в приблизительно одном и том же нейтральном положении, которое может немного изменяться в зависимости от положения стабилизатора и работы системы MACH TRIM.
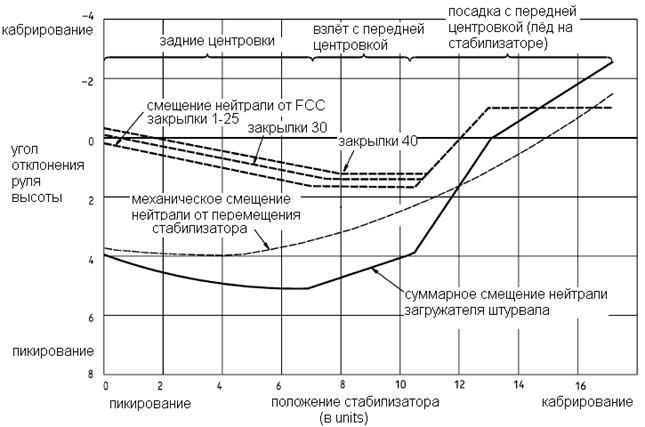
Нейтральное положение руля высоты относительно самолёта меняется в зависимости от положения стабилизатора. Руль высоты как бы «стремится» находиться в одной плоскости со стабилизатором. При работающем рулевом приводе руля высоты это обеспечивается за счёт смещения нейтрали загружателя штурвала, при включенном автопилоте – за счёт отслеживания положения стабилизатора датчиком автопилота и выдаче соответствующей команды на рулевой привод. При перекладке стабилизатора из положения 0 units в положение 17 units, штурвал смещается на 4,3 см на кабрирование, что соответствует перекладке руля высоты около 7°.
При положении стабилизатора 3 units, руль высоты опущен вниз на 4°.
При перекладке стабилизатора на кабрирование до 10 units, руль высоты займёт горизонтальное положение.
При угле стабилизатора 14 units, руль высоты поднимется вверх на 2,75°.
На самолетах модификации “NG” положение нейтрали руля высоты регулируется не только механически смещением нейтрали загружателя, но и электрическим сигналом от компьютера контролирующего управление самолётом FCC (flight control computer). Данный компьютер воздействует на проводку управления рулём высоты через электромеханизм системы MACH TRIM.
Функция смещения нейтрали от FCC работает только при отключенном автопилоте и выпущенных закрылках, когда пилот перекладывает стабилизатор нажатием переключателя на штурвале или меняет положение закрылков.
Положение стабилизатора то 7 до 10,5 units соответствует взлёту с передней центровкой. FCC при этом командует на смещение нейтрали руля высоты ~ 1,5° на пикирование. Стабилизатор в балансировочном положении (при нулевых усилиях на штурвале) при этом будет больше отклонён на кабрирование, что улучшает управляемость на взлёте (увеличивает запас руля высоты на кабрирование).
Поскольку гидравлические приводы руля высоты включены в проводку управления по необратимой схеме, то аэродинамическая нагрузка от рулей на штурвалы не передаётся. Усилия искусственно создаются с помощью загружателя штурвала (feel and centering unit) на который, воздействуют:
– механизм смещения нейтрали (точки нулевых усилий), механически связанный со стабилизатором;
– механизм системы Mach trim system;
– гидравлический имитатор аэродинамической нагрузки (elevator feel computer).
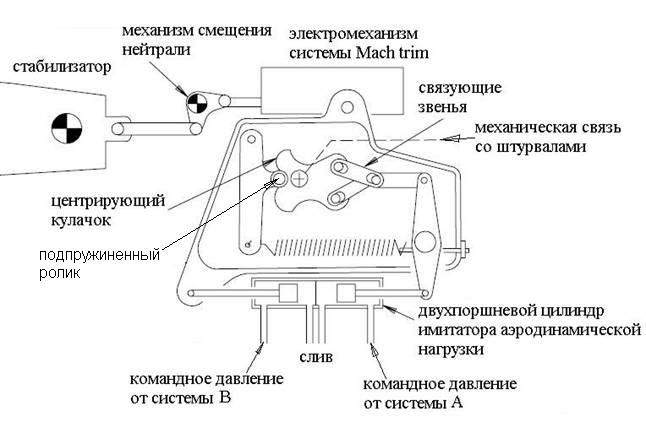
При отклонении штурвала поворачивается центрирующий кулачок, при этом подпружиненный ролик выходит из своей «ямки» на боковую поверхность кулачка. Стремясь под действием пружины вернуться обратно, он создает усилие в поводке управления, препятствующее отклонению штурвала. Кроме пружины на ролик воздействует исполнительный механизм имитатора аэродинамической нагрузки (elevator feel computer). Чем больше командное давление, тем сильнее ролик будет прижиматься к кулачку, что будет имитировать возрастание скоростного напора. Особенностью двухпоршневого цилиндра является то, что он воздействует на загружатель штурвала максимальным из двух командных давлений. Это легко понять по рисунку, поскольку между поршнями давления нет, и цилиндр будет находиться в нарисованном состоянии только при одинаковых командных давлениях. Если же одно из давлений станет больше, то цилиндр сместится в сторону большего давления, пока один из поршней не упрется в механическую преграду, исключив, таким образом, цилиндр с меньшим давлением из работы.
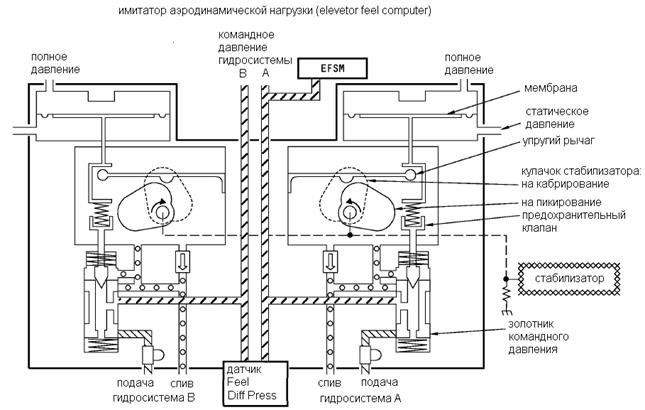
На вход elevator feel computer поступает скорость полета (от приемников воздушного давления, установленных на киле) и положение стабилизатора.
Под действием разности полного и статического давлений мембрана (q diaphragm) прогибается вниз, смещая золотник командного давления. Чем больше скорость, тем больше командное давление.
Изменение положения стабилизатора передается на кулачок стабилизатора, который через упругий рычаг ограничивает опускание мембраны и, соответственно, рост командного давления. Чем больше стабилизатор отклонен на кабрирование, тем меньше максимальное командное давление.
Предохранительный клапан предназначен для защиты от чрезмерного увеличения командного давления.
Таким образом гидравлическое давление из гидросистем А и В 3000 psi (210 атм.) преобразуется в соответствующее командное давление 200 – 2100 psi (от 14 до 150 атм.), воздействующее на загружатель штурвала. На NG диапазон командных давлений 180 -1400 psi.
Если, при убранных закрылках, разница в командных давлениях становится более 25%, то пилотам выдается сигнал FEEL DIFF PRESS. Эта ситуация возможна при отказе одной из гидросистем или одной из веток приемников воздушного давления. Никаких действий от экипажа не требуется, поскольку система продолжает нормально функционировать.
На самолётах модификации NG к каналу командного давления от гидросистемы А подключен модуль создания дополнительного давления EFSM (elevator feel shift module). Он выдаёт давление 850 psi когда включается в работу система предупреждения о приближении сваливания самолёта.
Система предупреждения о приближении сваливания самолёта
На штурвалах самолёта установлены механизмы тряски штурвала, которые обеспечивают тактильное и звуковое предупреждение пилотам о приближающемся сваливании.
Система состоит из двух независимых компьютеров с датчиками информации. Один компьютер выдаёт команду на включение механизма тряски штурвала командира, а второй – штурвала второго пилота.
Система включается, когда датчик AIR – GROUND на правой стойке покажет, что самолёт находится в воздухе, или скорость самолёта станет больше 160 узлов.
Система выключается, когда вышеупомянутый датчик покажет, что самолёт находится на земле, или же скорость самолёта уменьшится менее 60 узлов.
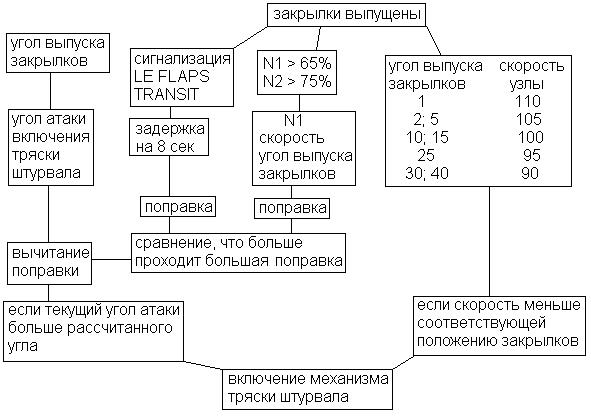
При расчёте момента включения механизма тряски используются четыре алгоритма:
– normal stall warning (сравнение α текущего и α включения механизма тряски)
– asymmetry stall warning (поправка на положение предкрылков)
– high thrust stall warning (поправка на тягу двигателей)
– speed floor stall warning (включение тряски независимо от угла атаки при падении скорости).
В первом алгоритме анализируется текущий угол отклонения закрылков (trailing edge flaps). Каждой позиции закрылков соответствует свой угол атаки включения тряски штурвала. Если текущий угол атаки превышает установленный предел, то выдаётся команда на включение тряски штурвала.
Второй и третий алгоритм включаются при выпущенных закрылках.
Второй алгоритм отслеживает загорание сигнализации LE FLAPS TRANSIT. Через 8 секунд после её появления (для исключения ложных срабатываний при выпуске-уборке предкрылков), выдаётся команда на первый алгоритм на понижение границы включения сигнализации. То есть компьютер считает, что сваливание начнётся на меньшем угле атаки и соответственно включит сигнализацию.
Третий алгоритм следит за режимом двигателей и скоростью полёта. Если N1>65%, N2>75%, то в зависимости текущих N1 и скорости полёта рассчитывается CTG (coefficient of thrust gradient) и, соответственно, выдаётся команда на первый алгоритм на понижение границы включения сигнализации. При этом команды от второго и третьего алгоритмов сравниваются и на выходе остаётся та, что больше по величине. Физический смысл третьего алгоритма – двигатели на повышенных режимах работы создают дестабилизирующий кабрирующий момент, способствующий попаданию самолёта в сваливание.
Четвёртый алгоритм анализирует только угол выпуска закрылков и текущую скорость полёта (таблица соответствия на рисунке). Когда скорость падает менее табличного значения, тряска штурвала включается независимо от угла атаки.
Информацию о текущем угле атаки система получает с датчиков угла атаки, расположенных справа и слева носовой части самолёта.
Также эти компьютеры рассчитывают и выдают на индикацию две скорости, обозначенные на линейке скоростей пилотажного индикатора. Большая из этих скоростей обозначается вершиной столбика янтарного цвета (цифра 8 на рисунке). Это минимальная скорость маневрирования (minimum maneuver speed). Она рассчитывается по текущему углу атаки и скорости самолёта. При полёте на данной скорости механизм тряски штурвала сработает при перегрузке 1.3 (см. уточняющий текст ниже). При изменении текущей нормальной перегрузки вершина янтарного столбика не перемещается по линейке скоростей.
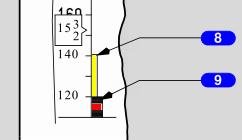
Меньшая скорость обозначается вершиной красно-чёрного полосатого столбика и обозначает расчётную скорость начала срабатывания механизма тряски штурвала (цифра 9 на рисунке). В расчёте этой скорости участвует, в том числе, и текущая нормальная перегрузка (stick shaker speed), то есть при увеличении перегрузки красно-чёрный столбик ползёт вверх. Фактическое сваливание самолёта должно произойти на скорости меньшей, чем индицируемая скорость включения тряски штурвала.
Логика расчёта минимальной скорости маневрирования (вершина янтарного столбика) меняется в зависимости от положения закрылков.
При выпущенных закрылках (максимальная высота полёта 20000 футов) обеспечивается запас по перегрузке 0.3 до включения механизма тряски штурвала. Данный запас обеспечивает выполнение горизонтального разворота с креном 40° и обеспечивает «полные маневренные возможности самолёта» (full maneuver capability).
При убранных закрылках этот запас обеспечивается только на высотах ниже 10000 футов. В диапазоне высот 10000 – 20000 футов он уменьшается из-за влияния растущего числа М. Но не ниже 0.155, что соответствует горизонтальному развороту с креном 30° и обеспечивает «достаточные маневренные возможности самолёта» (adequate maneuver capability).
Выше 20000 футов вершина янтарного столбика показывает запас до начала аэродинамической тряски (low speed buffet), а не до начала тряски штурвала. Причем величину запаса можно установить предварительным программированием FMC в диапазоне 0.15 ÷ 0.65 для классики и 0.2 ÷ 0.6 для NG (по умолчанию Боинг устанавливает запас 0.3).
Чтобы узнать, какой запас установлен на конкретном самолёте нужно на земле открыть страницу INDEX зайти в MAINT открыть FMCS выбрать PERFORM FACTOR. Данный запас будет индицироваться в строке MANEUV FACTOR (он пишется с единицей, т.е. запас 0.3 обозначается 1.3)
На некоторых «классических» самолётах SMC (Stall Management Computer) дополнительно рассчитывает flaps up maneuvering speed (зелёный кружочек), minimum flap retraction speed (зелёная буква F), high speed buffet (дно верхнего янтарного столбика, цифра 15 на рисунке) и maximum operating speed (дно верхнего красно-чёрного столбика, цифра 14).
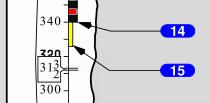
На самолетах модификации NG, кроме этого, рассчитывается рекомендуемая скорость для пилотирования при заходе на посадку и после взлёта (flap maneuvering speed, цифра 2 на рисунке). Данная скорость обозначается символом UP или цифрой, обозначающей угол выпуска закрылков. Эта скорость рассчитывается FMC по текущему весу самолёта и обеспечивает, как минимум, координированный разворот с креном 40 (то есть нормальную перегрузку 1.3) до срабатывания механизма тряски штурвала при полёте на небольшой высоте. При увеличении высоты данный запас может не обеспечиваться.

В нормальных условиях рекомендуемая скорость всегда будет больше минимальной скорости маневрирования, но при отказах механизации крыла может стать меньше.
Компьютер системы предупреждения о сваливании также рассчитывает угол тангажа, при достижении которого, будет достигнут угол атаки тряски штурвала (PLI pitch limit indicator). Данный символ индицируется на пилотажном приборе только при выпущенных закрылках.
Также данная система даёт команду в систему выпуска предкрылков на автоматический довыпуск выдвижных предкрылков при приближении к сваливанию (autoslat system). Команда выдаётся на угле атаки меньшем, чем угол атаки тряски штурвала. На классике данная система работает в диапазоне углов выпуска закрылков 1 – 5 градусов, а на NG – в диапазоне 1 – 25 градусов.
Кроме рассмотренных функций, на самолётах модификации NG предусмотрена активная помощь пилоту по выходу из сваливания. Когда компьютер системы предупреждения сваливания определяет, что самолёт находится на режиме сваливания (stall ID), то он выдаёт сигнал в систему управления самолётом (FCC), которая перекладывает стабилизатор на пикирование. Чтобы пилот не смог легко парировать данный пикирующий момент взятием штурвала на себя, включается модуль EFSM (Elevator Feel Shift Module), подающий дополнительное командное давление на загружатель штурвала. При этом градиент усилий на угол отклонения штурвала увеличивается почти в четыре раза. Условия срабатывания модуля EFSM: включился механизм тряски штурвала и после этого угол атаки увеличился ещё на 8 – 11°, а также нет запрещения для работы модуля из-за малой высоты полёта (100 футов).
Система улучшения устойчивости по скорости на больших числах М
(Mach Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS).
Система MACH TRIM обеспечивает устойчивость по скорости при числе М более 0,615. При увеличении числа М электромеханизм MACH TRIM ACTUATOR смещает нейтраль загружателя штурвала (feel and centering unit) и руль высоты автоматически отклоняется на кабрирование, компенсируя пикирующий момент от смещения аэродинамического фокуса вперед. При этом на штурвал никакие перемещения не передаются. Подключение и отключение системы происходит автоматически в функции числа М.
Система получает число М от Air Data Computer. Система двухканальная. При отказе одного канала индицируется MACH TRIM FAIL при нажатии Master Caution и гаснет после Reset. При двойном отказе система не работает и сигнал не гасится. На классике необходимо выдерживать число М не более 0.74, на NG – IAS не более 280 узлов, число М не более 0.82.
§
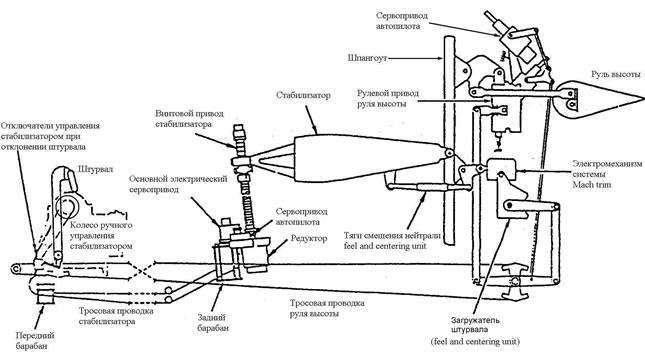
Стабилизатор управляется электродвигателями триммирования: один из них управляется вручную от переключателей на штурвалах, второй – от автопилота. На NG электродвигатель один, а управляется он от штурвала или автопилотом по независимым каналам.
Также обеспечена механическая связь со стабилизатором с помощью колеса управления и тросовой проводки. На случай заклинивания любого из электродвигателей предусмотрена муфта, разъединяющая проводку управления стабилизатором от электродвигателей. Чтобы сработала муфта, надо приложить усилие к колесу управления и сделать примерно пол-оборота.
Полный ход стабилизатора 0 – 17 units (-0.2 – 16.9 на NG). Он возможен только от механической системы управления.
Диапазон работы автопилота ограничен 0,25 – 14 units (0.05 – 14.5 на NG).
Управление от переключателей на штурвале еще более ограничено: 0,25 – 12,5 (0.05 – 14.5 на NG) при выпущенных закрылках и 2,5 – 12,5 (3.95 – 14.5 на NG) при убранных.
Диапазон 2 – 6,9 units (Green band) соответствует эксплуатационному диапазону центровок, соответственно 30% – 5% САХ. На NG этот диапазон 2,65 – 8,5 units, соответственно для центровок 36% – 6% САХ. При положении стабилизатора вне данного диапазона при переводе РУД на взлетный режим будет звучать прерывистый звуковой сигнал (Takeoff configuration warning).
Управление электродвигателем ручного триммирования выполняется от нажимных переключателей на штурвалах пилотов. Один из переключателей отвечает за направление триммирования, а второй включает питание электродвигателя.
Нажатие этих переключателей при подключенном автопилоте приводит к его отключению.
При отклонении штурвальной колонки от нейтрали срабатывают выключатели, прерывающие цепь управления стабилизатором в сторону противоположную отклонению. Например, при взятии штурвала на себя невозможно отклонить стабилизатор на пикирование. Чтобы отключить данное ограничение на центральном пульте есть выключатель «OVERRIDE». Его нужно использовать при заклинении проводки рулём высоты, чтобы управлять самолётом по тангажу с помощью только одного стабилизатора.
Скорость перекладки стабилизатора зависит от положения закрылков – при их выпуске увеличивается в три раза.
Автопилот управляет стабилизатором с помощью сервопривода автопилота. Скорость перекладки также зависит от положения закрылков. При выпущенных закрылках она равна скорости ручной перекладки с убранными закрылками, а при убранных – в два раза меньше.
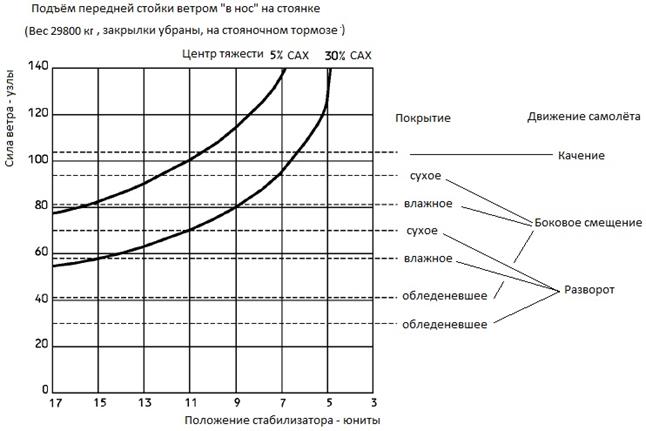
При постановке самолёта на стоянку на длительный период следует стабилизатор отработать полностью на пикирование. В зимний период это связано с предотвращением затекания противообледенительной жидкости и растаявшего снега/слякоти в полости балансировочных панелей руля высоты. В остальной период это имеет смысл для предотвращения подъёма передней стойки самолёта на стоянке от порыва встречного ветра (особенно пустого, незаправленого самолёта).
Ниже приведён график зависимости силы ветра, способного опрокинуть самолёт на хвост в зависимости от положения стабилизатора, а также пунктирными линиями показана сила ветра, приводящая к смещению самолёта.
Система улучшения устойчивости по скорости на малых скоростях
(Speed Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS) и работает только при отключенном автопилоте.
Система управляет стабилизатором с помощью сервопривода автопилота для обеспечения устойчивости по скорости. Её срабатывание возможно вскоре после взлета или при уходе на второй круг. Условиями, способствующими срабатыванию, являются малый вес, задняя центровка и высокий режим работы двигателей.
См. ( http://aviacom.ucoz.ru/Principleflight2.doc ) стр. 17-18, 23
Система улучшения устойчивости по скорости применяется в области полетов на скоростях 90 – 250 узлов. Если компьютер улавливает изменение скорости, то система автоматически включается при выпущенных закрылках (на 400/500 независимо от закрылков), оборотах двигателей N1 более 60%. При этом должно пройти более 5 секунд после предыдущего ручного триммирования и не менее 10 секунд после отрыва от ВПП.
Принцип работы заключается в перекладывании стабилизатора в зависимости от изменения скорости самолета, таким образом, чтобы при разгоне самолет имел тенденцию к задиранию носа и наоборот. (При разгоне 90 – 250 узлов стабилизатор автоматически перекладывается на 8 градусов на кабрирование). Кроме изменений скорости компьютер учитывает обороты двигателей, вертикальную скорость и приближение к сваливанию. Чем выше режим двигателей, тем быстрее начнет срабатывать система. Чем больше вертикальная скорость набора высоты, тем больше стабилизатор отрабатывает на пикирование. При приближении к углам сваливания система автоматически отключается.
При торможении самолёта стабилизатор автоматически перекладывается на пикирование.
Система двухканальная. При отказе одного канала полет разрешается. При двойном отказе вылетать нельзя. Если двойной отказ произошел в полете, QRH не требует никаких действий, но логично было бы повысить контроль за скоростью на этапах захода на посадку и ухода на второй круг.
21 мая 2009 года AAIB (Air Accidents Investigation Branch) – бюро расследований происшествий на авиационном транспорте Великобритании опубликовало отчет о расследовании инцидента с Боингом 737-300 авиакомпании Thomsonfly, произошедшего в Bournemouth (Великобритания) 23 сентября 2007 года.
Согласно отчета, самолет при заходе на посадку потерял скорость до 82 узлов (20 узлов менее VREF), вышел на режим сваливания. Экипаж при выводе самолета из сваливания вывели двигатели на режим превышающий полную взлетную мощность. При этом, кабрирующий момент от двигателей был так велик, что для его парирования не хватило полной отдачи штурвальной колонки от себя и тангаж самолета увеличился до 44 градусов.
AAIB подчеркнуло в своем отчете, что в QRH (Quick Reference Handbook) не отражен тот факт, что для вывода самолета из сваливания может потребоваться использование стабилизатора для противодействия кабрирующему моменту двигателей и что экипажи должны быть предупреждены об этом.
Путевое управление
Путевое управление самолетом обеспечивается рулем направления. Перемещения педалей управления по тросовой проводке передаются на вертикально расположенную трубу (torque tube) в киле самолета. Вращение этой трубы через тяги связи передается на главный рулевой привод (main PCU) и резервный рулевой привод (standby PCU). К этой же трубе снизу прикреплен загружатель педалей (feel and centering unit), который имитирует аэродинамическую нагрузку на педалях и обеспечивает фиксированное положение руля направления при работе рулевого привода.
На руле отсутствует сервокомпенсатор, то есть отклонять руль направления в полете мускульным усилием практически невозможно.
Главный рулевой привод работает от гидросистем А и В. Резервный привод питается от резервной (standby) гидросистемы. Работа любой из трех гидросистем полностью обеспечивает путевое управление.
В главный рулевой привод встроен исполнительный механизм демпфера рысканья. (см. Боковая устойчивость и управляемость.) Он запитан от гидросистемы В.
Триммирование руля направления с помощью ручки на центральном пульте осуществляется смещением нейтрали механизма триммерного эффекта. Там же находится шкала с указателем отклонения руля направления в units.
На самолетах серии 300-500 производилась модификация схемы управления рулем направления (RSEP modification). RSEP –Rudder System Enhancement Program. Внешний признак выполнения данной модификации – дополнительное табло «STBY RUD ON» в левом верхнем углу панели FLIGHT CONTROL.
Модификация должна быть выполнена на всех самолетах до ноября 2008 года. Причиной явились две катастрофы и инцидент, в которых предположительной причиной назван отказ рулевого привода руля направления.
Первая катастрофа произошла 3 марта 1991 года с Боингом 737-200 в районе города Colorado Springs в США. (Источник информации: NATIONAL TRANSPORTATION SAFETY BOARD
WASHINGTON, D.C. 20594 AIRCRAFT ACCIDENT REPORT)
За 6 дней до катастрофы на этом самолете в полете возникло правое скольжение, которое экипаж устранил, выключив демпфер рыскания. Техсостав провел работы по демпферу, но скольжение повторилось через два дня снова. Опять демпфер был выключен и на земле были выполнены работы. В дальнейших полетах, вплоть до катастрофы, замечаний не было.
3 марта в 9.37 утра второй пилот доложила, что полосу наблюдает, и получила разрешение на визуальный заход на полосу 35. Ветер был 320 градусов 16 порывы 29 узлов. Также диспетчер доложил, что предшествующий борт докладывал о сдвиге ветра на глиссаде.
В 9.41 диспетчер дал команду после посадки не пересекать полосу 30, которая занята взлетающими бортами. Второй пилот подтвердила прием информации. Это была последняя передача экипажа.
В процессе разворота на посадочный с креном 20 градусов второй пилот доложила «1000 футов». В последующие 4 секунды темп разворота резко усилился. Она сказала «О, бог», тяга двигателей стала возрастать, поступила команда командира «Закрылки 15», что говорило о попытке уйти на второй круг.
Тем не менее, вращение продолжалось, скорость выросла до 200 узлов и перегрузка до 4. При столкновении самолет пикировал с углом тангажа 80 градусов.
Вторая катастрофа произошла 8 сентября 1994 года с Боингом 737-300 в районе города Aliquippa в США.
Инцидент произошел 9 июня 1996 года в районе города Richmond в США.
Предположительной причиной этих происшествий был самопроизвольный уход руля направления в крайнее положение. Это приводило к неконтролируемому кренению самолёта.
Главный рулевой привод руля направления до модификации RSEP имел двойной золотник (внутренний и внешний). Если они были слишком плотно подогнаны и имели значительное трение между собой, а пилот, по каким – либо причинам, допускал резкое движение педалями, то золотник мог уйти в крайнее положение и, соответственно, открыть путь гидрожидкости к полному неконтролируемому отклонению руля.
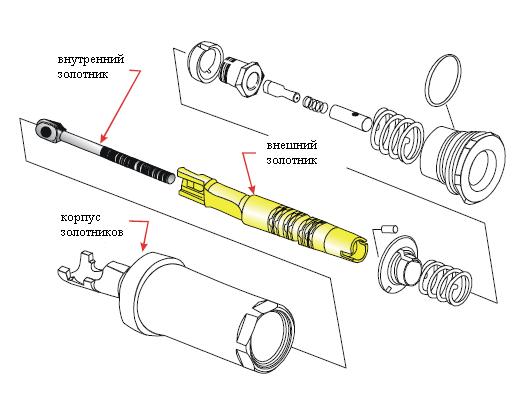
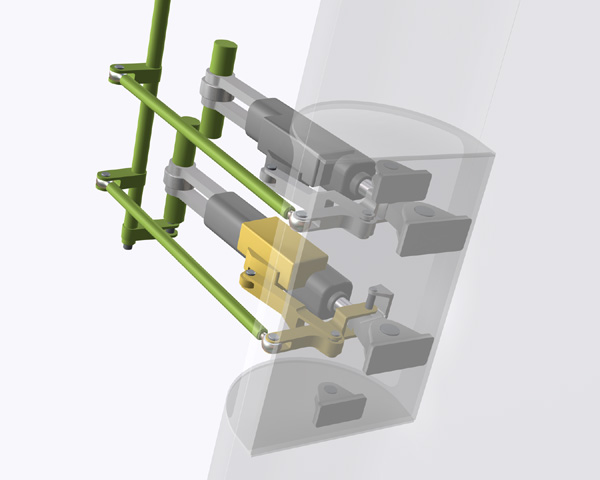
После модификации RSEP в главном рулевом приводе руля направления стало два независимых золотника, работающих от системы А и В. Соответственно к каждому из них подходит независимый рычаг управления. См. рисунки: вверху до модификации, внизу – после.
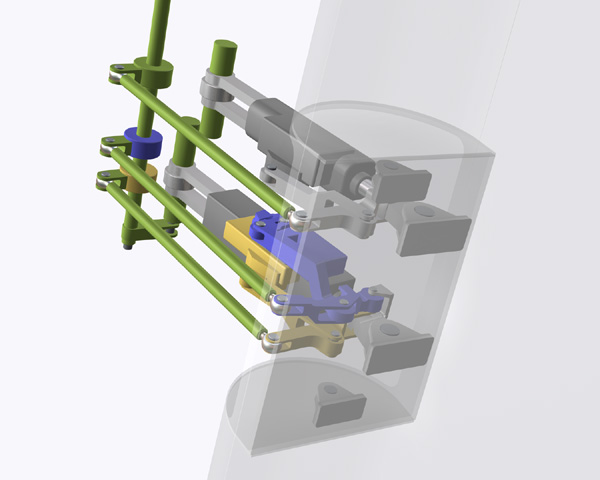
Поскольку сейчас на одном рулевом приводе появилось два независимых входа при фактически одном выходе, то появилась возможность возникновения усилий внутри рулевого привода. За этой ситуацией следит датчик внутренних усилий FFM (force fight monitor), который сразу же включает арбитра – резервную гидросистему с резервным рулевым приводом руля направления. Резервный рулевой привод помогает исправному каналу перебороть отказавший. В кабине пилотов при этом загораются сигналы: “Master Caution” с “FLT CONT” и на верхнем пульте – лампа “STBY RUD ON”. Согласно QRH от пилотов в этом случае требуется избегать больших или резких движений педалями.
Поскольку полное отклонение руля высоты может потребоваться только на этапах взлёта, посадки и ухода на второй круг для парирования разворачивающего момента при отказе двигателя, а на остальных этапах полёта это не нужно и даже опасно, то в системе управления рулём направления предусмотрено ограничение давления подаваемой гидрожидкости.
На «классике» это ограничение включается при наборе высоты более 1000 футов и отключается при снижении ниже 700 футов. На «NG» это происходит, соответственно, при разгоне скорости более 135 узлов и при торможении менее 135 узлов. У пилотов нет ни какой индикации работы системы ограничения давления, за исключением – на «классике», если в гидросистеме А прошла команда на увеличение давления, а оно не увеличилось, то загорается лампа “LOW PRESSURE” на пульте FLT CONTROL «A».
Система связи штурвального колеса с рулём направления
На самолётах модификации «NG» установлена новая система, автоматически отклоняющая руль направления при отклонении командирского штурвального колеса по крену WTRIS (wheel to rudder interconnect system). Данная система включается в работу, когда оба переключателя FLT CONTROL находятся в положении STB RUD и включен YAW DAMPER, то есть когда самолёт управляется вручную мускульными усилиями пилотов. При этом резервный рулевой привод отклоняет руль направления для облегчения управления самолётом по крену.
Система WTRIS работает только при числе М менее 0,4. В промежутке чисел М от 0,3 до 0,4 эффективность системы уменьшается от 1 до нуля. Максимальный угол отклонения руля направления от системы WTRIS: 2° – закрылки убраны, 2,5° – закрылки выпущены.
§
Механизация крыла состоит из механизации передней кромки (leading edge devices), закрылков и интерцепторов.
Механизация передней кромки состоит из 4-х секционных отклоняемых предкрылков Крюгера (flaps) и 6-ти секционных выдвижных щелевых предкрылков (slats). По две секции предкрылков Крюгера расположены между фюзеляжем и мотогондолой и по 3 секции выдвижных предкрылков на оставшейся части передней кромки крыла. Предкрылки Крюгера (Krueger flaps) отклоняются поворотом части передней кромки вперед-вниз и не имеют промежуточных положений в процессе выпуска. Выдвижные предкрылки выпускаются перемещением части передней кромки вперед с образованием щели и имеют два фиксированных выпущенных положения (EXTEND) и (FULL EXTEND).
Менее эффективные предкрылки Крюгера установлены в корневой части крыла для организации первоначального срыва потока в районе центроплана (при выпущенной механизации).
Закрылки 4-х секционные щелевые. Имеют фиксированные углы выпуска 1, 2, 5 ,10, 15, 25 , 30 и 40 градусов. На «классике» закрылки трёхщелевые (см. рисунок внизу).
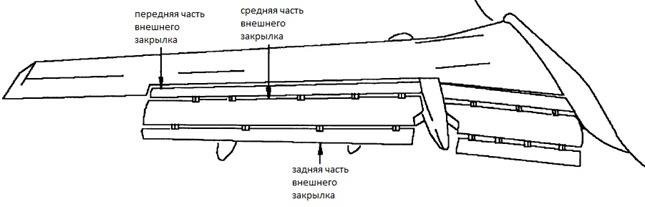
На «NG» закрылки двухщелевые, причём задняя щель не распространяется на весь размах закрылков (см. рисунок внизу).
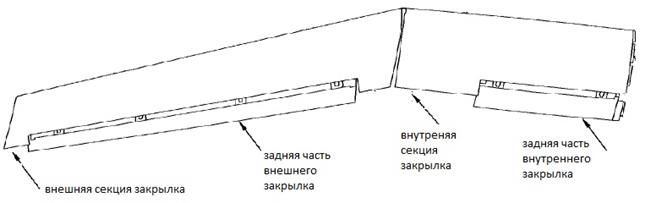
Расположение рулевых поверхностей и механизации крыла на «классическом» самолёте.

Предкрылки и закрылки при выпуске значительно увеличивают подъемную силу крыла за счет увеличения длины хорды и кривизны профиля, таким образом, уменьшая скорость захода на посадку и увеличивая маневренные возможности самолета. Выпуск закрылков до 15 увеличивает подъемную силу при относительно малом увеличении сопротивления, при дальнейшем выпуске закрылков сопротивление возрастает значительно быстрее роста подъемной силы.
Система автоматического довыпуска выдвижных предкрылков (auto slat system) улучшает характеристики самолета на больших углах атаки на взлете и заходе на посадку. При отклоненных закрылках на угол 1 – 5 градусов выдвижные предкрылки находятся в промежуточном (EXTEND) положении. Когда угол атаки крыла приближается к сваливанию, выдвижные предкрылки автоматически довыпускаются полностью (FULL EXTEND) прежде, чем сработает предупреждающая тряска штурвала. После уменьшения угла атаки предкрылки возвращаются в исходное положение.
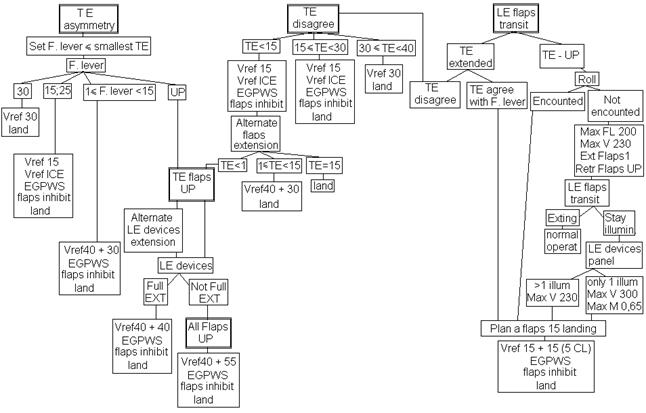
Алгоритм решения проблем с механизацией крыла:
Система управления интерцепторами
На «классике» интерцепторы 10-ти секционные, пронумерованы то 0 до 9 слева направо. Из них 6 секций: 0; 1; 4; 5; 8 и 9 – тормозные интерцепторы (Ground spoilers), отклоняются только на земле для уменьшения длины пробега или прерванного взлета. Четыре секции: 2; 3; 6 и 7 интерцепторы-элероны (Flight spoilers), работают постоянно для управления по крену и коррекции траектории полета.
На “NG” 12 секций интерцепторов, пронумерованы от 1 до 12 слева направо. 1; 6; 7 и 12 секции – Ground spoilers, остальные – Flight spoilers.
Секции интерцепторов-элеронов запитаны симметрично от гидросистем А и В. Поэтому при отказе одной из них эффективность интерцепторов в управлении самолётом по крену уменьшается в два раза.
Секции тормозных интерцепторов запитаны от гидросистемы А. Этим объясняется парадокс, что при отказе гидросистемы А и посадочных закрылках 40 потребная посадочная дистанция больше, чем при отказе гидросистемы В и посадочных закрылках 15.
Принцип работы, преимущества и недостатки интерцепторов см. http://aviacom.ucoz.ru/Principleflight3.doc стр.14 – 16
Управление интерцепторами осуществляется от рукоятки SPEED BRAKE в режиме торможения (симметрично) и от штурвальных колёс – в режиме управления по крену (асимметрично).
При отклонении рукоятки SPEED BRAKE на земле поднимаются все интерцепторы, в полёте – только интерцепторы-элероны.
При отклонении штурвального колеса интерцепторы-элероны на полукрыле с поднятым элероном поднимаются. Интерцепторы-элероны на противоположном полукрыле остаются прижатым к крылу. Таким образом, создаётся кренящий момент в помощь элеронам.
Если при этом рукоятка SPEED BRAKE была отклонена, то на полукрыле с опущенным элероном интерцепторы-элероны приподнимутся ещё выше, а на другом полукрыле выпущенные интерцепторы-элероны немного опустятся. Поскольку в данном случае интерцепторы-элероны изначально приподняты над крылом и находятся вне зоны пограничного слоя, то их эффективность в создании кренящего момента повысится. Боинг предупреждает, что следует избегать маневрирования по крену с выпущенными (особенно в промежуточном положении) интерцепторами, поскольку реакция самолёта на отклонение штурвальной колонки существенно увеличивается и возможно непроизвольное создание большого угла крена (FCTM, глава Descent, раздел Speedbrakes).
Для уменьшения этого недостатка предназначено устройство изменения передаточного коэффициента (spoiler ratio changer) в системе управления интерцепторами-элеронами. Чем выше поднят рычаг SPEED BRAKE, тем меньше коэффициент передачи от штурвального колеса на интерцепторы.
На «классике», с установленными winglets, работает система уменьшения нагрузки на крыло (Load Alleviation System). Если приборная скорость больше 320 узлов и вес самолёта больше 56,7 т, то рычаг SPEED BRAKE автоматически убирается в положение 50% (если был отклонён на больший угол). Пилот может пересилить данную систему, приложив к рычагу дополнительное усилие. При скорости менее 315 узлов и/или весе менее 56,2 т данная система отключается.
На посадке работает система автоматического выпуска интерцепторов. Условия работы: рычаг SPEED BRAKE находится в положении ARM, рычаги обоих двигателей убраны на малый газ и колёса основных стоек шасси раскручены до скорости превышающей 60 узлов. При этом одновременно поднимаются все интерцепторы-элероны и отклоняется рычаг SPEED BRAKE.
Когда обожмётся амортизатор правой стойки шасси, то механически откроется перепускной клапан (bypass valve) тормозных интерцепторов и они также поднимутся. Выпуск интерцепторов-элеронов по раскрутке колёс можно иногда почувствовать при очень мягкой посадке, когда после касания ВПП самолёт вдруг энергично проседает.
Выпуск интерцепторов по раскрутке колёс дублируется системой «земля/воздух», которая выпустит интерцепторы при переходе в режим «земля».
При прерванном взлёте (переключателе autobrake в положении RTO), все интерцепторы поднимутся автоматически (рычаг SPEED BRAKE находится в положении OFF) при следующих условиях: колёса основных шасси раскручены до скорости превышающей 60 узлов, рычаги обоих двигателей убраны на малый газ и переведены в положение реверса тяги. На “NG” это произойдёт также и во время посадки.
Если во время посадки или прерванного взлёта, какой либо рычаг управления двигателем будет переведён на увеличение прямой тяги, то все интерцепторы автоматически убираются и рычаг SPEED BRAKE переместится в положение OFF. Таким образом, можно выполнять прерванную посадку (взлёт с конвейера) пока рычаги двигателей не переведены на реверс тяги. После включения реверса Боинг обязывает экипаж продолжить выполнение посадки.
В таблице собраны отличия в логике работы интерцепторов на NG и classic:
| NG | classic |
| Сигнализация «SPEEDBRAKES EXTENDED» В воздухе – закрылки выпущены ≥ 15º и/или высота по радиовысотомеру ˂ 800 футов. На земле при опущенном рычаге есть давление в системе тормозных интерцепторов. Не взлетать! | |
| Перемещение рычага «speed brakes» за пределы «flight detent» в полёте | |
| запрещено | не рекомендуется |
| Специальный стопор не позволяет при убранных закрылках сдвинуть рычаг «speed brakes» за пределы «flight detent». Поэтому при посадке с убранными закрылками интерцепторы не поднимутся на полный ход. (только на самолётах с опцией улучшенных взлётно-посадочных характеристик*) | |
| На самолётах с установленными законцовками крыльев работает «Load Alleviation System» | |
| Условия работы «auto speed brake» | |
| Для работы системы необходим сигнал от радиовысотомера, что высота менее 10 футов Также «auto speed brake» будет работать при рычаге «speed brakes» в положении «DOWN» и поднятых рычагах реверса двигателей | |
| Условия подъёма интерцепторов-элеронов при работе «auto speed brake» | |
| Обжатие любой стойки шасси | Раскрутка колёс основных стоек ˃ 60 узлов, если нет сигнала раскрутки, то по обжатию шасси |
*- NG могут иметь опцию улучшенных взлётно-посадочных характеристик. При этом увеличиваются максимальные углы отклонения интерцепторов-элеронов от 33/38º до 56/65º, а тормозных интерцепторов от 52/60º до 60/60º.
§
Номенклатура скоростей, используемых в руководствах Боинг:
– Приборная скорость (Indicated или IAS) – показание указателя воздушной скорости без учёта поправок.
– Индикаторная земная скорость (Calibrated или CAS). Индикаторную земную скорость получают из приборной скорости путём внесения аэродинамической и инструментальной поправок.
– Индикаторная скорость (Equivalent или EAS). Индикаторную скорость получают из индикаторной земной скорости путём внесения поправки на сжимаемость воздуха.
– Истинная скорость (True или TAS). Истинную скорость получают из индикаторной скорости путём внесения поправки на плотность воздуха.
Пояснения к скоростям начнем в обратном порядке.
Истинная скорость самолета – это его скорость относительно воздуха. Измерение воздушной скорости на самолете осуществляется с помощью приемников воздушного давления (ПВД). В них замеряется полное давление заторможенного потока р* (pitot) и статическое давление р (static). Предположим, что ПВД на самолете – идеальное и не вносит никаких погрешностей и, что воздух несжимаем. Тогда прибор, измеряющий разность полученных давлений, измерит скоростной напор воздуха р* – р = r*V2/2. Скоростной напор зависит как от истинной скорости V, так и от плотности воздуха r. Поскольку градуировка шкалы прибора производится в земных условиях при стандартной плотности, то в этих условиях прибор будет показывать истинную скорость. Во всех остальных случаях прибор будет показывать отвлечённую величину, называемую индикаторной скоростью Vi = VÖr/rстандарт = VÖD.
Индикаторная скорость Vi играет важную роль не только как величина, необходимая для определения воздушной скорости. В горизонтальном установившемся полете при заданной массе самолета она однозначно определяет его угол атаки и коэффициент подъемной силы.
Учитывая, что при скоростях полета более 100 км/час начинает проявляться сжимаемость воздуха, реальная разница давлений, замеренная прибором, будет несколько больше. Данная величина будет называться земной индикаторной скоростью Viз (calibrated Vc).
Разность Vi-Viз называется поправкой на сжимаемость и увеличивается по мере роста высоты и скорости полета.
Летящий самолет искажает статическое давление вокруг себя. В зависимости от точки установки приемника давления прибор будет замерять несколько разные статические давления. Полное давление практически не искажается. Поправка на расположение точки замера статического давления называется аэродинамической (correction for static source position). Также возможна инструментальная поправка на отличие данного прибора от стандарта (у Боинга принята равной нулю). Таким образом, величина, показанная реальным прибором, подключенным к реальному ПВД, называется приборной скоростью (indicated).
На совмещенных указателях скорости и числа М индицируется земная индикаторная (calibrated) скорость от компьютера высотно-скоростных параметров (Air data computer). На комбинированном указателе скорости и высоты индицируется приборная (indicated) скорость, полученная по давлениям, взятым непосредственно из ПВД.
Рассмотрим типичные неисправности, связанные с ПВД.
Обычно экипаж распознает проблемы в процессе взлета или вскоре после отрыва от земли.
В большинстве случаев это проблемы, связанные с замерзанием воды в трубопроводах.
В случае закупорки трубопровода полного давления (pitot probes) указатель скорости не покажет увеличения скорости в процессе разбега на взлете. Однако после отрыва скорость начнет расти, поскольку статическое давление будет уменьшаться. Высотомеры будут работать практически правильно. При дальнейшем наборе скорость будет расти через правильное значение и далее превысит ограничение с соответствующим срабатыванием сигнализации (overspeed warning). Сложность данного отказа в том, что какое-то время приборы будут показывать практически нормальные показания, что может вызвать иллюзию восстановления нормальной работы системы.
В случае закупорки трубопровода статического давления (static ports) в процессе разбега система будет работать нормально, но в процессе набора высоты покажет резкое уменьшение скорости вплоть до нуля. Показания высотомеров останутся на высоте аэродрома. Если пилоты пытаются сохранить требуемые показания скорости путем уменьшения тангажа в наборе высоты, то, как правило, это заканчивается выходом за ограничения по максимальной скорости.
Кроме случаев полной закупорки возможна частичная закупорка или разгерметизация трубопроводов. При этом распознать отказ может быть значительно сложнее. Ключевым моментом является распознание систем и приборов, не затронутых отказом и завершение полета с их помощью. Если есть индикация угла атаки – пилотировать внутри зеленого сектора, если нет – установить тангаж и обороты двигателей N1 в соответствие с режимом полета по таблицам «Unreliable airspeed» в QRH. По возможности выйти из облаков. Попросить помощь у службы движения, учитывая, что они могут иметь неправильную информацию о вашей высоте полета. Не доверять приборам, показания которых были под подозрением, но в данный момент, кажется, работают правильно.
Как правило, надежная информация в этом случае: инерциальная система (положение в пространстве и путевая скорость), обороты двигателей, радиовысотомер, срабатывание stick shaker (приближение к сваливанию), срабатывание EGPWS (опасное сближение с землей).
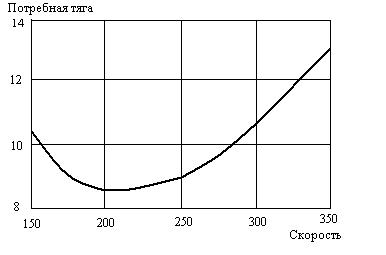
На графике показана потребная тяга двигателя (сила сопротивления самолета) в горизонтальном полете на уровне моря в стандартной атмосфере. Тяга указана в тысячах фунтов, а скорость – в узлах.
Наивыгоднейшая скорость (скорость минимального лобового сопротивления) в полётной конфигурации самолёта может быть рассчитана по следующей мнемонической формуле: Vнаивыг = 2,2 * ( G – 50) 215
Где G – текущий вес самолёта в тоннах, а результат получится в узлах.
Например: вес 60 тонн. Отнимаем 50, остаётся 10, умножаем на 2,2 – получаем 22, складываем с 215, получаем 237 узлов.
Данная формула получилась из анализа скоростей FMC со странички Climb режим Max angle, поскольку именно на наивыгоднейшей скорости самолёт имеет максимальный угол набора высоты или же минимальный угол снижения при планировании.
Расчётная скорость маневрирования (VA) – это скорость, ограничения маневрирования самолёта. Если скорость больше или равна VA, то нельзя использовать полные углы отклонения рулей и выводить самолёт на углы атаки, близкие к критическим, поскольку при этом нагрузки на элементы конструкции могут превысить предельно допустимые значения. (см. http://aviacom.ucoz.ru/Principleflight4.doc стр. 4)
| Высота, футы | VA |
| 275 узлов | |
| 285 узлов | |
| 295 узлов | |
| 310 узлов |
Скорости для Classic
VMO/MMO(maximum operating limit speed/ Mach) Скорость/ число М максимальные эксплуатационные равны 340 узлов / 0.82 М
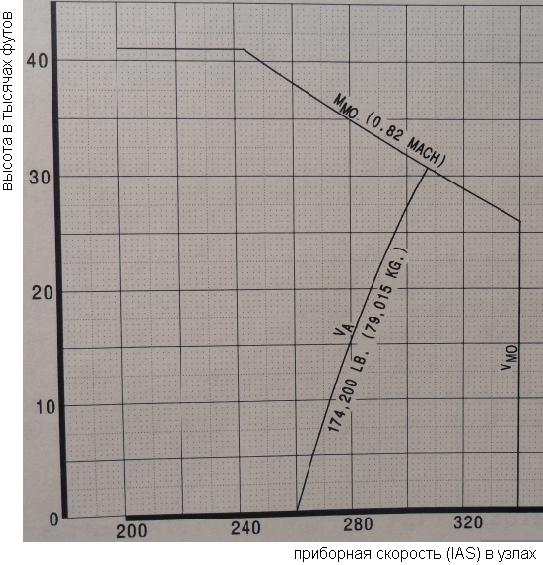
На фото VA для 737-800.
§
Основным документом по загрузке и центровке на борту является WBM (Weight and Balance control and loading Manual). Но в практике он не используется. Центровка обычно рассчитывается вручную с использованием бланка Trimsheet или же автоматически с использованием специальной программы, когда экипажу приносят уже готовые цифры.
WBM и Trimsheet используют разные понятия для определения центровки самолёта.
В WBM используется понятие B.A. (Balance Arm). Это расстояние в дюймах от условной точки, расположенной на оси самолёта впереди носа самолёта, до поперечного сечения, в плоскости которого находится интересующий нас объект. В качестве примера далее в тексте будет рассматриваться модификация 737-500. Для этой модификации точка отсчёта расположена на расстоянии 104 дюйма впереди носа самолёта.
Зная B.A. каждого элемента самолёта и, умножив его на соответствующий вес, получим момент силы тяжести данного элемента относительно точки отсчёта.
Просуммировав все моменты от каждого элемента, получим суммарный момент.
Разделив суммарный момент на суммарный вес всего самолёта, получим расстояние (B.A.) центра тяжести самолёта от точки отсчёта.
Отняв от этого расстояния удаление передней кромки САХ от начала отсчёта (625,6 дюйма) и разделив на длину САХ (134,5 дюйма) получим координату центра тяжести, выраженную в процентах САХ.
хТ = (B.A. – 625,6) / 134,5 * 100%
В Trimsheet используется понятие LI (Loaded Index). Это условное понятие, численно равное моменту силы тяжести самолёта относительно точки, удалённой на 648,5 дюймов(737-500) от точки отсчёта, используемой в WBM. То есть, приблизительно от центра самолёта. Для удобства этот момент разделен на константу 30000 и, чтобы не допускать отрицательных значений, к результату деления добавляют константу 40.
LI = [G * (B.A. – 648,5 )] / 30000 40, где G – вес самолёта в рассматриваемом варианте ( пустой, снаряженный без топлива, взлётный, посадочный и т.д.);
B.A. – расстояние от точки отсчёта по WBM до центра тяжести самолёта.
Отправной точкой в расчётах центровки по Trimsheet являются заранее рассчитанные значения DOW и DOI.
В DOW (Dry Operating Weight) входит вес снаряженного самолёта, вес экипажа, экипажного багажа, кухни и воды, заправленной в систему водоснабжения.
DOI (Dry Operating Index) – момент центра тяжести самолёта в описанном выше состоянии, рассчитанный по описанной выше методике.
Далее расчёт смещения центра тяжести в процессе загрузки самолёта происходит по следующей методике: Для каждого отсека багажника, каждой секции пассажирской кабины, каждого количества заправляемого топлива рассчитаны изменения в LI. Эти изменения суммируются, и получается требуемый LI самолёта.
Если к DOI добавить поправку на размещение багажа, то получится DLI (Deadload Index).
Когда к DLI добавят поправку на размещение пассажиров, то получится LIZFW (Loaded Index at Zero Fuel Weight).
Прибавляя поправку на количество находящегося на борту топлива получим LITOW (Loaded Index at Take-Off Weight) или LILAW (Loaded Index at LAnding Weight).
Зная LI самолёта можно рассчитать положение центра тяжести в % САХ по вышеуказанной формуле:
хТ = (B.A. – 625,6) / 134,5 * 100% , где B.A. находится по следующей зависимости:
B.A. = [(LI – 40) * 30000] / G 648,5 , где G – соответствующий вес самолёта.
Или же данный расчёт производится графически на бланке Trimsheet.

На фото – немного не рассчитали с центровкой.
Взлет самолета
Траектория взлета простирается от точки старта до набора высоты 1500 футов, или окончания уборки закрылков с достижением скорости VFTO (final takeoff speed), какая из этих точек выше.
Максимальный взлетный вес самолета ограничивается следующими условиями:
1. Максимально-допустимой энергией, поглощаемой тормозами, в случае прерванного взлета.
2. Располагаемой дистанцией взлета.
3. Максимально-допустимой сертифицированной взлетной массой.
4. Максимально-допустимой путевой скоростью отрыва от ВПП (по прочности пневматиков). Обычно 225 узлов, но возможно 195 узлов. Эта скорость написана прямо на пневматиках.
5. Минимальной эволютивной скоростью разбега; VMCG (minimum control speed on the ground)
6. Минимально-допустимым градиентом набора высоты.
7. Максимально-допустимым временем работы двигателя на взлетном режиме (5 минут), в случае продолженного взлета для набора необходимой высоты и разгона для уборки механизации.
8. Минимально-допустимой высотой пролета над препятствиями.
Разделим эти условия на две группы: первая – с 1 по 5 (ограничения, накладываемые используемой ВПП) и вторая – с 6 по 8 (ограничения, обеспечивающие безопасность полета после отрыва от ВПП).
§
Дистанции взлета с нормально работающими двигателями от начала движения до набора высоты условного препятствия35 футов, умноженной на коэффициент 1,15.
Дистанции продолженного взлета от начала движения до набора высоты условного препятствия (screen height) 35 футов и безопасной скорости V2 при отказе двигателя на скорости принятия решения V1.
Располагаемая дистанция взлета
В располагаемую дистанцию взлета (takeoff field length) входит рабочая длина взлетно-посадочной полосы с учетом концевой полосы безопасности (Stopway) и полосы, свободной от препятствий (Clearway).
Располагаемая дистанция взлета не может быть меньше любой из трех дистанций:
2. Дистанции прерванного взлета, при отказе двигателя на VEF. Где VEF (engine failure) – скорость в момент отказа двигателя, при этом предполагается, что пилот распознает отказ и выполнит первое действие по прекращению взлета на скорости принятия решения V1.На сухой ВПП не учитывается влияние реверса работающего двигателя.
В располагаемую дистанцию взлета входят рабочая длина ВПП и длина концевой полосы безопасности (Stopway).
Длину полосы, свободной от препятствий (Clearway), разрешается прибавлять к располагаемой дистанции взлета, но не более половины воздушного участка траектории взлета от точки отрыва до набора высоты 35 футов и безопасной скорости.
Если мы прибавляем к длине ВПП длину КБП, то мы можем увеличить взлетный вес, при этом скорость принятия решения увеличится, для обеспечения набора высоты 35 футов над концом КБП.
Если мы используем полосу свободную от препятствий, то мы также можем увеличить взлетный вес, но при этом скорость принятия решения уменьшится, поскольку нам необходимо обеспечить остановку самолета в случае прерванного взлета с увеличенным весом в пределах рабочей длины ВПП. В случае продолженного взлета в этом случае самолет наберет высоту 35 футов за пределами ВПП, но над полосой, свободной от препятствий.
Это земная индикаторная скорость в ходе разбега, при которой в случае внезапного отказа критического двигателя, возможно сохранять управление самолетом, используя только руль направления (без использования управления передним колесом шасси) и сохранять поперечное управление в такой степени, чтобы удерживать крыло в близком к горизонтальному положении для обеспечения безопасного продолжения взлета. VMCGне зависит от состояния ВПП, поскольку при ее определении не учитывается реакция ВПП на самолет. В таблицах представлены VMCG в узлах для взлета с двигателями с тягой 22К и 20К соответственно. Где Actual OAT- температура наружного воздуха, а Press ALT- превышение аэродрома в футах. Приписка снизу касается взлета с выключенными отборами воздуха от двигателей (no engine bleeds takeoff), поскольку тяга двигателей возрастает, то возрастает и VMCG.
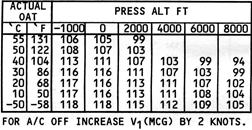
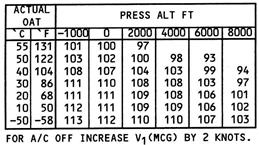
Взлет с отказавшим двигателем может быть продолжен лишь в случае, если отказ двигателя произойдет при скорости ³ VMCG.
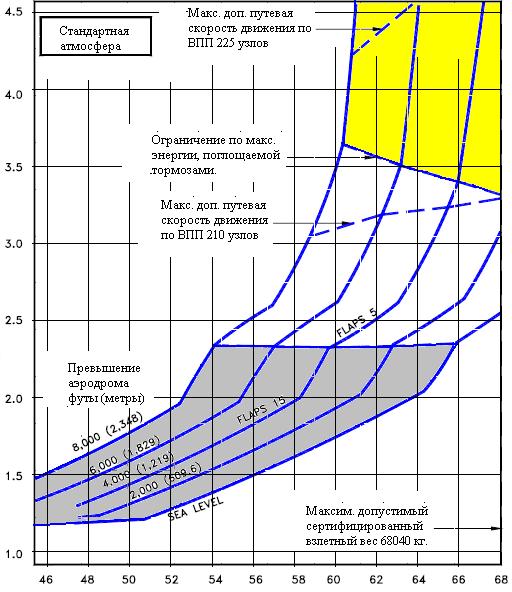
Боинг опубликовал графики зависимости максимально-допустимой взлетной массы, определяемой из ограничений, накладываемых используемой ВПП, в зависимости от длины ВПП, её превышения над уровнем моря и отклонения температуры воздуха от стандартной атмосферы. Они опубликованы в документе “737 Airplane Characteristics for Airport Planning” D6-58325-6 October 2005.
Эти графики не учитывают возможности самолета после отрыва от ВПП, поэтому их нельзя использовать для определения взлетной массы.
Тем не менее, знать максимальную массу, ограниченную располагаемой длиной ВПП, полезно.
Например, при взлете с отказавшим антиюзом, Боинг рекомендует максимально-допустимую массу, ограниченную длиной ВПП, уменьшить на 7800 кг для 737-300 или на 7500 кг для 737 (400-500). В данном случае можно воспользоваться данными графиками, если рассчитанная максимальная взлетная масса ограничивается минимально-допустимым градиентом набора высоты (что чаще всего и происходит).
Серым цветом обозначена часть графика, рассчитанная под взлет с закрылками 15 (при данной длине ВПП больший взлетный вес обеспечивается в конфигурации – закрылки 15).
Желтым – где взлет недопустим из-за превышения максимально-допустимой энергии, поглощаемой тормозами в случае прерванного взлета.
На всех графиках условия: штиль, нулевой уклон ВПП, взлет без отбора воздуха от двигателей.
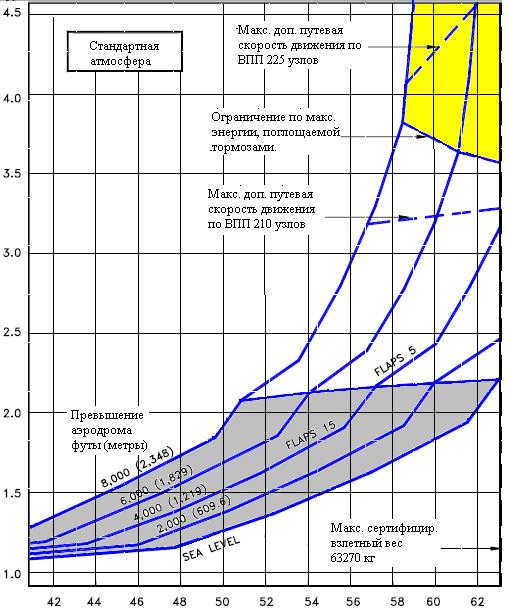
Максимальная взлетная масса (в тоннах) Боинг 737-300 22,0K в зависимости от длины ВПП (в км.), при стандартной атмосфере.
Максимальная взлетная масса (в тоннах) Боинг 737-400 23,5K в зависимости от длины ВПП (в км.), при стандартной атмосфере.
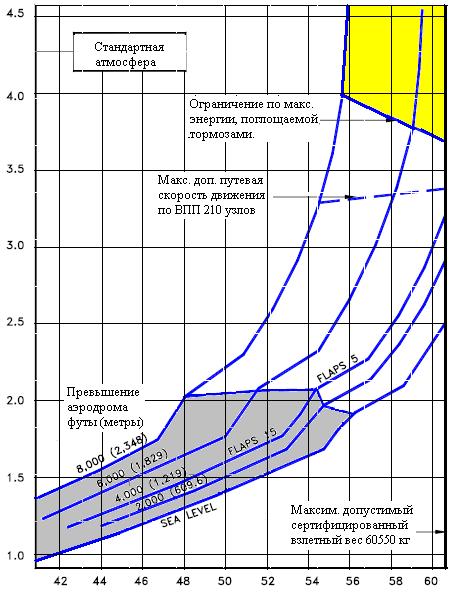
Максимальная взлетная масса (в тоннах) Боинг 737-500 20K в зависимости от длины ВПП (в км.), при стандартной атмосфере.
Минимально-допустимая высота пролета над препятствиями.
Минимально-допустимая высота пролета над препятствиями по «чистой» (net) траектории взлета равна 35 футов.
«Чистая» – это траектория взлета, градиент набора высоты которой уменьшен на 0,8% по сравнению с реальным градиентом для данных условий.
При построении схемы стандартного выхода из района аэродрома после взлета (SID) закладывается минимальный градиент «чистой» траектории 2,5%. Таким образом, чтобы выполнить схему выхода, максимальный взлетный вес самолета должен обеспечить градиент набора высоты 2,5 0,8 = 3,3%.
Некоторые схемы выхода могут требовать более высокого градиента, что требует уменьшения взлетного веса.
Минимально-допустимый градиент набора высоты.
В соответствии с нормами летной годности FAR 25 (Federal Aviation Regulations) градиент нормируется по трем сегментам:
1. С выпущенными шасси, закрылки во взлетном положении – градиент должен быть более нуля.
2. После уборки шасси, закрылки во взлетном положении – минимальный градиент 2,4%. (Взлетный вес ограничивается, как правило, выполнением данного требования.)
3. В крейсерской конфигурации – минимальный градиент 1,2%.
Взлет с мокрой полосы
При расчете максимально-допустимой взлетной массы, в случае продолженного взлета, используется уменьшенная высота условного препятствия (screen height) 15 футов, вместо 35 футов для сухой ВПП. В связи с этим нельзя в расчет взлетной дистанции включать полосу, свободную от препятствий (Clearway).
При расчетах прерванного взлета разрешается учитывать эффект реверса двигателей.
Взлет с полосы, покрытой слоем осадков (contaminated)
На взлет с ВПП, покрытой слоем осадков (вода, снег, слякоть), накладывается ряд ограничений:
1. Запрещается использовать технологию увеличения градиента набора высоты (improved climb).
2. Запрещается уменьшать режим работы двигателя на взлете, используя технологию имитации температуры наружного воздуха (assumed temperature).
3. Антиюз должен быть включен и исправен.
При движении по ВПП, покрытой слоем осадков, на самолёт действует дополнительная сила сопротивления, вызванная затратой энергии на смещение и разбрызгивание слякоти (воды).
Силу сопротивления слякоти (slush force), можно найти:
F SLUSH = CX SLUSH ½ ρ V2 A;
где CXSLUSH – коэффициент силы сопротивления слякоти, зависящий от конструкции шасси,
ρ – плотность слякоти (0.85 kg/dm3 или 1.65 slugs/ft3),
V – путевая скорость,
А – площадь взаимодействия колёс со слякотью (см. рисунок).
На скорости VHP = 8.63*Ö Tp, где Tp – давление в пневматиках в фунтах на квадратный дюйм (PSI) начинает проявляться явление гидропланирования. Контакт колёс с ВПП уменьшается, что приводит к уменьшению силы сопротивления слякоти.
Степень уменьшения силы сопротивления описывается коэффициентом fHP.
fHP = ((1.6 VHP – V )/ 0.6 VHP)(2.5 V / VHP – 1.5)
На скорости более VHP: F SLUSH = CXSLUSH ½ ρ V2 A fHP;
Сила сопротивления слякоти при подъёме передней стойки ступенчато уменьшается из-за вывода переднего колеса из слоя слякоти и исчезает полностью при отрыве самолёта от ВПП.
На рисунке показано, как уменьшается ускоряющая сила (разница между тягой и суммой сопротивлений) в процессе роста скорости при движении по ВПП покрытой слоем осадков.
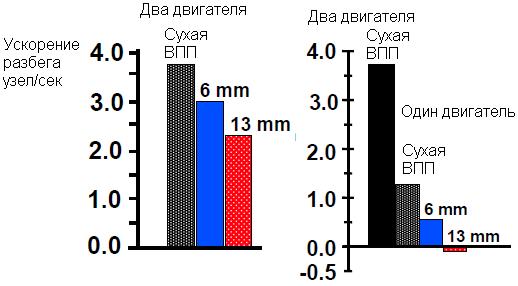
Следующий рисунок показывает ускорения на разбеге на скорости 130 узлов в зависимости от состояния ВПП на двух и одном работающем двигателе. Синий и красный столбик соответствуют слою слякоти 6 и 13 мм соответственно.
В случае прерванного взлёта слякоть уменьшает располагаемое ускорение торможения по сравнению с сухой ВПП.
С одной стороны слякоть резко уменьшает сцепление колёс с ВПП, особенно на скоростях возле скорости гидропланирования VHP. С другой стороны слякоть создаёт дополнительное сопротивление, повышающее тормозящую силу.
На следующем рисунке показаны ускорения торможения на сухой полосе и ВПП покрытой слоем слякоти 6 и 13 мм.
При расчете ускорения торможения на сухой ВПП принимаются следующие условия: максимальное торможение колёс, выпущены все интерцепторы, работающий двигатель на режиме прямой тяги – малый газ.
Торможение на ВПП покрытой слякотью: максимальное торможение колёс, выпущены все интерцепторы, работающий двигатель на режиме максимального реверса.

Не пытайтесь взлететь с ВПП покрытой слоем воды или слякоти более 13 мм.
( http://www.smartcockpit.com/pdf/flightops/aerodynamics/4 )
§
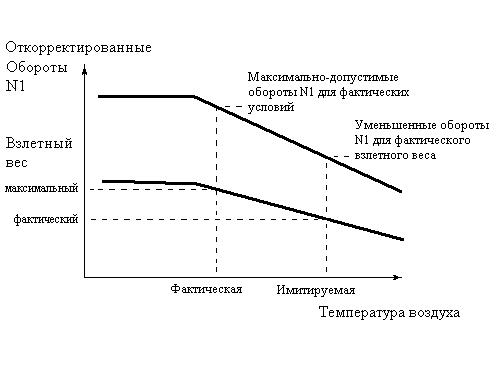
В условиях, когда максимально-допустимый взлетный вес значительно превышает фактический, рекомендуется выполнять взлет с неполной взлетной тягой двигателей. Это позволяет повысить надежность работы двигателей, экономить расходы по эксплуатации двигателей, создает меньше шума, способствует комфорту пассажиров за счет более плавного изменения параметров полета, особенно если вскоре после взлета придется переходить в горизонтальный полет. Особенно это желательно делать при взлетах в жаркую погоду, поскольку резко уменьшается вероятность превышения максимально допустимой температуры газов за турбиной (930°С) в процессе разгона на взлете.
Существует два способа уменьшения тяги:
– ступенчатый перевод двигателя на нижнюю ступень тяги (derate). CFM 56-3 имеет 4 модификации: В4, В1, В2 и С1 имеющие максимальную статическую тягу соответственно 18,5; 20; 22 и 23,5 тысяч фунтов. Так, если на модификации С1 установить Derate 1, навигационный компьютер (FMC) будет строить расчеты на максимальную тягу 22 тысячи фунтов, а если Derate 2 – то 20 тысяч.
– имитация температуры наружного воздуха(assumed temperature).
Общеизвестно, что с увеличением температуры воздуха максимально-допустимая взлетная масса уменьшается. Это связано в первую очередь с уменьшением располагаемой тяги двигателей. Как и в любой тепловой машине, в реактивном двигателе мощность напрямую зависит от количества тепла переданного рабочему телу (воздуху). Верхний предел температуры газов ограничен прочностью турбины, поэтому при повышении температуры воздуха, входящего в двигатель, разница температур (а значит и мощность) падает.
Кроме этого, при увеличении температуры воздуха падает его плотность, что приводит к увеличению скоростей на взлете и, следовательно, уменьшению допустимого взлетного веса при неизменных параметрах аэродрома вылета.
Метод имитации температуры наружного воздуха состоит в том, чтобы задать FMC такую температуру, при которой фактический взлетный вес являлся бы максимально-допустимым (для всех остальных фактических условий: ВПП, препятствия и т.д.).
Применение данного метода имеет ряд ограничений. Согласно нормам, нельзя уменьшать тягу данным методом более, чем на 25%.
Использование данного метода запрещено, при:
1. Взлете с ВПП, покрытой слоем осадков (contaminated RW).
2. Взлете с попутным ветром.
3. Взлете с выключенными РМС.
4. При неработающей FMC.
5. При ожидаемом сдвиге ветра на взлете.
6. При неработающем антиюзе.
Оба метода уменьшения взлетной тяги не противоречат друг другу и их можно применять одновременно. Вместе с тем есть принципиальное отличие по их влиянию на взлетные характеристики.
При использовании Derate новый установленный максимум тяги нельзя превышать (как будто у вас стоит менее мощный двигатель). В напоминание об этом на индикаторе оборотов N1 опустятся ограничители (bugs).
При использовании assumed temperature пилоты могут в любой момент увеличить тягу до максимальной.
Исходя из этого строится расчет VMCG. Соответственно при использовании assumed temperature – VMCGне меняется, а при использовании Derate – уменьшается за счет уменьшения разворачивающего момента от двигателя, выдающего меньшую тягу.
Данное свойство Derate может помочь в увеличении максимально-допустимой взлетной массы при взлетах с коротких ВПП и с ВПП, покрытых слоем осадков. Это происходит потому, что вес в данном случае ограничивается необходимостью на взлете достичь VMCG ,а затемпри необходимости остановиться в пределах ВПП.
§
Определение достаточности ускорения разбега.
QRH (Quick Reference Handbook) предписывает командиру экипажа прекратить взлёт до достижения скорости 80 узлов в случае «abnormally slow acceleration». Но нигде не описывается, как определить наступление данного события. (В качестве примера можно привести катастрофу Як-42 в Ярославле 7 сентября 2023 года).
Боинг 737, оборудованный EFIS (Electronic Flight Instrument System), позволяет проконтролировать ускорение разбега. На EADI (Electronic Attitude Director Indicator) индицируется зелёная стрелочка Airspeed Trend Arrow, которая указывает на значение скорости, которую самолёт будет иметь через 10 секунд (при условии неизменности ускорения). Во время разбега можно проконтролировать длину этой стрелки. Поскольку скорость проградуирована через 10 узлов, то удобно за единицу длины стрелки взять эти 10 узлов. Назовём эту единицу X. То есть 1X = 10 knots/10 sec = 0,5144 м/с2.
Длина разбега равна L разб = Vотр 2 / 2 j разб
Преобразовываем формулу для определения потребного ускорения разбега по известным L разб и Vотр. Скорость берём в узлах.
X потр = 0,2572 * (Vотр)2 / L разб
В качестве Vотр можно использовать VR. Выражение 0,2572 * (VR )2 имеет приблизительные значения :
Осталось поделить эту величину на располагаемую длину разбега в метрах (примерно 2/3 от располагаемой длины ВПП) и получить минимально допустимую величину ускорения на взлёте в единицах длины зелёной стрелочки (X).
Например: располагаемая длина разбега 2900 метров, скорость VR 150 узлов, (5800 : 2900 = 2) значит, после выхода двигателей на расчётный режим ускорение должно быть не менее 20 узлов за 10 секунд, то есть длина зелёной стрелочки должна быть не меньше двух делений шкалы скорости.
Посадка самолета
Максимально-допустимый посадочный вес определяется на основании располагаемой длины ВПП, соблюдении требований к градиентам набора высоты в конфигурации захода на посадку (approach climb) и в посадочной конфигурации (landing climb). Также он не может быть больше максимального сертифицированного посадочного веса.
Исходной точкой в определении потребной длины ВПП выступают продемонстрированные в летных испытаниях посадочные дистанции. Эти дистанции замеряются с высоты 50 футов над ВПП, применяется минимальное выравнивание (касание ВПП 800 – 1100 футов от торца, вертикальная скорость приземления до 8 футов/сек), максимальное использование возможностей тормозов и интерцепторов. Испытания проводятся на сухой ВПП без применения реверса тяги.
(http://www.faa.gov/other_visit/aviation_industry/airline_operators/airline_safety/safo/all_safos/media/2006/safo06012.pdf пункт 5 f)
Полученные данные (unfactored distances) публикуются в руководстве по летной эксплуатации вместе с поправочными добавками на изменение веса, высоты аэродрома, ветер и т.д.
Полученные таким образом посадочные дистанции показывают максимально возможные характеристики самолёта, что практически недостижимо в повседневной эксплуатации. Для примера: Шасси самолёта сертифицируются на касание ВПП с вертикальной скоростью 10 футов/сек, что всего на 2 фута/сек меньше, чем вертикальная скорость, используемая при демонстрации посадочной дистанции. (http://ecfr.gpoaccess.gov/cgi/t/text/text-idx?c=ecfr&rgn=div5&view=text&node=14:1.0.1.3.11&idno=14#14:1.0.1.3.11.2.155.15 параграф 25.473 )
Согласно нормам длина сухой ВПП для посадки не может быть меньше опубликованной потребной посадочной дистанции (со всеми добавками), умноженной на коэффициент безопасности 1,67.
Для мокрой ВПП полученный результат увеличивают еще на 15%, т. е. коэффициент безопасности равен 1,67*1,15 = 1,92.
Если на ВПП покрыта снегом (льдом) или жидкими осадками толщиной более 3 мм на площади более 25 %, то она считается «покрытой осадками» (contaminated). В этом случае потребной посадочной дистанцией будет максимальная из двух:
– рассчитанная для мокрой ВПП;
– взятая из QRH раздел Performance Inflight, Normal Configuration Landing Distance для соответствующего Braking Action, умноженная на коэффициент безопасности 1,15.
(http://www.easa.eu.int/rulemaking/docs/crd/part-ops/CRD b.3 – Resulting text of Part-CAT (A,H)-corrigendum-1.pdf Performance class A CAT. POL. A. 225 (230, 235))
§
Ограничения по градиенту набора высоты
Соблюдение этих ограничений необходимо для обеспечения безопасного набора высоты в случае ухода на второй круг.
Градиент набора высоты в конфигурации захода на посадку (approach climb) должен быть не менее 2,1% для захода по первой категории и не менее 2,5% при высоте принятия решения менее 200 футов. Он замеряется при закрылках, выпущенных на 5°, убранных шасси и одном работающем двигателе на режиме ухода на второй круг.
Градиент набора высоты в посадочной конфигурации (landing climb) должен быть не менее 3,2%. Он замеряется при посадочных закрылках, выпущенных шасси и обоих работающих двигателях на режиме, на который двигатели успеют выйти с режима малого газа на 8-ой секунде, после установки пилотом РУД в положение ухода на второй круг.
Для Боинга 737 более критичным является первое ограничение (approach climb).
Графики для определения максимального approach climb и landing climb масс находятся в руководстве по летной эксплуатации (AFM).
На определенной скорости, называемой скоростью гидропланирования (VHP), самолет, движущийся по мокрой ВПП, давлением воды на пневматики приподнимается над ВПП. При этом самолет теряет возможность управляться и тормозиться с помощью колес. Скорость VHP зависит от давления воздуха в пневматиках. Испытания показали, что минимальная VHP = 8.63*Ö Tp, где Tp – давление в пневматиках в фунтах на квадратный дюйм (PSI). Для справки 1PSI = 0,07 кг/см2.
| Серии с-та | Основные стойки | VHP | Носовая стойка | VHP |
| 100-200 | 96 – 183psi | 84 – 116 узлов | 125 – 145psi | 96 – 104 узлов |
| 300-500 | 185 – 217psi | 118 – 128 узлов | 163 – 194psi | 111 – 121 узлов |
| 600-900 | 117 – 205psi | 93 – 123 узлов | 123 – 208psi | 95 – 124 узлов |

На фото повреждение пневматика Боинга 737-300 авиакомпании Webjet после посадки в условиях сильного дождя из-за гидропланирования 8 сентября 2023 года. (http://avherald.com/h?article=442bd0e6&opt=0)
Тормозная система самолёта оборудована системой автоматического торможения. Она имеет 5 режимов работы: RTO, 1, 2, 3 и МАХ.
Режим RTO предназначен для автоматического торможения при прерванном взлёте. Чтобы произошло включение режима необходимо, чтобы:
– путевая скорость самолёта больше 88 узлов
-самолёт находился на земле
– оба РУД были в положении малого газа
При этом во все четыре тормоза подаётся полное давление торможения (3000 psi), темп торможения не контролируется. Режим продолжается до полной остановки или вмешательства пилота или отказа системы.
Остальные режимы предназначены для посадки. Чтобы режим включился необходимо, чтобы колёса раскрутились до скорости не менее 70 узлов и оба РУД были в положении малого газа. При этом в тормоза с темпом 100 psi/сек подаётся давление и контролируется темп торможения путём регулирования давления в тормозах.
Заданные темпы торможения для соответствующего режима:
1 – 4 фута/с2; 2 – 5 футов/с2; 3 – 7,2 фута/с2; МАХ – 14 футов/с2(при скорости более 80 узлов) и 12 футов/с2 (при скорости менее 80 узлов).
Контроль за работой автомата торможения можно выполнять по длине зелёной стрелочки на линейке скоростей (см. «Определение достаточности ускорения разбега»). Длина должна быть: 1 – 2,4; 2 – 3,0; 3 – 4,3 делений шкалы скорости для соответствующего режима автоматического торможения. (Вся видимая линейка скоростей имеет длину по 40 узлов вверх и вниз, поэтому ускорения более 40 узлов/10сек (4 деления) по длине стрелки проконтролировать невозможно.)
В нижеприведенной таблице приведены дистанции торможения для разных скоростей захода на посадку VREF и разных положений системы автоматического торможения. В дистанцию торможения включены 300 метров воздушного участка от торца ВПП до касания и дистанция торможения с соответствующим темпом от VREF до скорости руления 30 узлов.
| Autobrake | |||
| 120 узлов | 1820 м | 1520 м | 1150 м |
| 130 узлов | 2090 м | 1740 м | 1300 м |
| 140 узлов | 2380 м | 1970 м | 1460 м |
| 150 узлов | 2700 м | 2220 м | 1640 м |
Важно: На скользкой ВПП система автоматического торможения может не справиться с выдерживанием заданного темпа торможения, поэтому посадочную дистанцию следует рассчитывать на основании данных в QRH в разделе Performance Inflight!
При выполнении посадки самолёта очень важной характеристикой самолёта является расстояние от глаз лётчика до линии колёс основных стоек шасси.
На Боинге 737-500 лётчик сидит впереди основных стоек на расстоянии 12,55 метра, на 737-800 на расстоянии 17,18 метра.
В процессе выравнивания и последующего снижения самолёта вплоть до касания ВПП угол тангажа самолёта, как правило, непрерывно увеличивается. При этом колёса «провисают» относительно уровня глаз лётчика.
∆h = b tg ∆θ, где b – расстояние от лётчика до основных шасси, ∆θ – изменение угла тангажа.
Степень изменения угла тангажа на посадке зависит от многих факторов. В первую очередь от темпа выравнивания и гашения поступательной скорости.
При большом расстоянии b и быстром уменьшении скорости на посадке кабина лётчиков может подниматься над ВПП, в то время, как основные стойки будут снижаться со значительной вертикальной скоростью.
В Flight Crew Training Manual NG указаны следующие средние значения угла тангажа на посадке: торец ВПП 2 ÷ 4°, касание ВПП 4 ÷ 7°, время полёта от торца ВПП до посадки 4 ÷ 8 секунд при длине воздушного участка 1000 ÷ 2000 футов, соответственно.
Если взять изменение тангажа 3°, то шасси опустится относительно пилотской кабины на
tg3° × 17,18 = 0,9 метра. Если это произойдёт за 4 секунды, то прирост вертикальной скорости составит 0,9 : 4 = 0,225 м/с. Если пилотская кабина в момент касания не будет снижаться, то перегрузка на касании ВПП составит порядка 1,1.
В Flight Crew Training Manual NG указана нормальная вертикальная скорость касания ВПП 150 футов/минуту = 0,75 м/с.
Устойчивость и управляемость
Самолет, в отличие от наземных и надводных средств передвижения, в полете имеет шесть степеней свободы. (Также, как и космические аппараты и подводные лодки). Это значит, что он может одновременно перемещаться вдоль и вращаться вокруг трех взаимно перпендикулярных осей.
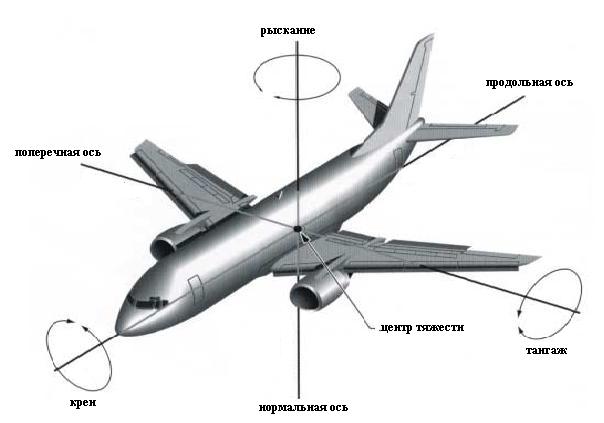
Для обеспечения равномерного прямолинейного движения необходимо, чтобы все силы и моменты, действующие на самолет, были взаимно уравновешены. Выполнение этого условия требует, чтобы сумма проекций сил и моментов на оси координат была равна нулю.
Поскольку самолет симметричен относительно плоскости, создаваемой продольной и нормальной осями, то устойчивость и управляемость самолета делят на два большие раздела – продольную и боковую.
К продольному движению относят перемещение вдоль продольной и нормальной оси и вращение относительно поперечной. В этом движении участвуют самые большие из сил, действующих на самолет: подъемная сила, сила тяжести, сила тяги двигателей и лобового сопротивления. Любая несбалансированность вызывает сильное изменение траектории самолета от заданной. Поэтому управление самолетом в продольном движении, обеспечение продольного равновесия является наиболее важным.
Перемещение самолета вдоль поперечной оси и вращение относительно продольной и нормальной осей относят к боковому движению самолета. Оно считается менее важным, тем не менее, недостатки в системе управления именно этим каналом на Боинге 737, привели к серии катастроф и последующей модернизации системы управления.
§
Боинг 737 имеет излишнюю степень поперечной статической устойчивости (mxβ), особенно с отклоненной механизацией крыла.
Поперечной устойчивостью самолета называется его способность крениться в сторону, обратную скольжению. Основную роль в создании кренящего момента играет стреловидное крыло: при возникновении скольжения у выдвинутого вперед полукрыла угол стреловидности как бы уменьшится на величину угла скольжения, а у отстающего увеличится на такую же величину.
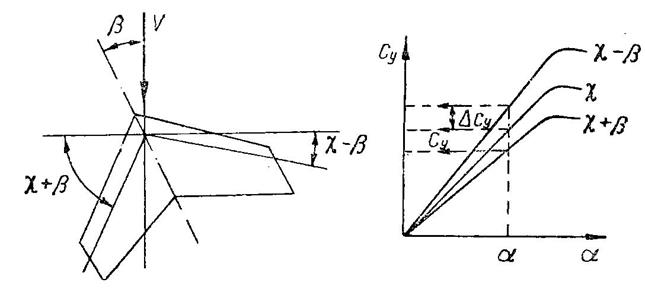
Такое изменение углов стреловидности полукрыльев приведет к изменению их несущих свойств так, что у выдвинутого вперед полукрыла увеличится коэффициент подъемной силы, а у отстающего – уменьшится. Возникнет кренящий момент в сторону, обратную скольжению. Возникающий момент частично компенсируется, возникающим при вращении, демпфирующим моментом крена (mxωx), но все равно вызывает энергичное кренение.
Таким образом, самолет чрезмерно реагирует креном на боковые порывы ветра, что усложняет пилотирование в условиях порывистого бокового ветра.
Допустимая степень боковой асимметрии самолёта (на “NG”) определена в документе Fault Isolation Manual.
В крейсерском полёте (М ~ 0.78, Эшелон ≥ 370), для балансировки самолёта без крена и скольжения, отклонение руля направления не должно превышать 0,5 unit, а отклонение штурвального колеса не более 0,75 unit. Балансировка выполняется по следующей методике: Обеспечить балансировку топлива с погрешностью не более 68 кг и симметричность тяги двигателей с погрешностью не более 1% N1. Автомат тяги выключить. При включенном автопилоте в режиме выдерживания заданного курса (HDG SEL) отклонением рукоятки руля направления обеспечить полёт без крена, больше руль направления не трогать. Затем отключить автопилот и снять усилия со штурвального колеса отклонением триммера элеронов, сохраняя полёт без крена на постоянном курсе. Полученные отклонения руля направления и штурвального колеса зафиксировать.
Аналогичная проверка выполняется на скорости 250 узлов, высоте 10 – 17 тысяч футов. При этом допустимые отклонения руля направления и штурвальной колонки равны 0,75 unit.
На этой же высоте выполняется проверка балансировки с выпущенными закрылками на 1, 15 и 40 градусов на соответствующих скоростях.
При этом требуемые отклонения руля направления не должны превышать 1 unit, а отклонения штурвального колеса на закрылках 1 и 15 – не более 1 unit и на закрылках 40 – не более 1,3 unit.
При изменении положения закрылков в диапазоне 1 – 15 градусов изменение положения штурвального колеса не должно превышать 1 unit, а в диапазоне 15 – 40 градусов не более 1,4 unit.
Рассмотренный выше метод балансировки обеспечивает полную балансировку по путевому и поперечному каналу, но требует отключения автопилота. Поэтому эта техника триммирования бокового канала называется у Боинга «альтернативной».
Рекомендованная техника триммирования аналогична альтернативной, но отклонением руля направления выравнивается штурвальное колесо, а не крен самолёта. При этом, если у самолёта есть поперечная асимметрия, то он будет лететь с креном и скольжением. Как правило, они незначительны и не влияют на расход топлива.
Рекомендованная техника триммирования значительно проще по исполнению. Поскольку штурвальное колесо триммируется в нейтраль, то при отключении автопилота не будет возникать разбалансировки по крену.
При альтернативном триммировании необходимо после каждого триммирования рулём направления выключать автопилот и снимать усилия со штурвального колеса. В дальнейшем, при работе автопилота и изменении режима полёта/положения механизации могут опять накопиться усилия в канале крена. При отключении автопилота возможен «рывок» по крену.
Демпфер рыскания (Yaw Damper)
Для улучшения характеристик бокового движения самолета и недопущения незатухающих колебаний типа «голландский шаг» в системе управления рулем направления установлен демпфер рыскания.
«Голландский шаг» (Dutch roll) появляется в результате относительно слабой путевой устойчивости и чрезмерной поперечной устойчивости самолета. Когда самолет вращается относительно продольной оси, самопроизвольно возникает скольжение в сторону опускающегося крыла, за счет возникающей боковой составляющей силы тяжести. Это сразу же приводит к возникновению момента поперечной устойчивости Mxβ , который стремится уменьшить возникший крен. На самолетах с высокой поперечной устойчивостью он может быть значительным.
В то же время возникает и момент путевой устойчивости Myβ , стремящийся развернуть нос самолета в сторону возникшего скольжения. Поскольку на многих самолетах путевая устойчивость значительно слабее поперечной, то восстановление скольжения отстает от восстановления крена. Самолет по инерции проскакивает положение без крена и начинает крениться в противоположную сторону. Таким образом, самолет без вмешательства в управление будет совершать незатухающие колебания по крену и скольжению.
Демпфер рыскания искусственно увеличивает путевую устойчивость и таким образом предотвращает колебания.
Чувствительным элементом демпфера рыскания является двухстепенной гироскоп, реагирующий на угловую скорость ωy , относительно нормальной оси Y. Этот сигнал фильтруется и усиливается в зависимости от скорости полета по сигналу от компьютера, рассчитывающего высотно-скоростные параметры (Air Data Computer). Далее сигнал поступает на управляющий золотник демпфера (см. схему главного рулевого привода РН в разделе «Путевое управление»). Золотник управляет перемещением исполнительного привода демпфера, что смещает центр вращения первичного и вторичного суммирующих рычагов и, таким образом, суммируется с перемещением педалей от летчиков и приводит к перемещению штока главного рулевого привода руля направления.
При этом перемещения исполнительного привода демпфера на педали не передаются, и летчик не может тактильно ощущать работу демпфера. Для контроля за его работой выведен индикатор, показывающий отклонения исполнительного привода демпфера.
Удобный контроль на рулении: планка первоначально должна отклониться в сторону противоположную развороту. Затем планка может возвращаться в нейтраль или даже отклоняться в сторону разворота. Это объясняется сложным законом отклонения руля направления, когда руль реагирует на быстроизменяющуюся составляющую угловой скорости разворота и не реагирует на постоянную её составляющую.
При нормальной работе демпфера в полёте отклонения планки индикатора практически незаметны.
На самолетах новой комплектации с установленным интегрированным узлом связи (IFSAU) между САУ и самолетом (см. Система автоматического управления), при выпущенных закрылках сигнал демпфера усиливается на 29% для противодействия усиливающейся поперечной устойчивости. Кроме того, на 50% гасятся сигналы с частотой 8 герц для уменьшения вибраций и улучшения комфорта пассажиров.
§
Координированное скольжение – это контрольный маневр, выполняемый при летных испытаниях самолета. Он позволяет выявить особенности боковой устойчивости и управляемости самолета, в частности взаимную эффективность поперечного и путевого управления. При его выполнении выдерживают прямолинейный полет на постоянной высоте и скорости с постепенным ступенчатым отклонением руля направления. Чтобы возникающее при этом скольжение не уводило самолет с прямолинейной траектории, создают крен в противоположную сторону. Таким образом, боковая составляющая силы тяжести будет компенсировать боковую силу от скольжения. В данном маневре путевой канал как бы борется с поперечным. Если нет прочностных ограничений, то отклонения рулей выполняются до полного расхода. Как правило, первыми становятся на упор педали, а поперечное управление ещё имеет запас. Но бывает и наоборот.
В отчете по расследованию катастрофы Боинга 737-200 3 марта 1991 года в районе Colorado Springs NTSB опубликовало результаты выполненных координированных скольжений на скорости 150-160 узлов в различной конфигурации закрылков от 40 до 10 градусов.
Рассматривался случай полного отклонения (непроизвольного увода) руля направления вправо на 25 градусов.
| Угол отклонения руля направлен. | Угол отклонения закрылков | Угол скольжения | Угол отклонения колеса штурвала | Угол крена |
| 25 прав | 14 прав | 35 лев | 18 лев | |
| 25 прав | 15 прав | 44 лев | 17 лев | |
| 25 прав | 15 прав | 68 лев | 16 лев | |
| 23 прав | 17 прав | 107 лев | 23 лев | |
| 21 прав | 16 прав | 107 лев | 19 лев | |
| 25 прав* | 13 прав | 107 лев | 40 прав |
Таким образом, из таблицы видно, что увод руля направления в крайнее положение не опасен при закрылках, выпущенных в положение от 40 до 25 градусов. Кренящий момент от возникшего скольжения можно будет парировать отклонением штурвала на угол, соответственно от 35 до 68 градусов. Объясняется это резко возросшей эффективностью отклоняемых в полете интерцепторов (flight spoilers), которые срывают поток с закрылка на той половине крыла, которая должна опускаться.
При угле выпуска закрылков менее 25 градусов полного отклонения штурвала не хватает для парирования увода руля направления (на скорости эксперимента – 150-160 узлов). Так при закрылках 15 балансировка была достигнута только при dРН=23 градуса, при закрылках 10 – при dРН=21 градус.
Нижняя строчка таблицы не относится к координированному скольжению. В данном случае балансировка была достигнута при выполнении виража вправо с креном 40 градусов. Штурвал при этом был отклонен влево на полный угол, а уменьшение угла скольжения с 16 до 13 градусов достигается за счет появления демпфирующего путевого момента МYwy от угловой скорости разворота.
Также в этом отчете есть информация о том, что поведенные исследования показали, что при уменьшении скорости до определенной величины, эффективности поперечного управления, с закрылками, выпущенными на 1 градус, становится недостаточно для парирования увода руля направления в крайнее положение. Данная скорость названа «скорость критической точки»(crossover airspeed).
Система автоматического управления
Система автоматического управления самолетом (AFCS) состоит из трех независимых систем: цифровой системы управления полетом (DFCS), демпфера рысканья (см. Боковая устойчивость и управляемость) и автомата тяги. Эти системы обеспечивают автоматическую стабилизацию самолета по тангажу, крену и скольжению и управление самолетом по сигналам радионавигационных средств, бортового навигационного компьютера (FMC), компьютера высотно-скоростных параметров (ADC) и стабилизацию курса.
Связь между цифровой системой управления и самолетом осуществляет в зависимости от комплектации самолета узел связи (AFC) или интегрированный узел связи (IFSAU). В зависимости от этого несколько меняется работа демпфера рысканья.
Автоматическое управление самолетом осуществляется посредством руля высоты и элеронов. На самолётах модификации «NG» может быть установлено автоматическое управление рулём направления.
Также происходит автоматическое снятие усилий со штурвала в продольном канале (с возвращением штурвальной колонки в нейтральное положение) путем перестановки стабилизатора. Автоматического снятия усилий в поперечном канале не происходит, поэтому запрещено пользоваться механизмом триммерного эффекта элеронов при включенном автопилоте. В этом случае рулевая машина автопилота будет пересиливать пружину загрузочного механизма (aileron feel and centering unit) и, при отключении автопилота, самолёт начнёт неожиданно для лётчика крениться.
Похожий случай произошел 6 сентября 2023 года в авиакомпании ANA, правда там лётчик непроизвольным отклонением механизма триммерного эффекта руля направления разбалансировал путевой канал, что привело к отключению автопилота и резкому кренению самолёта.
В полёте, при включенном автопилоте, штурвальная колонка и рулевое колесо должны стоять нейтрально. Это говорит об отсутствии усилий в проводке руля высоты и элеронов. Отклонение штурвальной колонки от нейтрали является признаком отказа управления стабилизатором или его ухода (runaway).
Отклонение рулевого колеса свидетельствует о поперечной (путевой) несимметрии самолета, неравномерной выработке топлива или несимметричной тяге двигателей. Техника триммирования бокового канала описана в разделе «боковая устойчивость и управляемость».
В случае полета с несимметричной тягой двигателей пилот должен отклонением педалей самостоятельно управлять путевым каналом. В противном случае точность выдерживания заданных параметров полета не гарантирована.
Отключение автопилота (DFCS) индицируется миганием красных ламп-кнопок «A/P P/RST» и звуком сирены, а отключение автомата тяги – только красными лампами-кнопками «A/T P/RST». Согласно отчета AAIB (Air Accidents Investigation Branch) о расследовании инцидента с Боингом 737-300 авиакомпании Thomsonfly, произошедшего в Bournemouth (Великобритания) 23 сентября 2007 года, отсутствие звуковой сигнализации отключения автомата тяги явилось причиной, способствующей инциденту. Во время захода на посадку при работе двигателей на режиме «Малый газ» автомат тяги отключился, что осталось незамеченным экипажем. На глиссаде снижения самолет потерял скорость до 82 узлов (на 20 км/час ниже VREF) и вышел на режим сваливания.
Кроме управления самолётом цифровая система управления полетом (DFCS) выдаёт на индикацию лётчикам отклонения директорных планок по крену и тангажу. Эти отклонения эквивалентны командам на рулевые машины автопилота. Поэтому, когда автопилот выключен, а лётчик пилотирует самолёт по директорным планкам, то он выполняет работу рулевой машины автопилота. Пилотирование по директорам значительно повышает точность выдерживания заданных режимов, но отучает лётчика от сканирования и анализа показаний приборов, то есть способствует деградации лётных навыков. Этому способствует политика авиакомпаний, которые во имя комфорта пассажиров запрещают своим пилотам летать с выключенными директорами даже в простых метеоусловиях. Проблема потери лётным составом навыков управления самолётом при выключенных средствах автоматизации неоднократно поднималась на международных конференциях по безопасности полётов, но воз и ныне там.
Полет самолета при несимметричной тяге
Рассмотрим поведение самолета сразу после отказа одного из двигателей и потребное управление (балансировку) для обеспечения прямолинейного полета с одним остановленным двигателем.
Пусть отказал левый двигатель. На самолет начнет действовать момент рыскания МУ ДВ, разворачивающий его влево. Возникнет скольжение на правое крыло, следовательно, и момент крена Мх b в сторону крыла с остановленным двигателем. На рисунке показано примерное изменение углов скольжения и крена при остановке левого двигателя.
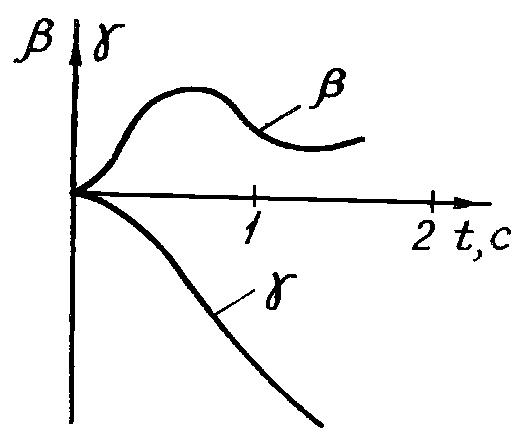
Поскольку поперечная устойчивость велика (особенно с выпущенными закрылками), то накренение будет происходить энергично, так что требуется немедленное вмешательство пилота. Для парирования кренящего момента, при работе двигателя на взлетном режиме, полного отклонения штурвала по крену недостаточно. Необходимо убрать скольжение рулем направления.
Рассмотрим, каковы условия балансировки в длительном полете с одним неработающим двигателем. Проанализируем два специфических случая балансировки в прямолинейном полете с остановленным двигателем: 1) без крена, 2) без скольжения, а также рекомендацию фирмы Боинг.
1. Полет без крена.
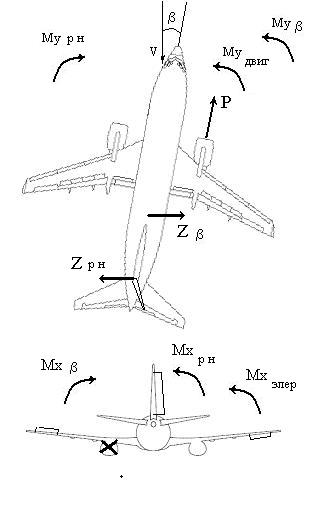
Для балансировки без крена требуется создать скольжение на левое крыло. Тогда к моменту от несимметричной тяги Му двиг прибавится момент от скольжения Му b. Их уравновешивание требует большого отклонения руля направления. Боковые силы от руля направления Z рн и от скольжения Z b будут действовать в противоположные стороны и при некотором угле скольжения уравновесятся. Поперечный момент Мх b будет компенсироваться моментами от руля направления Мх рн и элеронов Мх элер.
Казалось бы, для пилота прямолинейный полет без крена является наиболее приемлемым, но из-за большого потребного угла отклонения руля направления возрастает сопротивление самолета. Это ухудшает возможности самолета, особенно при отказе двигателя на взлете с большой массой и при высоких температурах.
Заметим, что хотя полет происходит здесь со скольжением, но шарик указателя скольжения расположится строго по центру. Дело в том, что аэродинамические силы в этом случае располагаются в плоскости симметрии самолета. Вообще говоря, данный прибор не является указателем скольжения, а является указателем боковой перегрузки. Боковая перегрузка возникает от нескомпенсированной аэродинамической силы Z, которая уравновешивается боковой составляющей силы тяжести G*sing при полете с креном или центробежной силой при развороте самолета.
2. Полет без скольжения.
Разворачивающий момент от двигателя Му двиг балансируется моментом от руля направления Му рн. Боковая сила Z рн уравновешивается боковой составляющей силы тяжести G*sing, при создании крена на правое крыло. Поперечный момент от руля направления Мх рн уравновешивается моментом от элеронов Мх элер. Заметим, отклонение элеронов в противоположную сторону, по сравнению с балансировкой без крена. Шарик в данном случае будет отклонен в сторону опущенного крыла, хотя скольжение будет отсутствовать.
Данный режим балансировки наиболее выгоден для энергетики самолета, поскольку обеспечивается минимальное сопротивление. Но точное выдерживание режима проблематично. Во-первых, у пилотов нет индикации угла скольжения, во-вторых, при изменении тяги работающего двигателя меняется разворачивающий момент, значит меняется потребное отклонение руля направления, соответственно меняется боковая сила руля направления, а значит и требуемый угол крена для его компенсации. Руководства по летной эксплуатации советских самолетов давали пилотам приблизительную цифру крена 3 – 5° на работающий двигатель.
Боинг дает другой критерий управления. Рассмотрим балансировочную диаграмму при отказе левого двигателя.
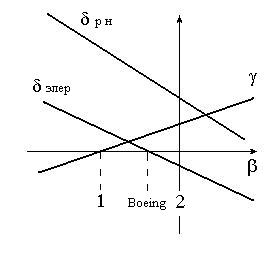
На ней цифрами 1 и 2 показаны рассмотренные случаи балансировки без крена и без скольжения. Вместе с тем существует бесконечное множество других балансировочных положений. Боинг рекомендует пилотам балансировать самолет с нулевым отклонением элеронов (level the control wheel). Пишется, что при этом наблюдается небольшой крен на работающий двигатель и шарик немного отклонен в ту же сторону. Как видно из балансировочной диаграммы, это положение является чем-то средним между двумя рассмотренными случаями балансировки. Его удобно выдерживать, поскольку для контроля «горизонтальности» штурвала необязательно даже смотреть в кабину и можно контролировать правильность положения руля направления тактильными ощущениями руки. Какая половинка штурвала опускается, значит в такую же сторону надо отклонить педали для балансировки. Точно такая же техника пилотирования при включенном автопилоте, поскольку педали от автопилота не управляются.
§
Отказобезопасность
Отказобезопасностью называется анализ влияния неисправностей на поведение самолета и возможность безопасного завершения полета.
При расследовании катастрофы 3 марта 1991 года NTSB оценил требуемые отклонения штурвала по крену для парирования следующих неисправностей системы управления:
1. Секция выдвижного предкрылка или предкрылок Крюгера не выпустились. В условиях турбулентности данный отказ, скорее всего, останется незамеченным.
2. Отказ демпфера рысканья с уводом руля направления на 2 градуса. (Максимальный угол отклонения руля направления от демпфера рысканья на сериях (300-500) – 3 градуса). Парирование требует отклонения штурвала на 20 градусов.
3. «Всплывание» интерцептора-элерона.
(Опущенный интерцептор удерживается в полете гидросистемой. Если система удержания интерцептора отказывает, то он, за счет разрежения над крылом, может приподняться над поверхностью крыла. Это называется «всплыванием».)
Парирование такого отказа требует отклонения штурвала на 25 градусов.
4. Заедание золотника рулевого привода руля направления, приведшее к отклонению руля на 10,5 градусов. Требует отклонения штурвала на 40 градусов.
5. Парирование асимметричной тяги двигателей с уводом руля направления на 8 градусов требует 30 градусов отклонения штурвала.
Общий вывод был сделан, что данные отказы не могут являться причиной потери управляемости самолета.
С точки зрения вопросов, касающихся аэродинамики самолет имеет следующие недостатки:
1. Несмотря на то, что самолет оборудован флюгарками, информация о текущем угле атаки пилотам не выдается (за исключением некоторых комплектаций самолетов серий 600 и далее). Подача такой информации значительно бы помогла в случаях ненадежной работы компьютера высотно-скоростных параметров, ошибочного ввода информации о весе самолета в навигационный компьютер (FMC), выводе самолета из сложного положения, заходе на посадку с различными отказами механизации и т. п.
2. В законе управления двигателя отсутствует прямое ограничение режима двигателя при достижении максимально допустимой температуры газов за турбиной. Поэтому в процессе роста скорости на взлёте температура газов за турбиной непрерывно увеличивается и, при взлетах в жаркую погоду с большими взлетными весами, может превысить максимально допустимое значение. Это накладывает дополнительную нагрузку на экипаж по дополнительному контролю и ручной корректировке режима двигателей на разбеге и в процессе первоначального набора высоты. Что не способствует безопасности полета.
3. Самолет имеет чрезмерную поперечную устойчивость, особенно при выпущенных закрылках. Это усложняет его пилотирование и причиняет неудобства пассажирам на взлёте и посадке в условиях порывистого бокового ветра и при полете в неспокойной атмосфере.
В качестве примера по данному пункту подходит инцидент с Боингом 737-500, авиакомпании Международные авиалинии Украины 13 февраля 2008 года.
Выполняя посадку в Хельсинки при сильном порывистом боковом ветре, командир экипажа чрезмерно энергично парируя крен, возникший от порыва ветра, допустил касание законцовкой крыла о ВПП.
На самолётах модификации NG с winglet данный недостаток ещё более усилился.
По этой же причине самолет резко реагирует креном на возникающее скольжение при отказе двигателя на взлете. При этом полного отклонения штурвала по крену не достаточно для парирования кренящего момента и необходимо без задержки отклонить руль направления для парирования возникающего скольжения. В условиях видимости естественного горизонта эта задача решается, как правило, без проблем. Но в облаках или при ограниченной видимости решение этой задачи требует специальной тренировки и достаточно непросто для пилотов привыкших пилотировать по советской системе индикации – вид с земли на самолет.
4. Согласно отчета AAIB (Air Accidents Investigation Branch) о расследовании инцидента с Боингом 737-300 авиакомпании Thomsonfly, произошедшего в Bournemouth (Великобритания) 23 сентября 2007 года, полного отклонения руля высоты не хватило для парирования кабрирующего момента от двигателей. Выводя самолет из режима сваливания, экипаж вывел двигатели на режим, превышающий полную взлетную мощность. При этом тангаж самолета увеличился до 44 градусов, несмотря на то, что командир полностью отклонил штурвальную колонку от себя. В данном случае необходима помощь стабилизатора.
5. На самолётах модификации NG крейсерское число М полёта увеличилось и вплотную приблизилось к MMO. Однако повышенная инертность самолёта (за счёт большей массы) и алгоритм работы автомата тяги таковы, что возникает реальная угроза непреднамеренного превышения MMO в крейсерском полёте в неспокойной атмосфере при усилении встречной составляющей скорости ветра.
6. Сервокомпенсатор руля высоты (elevator tab), предназначенный для уменьшения усилий на штурвале при прямом (безбустерном) управлении самолётом, может провоцировать автоколебания проводки управления. Данные случаи отмечались 1 марта 2023 года http://aviacom.ucoz.ru/publ/boeing_737/nedavnie_incidenty_s_boingom_737/1_marta_2023_goda_brjussel/8-1-0-17
и 2 апреля 2023 года
http://aviacom.ucoz.ru/publ/boeing_737/nedavnie_incidenty_s_boingom_737/povtornaja_proverka_servokompensatorov/8-1-0-15 .
Также вибрация сервокомпенсатора рассматривается, как одна из возможных причин катастрофы Боинга 737-800 в Бейруте 25 января 2023 года
http://aviacom.ucoz.ru/publ/aviakatastrofy/nedavnie_aviakatastrofy/katastrofa_boinga_737_800_v_bejrute_25_janvarja_2023_goda/7-1-0-53
Вопросы и замечания по тексту пишите: [email protected]