

- Что собой представляет квадролет
- Как выбрать fpv и почему это не так просто
- Amkov amk5000
- Sjcam sj4000 wifi
- Xiaomi yi action 4k
- Видеопередатчик и видеоприемник на 5.8 ггц для квадрокоптера
- Купить набор из передатчика и приемника для FPV полетов на квадрокоптере можно .
- Время и место
- Второй способ сборки квадрокоптера собственноручно
- Для fpv
- Для чего вам камера на дроне?
- Купить камеру для fpv полетов можно .
- Дополнительное оборудование
- Как подключить квадрокоптер к телефону. инструкция для новичка.
- Какую аппаратуру выбрать?
- Квадрокоптер с камерой своими руками: видео процесса сборки
- Квадрокоптер, зачем?
- Классные каналы
- Очки и мониторы
- Первый полет
- Прямая трансляция видео с бпла
- Разрешение tvl
- Регистрация дрона
- Составляющие аппаратуры на которые стоит обратить внимание
- Съемка
- Тип матрицы и задержка: ccd vs cmos
- Установка fpv и телеметрии на квадрокоптер
- Частоты
Что собой представляет квадролет
Для тех, кто пока еще не в теме — это конструкция, платформа, сооружение, летательный аппарат, кому как удобнее, которая (если мы говорим о платформе) управляется передатчиком. Имеет 4 двигателя с тем же количеством винтов. В сборке таких летательных аппаратов непременно присутствует летающая многомоторная платформа.
Когда беспилотник взлетает, он занимает горизонтальное положение. Как и вертолет, он способен зависать над поверхностью земли на разной высоте. Летает в разные стороны. Раньше коптеры умели летать только в сторону своего носа. В последние годы стали делать модели типа Headless, когда дрон во время полета мог резко полететь в любую из четырех сторон, не поворачиваясь в эту самую сторону своей носовой частью.
Коптер способен подниматься и опускаться, при этом он всегда остается в горизонтальном положении относительно земли. Если же на нем установлено специальное оборудование, то в некоторых случаях он может летать даже в режиме автопилота. Большинство авиалюбителей используют такие возможности, прежде всего, чтобы сосредоточиться в этот момент на аэросъемке, а не являть миру свое пилотажное мастерство.
Как выбрать fpv и почему это не так просто
Любой электронный компонент обладает рядом технических характеристик, на которые следует обращать внимание при выборе, это относится и к видеопередатчикам.
Далее мы рассмотрим 13 пунктов, которые учитывается при выборе этого важного компонента FPV системы квадрокоптера.
Выбор FPV на квадрокоптер зависит не только и не столько от цены, сколько от тех характеристик и возможностей, которые в итоге желает получить пилот.
У каждого компонента системы есть свои параметры, свои требования к совместимому оборудованию. Значение имеет тип матрицы, разрешающая способность, используемая частота, мощность передатчика.
Нужно представлять, как будет скомпонована FPV система, как организовать ее питание от аккумулятора, какой монитор или шлем выбрать. Далеко не всегда получается найти подробный обзор того или иного элемента.
Amkov amk5000
Экшн-камера Amkov amk5000 wi fi относится к одним из самых дешевых устройств. Ее стоимость в китайских онлайн магазинах составляет около 90$. Комплект поставки можно назвать исчерпывающим. Помимо разнообразных адаптеров, защелок и площадок, в комплектацию входит водонепроницаемый бокс.
Как понятно из названия, камера оснащена wi-fi модулем. Пользователь может управлять устройством, используя смартфон. И хотя дальность связи не превышает 50 метров, этого достаточно для того, чтобы активировать камеру только после взлета или выключить перед приземлением.
- Размеры 65×73х139 мм
- Вес 78 г
- Датчик изображения CMOS 14 Мп
- Угол обзора 170 градусов
- Время работы до 90 минут в режиме 1080 30p с Wi-Fi
- Функция timelapse
- Micro-HDMI и micro-USB 2.0 разъемы
- Слот для SD, SDHC карт
Качество съемки можно охарактеризовать как среднее. Объективу явно не хватает светосилы, что особенно заметно в пасмурную погоду. С другой стороны, за 100$ найти более качественный вариант, да еще и в такой богатой комплектации, вряд ли получится. Из экшн-камер начального уровня Amkov amk5000 wi fi является одной из лучших. Широкий угол обзора позволяет не упустить ничего из виду.
Отметим, что по внешнему виду amk5000 копирует Hero, что, впрочем, неудивительно.
Sjcam sj4000 wifi
Экшн-камера Sjcam sj4000 wifi недавно выпущенная в новой ревизии 2.0 отличается невысокой стоимостью (около 80$), богатой комплектацией, наличием 2-х дюймового дисплея. В комплект входят несколько креплений, водонепроницаемый бокс и даже карта памяти на 32 Гб.
Основные характеристики:
- Размеры 60×41х30 мм
- Вес 46 г
- Угол обзора 170 градусов
- Датчик изображения Aptina0330 CMOS 3 Мп
- Электронная стабилизация
- Время работы до 88 минут в режиме 1920×1080 30p
- Функция timelapse
- Детектор движения
- Micro-USB и Micro-HDMI разъемы
- Wi-Fi-модуль
- Слот для microSDHC карт
Эта одна из самых легких экшн-камер в обзоре, вес вместе с аккумулятором составляет всего 46 грамм. Качество съемки можно оценить, как среднее. При недостаточном освещении изображение оказывается темным (типичная проблема для небольших объективов). 30 кадров в секунду при разрешении 1920×1080 являются пределом для sj4000. В настройках можно менять угол обзора, но это приводит лишь к ухудшению картинки.
В целом, на свои деньги sj4000 весьма неплоха. Ее можно устанавливать на бюджетные квадрокоптеры для съемки собственных полетов. Небольшой вес позволяет уменьшить требования к грузоподъемности дрона.
Xiaomi yi action 4k
Модель Xiaomi YI action 4K является дальнейшим развитием линейки YI и на сегодняшний день является одной из самых продвинутых экшн-камер от китайского производителя электроники. Традиционно для Xiaomi, комплект поставки скромный.
Помимо YI action 4K, в него входят селфи палка и пульт Bluetooth для управления. Нет никаких креплений, подводного бокса, адаптеров. Конечно, любые переходники и адаптеры можно приобрести отдельно, но на фоне более доступных по цене конкурентов комплектация выглядит скудно.
Стоимость устройства составляет около 200$, это не самая дешевая видеокамера, но зато она поддерживает запись в 4К разрешении и известна довольно высоким качеством картинки.
- Размеры 65×42х21 мм
- Вес 95 г
- Угол обзора 155 градусов
- Датчик изображения CMOS ½,3″ 12 Мп (Sony IMX377)
- Электронная стабилизация
- Процессор Ambarella A9SE75
- Светосила F2.8
- Время работы до 110 минут в режиме 3840×2160 30p
- Функция timelapse
- Micro-USB разъем
- Двух диапазонный Wi-Fi-модуль Broadcom BCM43340
- Слот для microSDHC/SDXC карт
Xiaomi YI action 4K можно использовать даже для FPV управления, выбрав пункт «Режим прямой видеотрансляции» в меню приложения. Правда, дальность связи не превышает 50 метров, так что далеко улететь не получится.
Снимать видео с помощью Xiaomi YI совершенно не сложно. Настройки, в том числе и расширенные, доступны в меню приложения, но можно использовать и качественный сенсорный экран самой камеры. Все режимы съемки работают без нареканий. Электронная стабилизация позволяет добиться более плавного изображения, но приводит к уменьшению размера кадра.
Видеопередатчик и видеоприемник на 5.8 ггц для квадрокоптера
Чем выше мощность передатчика, тем большая дальность передачи видеосигнала. В продаже есть модели на 25mW, 100mW, 200mW и так далее.
Особенность заключается в том, что для увеличения дальности в 2 раза, мощность должна возрасти в 4 раза. Соответственно, если передатчика на 200mW хватает для транслирования видео на расстояние в 1 км, то для организации передачи сигнала на 2 км придется брать 800mW передатчик.
Купить набор из передатчика и приемника для FPV полетов на квадрокоптере можно .
Я использую такой же комплект для полетов, причем летаю с ним как на квадрокоптере, так и на авиамоделях.
Время и место
Лучшим временем для любой съемки считаются два часа после рассвета и два часа перед закатом. Свет в это время ложится мягко, а небосвод играет теплыми тонами. Фотографии и видео при таких условиях получаются уютными и нежными. Для запуска лучше воспользоваться укромным местом, что позволит спокойно, без спешки подготовить дрон и настроиться на нужный творческий лад.
Раннее утро подходит для запуска дрона в городе лучше всего. Людей еще нет, но свет уже хороший.
Не запускайте дрон возле режимных объектов и аэродромов — это незаконно. Также сторонитесь и огороженных территорий, ведь в случае непредвиденной посадки за забором коптер трудно будет достать. Также, по возможности, следует избегать мест с геомагнитными полями, нарушающими функционирование компаса.
Второй способ сборки квадрокоптера собственноручно
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Как мы говорили ранее, система является мультироторной. Эти самые роторы создают мощное диагональное вращение в противоположных направлениях. У роторов имеется так называемый управленец, собирающий информацию с трех или с шести гироскопов (количество последних зависит от конфигурации коптера) и передает ее роторам.
Гироскопы были созданы для того, чтобы автоматически определять положение аппарата во время полета и затем фиксировать его во всех трех плоскостях. При этом акселерометр делает так, чтобы коптер занял идеальное положение по горизонтали. Чтобы закрепить квадрокоптер на определенной высоте, полетная система оборудуется бародатчиком.
За счет этого происходит движение коптера, если все четыре винта крутятся одинаково. Результатом смены скорости вращения той или иной пары моторов становится наклон коптера (как его еще называют — «крен») в сторону наиболее слабо крутящихся винтов — дрон летит по горизонтали.
Итак, общее представление о деталях и модулях будущего квадрокоптера уже сложилось, теперь настала пора поделиться с вами тем, как же собрать дрон собственноручно.
Первое, что приходит на ум при сборке собственного квадрика, конечно же, его рама. Ничего сложного с этим элементом нет. Для ее основы сойдет обычная фанера размером 15 квадратных сантиметров. Лучи приспособляются с помощью винтов по диагональной разметке вашей рамы.
В первую очередь устанавливаем управляющую плату. При этом разместите ее как можно ближе к центру вашей платформы. С самого начала сделайте необходимые, и самое главное, точные замеры. В этом случае аппарат не будет заносить из стороны в сторону во время полета. Используйте саморезы достаточной длины, для того чтобы прикрутить лучи к плате. Ленточка из алюминия подойдет для посадочных лыж и держания аккумулятора.
Установите приемник вплотную к плате. Чтобы установить приемник, можно использовать какой-нибудь мощный суперклей. Упрощенный вариант соединения двумя трехжильными шлейфами возможен в том случае, когда приемочные каналы по своему назначению такие же, как и каналы управляющей платы. Имейте это в виду.
Неважно, каким способом вы будете собирать свой первый летательный аппарат, одно вам надо запомнить — не жалейте денег на детали, из которых будете собирать дрон. Только в этом случае, с большей долей вероятности, сборка получится качественной и незначительные неточности и погрешности вам будут прощены.
При сборке квадрокоптера вторым способом мы рассмотрим пошаговый вариант сборки с использованием Arduino Mega, прошивки Мега-Пират.
Что потребуется для сборки? 5 моторов, включая 1 запасной. Приобретите также два комплекта лопастей — один рабочий, второй для запаса. Напоминаем вам, что там должно быть два обычных винта и два с обратным вращением. Регуляторы скорости. Их должно быть не менее четырех штук и, опять же, как минимум столько же запасных.
Советуем использовать несколько легких и маленьких. Да, дрон будет меньше летать в течение одного жизненного цикла такого мини-аккмулятора, но при этом полет у вас будет более стабильным. Тем более, что процесс замены аккумулятора не займет много времени.
Рама для вашего квадрокоптера должна быть легкой и одновременно с этим прочной. Вспомните то, какую раму мы описали в первом случае самостоятельной сборки. Так вот, такая рама вполне подойдет и для этого варианта. Из электронной начинки необходимы будут: плата «все в одном», акселерометр, батареи, микроконтроллер, гироскоп, а также множество болтиков, винтов, проводков и различного вида стяжек. Не забудьте также про паяльник и дрель.
Когда вы убедитесь в том, что все необходимое у вас имеется в наличии, можно смело приступать к сборке. Процесс сборки можно повторить, пользуясь первым методом, который был описан выше. Самое главное, чтобы от каждого конца луча и до центра рамы расстояние было одинаковым.
Если вы вмонтируете ваши датчики в резину или, скажем, в силиконовую массу, то этим самым сила вибрации во время работы пропеллеров будет погашена. В качестве шасси можно сделать и закрепить пенопласт на самых концах лучей. Для более мягкой посадки их можно прорезинить или прикрепить поролон.
Если вы не хотите собирать плату самостоятельно, то мы рекомендуем купить готовую. На ней уже установлено 4 датчика, гироскоп, который будет замерять угловое ускорение, акселерометр, измеряющий ускорение, барометр, отвечающий за выборы нужной высоты и удерживающий квадрокоптер именно на ней, а так же магнитометр, отвечающий за то, куда будет лететь дрон.
Для fpv
Полный Fpv комплект для квадрокоптера состоит из:
- Передатчика
- Приемника
- Камеры с видеовыходом
- Антенн
- Монитора (шлема, очков)
- Аккумуляторы для приемника и монитора
Все это оборудование размещается на коптере и на пульте управления. Продвинутые модели квадрокоптеров позволяют подключать FPV аппаратуру к собственной сети питания. Время полета при этом снижается, но зато можно обойтись без отдельного аккумулятора.
Собрать FPV набор можно и самостоятельно (и об этом еще пойдет речь в нашей статье), но начинающим пилотам лучше выбрать готовые дроны. В продаже доступны совсем недорогие модели, которые помогут получить представление об ФПВ управлении. Кстати, совершенно не факт, что управление дроном от первого лица вам понравится, поэтому нет смысла сразу тратиться на дорогой беспилотник.
Для чего вам камера на дроне?
Такая схема позволит минимизировать появления помех от работы контроллера и передатчика.
Если же ваш видеопередатчик квадратного форм-фактора, то достаточно будет просто скрутить провода спиралью.
Купить камеру для fpv полетов можно .
Эта камера позволит видеть так, как будто вы пилотируете квадрокоптер сидя в его кабине. Весьма занимательное занятие — можно сказать полный полет и отрыв и полная безопасность! Максимум чем вы рискуете — это самим квадрокоптером, пилоты же рискуют жизнью.
Рекомендую так же посмотреть статью Камеры для FPV полетов на квадрокоптере.
Камера для дрона может использоваться для решения многих задач, которые условно разделяются на 2 глобальные группы:
- Фото и видео съемка, а также обзор местности, над которой летит дрон
- FPV управление
В продвинутых моделях летательных аппаратов могут одновременно использоваться две камеры (и даже больше). Одна обеспечивает FPV управление, тогда как вторая ведет качественную съемку. Такое разделение возникло не случайно. Экшн-камеры, часто устанавливаемые на дроны, в большинстве своем способны только снимать, но не могут передавать видеосигнал на монитор. Либо же делают это с некоторыми ограничениями. Проблема решается покупкой FPV оборудования.
Такие производители как Walkera, DJI, Xiaomi и некоторые другие комплектуют свои квадрокоптеры универсальной аппаратурой, умеющей как снимать, так и передавать видео сигнал. Недостаток в данном случае заключается в том, что съемка ведется в цифровом формате, используются алгоритмы сжатия изображения, и только после обработки процессором данные передаются.
Все это приводит к задержке. Для неторопливых полетов на открытом воздухе секундная задержка не имеет критического значения. Такое видео нельзя назвать реальным и, хотя производитель коптера обещает FPV управление, в действительности пилот получает сигнал не сразу.
Аналоговые FPV комплекты для квадрокоптеров работают с минимальной задержкой. Видеопоток не обрабатывается, а сразу транслируется на аппаратуру управления. Для гоночных дронов, для полетов в окружении большого количества потенциальных препятствий (например, плотная городская застройка, лес), для профессиональной видеосъемки все это имеет большое значение.
Итак, выбор обуславливается теми задачами, что будут решаться. Для качественной съемки в комплектацию необходимо включить хорошую экшн-камеру с 3-х осевым подвесом, тогда как для настоящего управления «от первого лица» необходима аналоговая FPV-аппаратура.
На выбор доступны десятки, если не сотни камер для дронов. К самым известным производителям относятся компании Runcam, Foxeer, Caddx, Aomway, Boscam. Помимо видеоаппаратуры, они производят и другое FPV оборудование.
В наш топ вошли следующие устройства:
- Runcam Eagle 2 (Full, Micro)
- Foxeer Predator (Mini, Micro)
- Caddx SDR1 (Mini, Micro)
- Runcam Swift 2 (Full, Mini, Micro)
- Foxeer Predator Arrow V3 (Full, Mini, Micro)
- Caddx S1 (Mini, Micro)
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.
Дополнительное оборудование
Время полета дрона при полностью заряженном аккумуляторе зависит от модели — обычно это от 5 до 30 минут. Поэтому для длительной съемки возьмите с собой пару-тройку запасных аккумуляторов или пауэрбанк для подзарядки. И не дожидайтесь полной разрядки батареи во время полета, иначе дрон просто упадет.
Фильтр нейтральной плотности или ND-фильтр — полезный аксессуар для камеры квадрокоптера. Он поглощает часть проходящего сквозь него света без влияния на цветопередачу. Это дает возможность увеличивать время экспозиции, что немаловажно при съемке с дрона. Без использования ND-фильтров практически невозможно добиться качественной видеосъемки при высокой освещенности.
Как подключить квадрокоптер к телефону. инструкция для новичка.
Как подключить квадрокоптер к телефону, к нам очень часто обращаются пользователи с этим вопросом. Актуальность этой задачи подтверждается тем, что хотя большинство современных дронов комплектуется RC контроллерами, но есть целый ряд моделей, связь с которыми поддерживается через смартфон и специальные приложения к нему.
Чаще всего для работы с БПЛА подобного типа применяется канал wi-fi. Этот способ управления широко используются при полетах на небольшие расстояния, создавая новые возможности и идеи для моделей потребительского класса. Отметим, что мобильные устройства применяются не только для управления летательным аппаратом, но и для его настройки, активации различных режимов полета, работы с подвесом и видеокамерой.
Какую аппаратуру выбрать?
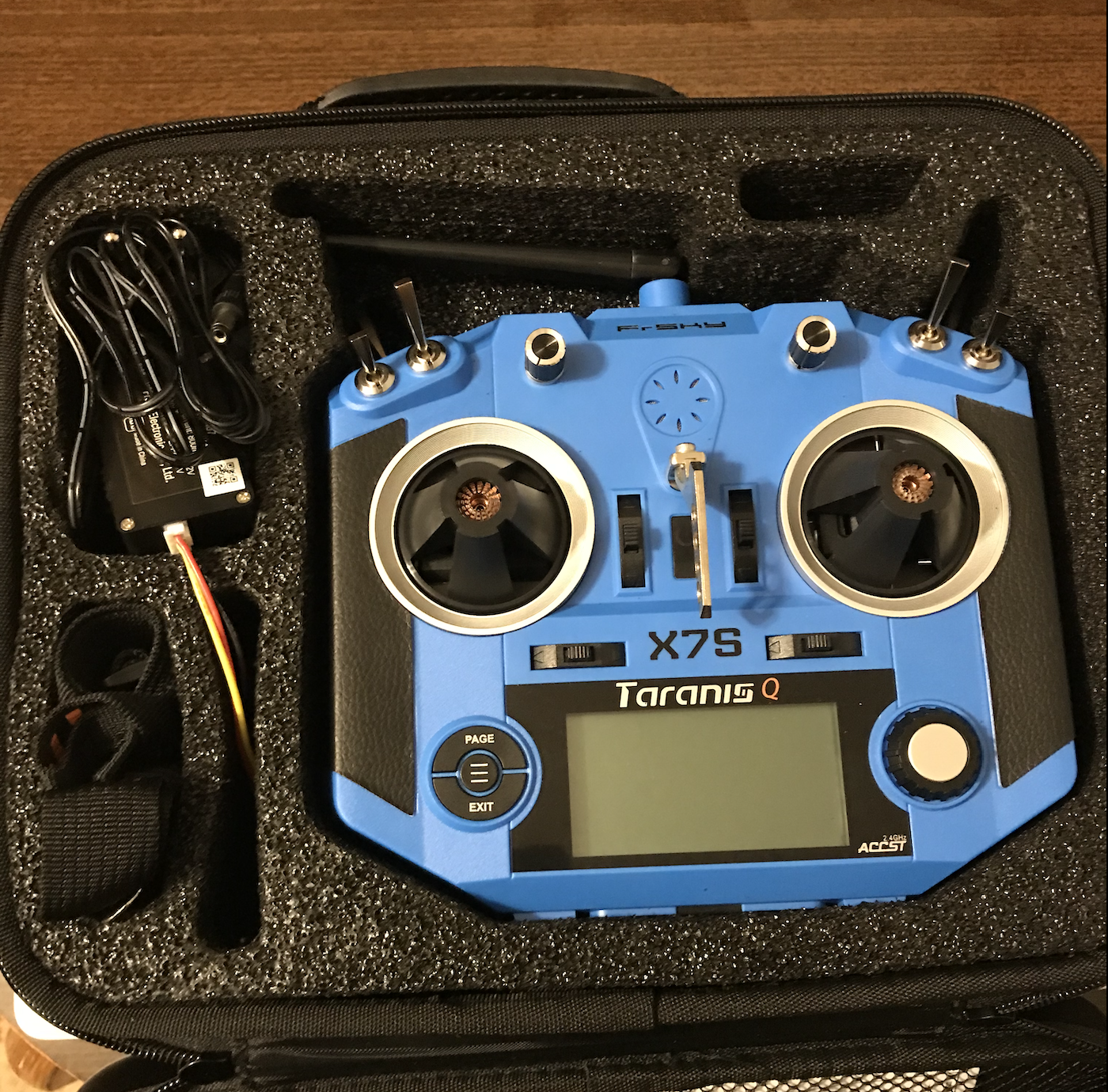
(Taranis Q X7S)
Честно сказать, так как я не эксперт, а аппаратуры очень много, всевозможное обилие разных фишек и различия протоколов передачи данных, могут завести в дикий тупик. Не говоря уже о маркетинговых ходах и конкуренция между производителями. Поэтому я исходил из базовых вещей, которые смог понять, плюс рекомендаций сообщества.
Буквально все, кого я читал и смотрел, рекомендуют Taranis Q X7. Это отличная аппаратура, которая относительно не дорогая и обладает всем, что может понадобиться новичку. А самое главное, она хорошо известна радиолюбителям. Про нее много информации в интернете и вам наверняка кто-то поможет, если будут какие-то проблемы.
Квадрокоптер с камерой своими руками: видео процесса сборки
Если вы последуете кратким инструкциям по сборке Ардуино Уно, изложенными ниже, то на выходе вы получите беспилотный четырехлучевой аппарат с 30 минутным полетным временем, размерами 60 сантиметров (152 дюйма) от мотора до мотора. Он будет весить чуть больше одного килограмма.
Для рамы нужно использовать тонкие лучи, выпиленные из обычных деревянных досок. Приблизительная толщина одного такого луча должна составлять 1-1.5 сантиметра сверху и около 3-4 сантиметров, если смотреть на луч сбоку. Сделайте две одинаковые заготовки длиной 60 сантиметров каждая и при помощи вырезки отверстия в центре одной из них прочно закрепите оба луча между собой. Можно запаять их, склеить и так далее.
После этого, для своего удобства, вы можете покрасить лучи двумя различными цветами. Например, желтым покрасьте передние два луча, а красным или черным те лучи, которые после сборки окажутся тыльной стороной беспилотника.
Силовую плату необходимо будет установить на перекрестке вашей рамы. Она должна быть закреплена по центру, в нижней части креста. С помощью пластиковых ремешков, длину которых можно регулировать, прикрепите эту плату к корпусу с двух сторон. Этого будет достаточно, чтобы плата не слетела и стабильно выполняла свое основное предназначение. Пусть вас не смущает, что она может двигаться и смещаться со своего места на пару миллиметров или даже на 1 сантиметр.
После этого вам необходимо будет установить 4 электронных контроллера скорости от HobbyKing — вес каждого составляет всего лишь 16 грамм. Надежно прикрепите их возле края каждого из лучей. Для этого цели вполне подойдет тот же пластиковый регулируемый ремешок, с помощью которого вы закрепили силовую плату.
На конце каждого из лучей следует прикрепить специальную крышечку с отверстием, в которую вы установите двигатели и пропеллеры. В качестве фиксирующего материала снова же используйте ремешки. Закрепите крышку на совесть, чтобы не слетела при первом же запуске моторов.
Контрольная панель, собранная из нескольких важных электронных элементов (схему сборки смотрите на иллюстрации) прикрепляется к верху при помощи пластиковых ремешков. У вашей платы должно быть по два отверстия с каждой из четырех сторон, для того чтобы надежно прикрепить ее к каждому лучу.
В конечном итоге, в центральной части вашего самодельного квадролета окажутся две платы. Одна силовая, установлена внизу крепления, вторая — контрольная панель, закрепленная в верхней части пересеченных лучей вашего коптера.
Чтобы смягчить и подавить вибрацию моторов, которые будут оказывать не совсем хорошее влияние на вашу электронику, необходимо сделать антивибрационные демпферы. Для этих целей можно использовать обычные силиконовые затычки-беруши. Они продаются в любой аптеке. Вам понадобится набор из четырех таких беруш, чтобы установить их под каждое крепление контрольной печатной платы.
Сделать это лучше следующим образом. Перед тем как вы начнете затягивать укрепляющие ремешки на каждой из четырех сторон своей платы, подложите силиконовую затычку так, чтобы она оказалась под самой платой и при этом лежала на луче. В этом случае она выполнит роль своеобразной прокладки между этими двумя жесткими элементами и сможет поглощать вибрацию.
Чтобы закрепить берушу между платой и крестовиной мультикоптера, просуньте в отверстия платы пластиковый ремешок, выровняйте берушу и затяните ремешок таким образом, чтобы он смог закрепить не только печатную плату на крестовине, но еще и прижал с двух сторон саму затычку.
Теперь приступим к установке батарей. Можно использовать два аккумулятора Zippy Compact. Емкость каждой из них составляет 3700 миллиампер часов. Если же использовать их обе, то она возрастет вдвое. В итоге мы получим 7400 мАч и почти 30 минут полного полета.
Для закрепления батарей потребуется скотч и длинный пластиковый ремешок (всего один, но зато более широкий, чем те, которыми вы закрепляли детали до этого). Аккумуляторы следует прикрепить таким образом, чтобы они заняли диагональную позицию, то есть крепились не к какому-либо лучу, а сразу к обоим.
Понятно, что лучшим местом для этого будет та же крестовина в центре. Так как между контрольной печатной схемой и самой крестовиной останется свободное пространство, полученное благодаря высоте затычек-беруш, в эту щель вам как раз и надо будет просунуть ремешок, для того чтобы прикрепить аккумуляторы к конструкции.
До этого вам нужно будет положить один аккумулятор на другой, а сверху добавить обычную мягкую губку, которая используется для перевозки бьющихся деталей, провести под ними пластиковый ремешок, а сверху него наклеить прочный скотч. Это позволит закрепить ремешок на одном месте, чтобы батареи не соскользнули с него, и приклеить батареи друг к дружке.
Далее мы прикладываем батареи плотно ко дну корпуса, просовываем ремешок в отверстие под платой сверху. Туго его затягиваем. Если нужно, еще раз проверяем конструкцию на прочность. Губка будет также выполнять роль подавления вибрации, которая может возникнуть между лучами квадролета, аккумуляторами и силовой платой на дне конструкции.
В специальные крышки на концах лучей теперь можно установить 25-миллиметровые двигатели и надеть на них пропеллеры. Ваша рама уже покрашена в два разных цвета, для того чтобы лучше ориентироваться, где у аппарата перед, а где зад. Но для более точной ориентации можно использовать оранжевый или белый шарик для игры в настольный теннис.
Для этого от одного переднего луча до другого нужно провести обыкновенную проволоку и закрепить каждый ее конец приблизительно под контроллерами скорости. В центре проволоки уже должен находиться крепко нанизанный на нее шарик.
Все, ваш Ардуино готов к полету. Как говорилось выше, его полетный вес составил 1054 грамма. Время полета при таком весе — 30 минут и несколько секунд.
При конструкции квадрокоптера не учли наличие посадочных шасси. В принципе, они не нужны, потому что у дрона не установлена камера к его брюху, а защищать батареи и заморачиваться ради них приделыванием ног не стоит. Все, что нужно вам будет сделать, это точно рассчитать, когда истекут 30 минут полета, и вовремя мягко посадить систему на землю.
Для начала придется не только приобрести необходимые компоненты, но и еще кое-что сделать собственными руками. Из подручных материалов можно сделать дешевый, но вполне себе надежный каркас для будущего коптера.
https://www.youtube.com/watch?v=mKpS2JoBOYQ
Лучше всего подойдет небольшой кусок ДВП. Из него будет проще выпиливать необходимого размера куски прямоугольной формы. Сделанные рамки и стойки из этого материала достаточно будет склеить обычным термоклеем.
В качестве контактов подойдут обычные швейные иглы, к основаниям которых следует припаять электрические провода. Вы также не сможете обойтись без программатора USB asp с SPI интерфейсом.
Электронные скоростные регуляторы — в принципе, можно приобрести Hobbywing Program Supportable 10A бесколлекторные контроллеры для радиоуправляемых моделей. Такие обычно продают в китайских Интернет-магазинах типа «Али экспресс». Итак, с них надо снять термоусадку, под которой находятся транзисторы и контроллер на ANMEGA 8.
В качестве лучей подойдут обычные рейки, которые нужно скрепить между собой по центру, сделать разметки в местах моторов и затем просверлить в этих местах отверстия.
В каждое такое отверстие вставляем маленькие двигатели и заполняем пустое пространство (если оно будет) при помощи термоклея. Вырезаем небольшие куски фанеры, размеры которых должны соответствовать размерам концов лучей, и наклеиваем их на каждый луч, насаживая на торец, как бы изолируя моторы от коптера. Обратите внимание, что наклеить их нужно на нижнюю часть будущего дрона.
Теперь в каждом из этих изоляторов необходимо просверлить отверстия и просунуть в них провода двигателей, чтобы зафиксировать их на раме и чтобы они не путались и случайно не попали под пропеллеры во время полета.
Надеваем винты. Внимание, учитывайте направление вращения пропеллеров. На передних лучах левый должен вертеться по часовой, а правый — против часовой стрелки. На задних левый вращается против часовой, а правый — по часовой.
Теперь на верхнюю площадку необходимо установить печатную плату. Предварительно делаем основание из мягкого материала, склеиваем плату с основанием и прикрепляем к площадке. В нижней части под платой установите аккумулятор. Проделываем необходимые работы по соединению платы с двигателями и батареей.
Для надежности, чтобы провода не распускались, окончательно закрепляем их к лучам при помощи обычного прозрачного скотча. При желании, вы можете припаять световые диоды к дрону. На краях платы есть специальные разъемы (4шт.), к которым и нужно подсоединить LED фонарики. Все, коптер готов к полету.
Квадрокоптер, зачем?
Наверняка вам уже знакомо, что такое квадрокоптер и возможно он даже у вас есть. Но сегодня я постараюсь рассказать про квадрокоптеры которые люди собирают самостоятельно. Зачем они это делают, спросите вы? Например для меня это отдушина от сдвиганья кнопки на пиксель влево, на пиксель вправо, пока дизайнера не отпустит.
“Обычные”, потребительские квадрокоптеры, лишены веселья. Сейчас конечно уже появляются разные конфигурации, но если взять самые популярные, например — DJI Mavic, то вопросов к качеству и выполняемым им задачам нет. Но это не то. У себя между ног, пролелеть не получится, cделать мертвую петлю или хотя бы бочку не выйдет, лететь со скоростью 120км , не знаю, может? Думаю нет. Я уже не говорю про дальность и FPV.
В общем, ограничений много и хочется собрать квадрокоптер который будет доставлять вам удовольствие. Возможно вы хотите учавствовать в гонках, снимать более динамические кадры или просто нанюхаться флюса пока припаиваете моторы. В любом случае, чувство полета птицы и веселья гарантированно только со своим, собранным своими руками квадрокоптером.
Как говорится, лучше один раз увидеть, чем сто раз услышать. Предлагаю вашему вниманию ряд видео, разного жанра:
MinChan FPV готовится к гонке (это не ускоренное видео)
Фристаил
Cinematic FPV съемка
Классные каналы
Joshua Bardwell — от того как паять, до как летать и настраивать коптер. Много технической инфы.Rotor Riot — канал команды Rotor Riot.Mr Steele — фристаилJohnny FPV — FPV сьемка
Русскоязычные каналы:Mustfly — FPV фристайл и гонки, в том числе и на маленьких «комнатных» микро квадрокоптерах. Канал ведет команда FPV энтузиастов из Москвы.Сергей Белаш — настоящие FPV приключения, множество интересных мест в России и мире, природа и заброшки с необычного ракурса.
Очки и мониторы
Чем дороже монитор или очки, тем более качественную картинку они предоставляют. Простенький FPV монитор с небольшой диагональю, бликами, плохо читаемым текстом будет скорее мешать, чем помогать в управлении. Тоже самое справедливо и в отношении дешевых видео очков с низкой частотой и не самыми качественными экранами.
OSD является чрезвычайно полезным устройством, благодаря которому можно получать техническую информацию о состоянии квадрокоптера. Небольшая OSD плата (on-screen-display) подключается к датчикам (скорости, напряжения аккумулятора, потребляемом токе, GPS и т.д.), расположенным на полетном контроллере. Также она подключается и к передатчику.
Пилот получает OSD информацию прямо на экран монитора или на очки. Он может добавлять или убирать отдельные показатели, если они ему не нужны.
Продвинутые модели квадрокоптеров могут быть оснащены собственными OSD платами (либо такая функциональность реализуется на плате полетного контроллера).
Первый полет
Для начала откалибруйте датчики дрона и настройки полетных характеристик: скорости, максимальной высоты, дальности полета и прочего — подробно о том, как это сделать, написано в инструкции к квадрокоптеру. Наверняка вам сразу же захочется сделать эпичные кадры и видео бушующей стихии, но на первых порах лучше обойтись без этого, иначе эксперименты закончатся, не успев начаться. Начинайте запуски днем в хорошую погоду без сильного ветра и дождя, чтобы не потерять устройство.
Затем нужно выбрать подходящее место для запуска. Помните, что запускаются дроны с земли, а не из рук. Для этого подойдет сухое ровное пространство без препятствий, за которые могут зацепиться пропеллеры. Это же место будет точкой посадки для коптера с функцией возврата на исходное место.
Не снимайте возле больших водоемов, между зданиями или деревьями на первых порах. Да, именно в таких местах получаются интересные фото с большим количеством деталей или невероятно «свободные» видео. Но для тренировок лучше выбрать парк с обширными газонами, поле, пустырь — так вы не повредите дрон в первый же день.
Выучите назначение всех джойстиков и кнопок на ПДУ, чтобы управлять вслепую. Ведь вам придется постоянно держать гаджет в поле зрения, следить за его местоположением относительно различных препятствий и воздействием ветра на движение.
Откалибровали и с местом все в порядке? Поднимите коптер на пару метров, чтобы прочувствовать динамику движения, ощутить отклонения при порывах ветра и научиться выполнять корректировку положения устройства с поправкой на ветер. Оставаясь на этой же высоте, поперемещайте квадрокоптер вперед-назад в горизонтальной плоскости. Затем вправо-влево и совершите разворот вокруг собственной оси.
Прямая трансляция видео с бпла
Большинство дронов с камерой обладают способностью к передаче потокового видео. Этот механизм универсален и хорошо подходит для трансляции спортивных состязаний, обеспечения общественной безопасности, мониторинга скоплений людей в реальном масштабе времени и других задач.
Бюджетные беспилотники с камерой обеспечивают передачу видео по каналу wi-fi. Приемником служит мобильное устройство (планшет или смартфон). Это удобно тем, что один из этих гаджетов у оператора обычно уже есть. Таким образом, организация связи с квадрокоптером по wi-fi дает потребителю существенную экономию средств при приемлемом качестве воспроизведения.
На больших дальностях полета такой способ передачи может вносить временную задержку в 2-3 секунды. Впрочем, обычно дроны с wi-fi управлением не способны улетать от пилота на значительное расстояние.
Разрешение tvl
В эпоху цифрового видео мы привыкли к тому, что разрешение матрицы выражается через пиксели (1980×1080 и так далее). Для аналоговых устройств используется параметр TVL, то есть количество горизонтальных линий, помещающихся в кадре (или количество возможных переходов между цветами).
Чем больше значение TVL, тем качественнее изображение, однако в случае с first-person-video гнаться за максимальными показателями не нужно. Чем выше разрешение, тем больше цена камеры, и, что важнее, больше задержка видеосигнала. Ограничения накладываются и аналоговым 5.
Камеры для дрона обычно имеют разрешение 600TVL, 700TVL, 800TVL.
Регистрация дрона
27 сентября 2023 года в силу вступило новое постановление Правительства Российской Федерации об обязательной регистрации беспилотных воздушных судов. Теперь каждый владелец квадрокоптера весом от 250 г до 30 кг обязан в течение 10 дней после покупки поставить гаджет на учет, написав заявление в Федеральное агентство воздушного транспорта. Как это сделать подробно описал портал Госуслуги.
Также перед началом использования лучше зафиксировать дрон в системе геопространственной информации DJI GEO System. Она в режиме полета через приложение на вашем смартфоне или планшете покажет запретные и разрешенные зоны для полетов. Регистрировать коптер предпочтительно на улице, так как в здании сигнал спутника может быть ослаблен.
Составляющие аппаратуры на которые стоит обратить внимание
Выбор аппаратуры это дело вкуса, может быть вам не нравится Taranis. Поэтому для себя я выделил несколько критериев, которые помогут вам определиться.
Первое это прошивка. Существует open source проект, который называется OpenTX.
OpenTX — это своего рода Android для аппаратуры. Проект развивается и пожалуй самый популярный. Так как я новичок, я еще не осознал насколько это мощный инструмент, но знаю, что есть поддержка LUA скриптов, а значит возможности практически безграничны.

(один из экранов OpenTX)
Стоит обратить внимание на переключатели и стики. Количество переключателей — дело сугубо индивидуальное, так как переключателей для квадрокоптера много не нужно. В моем случае я использую всего два. Один для арминга (аля включение двигателей) и включение FPV модуля.
Стики, вещь более деликатная. Основное отличие которое может быть, это внутреннее устройство.
“Простые” стики используют потенциометры для определения положения стика. Более продвинутые стики используют датчики на основе эффекта Холла. Такие стики более точные и плавные в ходе. В случае с Taranis Q X7, стики можно купить отдельно и заменить. Но есть версия Q X7, в которой уже стоят такие стики.
И как по мне самое главное, это возможность установки радио модуля. В каждой аппаратуре есть свой радио модуль, но как правило брендированный и работает только с приемниками того же бренда. Так же такие модуля не отличаются мощностью, а следовательно дальностью.
Поэтому обращайте внимание на протоколы с которыми умеет работать аппаратура и возможность вставки своего модуля.Это не означает, что без внешнего радио модуля не обойтись, то, что предоставляет аппаратура вполне, хватает для полетать в поле. Но если вы хотите летать в «космосе», на какой-то заброшенной стройке, или на дальние расстояния, то без этого никуда. Впрочем, многие гонщики ставят внешний модуль, только ради стабильности связи.
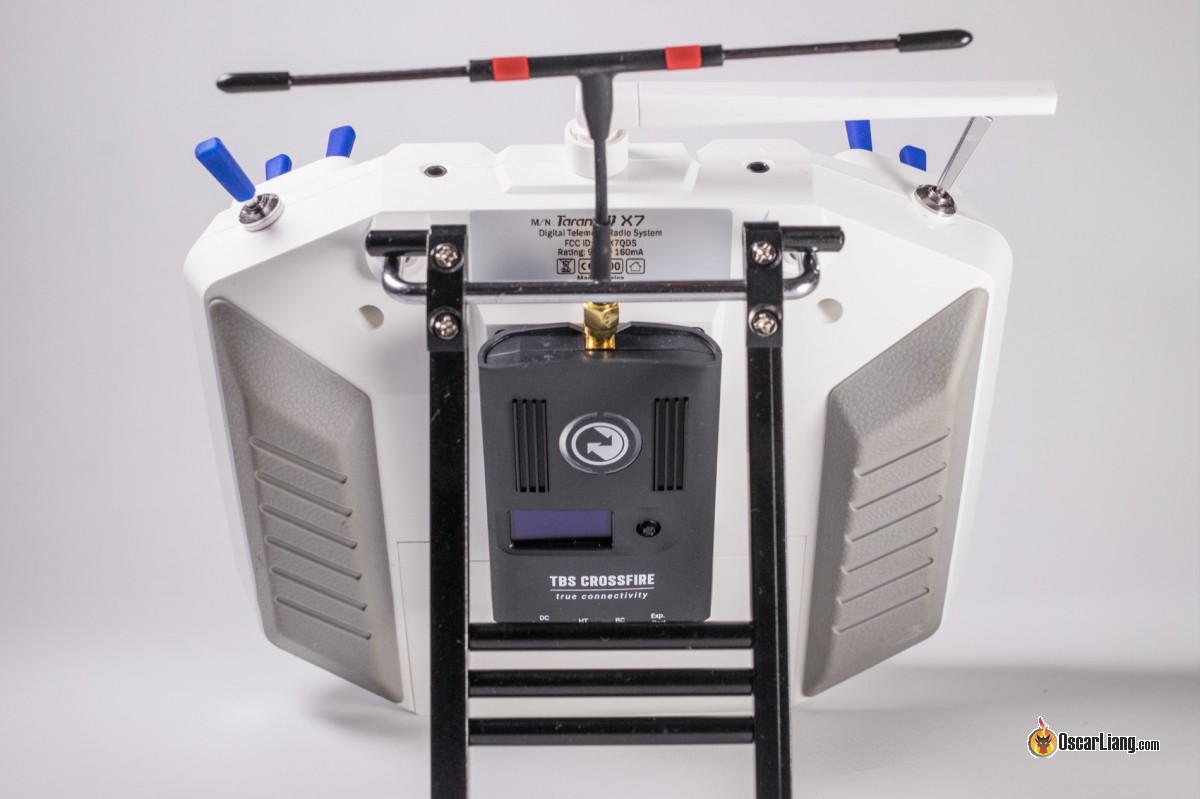
(Taranis с TBS Crossfire модулем)
Съемка
Большая часть квадрокоптеров оснащена камерой, однако у камер бюджетных моделей низкая разрешающая способность и зачастую положение камеры относительно дрона не меняется. Поэтому для получения более качественного фото- и видеоматериала при ограниченном бюджете можно приобрести недорогой дрон и экшн-камеру с высоким разрешением.
Настройка позиции камеры производится до запуска дрона и в ходе эксплуатации не меняется. Динамика видео создается маневрированием дроном, а не камерой. Можно воспользоваться готовыми траекториями движения и их комбинациями, активировав их на пульте коптера.
А для приобретения основных навыков управления коптером попробуйте несколько простых приемов. Например:
Комбинация «камера вниз набор высоты» позволит снять динамически увеличивающуюся панораму.
Совмещение набора высоты и легкого вращения с опущенной вниз камерой снимет отдаляющуюся землю с эффектом головокружения.
Движением вверх с камерой «строго в горизонт» можно заснять дальний план с линией горизонта.
Тип матрицы и задержка: ccd vs cmos
О задержке мы уже вкратце говорили в начале статьи. На сегодняшний день нет доступных по цене решений, с помощью которых можно было бы с минимальной задержкой транслировать сигнал с цифровой HD камеры на пульт или смартфон. Лаг неизбежен, и он может оказаться довольно значительным – до нескольких секунд.
Камеры могут использовать один из двух типов сенсоров – CMOS либо CCD. Для FPV оборудования обычно используются CCD матрицы в силу следующих факторов:
- Лучшие возможности для управления экспозицией
- Не так выражен эффект «желе»
- Меньший уровень шума при недостаточном освещении
В свою очередь CMOS (широко применяются в цифровых HD видеокамерах) отличаются:
- Более высоким разрешением
- Лучшей цветопередачей
- Более высокой частотой кадров
- Меньшим энергопотреблением
Для полетов по FPV преимущества CMOS (помимо уменьшенного энергопотребления) не очень важны. Именно поэтому в рейтинги лучших видеокамер для управления от первого лица входят решения на базе CCD матриц.
Установка fpv и телеметрии на квадрокоптер
Данная статья является продолжением статьи
«Квадрокоптер на MultiWii SE v2.5 — от задумки до первого полёта»
, в ней я поделюсь с Вами своим опытом установки и настройки FPV оборудования на квадрокоптер для полётов от первого лица. Заинтересовавшихся прошу под кат.


Используемые комплектующие:
1. Приёмник/передатчик Boscam 5.8Ghz 200mW 8 Channel FPV Audio Video Transmitter & Receiver TS351 RC805 2Km
2. Телеметрия CRIUS MAVLink-OSD v2.2
3. CRIUS NEO-6 GPS v3.0 I2C-GPS NAV Module v1.1
4. FPV монитор (использовал старый телевизор)
5. FPV камера (использовал уличную камеру видеонаблюдения)
Передатчик TS351, телеметрию MAVLink-OSD и камеру подключаем к MultiWii SE v2.5 по схеме ниже:


Модуль GPS NEO-6 подключаем к модулю I2C-GPS в разъём «GPS», а модуль I2C-GPS через разъём «FC» подключаем к MultiWii в разъём «I2C».




Проверка модуля GPS NEO-6 на работоспособность: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, 5V к VCC) к PC; запускаем на PC установленную программу «u-center» (ссылка на прогу в конце статьи); выбираем автоматическую скорость передачи данных -> нажимаем «Autobauding» (цифра «1»); выбираем COM порт, к которому подключен модуль GPS NEO-6 (цифра «2»); ждём…, если всё сделали правильно, через некоторое время начнут поступать данные от модуля GPS NEO-6 (цифра «3»), у меня уже через 3-4 мин. пошли данные.

Прошивка телеметрии MAVLink-OSD: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, 5V к VCC) к PC; запускаем на PC программу «Arduino IDE»; открываем прошивку «KV_Team_OSD_2.3» (ссылка на прошивку в конце статьи) — запускать нужно файл KV_Team_OSD_2.3/KV_Team_OSD/KV_Team_OSD.ino; прошиваем… Далее нужно прошить шрифты; запускаем KV_Team_OSD_2.3/KV_Team_GUI; выбираем COM порт, к которому подключен модуль MAVLink-OSD; в блоке «FONT TOOLS» нажимаем «BROWSE», выбираем шрифт «KVTOSD_FMap_v1_Small.mcm», нажимаем «Upload» и ждём пока шрифты загрузятся, в процессе будет мигать индикатор «TX» в блоке «PORT STATUS»; Теперь в блоке «OSD Controls» нажимаем «READ» (прочитать данные с платы), вносим необходимые настройки для отображения нужной Вам информации на мониторе, нажимаем «WRITE» (записать на плату). P.S. — небольшое отступление, я перепробовал не один десяток прошивок для MAVLink-OSD, но во всех шрифты никак не хотели прошиваться, то ли это особенность этой платы, то ли помогло то, что прошивая шрифты из прошивки «KV_Team_OSD_2.3» я подал питание от аккума (12V) на «аналоговую часть» платы, а «цифровая часть» платы соответственно питается от 5V!


Подключаем приёмник RC805 к монитору и при желании крепим это всё на аппу. Помните, что для корректного видео сигнала, каналы на приёмнике/передатчике должны быть идентичны!


Ссылки для скачивания:
Программа u-center
Прошивка KV_Team_OSD_2.3
P.S. — статья была подготовлена более 2-х лет назад и благополучно забыта в черновике, возможно уже и не актуальна, но всё же решил опубликовать, строго не судите…
Частоты
Передатчик, транслирующий сигнал, и приемник, этот сигнал принимающий, работают на определенной частоте. В авиамоделизме принято несколько наиболее распространенных частот, но чаще всего для видео используется частота 5.8 ГГц.
Есть и другие частоты – 900, 1200, 2400 ГГц. На частоте 2.4 ГГц как правило ведется управление квадрокоптером. Чем меньше частота, тем значительнее ее проникающая способность и тем лучше дальность полета дрона. Но и тем крупнее размер антенны.
Выбор 5.8 ГГц для передачи видео не случаен. Данная частота является легальной во многих странах (на использование некоторых частот может быть наложен запрет на законодательном уровне). Кроме того, можно использовать небольшую антенну, что важно для беспилотников любительского уровня. Видео, транслируемое на 5.8 ГГц, не влияет или практически не влияет на управляющую частоту 2.4 ГГц.





 купить по привлекательной цене 46990 руб. в Москве")