

Ноги или колеса – что предпочтительнее для механизма передвижения робота
В отличие от традиционных компьютеров, роботы могут перемещаться и взаимодействовать с окружающей средой. Эта мобильность вызывает также и проблемы. Каков наиболее эффективный и надежный способ передвижения робота? Для многих дебаты сводятся к выбору между колесными роботами и роботами на ногах. Технология мобильности, которую вы выбираете, принципиально формирует то, что вы можете попросить робота сделать.
Какая мобильность нужна роботу?
Дискуссия о мобильности роботов отражает фундаментальную инженерную задачу. В нашем современном мире роботам трудно обойтись без средств передвижени. Подумайте обо всех естественных и социальных правилах, которые регулируют нашу среду. В городской среде у робота есть дороги для навигации. Однако один и тот же робот может оказаться неэффективным при дальних поездках или ситуациях, требующих транспортировки груза.
Потребность в роботах с ногами: преодоление препятствий и восхождение на горы
Робот Atlas, созданный Boston Dynamics, является одним из самых известных ножноприводных роботов в мире. Он обладает отличными способностями для навигации по препятствиям. В ролике ниже показано его умение ловко обходиться с препятствиями. Он достигает такого уровня равновесия и координации, который находится за пределами для многих людей. Благодаря этому данный робот успешно перемещается по препятствиям. В то время как Atlas примерно сопоставим по размеру со взрослым человеком (рост около 1,5 м), это только один подход реализации роботов с ногами.
Естественный мир вдохновил исследователей робототехники в Японии. Основанный на способе передвижения муравьев, в Токио недавно был разработан робот с шестью ногами, способный преодолевать сложные поверхности. Если вам нужно отправить робота в опасную среду или в неравномерную естественную среду, например, горы, то такие роботы подойдут идеально для данных задач. Навигация по пересеченной местности является одной из причин, по которым, например, НАСА выбрало робота-скорпиона в 2000-х годах.
Если мы будем применять роботов в рамках опасных действий, таких как помощь пожарным, способность так передвигаться значительно поможет. Для роботов, предназначенных для обслуживания внутри зданий, ноги тоже имеют явные преимущества. Увы, есть один крупный компромисс, который нужно иметь в виду с ножноприводными роботами: чтобы достичь маневренности и преодолевать препятствия, придется отказаться от скорости. Если вам нужна скорость, вам нужно рассмотреть колесных роботов.
Потребность в колесных роботах: большая скорость и грузоподъемность
Хотя колесные роботы не могут преодолевать те же препятствия, что и роботы с ногами, они имеют другие неоспоримые преимущества. Наиболее распространенным примером колесного робота является автономный или самодвижущийся автомобиль с автопилотом. Возьмем автопилот машин Tesla в качестве примера. Для ориентации используется комбинация датчиков, радара и камер. Используя этот подход, автомобиль обладает большей способностью перемещаться в любых погодных условиях, чем автомобили, использующие только лазерные системы.
Помимо автопилотируемого транспорта, есть и другие примеры колесных роботов. Например, фермерские роботы были недавно протестированы на полях в Великобритании. В начале 2023 года Facebook подал патент на многоколесный робот, который был сравнен с R2-D2 из Звездных войн. Первоначальные слухи говорят о том, что данный робот может использоваться в качестве поставщика телеприсутствия, чтобы помочь руководителям «посещать» собрания с помощью робота. Тот факт, что этот робот использует три колеса, предполагает, что он будет очень стабильным, а случай использования связи указывает, что стабильность имеет значение для некоторых случаев использования робота.
Размывание границ: ноги плюс колеса
Для полноты картины скажем, что некоторые предприимчивые разработчики роботов создали роботы, которые включают обе эти функции. Продемонстрированный в 2023 году, Quattroped может использовать колеса или ноги. Этот подход «с двумя режимами» к робототехнике напоминает нам о том, что вам не нужно жестко следовать ни одному из вариантов в вашем проекте. Конечно, при таком гибридном подходе обеспечивается отличная гибкость применения, но при этом немного снижается максимальная скорость, обеспечиваемая колесами, а также максимальная маневренность, обеспечиваемая ногами.
Какие роботы лучше?
В краткосрочной перспективе, скорее всего, колесные роботы будут доминировать. В то время как Atlas впечатляет своей проходимостью, ограничения на нагрузку и внутреннюю мощность батареи являются существенными недостатками. Кроме того, объем инвестиций и интерес к автомобилям с автопилотом будет означать, что навигация для колесных роботов будет улучшаться.
В долгосрочной перспективе роботы с ногами, особенно с человеческим форм-фактором, представляют собой интересные возможности. Они могут использоваться в медицине, например, для ухода за больными. Также они могут участвовать в разборе завалов, спасении пострадавших и т.д.. Будем надеяться, что инженеры учтут законы робототехники Азимова, поскольку это будет очень важно в будущем.
© radiocopter.ru
Беспилотники большие и малые
Эквивалент Orca есть и у Китая. Новейшие подводные аппараты большого водоизмещения HSU-001 мир впервые увидел в 2023-м, на параде по случаю 70-й годовщины основания КНР. Продемонстрированные беспилотники-невидимки, крылатые ракеты, гиперзвуковое оружие особо никого не удивили, по большому счету они скопированы с аналогов армий других стран. Другое дело — подводные роботы. Они вызвали за рубежом неподдельный интерес.
Технические характеристики китайцы не раскрывают. О возможностях морских аппаратов наблюдатели могут лишь догадываться по внешнему виду. Подлодка имеет сдвоенные винты, оптимизированные для крейсерского движения. Вероятно, HSU-001 задумывался как аппарат для дальнего патрулирования. Двигатели спрятаны в корпус, что, скорее всего, позволяет двигаться вертикально вверх, вниз и даже вбок.
Подлодка может «видеть» не только то, что происходит кругом, но и то, что делается над водой. В пользу этого говорят наблюдательные системы, которые крепятся на двух мачтах и убираются в корпус, когда дрон погружается. Гидролокатор обнаружит противника на глубине, а небольшие выемки с обеих сторон могут быть частью системы самонаведения, которая заметит любой подводный объект, включая «материнскую» подводную лодку.
Но даже не демонстрация новейшего подводного беспилотника поразила наблюдателей, а тот факт, что подобных подводных роботов Китай начал тестировать еще десять лет назад. Вряд ли кто-то всерьез мог подумать, что уже в 2023 году КНР обладала оружием для охоты на вражеские подводные лодки.
Однако существуют беспилотники, гораздо внушительнее китайских HSU-001, на их борту можно разместить тяжелое вооружение и даже боезаряды с ядерной начинкой. О подобной в марте 2023 года заявил президент России Владимир Путин, говоря, что в нашей стране создан подводный беспилотник для очень больших глубин и межконтинентальных расстояний, который может передвигаться со скоростью, «кратно превышающую скорость подводных лодок, торпед и всех видов даже самых скоростных надводных кораблей».
Это российский «Посейдон», способный нести ядерное оружие мощностью до 2 мегатонн. Этого достаточно, чтобы уничтожить не только цель на берегу, такую, например, как укрепленные военные базы потенциального противника, но и вызвать гигантское цунами. Оно может быть даже страшнее взрыва, поскольку смоет прибрежные города 20-метровыми волнами.
«Способов противодействия «Посейдону», наверное, не существует. Аппарат обладает неограниченной дальностью и огромной скоростью. Перехват его торпедой практически невозможен, а вблизи берегов он теряет всякий смысл, так как взрыв может вызвать цунами, — говорит военный эксперт Юрий Кнутов.
Скорость «Посейдона» около 200 км/ч, рабочая глубина — 1 км, длина — 20 м, вес — 100 т. Беспилотники с такими габаритами могут перевозить только специальные корабли. Как ожидается, на вооружение «Посейдон» поступит в 2027 году.
Из десятков, сотен и даже тысяч других, более мелких, можно сформировать так называемый рой, против которого устоять очень сложно. Подобная тактика переворачивает прежние представления о морском бое, и та страна, которая сможет ее реализовать первой, станет безоговорочным морским лидером. Планируется, что управлять роем будет искусственный интеллект.
Каждая единица роя весит чуть менее 2 кг, дроны могут погружаться на глубину до 50 метров и оснащены датчиками температуры и давления, а также GPS для точности определения местоположения.
«К примеру, командным пунктом ставится общая задача — уничтожить авианосную ударную группу противника. Искусственный интеллект, который будет управлять роем подводных беспилотников, решает эту задачу уже сообразно с вполне конкретными и непрерывно меняющимися обстоятельствами.
То требуется сосредоточить усилия на одном из направлений. То совершить маневр и перенести усилия на другое направление. То на время выйти из боя и ввести противника в заблуждение демонстративными действиями. Все это будет делать ИИ, получающий данные по обстановке из самых разнообразных источников», — поясняет источник «Газеты.ру» в российском оборонно-промышленном комплексе.
Выбор аппаратуры – страница 2
Страница 2 из 3
Цены на RC передатчики
Аппаратура выбирается на года, поэтому экономить 100$ при выборе не стоит.
Нижний ценовой диапазон, на который стоит обратить внимание начинается с 200$ и открывает его Spectrum DX6i.
Брать более дешевую аппаратуру имеет смысл тольков том случае, если вы не до конца уверенны, что авиамоделизм захватит вас надолго.
Тогда, если вам понравиться летать, то старая аппаратура пойдет для полетов на симуляторе, а если нет, то ее можно будет продать другому начинающему или оставить себе: для редких вылетов, развлечения в симуляторе радиоуправляемых авиамоделей.
Количество каналов
Но даже в этом случае, брать что то меньшее чем hobbyking на 6 каналов не имеет смысла.
Все то, что стоит дешевле, на текущий момент, не имеет таких нужных вещей как настройка передатчика под авиамодель. Нет настройки крайних положений сервомашинок, возможности использования флапперонов, настройки экспонент и микшеров.
В hobbyking на 6 каналов все настройки задается через компьютер, это позволило удешевить аппаратуру, но сделало неудобным подстройку в полевых условиях. Придется возить с собой в поле ноутбук.
Количество каналов производители напрямую связывают с ценой радиоаппаратуры для авиамоделей. Хотя, для современной электроники не важно, сколько каналов программировать на микропроцессоре, а переключатель дополнительного канала стоит копейки для массового производства, но тем не менее разница в цене между передатчиками на 7 и на 9 каналов может различаться в 2 раза.
Брать комплект аппаратуры который имеет меньше 6-ти каналов не стоит, так как на таком комплекте не возможно подключить элероны в разные каналы и соответственно, настроить микшер флаперонов.
Вообще, чем больше каналов имеет аппаратура, тем большие возможности по настройке микшеров она имеет.
Меньше 4-х каналов даже не стоит и рассматривать!
4-х канальная аппа имеет настройку только V-mix (для полетов на летающем крыле) и 2-х расходы, иногда эти микшеры не выведены, но используя паяльник и пару проводов с переключателем (для двойных расходов) или просто нож, для того, что бы проковырять отверстие (дл V-mix) можно негко включить их. Как именно — смотрите статью по WingDragon и аппаратуре от ArtTech.
5ти канальная аппаратура встречается редко и ее отличие от 4-х канальной только в том, что пятый канал управляется отдельно. На него можно вешать выпуск шасси включение закрылков или включение дополнительного оборудования, например фото или видео аппаратуры.
6ти канальная аппа обычно дополнительно поддеживает микшер флаперонов — когда оба элерона можно отклонить вниз или вверх, это позволяет снизить посадочную скорость.
Кроме этого, 6ти (и выше) канальные передатчики обычно поддерживают сохранение настроек для каждой авиамодели. Количество сохраняемых авиамоделей обычно равно количеству каналов передатчика.
Spectrum DX6i, кроме этого, позволяет включить микшер элероны руль направления — при повороте рулем направления авиамодель заваливается на крыло и этот микшер позволяет настроить повороты рулем направления ровно в одной плоскости.
Какие еще существуют микшеры — смотрите в инструкции по Spectrum DX6i на русском языке.
7 каналов может все вышеперечисленное заваязки микшеров на новый канал. Аппаратура от 7ми каналов становиться нужна, если вы профессионально начинаете летать на копиях, планерах с полной механизацией крыла и вертолетах.
Turnigy 9x, не так давно появился целый класс аппаратур на одинаковой базе, смотрите про них отдельную статью Turnigy 9x. Если кратко – данная аппаратура хороший выбор для новчика. При цене чуть выше чем hobbyking на 6 каналов, она имеет ряд преимуществ – первое это цифровые триммера, второе куча микшеров и сабтриммеров, третье – у нее есть дисплей и для настройки в поле дополнительных значений или переключений с одной авиамодели на другую не потребуется ноут.
Turnigy 9x – по качеству сопоставима со спектрумом, а по цене более чем пару раз дешевле!
Сам я использую Hitec Eclipse 7 QPCM и приемники Corona на 4 и 8 каналов. Приемников у меня на текущий момент 9 штук 🙂 По числу авиамоделей. Еще прикупил короновский модель на 2.4 с парой приемников. Пока не особо использую.
Кстати, о приемниках. Аппаратура на 2.4 работает только с приемниками той фирмы аппаратура или передающий модуль которой используется. Невозможно купить аппу Futaba или Spectrum и заставить ее работать с дешевыми приемниками hobbyking.
Мегагерцовая аппаратура позволяет использовать дешевые приемники.
Обсудить статью можно в авиамодельном форуме
Датчики и навигация
У робота пылесоса на борту может присутствовать несколько датчиков, отвечающих за его навигацию и передвижение в замкнутом пространстве.
Самые дешевые модели оснащены только механическими. При ударе о твердый предмет (стена, ножка стола) срабатывает механический датчик, и робот тут же меняет свое направление движения.
Такие пылесосы передвигаются по комнате хаотически. На очистку одного и того же участка у них уходит гораздо больше времени.
Они подойдут максимум для двух комнат или холостяцких берлог. При этом их как несмышлёных детей придется вручную переносить из комнаты в комнату и запирать там двери.
“Робот-дурачок” может заехать в один угол десять раз, а в другой – ни разу. И только благодаря ежедневному использованию семь раз в неделю это броуновское движение позволяет добиваться хоть каких-то приемлемых результатов.
Еще смотрите, чтобы они имели функцию мягкого касания (плавное торможение перед преградой).
Более современные девайсы имеют гироскоп. По нему робот фиксирует свои координаты передвижения.
Причем визуально гироскоп не обнаружить, так как он запрятан внутри корпуса.
Если ваш робот способен передвигаться змейкой – это и говорит о наличии гироскопа. Данные пылесосы эффективно убирают помещения в пределах от 3-х до 5-ти комнат (60-80м2).
Есть также умные “блины”, у которых машина после первого пробега сама строит виртуальную карту дома.
При покупке проверяйте сколько карт может хранить в памяти пылесос.
Роботу при каждом новом запуске придется заново перестраивать карту. В итоге на уборку будет уходить больше времени, плюс собьются все запретные зоны.
А очень многие, карты именно для этого и используют. По ним вы сможете запретить пылесосу заезжать в те или иные области (миска с едой домашнего животного) или отдельные комнаты.
Например, детская, где он может запросто “нажраться” запчастями от конструктора Lego.
За постройку карт отвечает лазерный датчик дистанции или лидар.
LIDAR – это такая башенка-сканер на корпусе, которая позволяет машине определять расстояние до всех окружающих предметов и свободно ориентироваться на площади свыше 100м2.
Согласно отчетам сервисных центров, Lidar – это самое слабое звено у большинства робот-пылесосов. В первую очередь выходит из строя именно он (особенно у Xiaomi).
При этом данная запчасть чуть ли не самая дорогая во всей конструкции. 
Почему-то мало кто в обзорах говорит, но лидар при вращении способен затягивать в себя пыль. И его периодически приходится разбирать и чистить.
А это уже работа не для простых домохозяек. Его цена уже гораздо меньше.
Его цена уже гораздо меньше. Его цена уже гораздо меньше.
Его цена уже гораздо меньше.
Поэтому не дайте себя обмануть всяким ремонтных сервисам, пытающимся втюхать вам замену всей детали целиком.
Кроме того, пылесос из-за этой башенки может застревать под мебелью. Заранее проверяйте габариты и при необходимости рисуйте там запретные зоны. Такие зоны также можно выставить с помощью дополнительных аксессуаров – магнитных лент или устройств, строящих виртуальную стену.
Такие зоны также можно выставить с помощью дополнительных аксессуаров – магнитных лент или устройств, строящих виртуальную стену. Такие зоны также можно выставить с помощью дополнительных аксессуаров – магнитных лент или устройств, строящих виртуальную стену.
Такие зоны также можно выставить с помощью дополнительных аксессуаров – магнитных лент или устройств, строящих виртуальную стену.
Кроме механических датчиков на борту более умной машинки могут присутствовать:
Они помогают находить и объезжать препятствия и преграды. Робот не будет постоянно тыкаться в незнакомые предметы. Определяют расстояния до объекта и что самое главное, вычисляют высоту. Благодаря им ваш мини-уборщик не свалится вниз, дойдя до края ступеньки.
Определяют расстояния до объекта и что самое главное, вычисляют высоту. Благодаря им ваш мини-уборщик не свалится вниз, дойдя до края ступеньки. Определяют расстояния до объекта и что самое главное, вычисляют высоту. Благодаря им ваш мини-уборщик не свалится вниз, дойдя до края ступеньки.
Определяют расстояния до объекта и что самое главное, вычисляют высоту. Благодаря им ваш мини-уборщик не свалится вниз, дойдя до края ступеньки.
По ним робот находит дверные проемы и самостоятельно переезжает из одной комнаты в другую.
Самой современной навигацией на данный момент считается лидар встроенная видеокамера. Поэтому большинство производителей умных пылесосов запрещают своим девайсам транслировать потоковый видеосигнал или сохранять его в облаке.
Поэтому большинство производителей умных пылесосов запрещают своим девайсам транслировать потоковый видеосигнал или сохранять его в облаке. Поэтому большинство производителей умных пылесосов запрещают своим девайсам транслировать потоковый видеосигнал или сохранять его в облаке.
Поэтому большинство производителей умных пылесосов запрещают своим девайсам транслировать потоковый видеосигнал или сохранять его в облаке.А вот отправлять картинки они умеют.

С такими датчиками ваш маленький помощник никогда не запутается в проводах и не засосет потерявшийся носок.
Дневники разработчиков: собираем профессионального подводного робота

15 мая на Робостанции прошел этап отбора к всемирной олимпиаде по робототехникие для школьников. Кроме того в мире существует еще ряд подобных соревнований для различных роботов. Об одном из них и пойдет речь.
MATE ROV пожалуй одно из сложнейших мировых соревнований по робототехнике – оно спонсируется NASA и посвящено подводным роботам, создавать которые невероятно трудно. Например сейчас в кинотеатрах выходить фильм «Жизнь Робота» — он посвящен истории победителей этого чемпионата 2004 года.
Подготовка к такому чемпионату и создание своего робота для него занимает месяцы и порой бывает интереснее самого чемпионата, но часто остается за кадром. Мы решили приоткрыть завесу над этой области робототехники и теперь будем регулярно вести дневники разработчиков одной команды, твердо решившей взять золото на следующем чемпионате.
Их робот будет презентован на робостанции, а команда конструкторов проведет мастер-класс по подводным роботам в Робошколе. А пока можно подсмотреть за процессом его рождения в лаборатории.
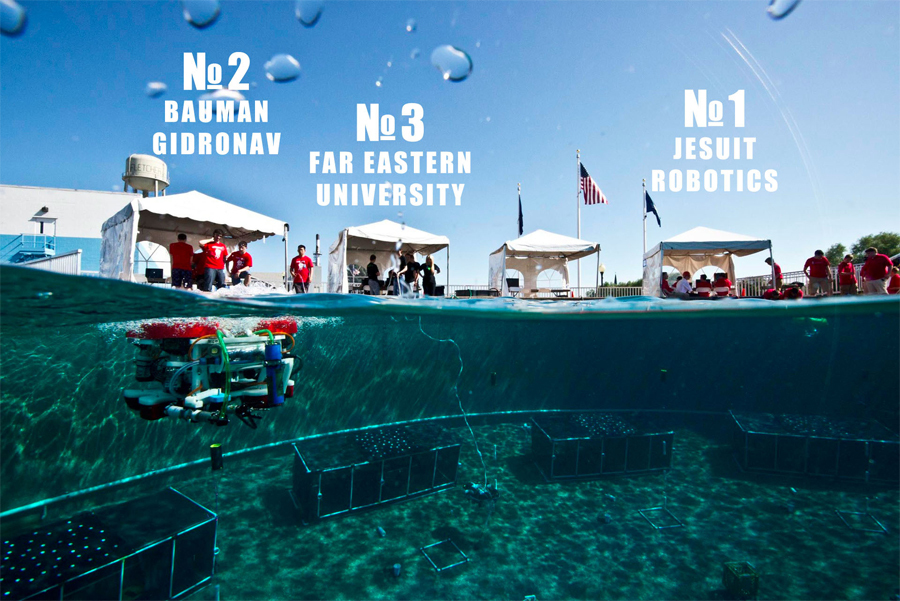
Наша команда носит гордое имя Bauman Gidronav. В прошлом году мы отлично съездили на чемпионат MATE ROV, (позже запостим отчет). В этом году у нас случилась заминка и организаторы решили не идти нам на встречу перенеся наше участие на июнь 2023 года. Тем самым подписав себе смертный приговор, потому что если мы за пару месяцев взяли второе место то за год мы допилим робота уровня военного уровня. Вот наш красавец:

Обратите внимание на необычные винты.
Вот ради него мы и решили завести на Хабре еженедельные дневники разработчиков – что бы под взором общественности не было соблазна все забросить и делать спустя рукава. Плюс мы планируем привезти своего робота на робостанцию и прочитать о нем лекцию всем желающим. Надеемся наш опыт и советы помогут фанатам DIY по всей стране. Сегодня поговорим о винтах и электронике.
Итак, начнем с теории. Все видели как прячут винты подводных лодок. Что же они скрывают?

Винт АПЛ Ясень еще секретен.
Вообще все винты подлодок секретны, поскольку по одной-двум фоткам можно реконструировать звуковой след подлодки и легко найти её в океане шумов. Все фотографии винтов подлодок в интернете это чье-то грубое нарушение режима секретности. Может их и в интернете публиковать нельзя, но мы рискнем.
Винт – главный узел в морской инженерии. Его изучение и проектирование это столь трудоемкая задача, что у нас есть отдельный «НИИ Гребных винтов» — ЦИИ Крылова. Но при этом все наши знания о винтах чисто эмпирические. Не существует никакой математической теории описывающей идеальный винт – есть только формулы аэродинамики и старый добрый эксперимент.
Фактически здесь морской инженер действует как артиллерист с баллистическими таблицами – просто выбирая подходящую модель уже готового винта. Главное в винтах это эффективность и уровень шума. Гражданским важна тяга, военным – тишина, и всем – маневренность. По этому у современных подлодок такие тонкие изогнутые винты – это математически рассчитанная форма для снижения эффектов т.н. кавитации.

Винт ПЛ «Санкт-Петербург» проекта 677 «LADA»
Но можно пойти и по другому пути – если винту добавить кожух то выйдет своего рода турбина и можно будет на выбор увеличить тягу или сильно снизить уровень шума.

АПЛ класса Лос-Анджелес с ободом винта.
Но если вам действительно нужен турбированный винт, вы обратите внимание на детище советского инженерного гения.

ПЛ «Алроса» с экспериментальным водометным движителем. Из-за рекордной тишины хода в НАТО подлодка получила имя «Черная дыра».

Внутри водомет — по сути та же турбина.
То же справедливо и для гидронавтики в целом – на до звуковых скоростях у нас одни формулы с обычной аэронавтикой. Обе науки берут начало в старой «баллистике» — так называлась наука из которой произошла физика, химия да и получается, что и гидронавтика тоже. И эта наука любит отбрасывать все лишнее, по этому на свет родился третий тип винта.

В 2023 году немцы представили Rim-driven thruster — совершенно новое поколение вентильных/бесколлекторных двигателей лишенное всех недостатков привычным нам осевых девайсов. Идея их не нова для теоретиков, но вот практическая реализация всегда упиралась в отсутствие достаточно мощной электроники.
Преимущество таких устройств очевидно:
- Двигатель и винт представляют одно устройство, что экономит место и упрощает конструкцию. В нем нечему ломаться.
- Одинаковая тяга в обоих направлениях.
- Сверхманёвренность.
- Полная тишина.
- И главное — его невозможно заклинить. Водоросли в винтах — основная проблема подводных роботов — теперь в прошлом.
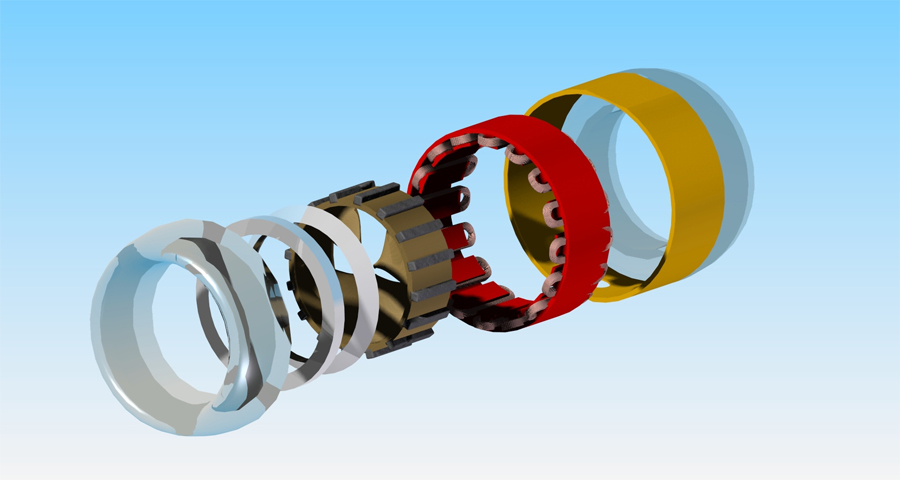
А вот недостатки не столь очевидны:
- Сложная конструкция. Реально сложно собрать ее в гараже.
- Требует особо надежных высоковольтных транзисторов.
- Пока только для малых глубин, для реальных подлодок не достать надежных транзисторов.
- Сопротивление обода потоку воды снижает мощность в полтора раза.
Не сложно видеть, что такие винты идеально подходят для подводных роботов, особенно если у вас есть доступ к приличной электронике. Но мы решили не рисковать со сложной конструкцией и к винтам просто подвели трос от обычного внешнего двигателя. Пойти на это пришлось как раз после прошлого чемпионата. Слишком тугая компоновка робота понизила маневренность — струи двигателя перекрывались и втыкались в корпус. От этого страдала и скорость и точность и управляемость.
Двигатели конструктивно разделены с винтами, что позволило радикально упростить конструкцию.
Собственно новый аппарат имеет две передние камеры, четыре горизонтальных винтомоторов, четыре вертикальных. На фото макет как он был показан в Сколково, однако с тех пор многое поменялось. После той выставки мы уже приступили к нормальной сборке аппарата. Первым делом конечно испытывали герметичность отдельных частей аппарата. Так, например, проходило испытание герметичности прочного корпуса электроники.
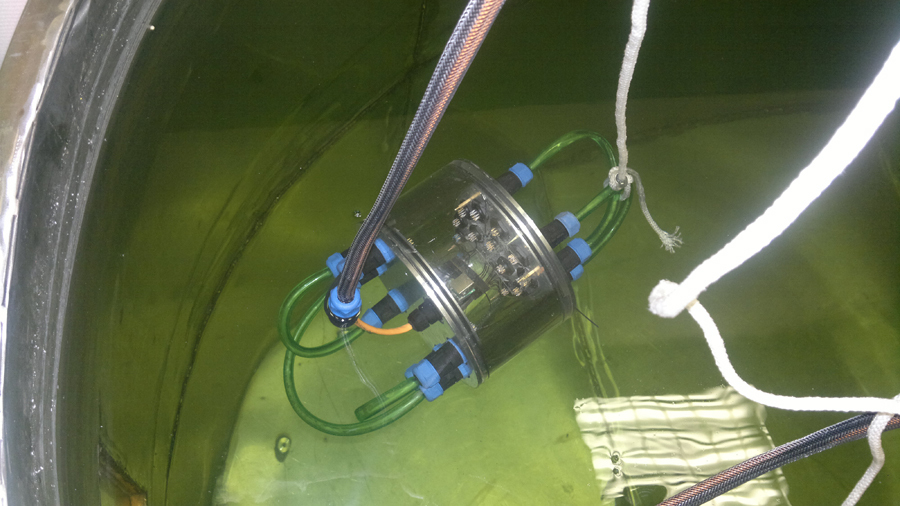
Формально это и есть корпус нашего робота.
В этот раз мы решили все сделать как надо и перешли на технологии, которые нам нравятся. Первым делом поставили нормальные цифровые стереоскопические камеры. В прошлый раз камеры были аналоговые и передавали сигнал по одной дифференциальной паре в непонятном китайском формате через два китайских нонеймовских преобразователя PAL в дифференциальную форму. Короче костыли, от которых очень хотелось отказаться.
А раз камеры, значит к ним компьютер и к нему нормальный канал гигабитный. А если уж электронику делать как надо, то и в остальном не срезать углы, а сразу делать как надо. Отсюда просторная конструкция и винты с внешним зацеплением лопастей. Кстати в русском языке нет еще названия этим винтам и вроде мы первые, кто использует их на гражданских проектах. Мы называем их хаблос, потому что гугл называет такие винты hables propeller, но в лаборатории за ним уже крепко утвердилось прозвище «дырявый» винт.
Электроники стало меньше и корпус робота удалось сделать меньше. Новые моторы — меньше и мощнее. Кстати с моторами не обошлось и без читов.

Наши полтора киловатта.
Питание для всех моторов — пришлось взять военные ИП ибо все остальные не выдерживают и горят. Но Ирибис сжечь невозможно, это ИМХО самые надежные блоки в мире, ну из тех что можно купить легально. Если решите собирать робота — берите только их.

А вот так выглядит блок электроники в сборе, ну почти в сборе.
Главное новшество — появление центрального компьютера. Полноценная ось и проц тянут все, да и атом последнего поколения приятно удивил — работает быстрее моего ноутбука. Способен компилироваться, отваживаться прямо на себе и одновременно захватывать пять камер, обрабатывать их и передавать на берег. И все это время еще и полноценно управлять роботом.
На нем в разы легче писать программы особенно в области искусственного интеллекта. Многоядерность опять же подспорье. Компьютер берет на себя такие программы как выход в точку работы, возврат на корабль, следование за кораблем или следование за целью. Эти программы тоже очень важны, т.к. в реальной жизни робот в море опускается на рабочую глубину часа два — было бы обидно платить за это время пилотам.
Но главная фича от появления компьютера — возможность перепрошивать главный контроллер в горячем режиме. Это очень важно, поскольку основные программы системы управления роботом обитают именно в нем, то есть все те, что требуют очень жесткого реального времени. Софт занимается осуществляет связь с берегом и работой с камерами, в основном через модуль измерения методом оптического дальномера — поскольку это единственный способ померять что-то под водой. Лазеры не эффективны, а рулетку на дне не достанешь. Все меряется через стереоскопическое зрение.

Логически блок поделен на две части: блок обработки видео и блок управления аппаратом. Блок обработки видео — это одноплатный компьютер на базе четырёх ядерного Intel Atom, который занимается захватом видео с камер и передачей его через Ethernet на берег. Блок управления аппаратом – это микроконтроллер stm32 в операционной системой FreeRTOS, который производит уже управление всем аппаратом, отвечает за системы стабилизации.
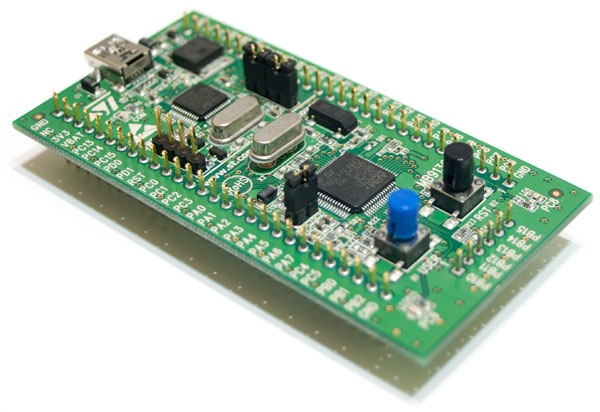
STM32 — сердце нашего робота.
Данные с берега он получает от одноплатный компьютер через USART. Связь с берегом – гигабитный Ethernet, однако в действительности максимум получается всего лишь порядка 750Мбит/с, но этого хватает. Помимо фронтальных камер аппарат имеет ещё 3 осмотровых: слева, справа и сзади. Также блок электроники может осуществлять управление до шести различными устройствами посредством ШИМа. Это свет, управление наклоном фронтовых камер, два схвата и два дополнительных приспособлений. Стоит отметить, что вся бортовая электроника гальванически полностью развязана с береговой частью.
Однако всё оказалось не так просто. Например, наш одноплатный компьютер, сделанный на Тайване не всегда успешно инициализирует контроллер физики Ethernet, от чего пришлось заменить его на спаренный USB 3.0 хаб с Gigabit Ethernet преобразователем. Спасло конечно то, что у USB 3.0 очень хорошая скорость передачи данных, что позволяет захватывать видео одновременно с двух высококачественных камер и передавать его на берег. Не хочу сказать ничего плохого про Тайваньских производителей, но они были сами удивлены данной неисправностью, когда узнали об этом.
А вот так выглядит процесс сборки. На фото четыре модуля драйверов, соединяющихся по RS485 между собой и с главным контроллером.
Также был переделан пульт управления аппаратом. Поставлен дополнительный сенсорный монитор с большей диагональю и компьютер по мощнее для обработки видео, поступающего с аппарата.

После довольно интересного и длительного процесса сборки, сопровождавшегося множеством багов, мы наконец кое как поплыли.

На данном этапе мы всё ещё имеем довольно длительный перечень работ. Например, надо всё-таки доделать планируемые винтомоторы, отладить систему стабилизации, подключить обе фронтальные камеры, так как сейчас используется только одна.
На этом пока всё, стей тюнед. Манипуляторы и система управления — в следующем посте.
PS
Если вы увлекаетесь или просто интересуетесь DIY инженерией — обязательно приходите в Робошколу, это сейчас единственное место в Москве где столько энтузиастов собирают своих роботов и делятся опытом под присмотром инженеров-робототехников.


