
 | Авиамодельный Клуб \"АС\" — производство БПЛА")
- №5 проверьте моторы
- №6 проверьте приемник
- Балансировка
- Выбор винта (пропеллера) | авиамодельный клуб “ас” — производство бпла
- Диаметр и шаг
- Какую конструкцию выбрать? [править]
- Калькулятор ecalc
- Коаксиальные конструкции [править]
- Количество и форма лопастей
- Контроллер
- Конфигурация baseflight/harakiri
- Конфигурация osd
- Методы установки
- Направление вращения
- Балансировка
- Научные интересы магистранта адамовского в.в.
- По форме лопасти бывают:
- Поставленная задача
- Правила установки винта на дрон
- Сборка
- Статьи в тему:
- Техника
- Установка винтов квадрокоптера. дрон — как правильно установить лопасти винты. сборка квадрокоптера
№5 проверьте моторы
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Если мотор крутится не в ту сторону, можно исправить 3 способами:
- поменять местами провода
- переназначить порт (resource remapping)
- или сделать реверс в BLheli — это самый простой и удобный способ.
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
№6 проверьте приемник
Подключитесь к бетафлайт и перейдите во вкладку «receiver». Подключите аккумулятор, включите пульт. Проверьте, все ли команды реагируют. Когда вы двигаете стиками и переключателями, цветные полоски тоже должны двигаться.
Если ничего не происходит, убедитесь, включен ли приемник и пульт, правильно ли подключен приемник. Также убедитесь, что во вкладке Конфигурация выбран правильный тип приемника (IBus, SBus и т.д.), а также правильный ли выбран протокол работы (мультишот, дшот и т.д.).
Если полоски двигаются, но не в том порядке, попробуйте поменять карту разметки с AETR1234 на TEAR1234 во вкладке «receiver».
Далее убедитесь, что среднее положение полосок на отметке 1500, а минимальные и максимальные 1000 и 2000 соответственно. Поправить значения можно кнопками на пульте:
или внеся корректировки через CLI, подробнее здесь (в статье это заголовок Receiver).
Неправильные средние значения приведут к тому, что ваш дрон начнет дрейфовать и лететь в разные стороны (смотря какой канал не в середине).
Проверьте, какое число показывает стик газа, когда он в нижнем положении. Число не должно быть выше 1040, в противном случае дрон не получится заармить (запустить двигатели).
Балансировка
Качество винтов для мультикоптера определяется точностью их изготовления. С высококлассными пропеллерами не требуется дополнительная балансировка, а вибрации в работе винтомоторной группы практически отсутствуют.
Большинство бюджетных запчастей трудно назвать сбалансированными на 100%. Их отличает высокий шум работы мотора, вибрации и нестабильность полета.
Если коптер предназначен для видеосъемки – обязательно присутствие «эффекта желе» на картинке, качество съемки низкое, а изнашиваемость беспилотника (двигатели, подшипники, шестерни) – высокая, что в конечном итоге сказывается на дороговизне техобслуживания аппарата.
Для точной балансировки понадобится специальное приспособление – балансир и немного терпения.
Принцип работы прибора простой. Ось, на которую надевается пропеллер,установлена строго горизонтально и вращается с минимальным трением. Сбалансированный винт должен «замирать» в любом положении. В противном случае, более тяжелая сторона опускается вниз и ее тонкий торец нужно «корректировать» наждачной бумагой (стирать, избегая появления заусениц).
Не отбалансированные винты – причина вибрации аппарата, что негативно влияет на стабильность полета.
Выбор винта (пропеллера) | авиамодельный клуб “ас” — производство бпла

При расчёте винто-моторной группы учитывается много параметров. Например такие, как размер самолёта, его тип и назначение. Поэтому от выбора винта во многом зависит дальнейший выбор мотоустановки, контроллера (регулятора оборотов двигателя) и характеристик аккумулятора. Именно так: «Пляшем от печки, то есть от винта.» Основные параметры, которые мы учитываем при выборе воздушного винта — это диаметр и шаг.
Так как основную массу авиамодельной техники по типу мотоустановки и лётным характеристикам можно с определёнными оговорками отнести к пилотажным моделям, остановимся подробнее на подборе винтов именно для них. Специфика подбора винтов для бойцовок, гоночных моделей, мотопланеров несколько отличается. Конечно, самое правильное, начинать подбор винта, опираясь на рекомендации производителя набора (KIT/ARF), но когда мы строим модель «с нуля» таких рекомендаций может и не быть. В таком случае можно воспользоваться следующей методикой: для авиамоделей с размахом крыла от 1,5 метров подбираем винт, равный примерно 25% размаха крыла, а для меньших моделей этот параметр необходимо немного увеличить.

| очется ещё раз подчеркнуть, что данная методика подходит лишь для «чернового», первичного подбора винта.Таблица соотношения размаха крыла к диаметру винта выглядит примерно так: |
| Следует учитывать тот факт, что так называемые «Фан флай» (Fun Fly) и модели для 3D-пилотажа используют винты больших размеров, а скоростные авиамодели и модели-тренеры — меньших, чем приведенные в таблице.Теперь давайте попробуем разобраться за что отвечают эти две основные характеристики — диаметр и шаг воздушного винта. Как видим измеряются они в дюймах, если ваш пытливый ум желает перевести дюймы в миллиметры, то просто умножьте дюймовый размер, приведенной для конкретного винта на 2,54 и получите диаметр интересующего вас пропеллера в миллиметрах.Диаметр винта в основном определяет статическую тягу мотоустановки (поднимет ли модель вверх утюг, привязанный к хвосту или нет? :-))), а также площадь обдува рулевых поверхностей (в основном элеронов). Как пример, поведение самолёта на вертикалях во многом зависит от статической тяги винта, так как подъёмная сила крыла в данном случае не работает. В свою очередь, от шага винта в большей степени зависит скорость воздушного потока, отбрасываемых винтом. То есть от шага винта зависит то, с какой скоростью сможет двигаться модель и скорость потока воздуха, которым будут обдуваться рулевые поверхности. В конечном счёте от этого параметра зависит скорость реакции самолёта на рули, особенно рули высоты И рули направления. Оценивая эти два параметра воздушных винтов — резюмируем: Третьим важным параметром винта является его тип. Рассмотрим некоторые из них, наиболее интересные для начинающих авиамоделистов: Тип «Е» (электро) — классические пилотажные винты для электромоторов. Самый распространённый тип. Рассчитан на вращение со скоростью 8000-10000 оборотов в минуту. Тип «SF» (слоу флайер) — винты с увеличенной тяговой характеристикой. Менее прочные чем серия «Е» и более лёгкие. Эффективно работают на малых оборотах 6000-7000 об./мин. Тип «Р» (пушер) — толкающий, то есть винт отбрасывающий поток в обратную сторону. Для электрических двигателей не слишком актуальный, ибо электрический двигатель не сложно заставить вращаться в любую сторону. Тип «F» (фолдинг) — складной винт. В основном используется на планерах для улучшения планирующих свойств при выключенном моторе. |

Ещё одна характеристика о которой очень много говорят, но вряд ли она серьёзно влияет на качество выполнения винтом своего непосредственного предназначения — это материал из которого он сделан. Основными материаллами для изготовления винтов являются дерево, пластик и карбон.
Как пример давайте рассмотрим типовой воздушный винт.

Винт имеет маркировку APS E 12*6, где APS — фирма производитель пропеллера, Е — тип винта, подходит для использования на авиамоделях, оснащенных электродвигателем, 12 — размер винта в дюймах, 6 — шаг винта в дюймах. Исходя из полученных нами знаний предположим, что данный экземпляр будет хорошо работать на авиамоделях с размахом крыла около 1200 мм., использующих электромотор.
Диаметр и шаг
Длина винта определяет величину диаметра диска, который образуется при его вращении. Чем больше этот «диск», тем выше подъемная сила дрона. Но большой диаметр требует мощного электромотора, в противном случае неизбежны перегревы.
Шаг (prop pitch) зависит от угла наклона лопастей винта и фактически означает расстояние, пройденное винтом по прямой оси за один оборот. В случае с дроном, величина шага показывает, сколько воздуха пропеллер поднимет за один проворот, то есть характеризует подъемную силу беспилотника.
Таким образом, с уменьшением диаметра и увеличением шага можно снизить сопротивление воздуха и поднять скорость подъема дрона, то есть повлиять на маневренность аппарата (что важно, например, для гоночных квадрокоптеров).
Выбирая пропеллер, изучите инструкцию к двигателю, на который он будет устанавливаться. Там, как правило, прописаны размеры винтов, допустимые для установки. Наиболее часто используются размеры 10 х 4,5 (10 х 4,7) и 12 х 4,5 (12 х 4,7) . Первая цифра – это диаметр винта (в дюймах), а вторая – шаг винта.
Какую конструкцию выбрать? [править]
Исходя из цели аэрофотовидеосъемки, в настоящее время, на мой взгляд, имеются следующие градации камер, которые могли бы поднимать в воздух мультикоптеры:
Считаем, что соответственно весу этих камер потребуется еще и стабилизированный подвес для них, что означает добавку в весе еще не меньше 50-70% от веса этих камер.
Например, средние камеры вполне может поднимать в воздух гексакоптер, построенный на двигателях AXi 2814/20 (22), пропеллерах 13х6.5 и немецких контроллерах 2.0. Его преимущества – относительная компактность, удобство эксплуатации – он может летать вполне достаточное время (около 8-9 минут) на одной батарее 5800 мА/ч, которая удобно и быстро меняется с полезной нагрузкой 2 кг.
Стоит на этих же двигателях построить октокоптер (я строил такой), картина меняется: аппарат становится довольно громоздким, чтобы летать те же 8-9 минут с полезной нагрузкой допустим 2,5-3 кг., ему нужны две батареи (5800), которые нужно заряжать специальным зарядным устройством, эти батареи нужно носить с собой, они не очень удобно и быстро меняются и т.п.
Немецкий кит Okto XL вполне способен носить Canon 5D, но сама по себе его конструкция мне кажется слабоватой, следовательно, генерирующей колебания, да и с батареями там проблема – можно использовать только плоские, крепеж подвеса там хилый и т.п.
Октокоптер есть смысл строить только для тяжелых камер, но на более мощных двигателях (AXi 2826/12 или AXi 4120/20) и мощных контроллерах (например, Аэродрайв8 или Геркулес, которые для I2C довольно дороги – 700-1400 евро за 8 штук), смиряясь с неудобствами и потерей мобильности, понимая, что это плата за съемку с высоты на камеру высокого класса.
Источник
Калькулятор ecalc
Многим создателям беспилотных моделей известен on-line калькулятор eCalc, предназначенный для расчёта параметров винтомоторной установки летательных аппаратов. Страница калькулятора, посвященная мультикоптерам, выглядит приблизительно так.
На первый взгляд, все понятно, но есть несколько нюансов, которые могут повлиять на результаты вычислений.
Прежде всего, вводится полный взлетный вес мультикоптера (с подвесом и камерой, если таковые имеются). Если будет указано Without Drive (Без привода), то вводим суммарный вес рамы, пропеллеров, платы контроллера, подвеса, камеры и оборудования для FPV полетов. Добавим процентов 10 на массу проводов и получаем искомую цифру.
Вводим количество роторов, их схему (одиночная или соосная), максимальную высоту полета и погодные условия, при которых он будет проводиться (температуру за бортом и атмосферное давление).
Из выпадающего списка выбирается нужный аккумулятор . Если необходимая батарея отсутствует, можно выбрать ближайшую по емкости и токоотдаче. Программа заполнит остальные поля самостоятельно. Задается структура и вес аккумулятора. Если предполагается параллельная установка нескольких АКБ, то в поле P вписывается их количество, а в окне Weight задается их общий вес.
Далее из выпадающего списка выбираются тип ESC или максимальный ток этих регуляторов.
Выбирается фирма-производитель двигателей. Появляется окно с его оценкой. По уровню KV подбирается конкретный образец.
Переходим к пропеллерам. Выбирается тип пропеллера, его диаметр и шаг. Рекомендуется использовать диаметр воздушного винта, максимально возможный для данной рамы. Если привод имеет зубчатую трансмиссию, то вводится ее передаточное число (отношение числа зубьев ведомой шестерни к числу зубьев ведущей шестерни).
Если нужные компоненты в выпадающих списках отсутствуют, можно перейти в строку Custom и ввести все необходимые данные в соответствующих полях калькулятора. Отметим, что параметры батареи задаются для одной ячейки.
Все поля заполнены, можно выполнять вычисления. Результат расчетов будет представлен в виде циферблатов, списков и графиков.
RashVinta– программа расчета диаметра воздушного винта для квадрокоптера.
Программа RashVinta позволяет производить вычисления по следующим исходным данным:
- Мощность двигателя и диаметр винта;
- Мощность двигателя и частота вращения винта;
- Диаметр винта и его шаг.
В первом варианте отметка ставится только в поле «Расчет по диаметру винта». Задается размер пропеллера (в сантиметрах), мощность двигателя (в лошадиных силах), максимальная и средняя скорость летательного аппарата. Нажимается кнопка «Расчет». Результатом вычислений будут шаг и частота вращения винта.
Во втором варианте убираются все галочки. В соответствующие окна вводим мощность двигателя, частоту вращения винта, максимальную и среднюю скорость летательного аппарата. Нажимаем кнопку «Расчет». Результатом вычислений будут диаметр винта и его шаг.
Третий вариант расчетов предназначен для профессионалов. Метка ставится в поле «Указать параметры винта». В соответствующие окна записываются диаметр и шаг винта. Нажимается кнопка «Расчет». Результатом является профиль лопасти воздушного винта, который можно изучить в окне просмотра, меняя его масштаб и удаление от ступицы. В виде таблиц результат сохраняется в файле Date.html, присутствующем в каталоге программы.
Кроме того, программа может показать, как выглядит профиль лопасти под реальным углом наклона (галочка в поле «Профиль с углом»), а также продемонстрировать точки, по которым производился расчет (метка в поле «Показывать расчетные точки»).
Полученный профиль можно распечатать в масштабе 1:1.
Коаксиальные конструкции [править]
В коаксиальных конструкциях ВМГ расположены попарно друг под другом – соосно. Существует устоявшееся мнение, в том числе подтверждённое практикой, что две коаксиальные ВМГ (то есть расположенные так, что одна находится в воздушном потоке другой) менее эффективны, чем две ВМГ, разнесённые в пространстве (например, расположенные в одной плоскости, как в классических конструкциях мультикоптеров). Таким образом, единственным аргументом «за» при выборе коаксиальной конструкции считается компактность аппарата.
В коаксиальных конструкциях можно частично решить проблему срыва потока с пропеллера – сближением пропеллеров так, чтобы шаг между пропеллерами был меньше чем шаг “мёртвого” вихря. Частично – потому что сближение пропеллеров увеличивает их эффективность, но только в узком диапазоне скоростей вращения лопастей. [2]
Проверка эффективности пар разнокалиберных пропеллеров
Количество и форма лопастей
Классическим вариантом является наличие у пропеллера двух лопастей. Впрочем, на самых маленьких моделях применяют воздушные винты с тремя, четырьмя и даже пяти лопастями. Понятно, что многолопастный воздушный винт снижает уровень турбулентности за счет создания более равномерного потока.
Более того, дополнительные лопасти увеличивают общую площадь винта, что благотворно отражается на подъемной силе квадрокоптера. Из этого следует, что многолопастный винт меньшего диаметра способен создавать ту же подъемную силу, что и более крупный классический пропеллер.
Советуем обратить внимание на разницу в форме окончания реквизитов. Они бывают трех видов – Normal, Bullnose (BN), Hybrid Bullnose (HBN). Винты Normal имеют заостренные на концах лезвия, создают меньшую тягу, но способствует эффективному расходу энергии аккумулятора.
Винты BN при равном диаметре имеют большую площадь и тягу. Дополнительный вес на кончиках лопастей увеличивает крутящий момент и улучшает чувствительность летательного аппарата по оси рысканья. К сожалению, эти положительные моменты сопровождаются высоким энергопотреблением и снижением времени полета. Пропеллеры HBN занимают промежуточную позицию.
Контроллер
Мой выбор контроллера для этого коптера также пал на достаточно редкий вариант — Naze32.

(изображен использованный мной клон Flyduino MW32)
Naze32 — по сути порт MultiWii на современное железо. Используется 32-битный процессор STM32F103, гироскоп и акселерометр MPU6050 (также установлен дополнительный акселерометр MMA8452, некоторые версии ПО используют его вместо MPU), барометр MS5611 и магнетометр HMC5883L. Почему я выбрал именно этот вариант:
Приемник GPS я взял обычный uBlox CN-06 (~50$). Можно былo ограничиться на 10г болеe легким модулем Mediatek, но он значительно медленнее и нe настолько точен — для хорошей жe работы функций типа return-to-home точность и скорость обновления критична, поэтому везде рекомендуют использовать uBlox.
Конфигурация baseflight/harakiri
Конфигурация ПО делается в два шага — сначала основные параметры настраиваются через командную строку, а потом используется стандартный интерфейс от MultiWii для настройки PID-контроллеров, AUX-каналов и иже с ними. Вооружаемся Putty или любым другим терминальным клиентом, вновь подключаем контроллер к USB, открываем подключение к последовательному порту и сразу жмем “#”, чтобы контроллер вошел в интерактивный режим:
Выполняем основную конфигурацию — задаем тип коптера (трикоптер), включаем функции GPS и PPM (если используем — PPM это режим вывода сигнала из приемника д/у, при котором всe каналы передаются через один кабель), задаем карту каналов (порядок каналов д/у, ответственных за четыре оси управления и AUX — он разный у разных д/у систем). Сохраняем, контроллер перезагружается.
mixer tri
feature gps
feature ppm
map TAER1234
saveЗакрываем терминал, и открываем MultiWii GUI 2.1. Там, как и с любым обыкновенным MultiWii-контроллером, задаем функции AUX-каналов, проверяем диапазоны каналов д/у и настраиваем их так, чтобы границы были как можно ближе к 1000/2000, а середина к 1500, проводим калибровку акселерометра и магнетометра.
Все, можно лететь. Первый тест с коптером такого веса и размера можно легко выполнить сразу на месте, крепко удерживая его в руке (вообще эту процедуру рекомендовать я бы не стал, но при 550г веса и ~1.4кг максимальной тяги его достаточно легко удержать): запустить моторы на минимальный газ и покрутить коптер вокруг всех осей, проверив, что он правильно реагирует (противится движению). Если сервомотор наклоняет задний мотор не в ту сторону, это можно поменять в командной строке:
set yaw_direction = -1Еще одна деталь, из-за которой мне пришлось поковыряться в параметрах: USB-порт на контроллере Naze32 находится сзади. При установке на моем коптере, однако, там находится GPS, и порт оказывается закрыт. Поэтому я решил повернуть контроллер на 90°. Этo возможно — необходимо лишь поменять оси сенсоров в параметрах; чтобы не было слишком просто, оси у гироскопа, акселерометра и магнетометра все разные (даже несмотря на то, что гироскоп и аксемерометр объединены в одном чипе). С помощью форума FPV-Treff удалось найти правильные команды для поворота на 90° по часовой стрелке:
set align_mag_z = -2
set align_mag_y = -3
set align_mag_x = -1
set align_acc_z = 3
set align_acc_y = -2
set align_acc_x = -1
set align_gyro_z = -3
set align_gyro_y = 1
set align_gyro_x = -2Выполнять их надо именно в этом порядке, иначе контроллер может зависнуть — видимо, где-то спрятан хитрый баг. После сохранения и перезагрузки обязательно проверяем правильность данных в интерфейсе MultiWii — справа показаны угол крена и тангажа, они должны теперь соответствовать положению повернутого контроллера.
Конфигурация osd
Раз мы уже делаем полноценный FPV-коптер, то не обойтись без OSD, который показывает информацию из контроллера на видео. С Naze32 прекрасно работает MinimOSD, с Harakiri даже со стандартной прошивкой, так как в отличие от BaseFlight Harakiri поддерживает протокол MAVLink. Однако существует ещe такая прекрасная прошивка для MinimOSD под названием
. Она вообще предназначена для работы с MultiWii-контроллерами, но прекрасно работает с Naze32, и в отличие от стандартной и других прошивок позволяет изменять PID-параметры контроллера с помощью пульта д/у через экранное меню. Это сильно сокращает время на настройку этих самых параметров, которые обычно меняются только через GUI на компьютере.
MinimOSD — это миниатюрная плата с OSD чипом MAX7456 и процессором ATmega 328p, совместимая с Arduino. Для прошивки и настройки необходим лишь FTDI-адаптер, так как на плате нет разъема USB.
Сначала подключаем MinimOSD через FTDI в USB-порт и открываем Arduino. Открываем стандартный скетч EEPROM Clear, выбираем нужный COM-порт, выставляем плату Arduino Pro or Pro Mini (5V, 16 MHz) w/ ATmega 328, заливаем. Ждем пару секунд пока загорится светодиод на плате — память старой прошивки стерта. Качаем сорцы KV-Team-OSD версии r345 или r370, открываем и добавляем следующие строки в config.h:
Компилируем, заливаем. Закрываем Arduino, подключаем питание к OSD-стороне платы (там нужны 12В, иначе чип MAX7456 не получает питания; альтернативно на некоторых версиях можно соединить несколько контактов припоем и запитать MAX7456 от 5В, тогда ни в коем случае нельзя подключать со стороны камеры и передатчика)
, и открываем GUI от KV-Team-OSD. Сделан он на том же Processing, что и MultiWii GUI, и выглядит соответственно похоже. Заливаем шрифт на чип MAX7456, нажав Upload, дожидаемся окончания процесса. Выставяем параметры: плата Minim, не показывать RSSI и прочую фигню, показывать напряжение из данных MultiWii (если у нас подлючен соответствующий кабель на контроллере), показывать данные GPS кроме координат, ну и все остальное по желанию.
Если в этот момент уже подключены и запитаны камера и передатчик, то на видео сразу по нажатию Write видны изменения в настройках. Для полного удовлетворения можно включить симулятор внизу в GUI и поиграться с симуляцией, посмотрев, как будет изменяться картинка OSD в полете.
По завершению всех настроек не забываем нажать Write, отключаем адаптер FTDI и подключаем MinimOSD к Naze32 — пины TX и RX находятся в середине контроллера, 5В и землю можно взять напрямую с одного из BEC-ов регуляторов, или со свободного разъема на контроллере.
Методы установки
Установить винты на квадрокоптер можно по-разному. Очень часто вал электродвигателя представляет собой простой металлический штырь, не имеющий каких-либо приспособлений для установки пропеллера. В этом случае применяют специальные переходники – пропсейверы и цанговые зажимы.
Пропсейвер (см. фото) удобно использовать для проведения экспериментов при создании самодельных моделей. Он выглядит как втулка, в боковой поверхности которой имеется два симметричных отверстия с установленными в них винтами. Приспособление устанавливается на вал, а винты затягиваются. Пропеллер также надевается на вал и фиксируется двумя нейлоновыми стяжками или резиновым кольцом.
Более надежным переходником является цанговый зажим. Он представляет собой резьбовое соединение с разрезной конусообразной втулкой. Цанга надевается на вал, далее устанавливается зажимная втулка, пропеллер и шайба. Вся конструкция фиксируется гайкой особой формы – коком.
Если ротор бесколлекторного двигателя находится снаружи (моторы класса Outrunner), то на его верхней поверхности обычно имеется несколько резьбовых отверстий для установки различных переходников и креплений.
У производителей готовых коптеров с бесколлекторными моторами очень популярен вариант с самозатягивающимися гайками от компании DJI . У таких двигателей вал заканчивается резьбой, противоположной направлению вращения ротора.
Направление вращения
Традиционно, мультикоптеры оснащены двумя типами двигателей:
Половина двигателей (и винтов) дрона вращается по часовой стрелке, половина – против.
Для наглядности: куда приподнята кромка лопасти, в ту сторону и вращается пропеллер.
Варианты установки электромотора зависят от типа беспилотника. Основные схемы показаны на рисунке:

Балансировка
Качество винтов для мультикоптера определяется точностью их изготовления. С высококлассными пропеллерами не требуется дополнительная балансировка, а вибрации в работе винтомоторной группы практически отсутствуют.
Большинство бюджетных запчастей трудно назвать сбалансированными на 100%. Их отличает высокий шум работы мотора, вибрации и нестабильность полета.
Если коптер предназначен для видеосъемки – обязательно присутствие «эффекта желе» на картинке, качество съемки низкое, а изнашиваемость беспилотника (двигатели, подшипники, шестерни) – высокая, что в конечном итоге сказывается на дороговизне техобслуживания аппарата.
Для точной балансировки понадобится специальное приспособление – балансир и немного терпения.
Принцип работы прибора простой. Ось, на которую надевается пропеллер,установлена строго горизонтально и вращается с минимальным трением. Сбалансированный винт должен «замирать» в любом положении. В противном случае, более тяжелая сторона опускается вниз и ее тонкий торец нужно «корректировать» наждачной бумагой (стирать, избегая появления заусениц).
Не отбалансированные винты – причина вибрации аппарата, что негативно влияет на стабильность полета.
Как видим, не все так просто в «царстве дронов», но при правильном подходе в выборе новых пропеллеров, вы получите наилучший результат, если собираете беспилотник собственными руками или устраняете огрехи серийного производства в моделях RTF-комплектации.
Научные интересы магистранта адамовского в.в.
К этой группе относятся вертолеты, имеющие больше двух несущих винтов.Реактивные моменты уравновешиваются за счет вращения несущих винтов
попарно в разные стороны или наклона вектора тяги каждого винта в нужном направлении.Существуют несколько типов мультикоптеров, различающихся
количеством и расположением двигателей относительно центра аппарата. Основные разновидности(Рисунок 1) включают в себя трехроторные (трикоптеры),
четырехроторные (квадрокоптеры), шестироторные (гексакоптеры), восьмироторные (октокоптеры) и даже более сложные конфигурации.
У каждого из типов существуют свои достоинства и недостатки. Трикоптеры наиболее дешевы (т.к. число моторов и регуляторов равно трем),
наиболее просты в изготовлении, однако имеют небольшую взлетную массу и эффективность из расчета потребляемой мощности на 100 грамм полезной
нагрузки.Также трикоптеры наиболее подвержены авариям: при отказе одного двигателя весь аппарат падает на землю и разбивается.Квадрокоптеры
имеют такую же простую конструкцию, как и трикоптеры, но имеют чуть большую эффективность – они могут поднять в воздух на 30% больше груза за
счет дополнительного мотора. Недостатки такие же: при отказе одного мотора аппарат неизбежно упадет и разобьется, поэтому поднимать в воздух
какую-бы то ни было полезную нагрузку на таких аппаратах очень опасно.Гексакоптеры имеют еще более большую взлетную массу и величину полезной
нагрузки, однако они и более дороги за счет 6 моторов и 6 регуляторов. Преимуществом таких машин является их относительная живучесть: при отказе
одного мотора есть возможность произвести аварийную посадку вместо свободного падения.

Рисунок 1.Классификация мультикоптеров
Достоинства мультикоптеров:
-низкая стоимость (20-100 т.р.);
-маневренность, способность зависания в воздухе;
-вертикальный взлет и посадка, быстрый набор высоты и снижение;
-возможность летать на очень низких высотах;
-малые габариты, простота и надежность конструкции;
-малошумность и экологичность.
Основные составляющие элементы квадрокоптера.
Рама. Рама является основой конструкции квадрокоптера. От нее зависит компоновка узлов, внешний вид, эстетика, крашеустойчивость.
и удобство ремонта.Рама квадрокоптера состоит из четырех лучей (балок) и крестовины, на которой крепится основная плата. Материал лучей – обычно
алюминиевые профили,карбоновые трубки, или дерево. Материал крестовины – пластик, карбон, текстолит или даже фанера.

Рисунок 2.Рама квадрокоптера
Основная плата. Основная плата – полетный контроллер (FlightCtrl) является центральной и обязательной частью любого квадрокоптера.
Эта плата состоит из главного процессора и из датчиков, которые необходимы для обеспечения устойчивого полета. Полетный контроллер получает сигналы
из приемника и выдает управляющие сигналы на силовую часть и подвес камеры.
Распространенные датчики таковы:
• Гироскоп – контролирует положение квадрокоптера по трем осям.
• Акселерометр – контролирует мелкие неравномерные (равноускоренные) движения.
• Барометр – контролирует высоту.
• GPS – определяет абсолютные координаты аппарата в пространстве, неточен на малых расстояниях, но незаменим на больших и для планирования полета.
• Компас – идет в паре с GPS, определяет абсолютное направление системы. Квадрокоптер, оснащенный GPS и компасом может совершать самостоятельные полеты и возвращаться в точку старта.

Рисунок 3.Основная плата квадрокоптера
Силовая часть. Силовая часть – это бесколлекторные двигатели с пропеллерами и контроллеры скорости вращения двигателей. В отличие от обычного электродвигателя, у которого имеется подвижная часть – ротор и неподвижная – статор, у бесколлекторного двигателя подвижной частью является как раз статор с постоянными магнитами, а неподвижной частью – ротор с обмотками трех фаз. Для того, чтобы заставить вращаться такую систему, необходимо осуществлять в определенном порядке смену направления магнитного поля в обмотках ротора – тогда постоянные магниты статора будут взаимодействовать с магнитными полями ротора и подвижный статор прийдет в движение. Это движение основано на свойстве магнитов с одноименными полюсами отталкиваться, а с противоположными – притягиваться.
ESC (Electronic Speed Controller) – регулятор скорости вращения двигателя. Регулятор представляет собой микроконтроллер с прошитой в него программой и силовые ключи для управления обмотками мотора. Конструктивно, чаще всего регулятор представляет собой плату, засунутую в термоусадку.

Рисунок 4.Бесколлекторный двигатель
Рисунок 5.Регулятор скорости вращения двигателя
Пропеллеры. В конструкции квадрокоптера используются особые пропеллеры с рабочим режимом вращения по часовой стрелке и с рабочим режимом вращения против часовой стрелки. Такая конфигурация необходима для компенсации вращающего момента, возникающего при вращении пропеллера, стремящегося развернуть платформу. Наличие двух пропеллеров, вращающихся в одну сторону и двух – в другую, компенсирует этот крутящий момент. А при необходимости повернуть платформу, изменяется скорость определенных винтов, что выводит систему из равновесия, вызывая поворот платформы.

Рисунок 6.Пропеллер
Аккумуляторные батареи. Наиболее целесообразно использовать литий-полимерные (LiPo) аккумуляторные батареи. Они легкие, имеют очень высокую емкость по отношению к их весу и размеру, высокие отдаваемые токи, возможность быстрого заряда. При выборе аккумуляторной батареи перед разработчиком стоит главная задача – обеспечить требуемое время полета квадрокоптера.

Рисунок 7.Аккумуляторная батарея
Чаще всего БПЛА находят применение для мониторинга различных объектов. Обычно задачи мониторинга включают сбор информации, измерение некоторых параметров объекта или окрестностей локальной зоны и (или) отображение собранных данных. Информационный обмен между БПЛА и станцией управления обеспечивается посредством радиоканала.
Помимо мониторинга БПЛА можно использовать для выполнения других функций, таких как доставка небольших грузов, распыление химических реактивов над объектом, выполнение функции ретрансляционной радиорелейной станции для коммуникации с труднодоступными объектами и т.д.
Обычно бортовой источник энергии – батарея литий-полимерных аккумуляторов, может обеспечить типичное время полета приблизительно 20-30 минут. После этого необходима перезарядка или замена аккумулятора. Очевидно, такого времени обычно недостаточно для исследования или обслуживания объекта. Часто требуется длительный (иногда 24-часовой) мониторинг. Примеры объектов, где требуется непрерывный мониторинг:
– естественные объекты с катастрофическим развитием ситуации (затопляемые области, вулканы и гейзеры, лавины и оползни и т.д.);
– индустриальные постройки, находящиеся под угрозой разрушения;
– городские улицы с затрудненным движением транспорта.
Решение проблемы обеспечения длительной (непрерывной) работы группы электрических БПЛА может параллельно идти по нескольким направлениям:
– поиск более емких и легких источников питания;
– поиск более эффективных схем построения самих летательных аппаратов;
– создание зарядных станций, включая:
– зарядные терминалы и схемы быстрой зарядки;
– системы посадки БПЛА на зарядную станцию;
– системы диспетчирования полетов группы БПЛА.
Таким образом, при создании зарядной станции для электрических БПЛА как базы для их полетов необходимо решить научно-техническую задачу: разработать подсистему автоматической посадки БПЛА на зарядную станцию.
По форме лопасти бывают:
- Normal (N) — с заостренными концами. Уменьшают силу тяги, снижают расход энергии батареи;
- Bullnose (BN) — закругленные края. Обладают большей площадью, создают больше тяги. За счет дополнительного веса на кончиках обеспечивают стабильность аппарату, увеличивают отзывчивость по рысканию — вращению вокруг вертикальной оси квадрокоптера. Минус — высокое энергопотребление, небольшая продолжительность полета;
- Hybrid Bullnose (HBN) — среднее между BN и N.
Винты вращают электродвигатели, половина которых крутится по часовой стрелке (CW), а другая половина — против нее (CCW). Определить направление вращения можно по поднятой кромке лопасти, которая смотрит в сторону вращения.
Вращаясь, пропеллер разгоняет воздух вокруг себя, толкает его вниз, где создается более высокое давление, чем окружающая атмосфера. Разница давлений поднимает квадрокоптер вверх.
Пластиковые пропеллеры — самые распространенные и недорогие. Гибкие винты устойчивы к повреждениям, но часто возникают проблемы с их точной балансировкой, что вызывает нарушение в работе гироскопов и отражается на качестве отснятых камерой кадров. Углеродное волокно (карбон) считается лучшим материалом для пропов.
Карбоновые винты стоят не дешево, но это оправдано — прочные, жесткие лопасти не утяжеляют вес коптера, не теряют свою форму, их легко сбалансировать. Пластик, усиленный карбоновым волокном, по прочности сравним с карбоном, а по цене — с обычным пластиком.
Поставленная задача
Для этого коптера я поставил себe следующие задачи:
- Высокая маневренность: хотя мой квад неповоротливым назвать не получается, но тем не менее, при весе в 2.2кг и с дорогой камерой на относительно хрупком подвесе спереди исполнять на нем фигуры высшего пилотажа как-то рука не поднимается. Хотелось коптер, на котором можно будет крутить бочки и петли вокруг деревьев без задних мыслей.
- Удароустойчивость: требование непосредственно связано с первым. Долго чинить коптер после каждой неожиданной посадки в дерево — не дело, аппарат должен держать удар.
- Время полета: хотя бы 10-15 минут, менять аккумуляторы чаще — ужe неинтересно.
- Легкий вес: данное требование исходит из трех предыдущих. Чем легче коптер, тем проще ему менять направление полета, тем меньше энергия столкновения с чем-либо, и тем дольше он провисит в воздухе на одной батарейке.
- Компактность: хотелось аппарат, который помещается в рюкзак, чтобы можно было его без проблем брать с собой в общественном транспорте и при пеших походах.
Исходя из этих требований, я опять сел за LibreCad, и нарисовал вот что:
Размеры: расстояние между передними моторами — 27см, диаметр пропеллеров — 8″.
Правила установки винта на дрон
В комплект квадрокоптера входят детали для сборки, в том числе лопасти и защита. Как их установить? С защитой все предельно просто — найдите паз на луче дрона, вставьте в него рамку детали до упора.
Чтобы правильно установить пропеллеры на квадрокоптер, внимательно следите, какой винт куда ставить. На моторе есть обозначения направления вращения двигателя (буквы, метки). Такая же маркировка стоит и на лопастях. Эти маркировки должны совпадать.
Пример установки пропеллера на коптеры Syma, QS UAV:
- Устанавливаете винт на вал.
- Ставите пластмассовый фиксатор, совмещаете выемки.
- Придерживая лопасти, поворачиваете их до щелчка — с меткой А по часовой стрелке, с меткой Б — против часовой стрелки.
- Сверху ставите защитный колпачок (заглушку).
Чтобы снять пропеллер, снимите заглушку, поверните фиксатор против часовой стрелки и снимите его. Потяните вверх за винт и снимите его с вала.
Существенно облегчают установку быстросъемные адаптеры для пропеллеров. Переходник состоит из двух частей — одна крепится на мотор, другая — на винт. Пропеллер легко накручивается на двигатель правого или левого вращения и так же снимается. Такой вариант удобен для частой перевозки квадрокоптеров, например, на соревнования.
Винты, которые вы покупаете отдельно, идут в наборе по 2, 4, 6 штук. Есть лопасти с интегрированной гайкой прямого и обратного вращения для быстрой установки и съема, предотвращающей их откручивание в полете.
Если двигатель — просто штырь, без дополнительных элементов для сборки, вам понадобятся втулки-переходники, которые ставят на вал и затягивают болтами. Сверху поставьте пропеллер, закрепите его нейлоновыми стяжками или резиновым кольцом.
Еще один вариант крепления — цанговый зажим. Цангу поставьте на вал, затем — зажимную втулку с пропеллером и шайбой, зафиксируйте конструкцию коком (гайкой особой формы).
Сборка
Итоговая сборка коптера в картинках:
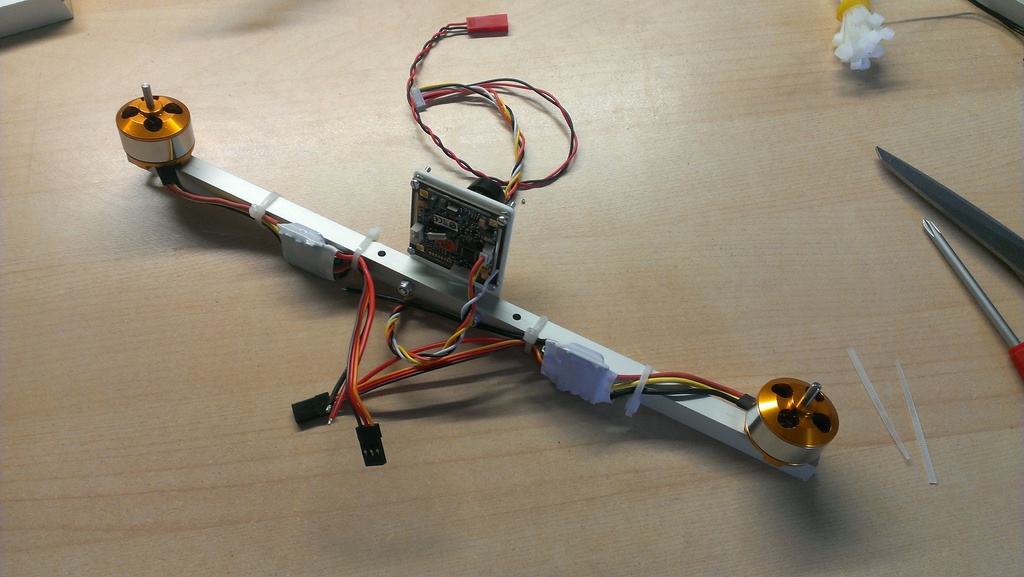
Передние моторы, их регуляторы и FPV-камера установлены.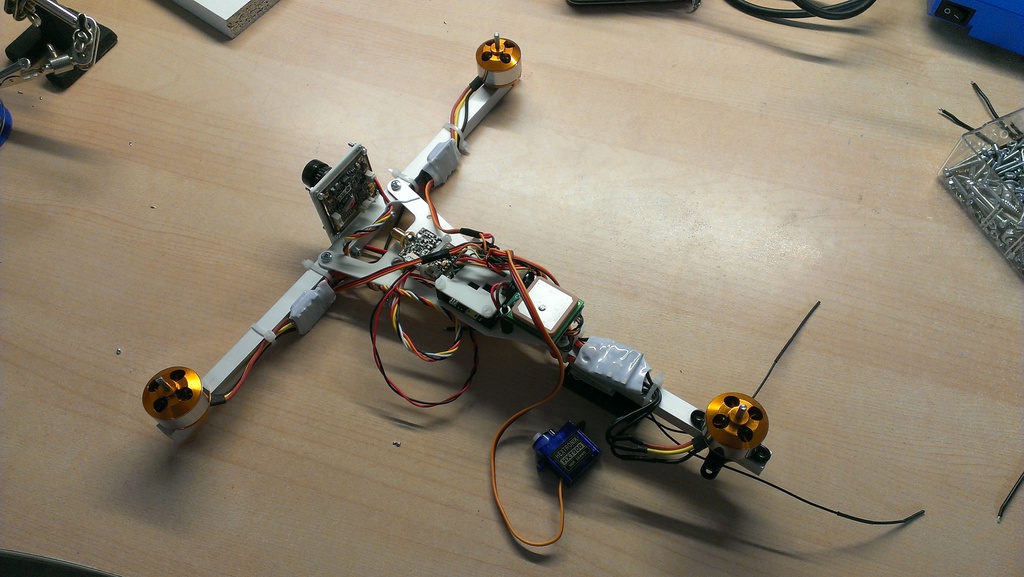
Вся электроника установлена на верхней полураме: спереди видеопередатчик, дальше контроллер, за ним GPS и сзади регулятор и (пока еще жестко прикрученный) третий мотор. Сбоку лежит сервопривод.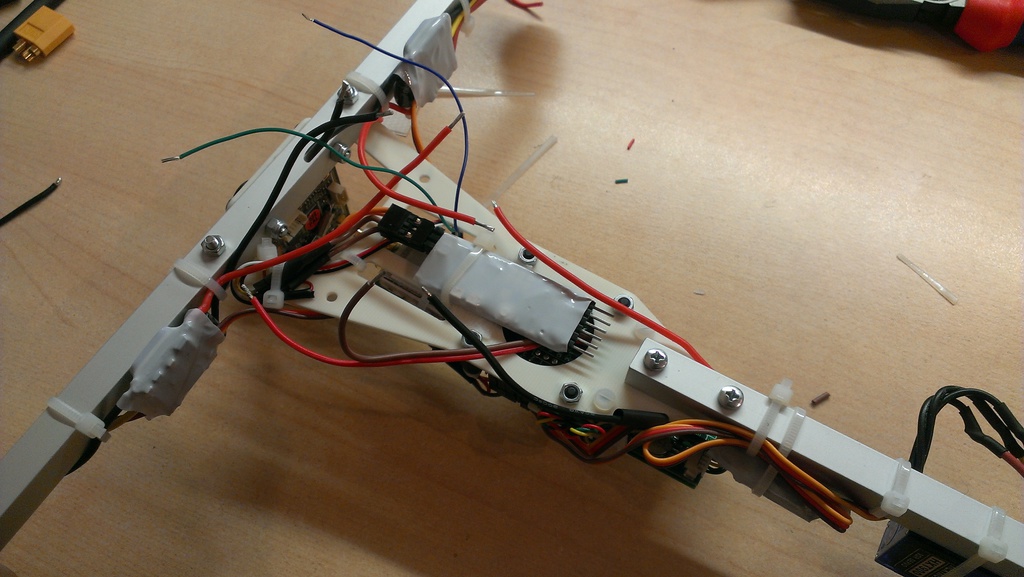
Вид снизу: посередине MinimOSD в белой термоусадке, вокруг куча проводов.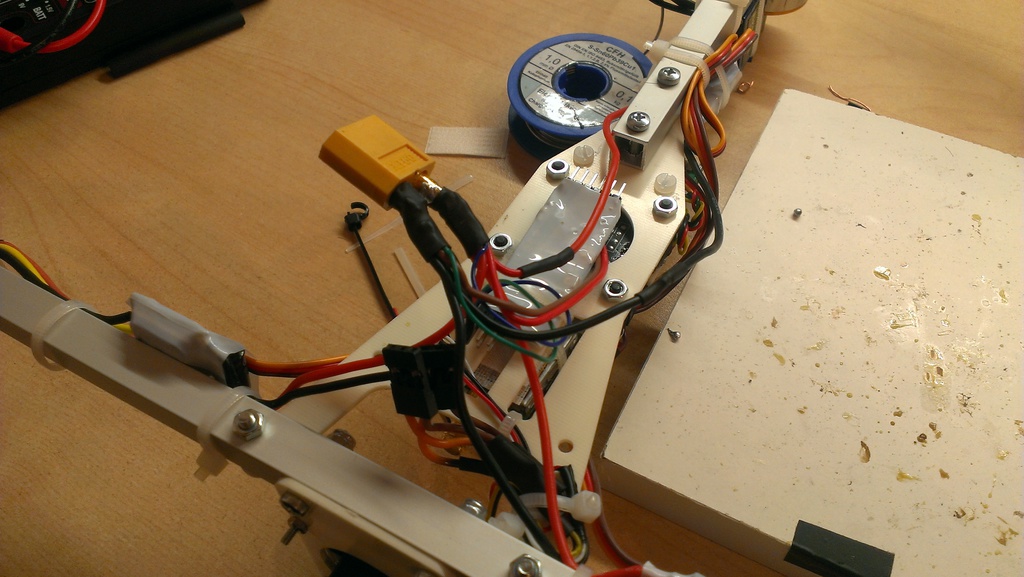
Куча проводов слегка упорядочена, припаян коннектор для аккумулятора (обычный желтый XT60). Чем хороши 3S аккумуляторы — их напряжением в 11-12,6В можно напрямую питать 12-вольтовые девайсы, в данном случае камеру и передатчик. Не нужны отдельные BEC’и, экономится вес.
Установлена механика заднего мотора, сервопривод и собственно мотор. В качестве оси шарнира я взял 3мм карбоновый стержень, он очень легкий и прочный. Отверстия под него рассверлены таким образом, что в верхней половинке шарнира он сидит плотно, а в нижней свободно вращается. Для спокойствия он также закрепен каплей клея возле мотора. Снизу висит приемник д/у Graupner GR-16.
Готовый коптер на кухонных весах. Старые аккумуляторы Turnigy на 20 грамм тяжелее новых Zippy Compact, на которых я сейчас летаю — таким образом итоговый вес сейчас 550 грамм, в четыре раза меньше моего квада.
Однако сборка коптера — это еще нe все.
Статьи в тему:
Как выбрать квадрокоптер для начинающего: подсказки и советы из практики
Селфи-дрон: что это, в чем преимущества и какой выбрать
Для чего в квадрокоптере барометр или Как работает режим удержания высоты
Квадрокоптер с функцией «follow me»: дрон, который всегда рядом
«Headless mode»: что это такое, с чем его едят и нужен ли этот полетный режим в квадрокоптере
Можно ли запускать квадрокоптер зимой или Что делать если «очень хочется»
Как запустить квадрокоптер. Только для начинающих пилотов: включение, калибровка, триммирование
Техника
Раму я решил собирать из алюминиевого профиля и стеклопластиковых пластин, вырезанных на фрезеровочном станке. Алюминий дает абсолютно достаточную жесткость на коптере этого размера, и весит такая конструкция очень немного. Дальше я подобрал следующие электронные компоненты:
Регуляторы я перепрошил прошивкой
— она намного улучшает скорость реакции мотора на изменение заданных оборотов контроллером, поддерживает высокую частоту обновления входного сигнала, и вообще считается must-have для коптеров нa регулях, которые еe поддерживают.
Механику наклона я подходящую в продаже нигде не нашел, и решил делать сам — благо не так давно образовался доступ к 3D-принтеру. Разобравшись за вечер с FreeCAD, нарисовал следующие детали:
Получился шарнир с креплением на 10мм квадратную трубу, отверстием под 3мм ось, и креплением для мотора со стандартными отверстиями.
Установка винтов квадрокоптера. дрон — как правильно установить лопасти винты. сборка квадрокоптера
В этом видео рассказывается как правильно установить винты на квадрокоптер syma, как их правильно закрепить и не перепутать направление вращения. Многие не правильно устанавливают винты, т.е. без учёта направления вращения и потом жалуются, что квадрокоптер не взлетает.
Дрон — квадрокоптер будет себя вести не адекватно, если вы перепутаете направление вращения винтов или моторов при их замене. Если же вы правильно установили винты, то у вас никогда не возникнет проблемы, что квадрокоптер не взлетает, при условии, что все двигатели работают исправно и не перепутана их установка.
Поэтому, прежде чем паниковать и думать что делать если квадрокоптер не взлетает, проверьте правильность установки винтов и направление их вращения и ваша проблема с большой степенью вероятности будет решена. Смотрите как правильно собрать винты квадрокоптера и наслаждайтесь полётом.
Vitalik Havriluk Hace 16 días
Не взлітає що робити
Vyachek-Life Hace 6 días
То треба шукати проблему. Дуже мало iнформацii.
Liz Mitchel Hace 9 meses
у него тонкий вал мотора! и без надпилов!
PHANTOMKA Hace 11 meses
То есть спереди 2 винта А,сзади 2 винта В ?Показано только одна сторона,а на второй как?
Vyachek-Life Hace 11 meses
На кавадрике должно быть подписано куда какие винты ставить. Если я не ошибаюсь, А и В чередуются, т.е. стоят по диагонали друг от друга, но за точность не ручаюсь. Квадрик уже давно продал.
не рванет? Hace un año
Спасибо а-то я думал что квадрокоптера сломался а оказывается винты неверно поставил
