
Что такое робототехника?
Робототехника — это отрасль технологии, которая занимается роботами. Роботы — это программируемые машины, которые обычно могут выполнять серию действий автономно или полуавтономно.
На наш взгляд, есть три важных фактора, которые определяют робота:
- Роботы взаимодействуют с физическим миром с помощью датчиков и исполнительных механизмов.
- Роботы программируются.
- Роботы обычно автономны или полуавтономны.
Существует много мнений о том, что представляет собой «робот». Некоторые эксперты говорят, что робот должен уметь «думать» и принимать решения. Однако стандартного определения «робототехнического мышления» нет. Требование робота «думать» предполагает, что у него есть определенный уровень искусственного интеллекта.
Робототехника включает в себя проектирование, создание и программирование физических роботов. Лишь небольшая его часть связана с искусственным интеллектом.
Что такое искусственный интеллект?
Искусственный интеллект (ИИ) — это отрасль информатики. Она включает разработку компьютерных программ для выполнения задач, которые требуют человеческий интеллект. Алгоритмы ИИ могут решать вопросы обучения, восприятия, решения проблем, понимания языка и / или логических рассуждений.
ИИ используется во многих отношениях в современном мире. Например, алгоритмы ИИ используются в поиске Google, в программе рекомендаций Amazon и в поисковых системах SatNav. Большинство программ ИИ не используются для управления роботами.
Даже когда ИИ используется для управления роботами, алгоритмы ИИ являются лишь частью более крупной роботизированной системы, которая также включает в себя датчики, исполнительные механизмы и программирование без ИИ.
Часто ИИ предполагает определенный уровень машинного обучения, когда алгоритм «обучен» реагировать определенным образом на определенный вход, используя известные входы и выходы.
Ключевым аспектом, который отличает ИИ от более обычного программирования, является слово «интеллект». Программы без ИИ просто выполняют определенную последовательность инструкций. Программы с ИИ имитируют некоторый уровень человеческого интеллекта.
Что такое искусственно интеллектуальные роботы?
Искусственно интеллектуальные роботы — это мост между робототехникой и искусственным интеллектом. Это роботы, которые контролируются программами ИИ.
Многие роботы не используют ИИ. До недавнего времени все промышленные роботы были запрограммированы только для проведения повторяющихся серий движений. Как мы уже говорили, повторяющиеся движения не требуют искусственного интеллекта.
Неинтеллектуальные роботы довольно ограничены в своей функциональности. Алгоритмы ИИ часто необходимы, чтобы робот мог выполнять более сложные задачи.
Давайте посмотрим примеры.
Пример 1: Робот без ИИ
Например, вы можете легко запрограммировать робота, чтобы забрать объект и поместить его в другое место. Робот будет продолжать выбирать и размещать объекты одинаково, пока вы не отключите его. Это автономная функция, так как робот не требует человеческого вмешательства после того, как вы его запрограммировали. Однако задача не требует никакого интеллекта.
Пример 2: Искусственно интеллектуальный робот
Представьте, что вы хотели добавить камеру к вашему роботу. Взгляд робота подпадает под категорию «восприятия» и обычно требует алгоритмов ИИ.
Например, скажем, вы хотите, чтобы робот обнаружил объект, который он собирал, и поместил его в другое место в зависимости от типа объекта. Это предполагает подготовку специализированной программы видения для распознавания различных типов объектов.
Atlas Unplugged
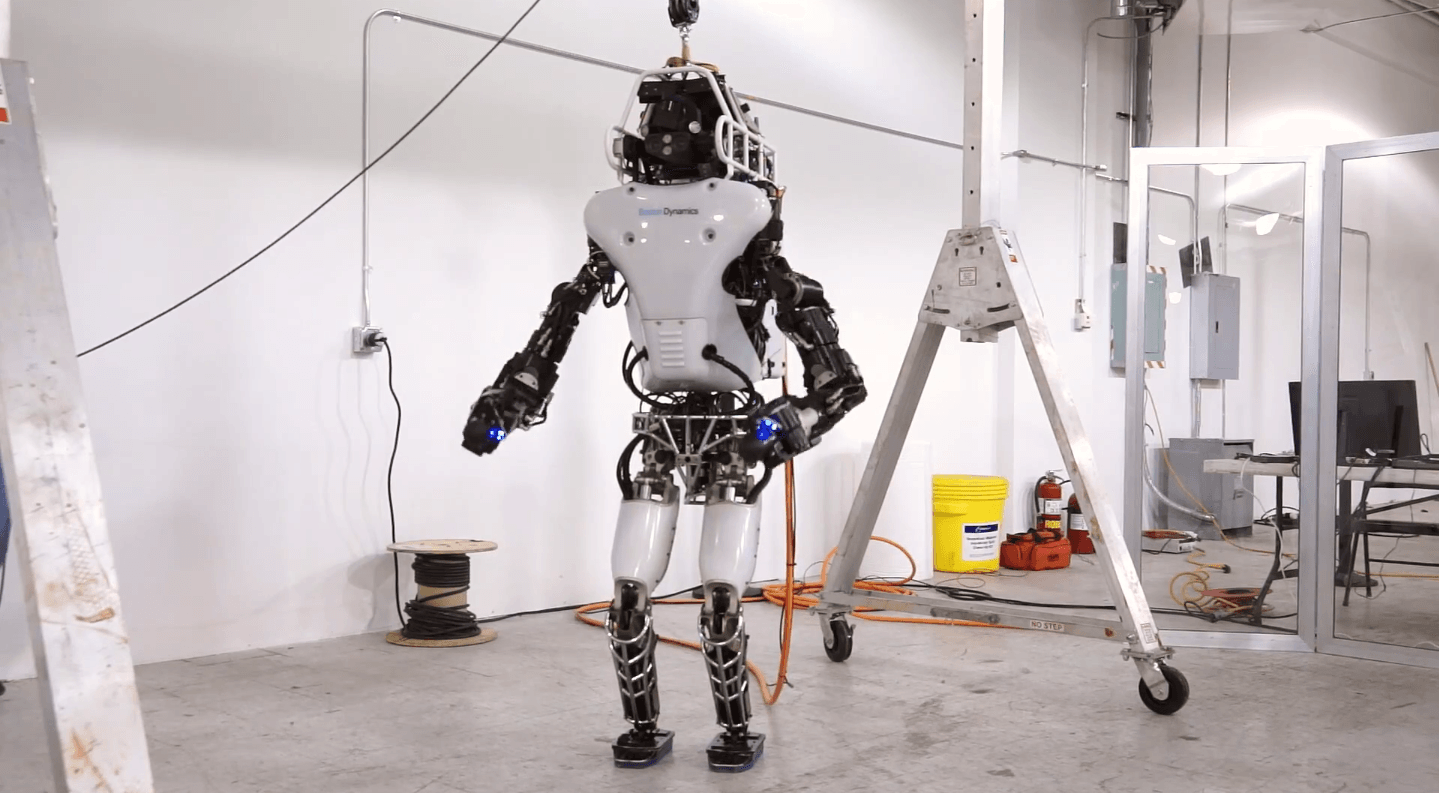
Последняя версия Atlas немного выше и тяжелее, чем предыдущая, ее высота составляет 1,88 м, а вес – 156,4 кг. По словам его создателей, 75% гуманоида обновлено — только нижняя часть его ног и стопы остались без изменений.
Робот Atlas был разработан компанией Boston Dynamics, принадлежащей Google, совместно с Управлением перспективных исследований и разработок Министерства обороны США. Atlas предназначен для перемещения по неровной открытой местности на двух ногах, он также может подняться с помощью рук и ног, как обычный человек.
. Роботы пол-дэнсеры – Lexy и Tess

На выставке CeBIT в Ганновере немецкий разработчик программного обеспечения собрал стенд, на котором выставил двух танцующих роботов вместе с роботом-диджеем с мегафоном на голове. Две девушки-робота двигаются в такт музыке возле пилонов, но все удивительно культурно. По информации BBC, вы можете приобрести такого робота за $39,500.
ASIMO и P-серия от Honda
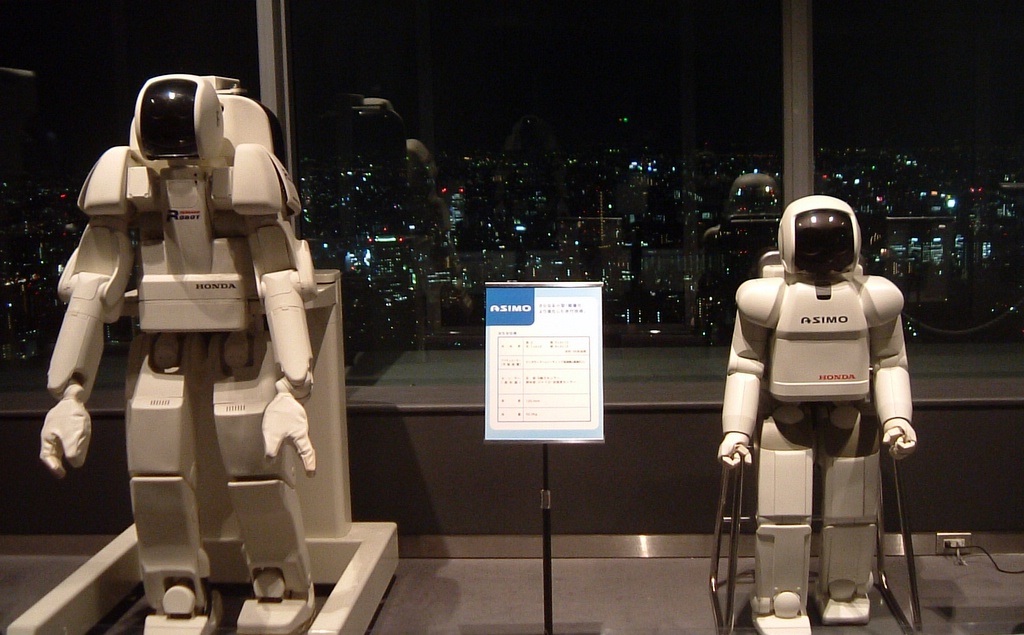
ASIMO является 11-м в линии шагающих роботов Р-серии, разработанных Honda. Представленный в 2000 году, ASIMO может ходить и бегать, как человек, что уже является удивительным. ASIMO был существенно обновлен в 2005 году, что позволило ему бегать в два раза быстрее (6 км/ч), взаимодействовать с людьми и выполнять повседневные задачи, например, держать тарелку и подавать еду. Количество текущих моделей ASIMO составляет 100 штук по всему миру, его высота — 1,28 м, а вес — около 55 кг.
ASIMO выглядит веселым и милым в своем скафандре. Он проложил путь для многих последующих моделей шагающих роботов, но все еще считается передовым и мощным роботом.
ASIMO является большим плюсом для международного брендинга Honda и помогает компании сформировать свой имидж в области инноваций и технологий. ASIMO также снимается в рекламных роликах для Honda и много выступает. Данный робот находится в этом списке из-за своего обаятельного внешнего вида, всемирной известности и передовых технологий разработки.
ICub
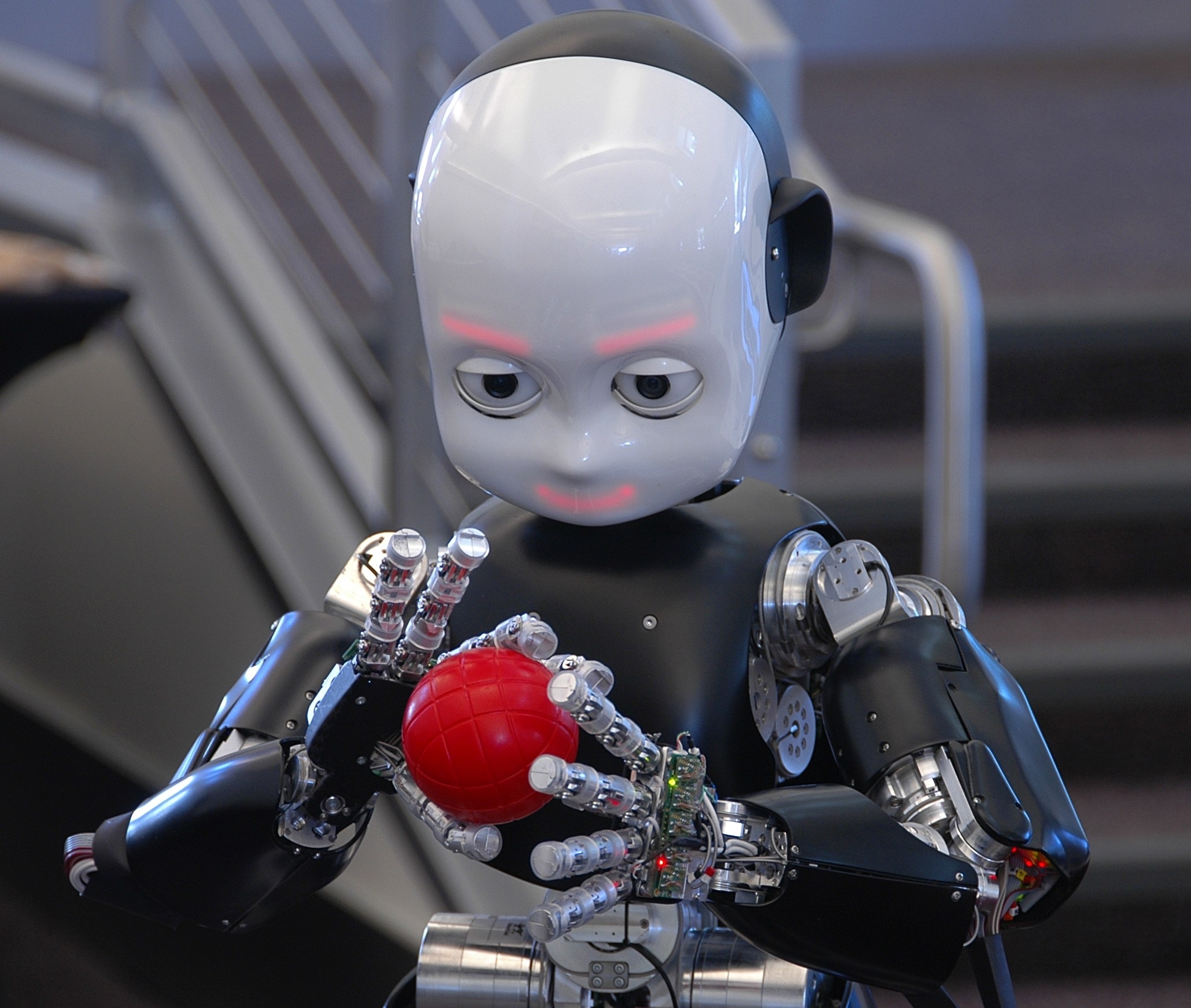
Внешность гуманоида является воплощенной гипотезой о познании.
Poppy
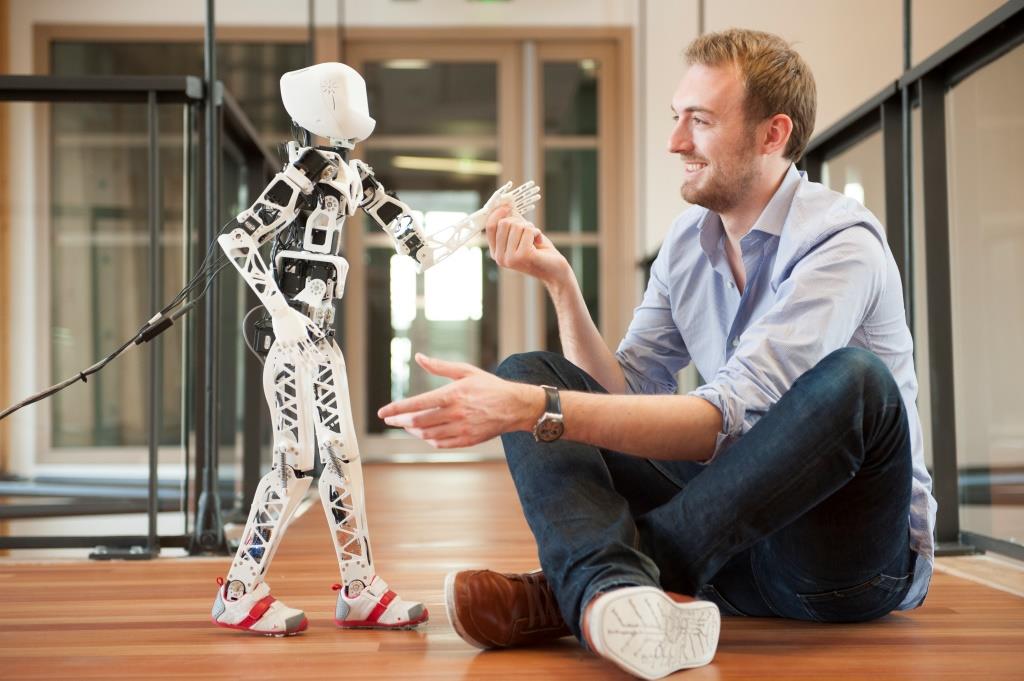
Poppy является одной из новейших разработок в сфере роботов-гуманоидов и первым в своем роде, ведь был создан с помощью 3D-принтера. Группа французских исследователей смогла сократить расходы на треть, используя новейшие 3D-технологии. Создатели Poppy сфокусировались на биологически правильной ходьбе, что, как они надеются, будет способствовать лучшему взаимодействию человека и робота.
У него есть позвоночник на шарнирах с пятью двигателями — почти неслыханное явление среди роботов такого размера. Позвоночник позволяет Poppy не только двигаться более естественно, но и помогает ему балансировать, регулируя его осанку. Дополнительная гибкость помогает при физическом взаимодействии с роботом — например, когда направляешь его своими руками, что в настоящее время необходимо, чтобы помогать роботу ходить. На видео вы можете увидеть невероятно естественную ходьбу робота – с пятки на носок.
Romeo
Romeo стремится стать лидером в области роботизированной помощи и личной помощи с более существенным эмоциональным компонентом. Romeo — потомок маленького человекоподобного робота по имени NAO, имеющего уже более 5000 продаж и договоров об аренде во всем мире.
Робот размером ребенка восьми лет (1,40 м), а весит немного больше (40 кг). Чтобы быть как можно более легким, его корпус выполнен из углеродного волокна и резины и был разработан таким образом, чтобы избежать риска причинения вреда человеку, которому он будет помогать. На сегодняшний день Ромео может ходить, различать трехмерное окружение, слышать и говорить.
График тестирования робота в реальных условиях планируется на 2023 год, конечная цель – готовность к использованию в домах престарелых в 2023-м или 2023 году. Разработка частично финансируется французским правительством и Европейской комиссией, проект бюджета на разработку Romeo составляет 37 млн. евро за период 2009-2023 гг.
Petman

Petman является антропоморфным роботом, предназначенным для тестирования одежды, защищающей от химического воздействия. Естественное движение очень важно для Petman, чтобы смоделировать ситуацию, когда солдат в защитной одежде подвергается внешнему воздействию в реальных условиях.
В отличие от предыдущих роботов для тестирования костюмов, которые имели ограниченный спектр движений и должны были поддерживаться механически, Petman балансирует и свободно перемещается; ходит, нагибается и выполняет разнообразные физические упражнения под воздействием химических радиоактивных веществ.
Petman также обладает имитацией физиологии человека в защитном костюме путем контроля температуры, влажности и потливости, чтобы обеспечить реалистичные условия испытаний. Система Petman была предоставлена для тестирования и в настоящее время проходит тестирование.
NAO
NAO представляет собой человекоподобного робота высотой 58 см. Он был создан, чтобы стать дружелюбными компаньоном для дома. С 2008 года выпущено уже несколько версий робота.
Самым известным экземпляром NAO является Nao Academics Edition, который разработан для университетов и лабораторий для помощи в научных исследованиях и образовании. Он был выпущен для учреждений в 2008 году и стал доступен для покупателей к 2023-му. Более поздние обновления для платформы Nao включают 2023 Nao Next Gen и 2023 Nao Evolution.
Роботы NAO использовались в сфере исследований и образования в многочисленных научных учреждениях во всем мире. По состоянию на 2023 год свыше 5000 роботов Nao используются в более чем 50 странах.
Aiko Chihira

Aiko Chihira может работать автономно, говорить и жестикулировать во время общения с людьми. Исследователи недавно продемонстрировали, что Aiko Chihira более продвинутее, чем среднестатистические подобные андроиды. Робот знает язык жестов и автоматически адаптируется к положению собеседника.
Д.а. добрынин
УДК
681.51
ИНТЕЛЛЕКТУАЛЬНЫЕ
РОБОТЫ
ВЧЕРА, СЕГОДНЯ, ЗАВТРА
Десятая национальная конференция по искусственному интеллекту с
международным участием КИИ-2006 (25-28 сентября 2006 г., Обнинск):
Труды конференции. В 3-т. Т.1. – М: Физматлит, 2006. – 310 с.
В
докладе рассматриваются вопросы применения технологий ИИ для роботов. Описывается
история, современное состояние, перспективы развития и модельные задачи для
интеллектуальных роботов.
Введение
Эволюция представлений о путях развития робототехники,
ее целях и задачах весьма схожа с тем, что наблюдается с такой областью, как
искусственный интеллект. Декларируемые общие принципы и, как казалось, понимание
путей достижения некой глобальной цели исследования сменилось узкой специализацией,
множеством частных, зачастую не связанных между собою подцелей и направлений.
Объясняется это тем, что поставленные изначально задачи
оказались значительно более сложными, требующими создания совершенно иных моделей,
методов и технологий, и прежде всего – технологий искусственного интеллекта.
Технологии искусственного интеллекта (ИИ) всегда были тесно
связаны с робототехникой. Не случайно одним из направлений ИИ до сих пор считается
целенаправленное поведение роботов (создание интеллектуальных роботов, способных
автономно совершать операции по достижению целей, поставленных человеком) [Поспелов,
1988].
Робот – это технический комплекс, предназначенный для выполнения
различных движений и некоторых интеллектуальных функций человека и обладающий
необходимыми для этого исполнительными устройствами, управляющими и информационными
системами, а также средствами решения вычислительно-логических задач [Попов
и др., 1990].
В настоящее время различают 3 поколения роботов:
·
Программные. Жестко заданная программа (циклограмма).
·
Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться)
в зависимости от обстановки. Изначально задаются лишь основы программы действий.
·
Интеллектуальные. Задание вводится в общей форме, а сам робот
обладает возможностью принимать решения или планировать свои действия в распознаваемой
им неопределенной или сложной обстановке.
Общепринято мнение, что интеллектуальный робот обладает
т.н. моделью внешнего мира или внутренней средой, что позволяет роботу действовать
в условиях неопределенности информации ([Попов и др., 1976]). В том случае,
если эта модель реализована в виде базы знаний, то целесообразно, чтобы эта
база знаний была динамической. При этом коррекция правил вывода в условиях меняющейся
внешней среды естественным образом реализует механизмы самообучения и адаптации.
Если отойти от подобного «перечислительно-функционального»
определения ИР, то останется лишь два более или менее конструктивных определения.
Первое заключается в том, что интеллектуальный робот – это робот, в состав которого
входит интеллектуальная система управления. Тогда достаточно только выбрать
определение интеллектуальной системы (ИС). Например, определить ИС как компьютерную
систему для решения задач, которые или не могут быть решены человеком в реальное
время, или же их решение требует автоматизированной поддержки, или же их решение
дает результаты сопоставимые по информативности с решениями человека ([Финн,
2004a], [Финн, 2004b]).
Кроме того, среди прочего подразумевается, что задачи,
решаемые ИС не предполагают полноты знаний, а сама ИС должна обладать способностями:
к упорядочению данных и знаний с выделением существенных параметров; к обучению
на основе позитивных и негативных примеров, к адаптации в соответствии с изменением
множества фактов и знаний и т.д. ([Финн, 2004b])
Другим, менее формальным, определением интеллектуальности
робота может быть способность системы решать задачи, сформулированные в общем
виде. Это определение является, не смотря на свою «слабость», достаточно
конструктивным по крайней мере для того, чтобы определить «степень интеллектуальности»
робота.
Итак, несмотря на множество предлагаемых критериев интеллектуальности,
самым сильным остается по-прежнему требование, согласно которому роль человека
при взаимодействии с ИР должна свестись лишь к постановке задачи.
На сегодняшний день считается, что в состав интеллектуального
робота должны входить:
Исполнительные органы – это манипуляторы, ходовая
часть и др. устройства, с помощью которых робот может воздействовать на окружающие
его предметы. Причем по своей структуре это сложные технические устройства,
имеющие в своем составе сервоприводы, мехатронные части, датчики, системы управления.
По аналогии с живыми организмами это руки и ноги робота.
Датчики – это системы технического зрения, слуха,
осязания, датчики расстояний, локаторы и др. устройства, которые позволяют получить
информацию из окружающего мира.
Система управления – это мозг робота, который должен
принимать информацию от датчиков и управлять исполнительными органами. Эта часть
робота обычно реализуется программными средствами. В состав системы управления
интеллектуального робота должны входить следующие компоненты:
Модель мира – отражает состояние окружающего робот
мира в терминах, удобных для хранения и обработки. Модель мира выполняет функцию
запоминания состояния объектов в мире и их свойств.
Система распознавания – сюда входят системы распознавания
изображений, распознавания речи и т.п. Задачей системы распознавания является
идентификация, т.е. «узнавание» окружающих робот предметов, их положения в пространстве.
В результате работы компонентов системы распознавания строится модель мира.
Система планирования действий – осуществляет «виртуальное»
преобразование модели мира с целью получения какого-нибудь действия. При этом
обычно проверяется достижимость поставленной цели. Результатом работы планирования
действий является построение планов, т.е. последовательностей элементарных действий.
Система выполнения действий – пытается выполнить
запланированные действия, подавая команды на исполнительные устройства и контролируя
при этом процесс выполнения. Если выполнение элементарного действия оказывается
невозможным, то весь процесс прерывается и должно быть выполнено новое (или
частично новое) планирование.
Система управления целями – определяет иерархию,
т.е. значимость и порядок достижения поставленных целей.
Важными свойствами системы управления является способность
к обучению и адаптации, т.е. способность генерировать последовательности действий
для поставленной цели, а также подстраивать свое поведение под изменяющиеся
условия окружающей среды для достижения поставленных целей.
Нечеткая логика находит применение, в основном,
на нижнем уровне для управления конкретными устройствами. Методы нечеткой логики
позволяют заменить решение дифференциальных уравнений для задач управления менее
ресурсоемкими логическими методами нечеткого вывода.
Нейронные сети изначально были хорошо приспособлены
для задач классификации. Первая модель перцептрона решала именно эту задачу.
Именно поэтому наиболее широкое применение нейронные сети находят в системах
распознавания образов. Возможно применение нейронных сетей для управления манипуляторами.
Ведутся попытки создания на базе однородных нейроподобных структур систем выбора
действий интеллектуальных роботов.
Рис. 1 Компоненты робота и
методы ИИ
Интеллектуальные системы являются необходимым компонентом,
решающим задачи создания модели мира, системы планирования действий и управления
целями. База знаний в интеллектуальных системах является одной из главных частей
модели мира и функций его преобразования.
Распознавание изображений давно стало необходимой
частью сложных робототехнических систем. Системы объемного зрения позволяют
получить информацию об ориентации объектов в пространстве. В этой области в
настоящее время происходят значительные изменения.
Распознавание и генерация речи необходимы для эффективного
общения с человеком. Без этих технологий полноценное общение с человеком невозможно.
В области генерации речи по тексту достигнуты значительные успехи. С распознаванием
речи дела обстоят хуже, поскольку это более сложная задача.
Многоагентные системы используются для коллективного
управления большим количеством роботов, способных работать как по отдельности,
так и единой командой.
История создания интеллектуальных роботов
В 1948 году английский нейрофизиолог У. Росс Эшби разработал
электромагнитное устройство, моделирующее свойство гомеостазиса и назвал его
«гомеостатом». Это устройство, не делает ничего, кроме непрерывного движения
к равновесию. Гомеостат Эшби имеет большое количество различных состояний, часть
из которых статически устойчива, а часть неустойчива. Если система находится
в неустойчивом состоянии, происходит переключение. Переключения происходят до
тех пор, пока система не найдет одно из устойчивых состояний вблизи среднего
положения. Целеустремленное поведение гомеостата, при котором он находит устойчивое
состояние при самых различных возмущениях, Эшби и назвал свойством ультраустойчивости.
Наибольшую известность приобрели
три “черепашки”, созданные английским биофизиком и нейрофизиологом Г.
Уолтером в 1950 – 1951 гг. Эти устройства представляют собой самодвижущиеся
электромеханические игрушки, способные ползти на свет или от него, обходить
препятствия, заходить в “кормушку” для подзарядки разрядившихся аккумуляторов
и тому подобное. Несмотря на очень простое устройство и аналоговую систему управления,
“черепашки” демонстрируют свойства обучения.
Возникновение интеллекта у роботов связано с развитием
ЭВМ ([Макаров и др., 2003]).
Робот “Шейки” был создан в 1969 году в Стенфордском
исследовательском институте (США) и назывался тогда интегральным роботом или
мобильным автоматом с использованием принципов искусственного интеллекта. Этот
робот состоит из подвижной части, ЭВМ SDS-940 и соответствующего программного
обеспечения.
Робот был создан для изучения процессов управления в сложной
окружающей среде в реальном масштабе времени. Все функции, которые должен выполнять
робот, можно разделить на три класса: решение задачи, восприятие, моделирование.
Система управления робота, осуществляющая решение задач, использует записанную
в модели информацию для планирования и расчёта последовательности действий.
По мере изменения внешней среды активными действиями самого робота или по другим
причинам модель должна преобразоваться с целью запоминания этих изменений. Кроме
того, в модель должна добавляться новая, текущая информация о внешней среде,
которую робот приобретает в процессе её познания.
В1969 г. в Электротехнической лаборатории (Япония) началась
разработка проекта “промышленный интеллектуальный робот”. Цель этой
разработки — создание очуствленного манипуляционного робота с элементами искусственного
интеллекта для выполнения сборочно-монтажных работ с визуальным контролем. Манипулятор
робота имеет шесть степеней свободы и управляется мини-ЭВМ NEAC-3100 (объем
оперативной памяти 32000 слов, объем внешней памяти на магнитных дисках 273000
слов), формирующей требуемое программное движение, которое отрабатывается следящей
электрогидравлической системой. Схват манипулятора оснащен тактильными датчиками.
В качестве системы зрительного восприятия используются две телевизионные камеры,
снабженные красно-зелено-синими фильтрами для распознавания цвета предметов.
Поле зрения телевизионной камеры разбито на 64*64 ячеек. В результате обработки
полученной информации грубо определяется область, занимаемая интересующим робота
предметом. Далее, с целью детального изучения этого предмета выявленная область
вновь делится на 4096 ячеек. В том случае, когда предмет не помещается в выбранное
“окошко “, оно автоматически перемещается, подобно тому, как человек
скользит взглядом по предмету. Робот Электротехнической лаборатории был способен
распознавать простые предметы, ограниченные плоскостями и цилиндрическими поверхностями
при специальном освещении.
В 1972-1975 годах в Киевском Институте кибернетики под
руководством Н. М. Амосова и В. М. Глушкова был создан макет транспортного автономного
интегрального робота (ТАИР). Робот демонстрировал целенаправленное движение
в естественной среде, обход препятствий и т.п. Конструктивно ТАИР представлял
собой трехколесную самоходную тележку, снабженную системой датчиков: оптическим
дальномером, навигационной системой с двумя радиомаяками и компасом, контактными
датчиками, датчиками углов наклона тележки, таймером и др. Особенностью, которая
отличает ТАИР от многих других систем, созданных в СССР и за рубежом, является
отсутствие в его составе компьютера в том виде, к которому мы привыкли. Основу
системы управления составляет аппаратно реализованная нейронная сеть (узлы сети
– специальные электронные схемы, собранные на транзисторах, связи между узлами
– резисторы), на которой реализуются различные алгоритмы обработки сенсорной
информации, планирования поведения и управления движением робота.
Планетоходы являлись важнейшим этапом в создании космических
роботов. В период до 1989 года человечеству было известно три модели планетоходов.
Это советские самоходные исследовательские аппараты “Луноход-1”, “Луноход-2” и американские
типа LRV. Они являются выдающимися образцами инженерного творчества. Опыт их
создания и эксплуатации на Луне дал богатый материал по принципам проектирования,
изготовления многих элементов конструкции и управления.
начали широко внедряться в производственную сферу в семидесятые годы прошлого
столетия. Эти роботы
управлялись автоматически от систем числового программного
управления. Применение элементов адаптации позволило расширить возможности промышленных
роботов.
В настоящее время различные фирмы ABB, STAUBLI, REIS, MOTOMAN,
MITSUBISHI и другие производят промышленных
роботов для манипулирования, сварки, покраски, упаковки, шлифовки,
полировки и т. д. с большим спектром применения и по точности, и по характеру
выполняемых операций.
Основными потребителями в области промышленной робототехники
является автомобильная и электронная промышленность.
– это
уже не фантастика. Defense Advanced Research Projects Agency (DARPA)
является основным исследовательским центром Министерства Обороны США. На сегодня
в рамках этой организации проводится очень амбициозная программа – создание
армии роботов. По оценкам специалистов подготовка робото-армии, состоящей из
воздушных сил и пехоты будет завершена в течение ближайших 10 лет. А к 2023
году DARPA планирует сделать одну треть транспортных средств, состоящих на вооружении
США, беспилотными. Переход к полноценной робототехнической армии должен состояться
к 2025 году. Благодаря внедрению роботов, из военных действий исключается самый
важный фактор – присутствие на поле боя живых солдат. Используя спутниковую
связь, управление такой армией можно вести из любой точки мира. Уже имеются
в наличии беспилотные самолеты, легкое и среднее наземное вооружение. В ближайшем
будущем будет предусмотрен и вариант с тяжелой бронетехникой нового поколения.
Российские роботы-саперы различных производителей уже сегодня
применяются в ФСБ. Роботы могут подрывать заряды, вскрывать автомобили,
проводить анализ содержимого подозрительных свертков. По своей структуре и функциям
такие роботы представляют собой дистанционно управляемые манипуляторы с камерами
наблюдения.
в настоящее время начинают широко использоваться для обеспечения безопасности.
Немецкие компании Robowatch и Diehl BGT Defence разработали ASENDRO –
модульного разведывательного робота, который стоял на страже Чемпионата Мира
по Футболу 2006, что проходил в Германии. Всего, во время Чемпионата Мира, на
Берлинском Олимпийском стадионе единовременно присутствовало минимум 20 таких
машин.
Беспилотные летательные аппараты (БПЛА) за последние годы
начали применяться в США для обеспечения внутренней безопасности страны – от
патрулирования границ, портов, трубопроводов и прочих стратегических объектов
до наблюдения за населением.
становятся
таким же атрибутом домашнего хозяйства, как телевизор или холодильник. Министр
информации Южной Кореи сообщил, что в 2020-м году в каждой корейской семье обязательно
будет иметься робот. По его словам, уже в конце следующего года, цена на роботов
существенно снизится и составит от тысячи до двух тысяч долларов. Цена упадет
благодаря тому, что Корея разрабатывает устройства, в стоимость которых не входит
программное обеспечение. Роботы будут в состоянии постоянно держать связь с
Интернетом и управляться мощными суперкомпьютерами, на которых и будут установлены
необходимые программы.
Корея возлагает большие надежды на производство роботов,
управляемых через Интернет, и надеется стать одним из трех крупнейших их производителей
уже до 2023-го года.
Китай также не намерен отставать от первопроходцев в области
робототехники. Программа научно-конструкторских работ по созданию роботов-слуг
включена в план 11-й пятилетки. Китайской компании “Синьсун” удалось
первой блеснуть двумя образцами таких “помощников по дому”, которые,
возможно, со временем превратятся в привычный атрибут обихода состоятельных
жителей Поднебесной.
До недавнего времени в роботостроении в Японии центральное
место занимали роботы промышленного и медицинского назначения. Однако в последнее
время, по оценкам экспертов, на первый план вышла индустрия по созданию роботов-помощников
человека. В связи с этим, указывают специалисты, в повестку дня входит задача
широкомасштабного исследования проблемы сосуществования человека и робота-помощника,
включая ее психологические и социальные аспекты.
К более активному созданию роботов, способных эффективно
помогать человеку, подталкивает частные компании и институты правительство Японии.
В бюджете Японии в течение ближайших пяти лет на это планируется ассигновать
из государственной казны примерно $100 млн.
появились не так давно, но уже успели стать популярными. В 2000 году корпорация
Sony объявила о создании нового поколения роботов-собак AIBO. К умению прыгать,
бегать, вилять хвостиком, катать мячик и демонстрировать различные чувства –
от страха до щенячьей радости, четвероногий робот добавил способность реагировать
на кличку, которую присваивает ему хозяин, подавать лапу, садиться и бежать
вперед. За шесть лет AIBOзавоевал мировую популярность и стал одним из брэндов компании
SONY. К сожалению, сегодня из-за финансовых проблем разработка новых моделей
AIBO прекращена, а вскоре намечено и вовсе полное прекращение
производства этих роботов.
Южнокорейская компания Dasatech разработала роботизированную
собаку Genibo, продажи которой планируется начать в ближайшее время. Корейский
робопес умеет распознавать голосовые команды и понимает около сотни слов.
становятся неотъемлемой частью современных клиник. Хирургическая система
da Vinci компании Intuitive Surgical представляет собой прецизионный манипулятор
для врачей. Она стоит чуть больше 1 млн долл. и может просверлить кость или
произвести надрез. Эта система точно управляет своими движениями и «видит» трехмерное
изображение, что помогает сделать хирургическую операцию гораздо менее болезненной.
А это, в свою очередь, способствует скорейшему выздоровлению, облегчая и удешевляя
процесс лечения. Сегодня в клиниках применяется 192 системы da Vinci.
В Японии начинают широко использовать домашних роботов
для ухода за больными, а в клиниках США уже применяют машины для доставки регистрационных
карт, раздачи лекарств и даже проведения хирургических операций.
проводят исследование космоса и других планет. Автоматические межпланетные
станции, планетоходы для изучения поверхности планет солнечной системы являются
по сути сложными роботами. Большая задержка распространения радиосигнала практически
исключает телеуправление в реальном времени, поэтому планетоход должен уметь
принимать решения на месте, т.е. обладать свойствами интеллектуального робота.
Для стимулирования развития разработок в области интеллектуальных
роботов были предложены несколько модельных задач. Для мобильных колесных, шагающих,
плавающих и летающих роботов – это задачи ориентации и навигации в пространстве.
Для отработки задач группового управления, методов управления шагающих роботов
международной ассоциацией RoboCup предложена задача игры в футбол.
Гонки беспилотных наземных машин IGVC ([IGVC]) являются ежегодно проводимыми соревнованиями среди студентов
американских университетов с призовым фондом в несколько десятков тысяч долларов.
Цели этих соревнований – создать машины, способные самостоятельно перемещаться
по заданной местности (природному ландшафту), без управления с помощью человека
либо другого живого организма.
8 октября 2005 года состоялись вторые гонки DARPA Grand Challenge ([DARPA]), по правилам которых победитель должен быстрее всех
преодолеть расстояние в 175 миль (примерно 280 км) по бездорожью менее чем за
10 часов. Соревнования проводятся между автономно управляемыми механизмами,
управление человеком либо другим биологическим организмом запрещено. Призовой
фонд составляет $2 млн.
В отличие от первых соревнований, 5 из 23 машин преодолели
весь маршрут и добрались до финиша. Победителем была признан робот Stanley
из Стэнфордского университета. Он пересек финишную прямую через
6 часов 53 минуты после старта. Ещё через 11 минут за ним последовал
условный чемпион прошлого забега -робомобиль Sandstorm из университете
Карнеги-Меллона. Stanley представляет собой модифицированный
Volkswagen Touareg R5 под управлением семи компьютеров на базе Pentium M, оснащённый
GPS, инерционными датчиками, лазерными измерителями дальности, видеокамерами
и системой радаров. Все сенсоры сканируют окружающее пространство с частотой
в 10-100 Гц, что позволяет Stanley в реальном времени обнаруживать и обходить
препятствия.
Анонсировано третье
соревнование автономных автомобилей-роботов “Великий вызов” (Grand
Challenge), на этот раз перенесённое из пустыни в город, и потому сменившее
название на DARPA Urban Challenge. По условиям нового состязания
беспилотные машины, как и в предыдущие два раза — без какого-либо управления
со стороны, должны закончить 97-километровый городской маршрут не более чем
за 6 часов, с соблюдением всех правил дорожного движения. Команда, чья машина
придёт первой, получит $2 миллиона, второй — $500 тысяч и третьей $250
тысяч.
Молодежный фестиваль «Мобильные роботы» ([Мобильные роботы])
проходит ежегодно с 1995 года в Институте Механики МГУ им. Ломоносова. Соревнования
автономных мобильных роботов проводятся на ограниченной ровной горизонтальной
площадке – полигоне. Над полигоном подвешено некоторое количество (10 – 15)
«маяков», имеющих излучатели; если излучатель включен, то маяк является активным.
Маяк оборудован оптическим датчиком, позволяющим автоматически фиксировать момент
прохождения под ним отражающего диска робота. На полигоне нанесена также полоса–трасса,
образованная отрезками прямых и дуг окружностей. В регламент соревнований входят
задания по навигации роботов по маякам, отслеживанию полосы с преодолением препятствий.
Для отработки задач группового управления, методов управления
шагающих роботов международной ассоциацией RoboCup ([RoboCup]) предложена задача игры в футбол. В RoboCup заявлен
следующий манифест: “Через 50 лет, в 2050 году, команда роботов-футболистов
должна выиграть у Чемпиона мира по футболу (команды людей-футболистов)”.
В свое время задача научить играть компьютер в шахматы
послужило мощным толчком для развития науки. Игра в футбол является более сложной
задачей ([Охоцимский и др., 2000]), поскольку протекает в реальном времени на
игровом поле с быстроменяющейся обстановкой. В настоящее время предложен ряд
различных схем организации соревнований роботов-футболистов, например схемы
соревнований Ассоциации RoboCup, или схемы, принятые в Международной Федерации
FIRA ([Fira]). Одним из видов соревнований является
виртуальный футбол, когда на компьютере моделируется игровая среда, движение
мяча и действия игроков. Виртуальный футбол является хорошим полигоном для отработки
задач коллективного поведения и использования многоагентных систем.
Для популяризации робототехники во многих странах ежегодно
проводятся национальные чемпионаты по боям роботов. Для участия в этих соревнованиях
создаются радиоуправляемые или автономные роботы. С середины 1990-х американская
компания BattleBots Inc проводит соревнования, собирающие на своих площадках
более тысячи участников и десятки тысяч зрителей. Чемпионаты транслируются по
телевидению и в Интернете. Eurobot – крупнейшие ежегодные соревнования роботов
в Европе. Каждый год в них принимают участие сотни команд. В этом году турнир
Eurobot пройдет с 1 по 3 Июня в Катании, Сицилия. Соревнования роботов по борьбе
сумо проходят в Японии и США. Считается, что подобные соревнования позволяют
превратить изучение сложной техники в увлекательную игру.
На сегодняшний день интеллектуальные роботы вышли из области
чисто научных разработок и становятся такими же необходимыми элементами повседневной
жизни, как телевидение и сотовая связь.
Однако, чтобы вызвать полноценный бум, необходимо преодолеть
некоторые ключевые проблемы. Остаются задачи коммуникации и координации. Требует
проработки и механизм захвата.
И все же способности роботов быстро развиваются. Согласно
исследованиям, 1.5-кг мозг человека может выполнять около 100 трлн операций
в секунду — почти втрое больше, чем самый мощный в мире компьютер Earth Simulator.
Развиваясь по закону Мура, машины могут достичь такой обрабатывающей мощности.
Однако, чтобы быть достаточно полезным, роботу не нужны все возможности человеческого
мозга. Умственных способностей рыбки гуппи примерно в 1000 млн операций в секунду
вполне достаточно, чтобы мобильные бытовые роботы могли уверенно ориентироваться
в незнакомом окружении. Даже лишенные человеческого разума, роботы-андроиды
займут часть рынка. Sony, Honda и некоторые другие японские компании предлагают
роботов-компаньонов.
О масштабах происходящих перемен дают данные об объемах
продаж. По подсчетам экспертов, объем рынка “бытовых роботов” в Японии
в прошлом году составил 390 млрд. иен ($3,2 млрд.), а к 2025 году достигнет
годового объема в 8 трлн. иен ($70 млрд.).
В этом году рынок персональных и мобильных роботов должен
вырасти до 5,4 млрд долл. и стать крупнее рынка промышленных стационарных роботов,
утверждает Дэн Кара, президент фирмы Robotics Trends, которая
организует конференции и пропагандирует отрасль. К 2023 году, по словам Кара,
эта цифра приблизится к 17 млрд долл. Пусть некоторые считают эти оценки слишком
оптимистичными, но у Кара есть наглядные свидетельства наступления лихорадки
роботизации. В прошлом году выставка Robodex в Японии собрала около 68 тыс.
посетителей, да и объемы продаж Roomba и da Vinci говорят сами за себя.
Сегодня мы живем в стремительно изменяющемся мире, неотъемлемой
частью которого будут роботы, обладающие искусственным интеллектом. Мы не можем
остановить эти изменения, но в наших силах направить их для улучшения жизни
человека.
Список литературы
[Макаров и др., 2003] Макаров И.М., Топчиев Ю.И.
Робототехника: история и перспективы.-М.: Наука, Издательство МАИ, 2003.
[Мобильные роботы] Фестиваль “Мобильные роботы”
в МГУ. http:// www.robot.ru
[Охоцимский и др., 2000] Охоцимский Д.Е., Павловский
В.Е., Плахов А.Г., Туганов А.Н.. Моделирование игры роботов-футболистов и базовые
алгоритмы управления ими. // Искусственный интеллект, N 3, 2000.
[Поспелов, 1988] Поспелов Г.С. Искусственный интеллект
– основа новой информационной технологии. -М.:Наука, 1988.
[Попов и др., 1976] Попов Э.В., Фридман Г.Р. Алгоритмические
основы
интеллектуальных роботов и искусственного интеллекта, М: Наука, 1976.
[Попов и др., 1990] Попов Е.П., Письменный Г.В.
Основы робототехники: Введение в специальность. М.:Высш.шк., 1990.
[Финн, 2004a] Финн
В.К. Искусственный интеллект: Идейная база и основной продукт, 9-я национальная
конференция по искусственному интеллекту, Труды конференции, Т.1, М., Физматлит,
2004.
[Финн, 2004b] Финн
В.К. Об интеллектуальном анализе данных //Новости искусственного интеллекта
№3, 2004.
[DARPA] DARPA official materials. http://www.darpa.mil
[Fira] FIRA official materials. http://
www.fira.net
[IGVC] IGVC official materials. http://www.igvc.org
[RoboCup] RoboCup Federation. Official materials. http://
www.robocup.org
1 125190, Москва, ул. Усиевича, д. 20, ВИНИТИ РАН, dobr@viniti.ru

 (LiPo) - 94182PRO")





