

Gps-модуль 6m
Спутники ловятся очень медленно, зачастую от 5 минут и дольше, однако если поймал, то показывает местоположение достаточно точно. От подключения телеметрии показания спутников не зависят. Даже не помню, удалось ли мне летать в Loiter на этом модуле, но теперь обязательно попробую!
Gps-модуль ublox neo 7m
При подаче питания этот модуль вообще не ловил спутники, а ждал я долго, минут 20. НО! Стоило мне только подключить контроллер квадрокоптера (используя телеметрию) к компьютеру или смартфону (обязательно подключенному к интернету), как спутники появлялись буквально моментально!
Сразу же появлялся 2D-Fix и 3D-Fix! Если коптер стоял не под открытым небом а на подоконнике, на это уходило несколько секунд. Показатель же HDOP реально зависел от погоды. При чистом небе он позволял летать почти сразу (иногда достигал 1.2), при пасмурной — приходил в норму в пределах пары минут.
Напомню, стандартные предполётные проверки запрещают запуск двигателя в режиме Loiter (по GPS-сигналам) если показатель HDOP превышает 2.0.
Таким образом, в последнее время каждый мой выход в поле для полётов выглядел примерно так:
- Подаю питание на квадрокоптер (в том числе на полётный контроллер)
- Достаю смартфон, подключаю радиотелеметрию, запускаю Tower, любуюсь показаниями спутников.
- Отключаю смартфон (чтобы не мешал) и взлетаю в Loiter, либо программирую и загружаю миссию в том же приложении Tower на смартфоне.
Внешний компас – apm copter team
Случается, что поведение коптера на контроллере APM не всегда бывает хорошим. Это проявляется в режимах, использующих компас. Причиной является наводка от силовых проводов питания и моторов. Влияние можно исключить, если использовать внешний компас.
Использование внешнего компаса упрощает задачу расположения силовых проводов на борту коптера. Внешний компас может быть как отдельный, так и совмещен с модулем GPS. Большинство пилотов ставят совмещенную плату. Для GPS модуля это тоже плюс, т.к. при выносе его положение становится выше всех других компонентов коптера, что уменьшает помехи. О модулях GPS с компасом на плате писал ранее в статье «Использование модуля GPS». Как ориентировать внешний компас — написано в статье «Внешний компас. Как расположить». Далее останется только разобраться, как производится подключение к контроллеру APM.
Один из примеров установки внешнего компаса можно почитать в дневнике Александра Шанталова. Вот как получилось у него:

Аналогичное решение есть еще на буржуйском форуме:

Вот так получилось у Александра Киселева:

Теперь мы имеет представление, что должно получиться. Далее разберемся с подключением.
В подключении ничего сложного нет. Стоит только понять разницу между платой APM версии 2.5.2 и 2.6. На плате 2.5.2 компас обычно запаян, а на плате 2.6 микросхемы нет (но китайцы плату могут назвать как угодно, поэтому смотрим на наличие/отсутствие компаса).
Если у вас плата с запаянным компасом, то его необходимо отключить. Отключение производится перерезанием шейки между прямоугольными площадками. Если плата без запаянного компаса, то можно ничего не делать.

Производим подключение согласно схеме:

Нельзя, чтобы провода были слишком длинными, т.к. может наблюдаться проблема зависания шины I2C. Рекомендуется делать провод не больше 20см. Дальше крепим внешний компас (или совмещенную плату с модулем GPS) в удобном месте и ориентируем по осям как можно точнее! Про правильную ориентацию компаса написано в статье «Внешний компас. Как расположить». Проще всего его расположить также, как он расположен на плате APM 2.5.2 (см. ссылку выше).
Update 28.04.2023. Информация от Тимура.
Хотя модуль физически и один, сенсора там два.
Один сенсор — это определение координат. Это антенна спутникового модуля с чипом Ublox (или что там у вас стоит). По нему коптер знает где он находится (спутниковые координаты). Этот сенсор — как ни вращай — координаты будут определяться. Лучше или хуже (точнее или быстрее/медленнее) — но будет, хоть антенной вниз.
А вот в какую сторону лететь — это коптер будет знать при условии корректно работающего компаса, который часто расположен на том же модуле, даже запаян на одной плате. Но суть — отдельный сенсор, который чувствителен к правильной установке.
А вариантов разводки платы и размещения микросхемы компаса на ней — существует превеликое множество и ограничено только китайской фантазией. И однозначно утверждать как правильно ставить модуль можно только когда увидишь микросхему компаса на модуле.
Проверить без разборки просто. Вы же знаете, где у вас какая сторона света? Поставьте коптер мордой например на восток и включите коптер, соедините его с МП. В МП дожно показать именно на восток, а не на север. Стороны света могут «крутиться» благодаря показаниям акселерометра, но коптер при включении ВСЕГДА показывает на север, если у него не работает компас.
Если вы нашли ошибку на странице, то нажмите Shift Enter или нажмите здесь, чтобы уведомить нас.
Глава 7. обслуживание и ремонт квадрокоптера . твой первый квадрокоптер: теория и практика
Предполетная проверка
Даже если не было аварий в предыдущие полетные дни, квадрокоптер может получить мелкие повреждения при транспортировке в автомобиле и просто вследствие естественного износа при эксплуатации. Перед полетом необходимо проверить, не повреждены ли антенны и их соединительные кабели, надежно ли подключены разъемы к приемнику и полетному контроллеру. Убедитесь, не деформированы ли воздушные винты при хранении и транспортировке, надежно ли они закреплены.
Характерные неполадки
Обсудим некоторые характерные неполадки, которые не проявляются при настройке, либо не присутствуют постоянно, однако внезапно возникают при эксплуатации. Такие пропадающие неполадки бывает сложно выявить, поскольку они пропадают так же непредсказуемо, как и возникают. Но на самом деле причины большинства из таких неполадок в авиамодельном сообществе хорошо известны. Поэтому начинать поиск лучше с очевидных причин и лишь затем углубляться в экзотику наподобие микротрещин печатной платы контроллера.
Квадрокоптер изредка внезапно дергается по курсовому направлению и уровню, при этом в момент рывка слышен перепад звука вращения моторов.
Вероятные причины:
• плохой контакт в разъемном соединении типа “тюльпан” между мотором и регулятором или между регулятором и распределителем питания. Следует отказаться от разъемных соединений и использовать только пайку;
• бракованный регулятор оборотов, с непропаем на плате. Попробуйте поочередно заменять регуляторы запасным;
• высокий уровень помех в цепи питания полетного контроллера. Попробуйте питать контроллер от отдельного источника питания.
Квадрокоптер внезапно рывком теряет ориентацию в пространстве и терпит аварию во время ровного полета или висения, при этом моторы могут включиться на максимальные обороты или отключиться.
Вероятная причина: сниженное напряжение питания полетного контроллера. При этом происходит либо перезагрузка контроллера, либо сбой шины I2С с передачей хаотичных данных от акселерометра и гироскопа. Следует увеличить напряжение питания до 5,2–5,3 В.
Квадрокоптер внезапно на некоторое время перестает слушаться команд управления, затем прием команд восстанавливается.
Вероятные причины:
• недалеко от зоны полетов включается мощный источник помех (охранная сигнализация, радиостанция и т. д.);
• коптер попадает в створ луча радиосигнала релейной станции или радиоудлинителя интернет-канала;
• поврежден провод антенны приемника, и он периодически теряет сигнал;
• находящийся в кармане мобильный телефон при служебном обмене с базовой станцией создает наводки на плату пульта управления;
• предгрозовая погода с высоким уровнем электростатических помех.
Постарайтесь внимательно изучить окрестности на предмет наличия потенциальных источников помех. Мобильный телефон во время полета старайтесь держать на расстоянии не менее метра от пульта. Проверьте надежность соединения антенны с платой приемника и убедитесь в отсутствии механических повреждений антенного кабеля и самой антенны.
В режиме удержания высоты квадрокоптер внезапно совершает девиации по высоте порядка двух метров вверх и вниз.
Вероятные причины:
• барометр не защищен от завихрений воздуха при помощи кусочка поролона или чехла для полетного контроллера;
• прямые солнечные лучи попадают на сенсор барометра через отверстия в корпусе;
• высокая нестабильность плотности воздуха и давления перед грозой.
При резком наборе высоты или энергичных маневрах коптер плавно закручивается по курсу или дергается по крену.
Вероятные причины:
• сильные магнитные наводки на компас;
• срабатывает отсечка регулятора оборотов при перегрузке регуляторов по току;
• просадка напряжения силовой батареи при пиковой нагрузке;
• пропуск фаз вращения одного из моторов при пиковой нагрузке.
Прежде всего, следует проверить реакцию компаса на максимальный ток в силовых цепях. Процедура проверки потребует большой осторожности и аккуратности. Необходимо надежно зафиксировать коптер так, чтобы он не взлетел при максимальной тяге. Для наблюдения за показаниями компаса желательно использовать беспроводное соединение. Если при максимальной тяге показания компаса изменяются больше, чем на 8-10 градусов, то необходимо принять меры для уменьшения магнитных наводок: укоротить и уложить по-другому силовые провода, изменить расположение батареи, поднять компас вверх на выносной плате. В случае, если под максимальной нагрузкой моторы начинают хрипеть и вращаться неравномерно, нужно использовать воздушные винты меньшего диаметра и/или шага. Возможно, придется провести повторный расчет силовой установки в онлайн-калькуляторе.
Ремонт квадрокоптера после аварии
Примечание
Первое, что нужно сделать при серьезной аварии, — деактивировать моторы и отключить силовую батарею и батарею видеопередатчика.
Динамические перегрузки, возникающие при ударе квадрокоптера о землю или окружающие предметы, иногда проявляют себя весьма парадоксально, в неожиданных местах конструкции. Например, простое падение коптера с работающими моторами с высоты 3 м может привести к изгибу валов двух моторов, порче трех пропеллеров и трещине рамы. Поэтому даже небольшая авария требует вашего пристального внимания!
Осмотр и поиск дефектов
Если удар о землю или поверхность был не слишком сильным (жесткая посадка, падение с небольшой высоты), то можно ограничиться внешним осмотром наиболее часто страдающих элементов: посадочных стоек шасси, антенн, пропеллеров, крепления камеры, нейлоновых элементов крепежа. Обратите особое внимание на воздушные винты. При кажущейся исправности у них может появиться деформация лопастей, приводящая к расхождению плоскостей вращения (так называемая “бабочка”), или трещина бобышки винта. Второй дефект очень опасен, т. к. слабо заметен визуально, однако на больших оборотах приводит к сильной вибрации с возможностью отстрела лопастей и травмирования окружающих. Убедитесь, что внутри моторов не остались песок или трава, и они вращаются легко и все одинаково.
Если дефекты, влияющие на безопасный полет, не выявлены, попробуйте поднять коптер в воздух, осторожно добавляя обороты. Внимательно следите за звуком работы моторов и поведением коптера. При появлении вибрации, необычных звуков или странном поведении коптера немедленно прекратите полет. Скорее всего, от удара лопастями винта о землю появился изгиб вала мотора. Этот изгиб редко заметен визуально, однако приводит к сильной вибрации. Вообще, при использовании высокопрофильных моторов с длинным валом последствия удара винтом о землю непредсказуемы. Вал может остаться целым при разрушении винта и, наоборот, погнуться при неповрежденном винте. В случае специальных низкопрофильных моторов с коротким толстым валом обычно страдают только винты.
После аварии с очевидными повреждениями конструкции начинайте проверку и ремонт по принципу “снаружи — внутрь”. Снимите уцелевшие винты и проверьте их геометрию. Вращая моторы, проверьте их на визуально заметный изгиб валов.
Если изгиб не просматривается, оставьте окончательную проверку на потом. Прикладывая усилия к лучам, проверьте детали рамы на наличие скрытых трещин. Обратите внимание на сохранность нейлоновых винтов и монтажных стоек. Они могут продолжать удерживаться на месте, но при этом быть срезанными по резьбовой части, либо иметь сорванную резьбу.
При помощи увеличительного стекла тщательно осмотрите керамическую антенну приемника GPS. Даже если приемник помещен в пластиковый корпус, при ударе о камень или асфальт антенна может треснуть. Такая трещина иногда почти незаметна невооруженным глазом, но приводит к значительному ухудшению качества приема спутников. Ремонт керамической антенны невозможен, склеивание бесполезно. Поврежденную антенну можно только заменить.
Проверьте исправность и надежность подключения антенны приемника. Иногда антенный кабель внутри приемника не припаян, а присоединяется к плате миниатюрным разъемом типа “грибок”. После удара и рывка за кабель “грибок” может частично соскочить с ответной части. Это существенно снижает дальность действия и стабильность работы приемника.
Проверьте исправность и надежность подключения прочих разъемов и проводов.
На этом стандартные проверки можно считать оконченными и приступать к ремонту и замене механических частей конструкции. Специфические повреждения, типа трещины платы полетного контроллера, случаются крайне редко. Если плата контроллера смонтирована правильно, на защитных нейлоновых стойках или амортизаторах, то обычно остается исправной даже при очень серьезных авариях.
Ремонт двигателей
Поскольку двигатели расположены на концах лучей и являются точным механическим устройством, они наиболее подвержены различным повреждениям при аварии. К обычным повреждениям относятся:
• изгиб вала;
• повреждение подшипников;
• обрыв вывода обмотки;
• отрыв магнита от корпуса ротора и/или трещина магнита.
При ремонте двигателей могут быть допущены ошибки, приводящие к повреждению двигателя или ухудшению его свойств, поэтому рассмотрим процесс ремонта более подробно.
Разборка двигателя
Для разборки двигателя вам понадобятся: тиски, пассатижи с длинными губками, иголка, качественный шестигранный ключ нужного размера и инструмент для локального нагрева. Это может быть фен паяльной станции, миниатюрная газовая горелка или зажигалка.
Используя пассатижи и иголку, аккуратно удалите стопорный замок с вала двигателя, как показано на рис. 7.1, и снимите с вала ротор с магнитами. На вал могут быть надеты бронзовые шайбы и втулки, иногда с двух сторон. Не потеряйте их и запомните, где они находились.
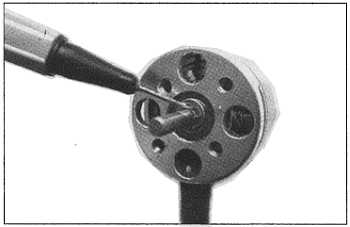
Рис. 7.1.Удаление замка для разборки двигателя
Теперь при помощи шестигранного ключа нужно вывинтить стопорные винты, фиксирующие вал в роторе (рис. 7.2).
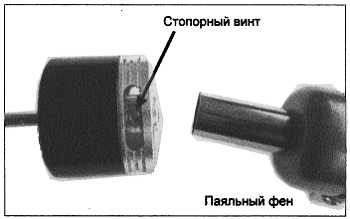
Рис. 7.2.Удаление стопорных винтов
Это очень ответственный момент, т. к. шестигранное гнездо головки винта можно очень легко испортить, после чего дальнейший ремонт двигателя будет очень сложен или невозможен. Не экономьте на шестигранных ключах, используйте только качественные, хорошо закаленные ключи! Винты обычно бывают посажены на фиксатор резьбы, который размягчается при нагреве до 80-120 °C. Хорошо прогрейте место посадки винтов при помощи фена или горелки и только после этого приступайте к вывинчиванию винтов. Не прилагайте чрезмерные усилия, чтобы не сорвать насечку винта или ключа. Лучше прогрейте резьбу еще раз. Винты следует вывинтить полностью, т. к. понадобится очистить резьбу и нанести на нее свежий фиксатор.
Во многих моторах вал имеет очень прочную “нулевую” посадку в гнездо и не вынимается даже после удаления стопорных винтов. Кроме того, вал иногда может быть также посажен на фиксирующую жидкость. Ни в коем случае не пытайтесь выбить его из отверстия ротора! Вообще избегайте любых ударов по ротору, чтобы не повредить магниты. Зажмите конец вала длиной около 5 мм в тиски и осторожно, но сильно начните проворачивать статор на валу, избегая прикладывать боковое усилие, чтобы не погнуть вал, если он вдруг не испорчен. Если провернуть вал в гнезде не удается, еще раз хорошо прогрейте посадочное место и вращайте вал, пока оно горячее. Постепенно стяните ротор с вала, совершая колебательное вращение.
Проверка и замена вала
Если вы не уверены, погнут ли вал, нужно его проверить. В быту доступны два несложных способа. Можно катать вал по гладкому стеклу, слегка прижимая пальцами. Ровный вал катается плавно, неоднородности при перекатывании не ощущаются. Подойдет поверхность зеркала или мебельного стекла. Обычное оконное стекло может иметь неровности. Во втором способе вал прикладывают к образцово ровной поверхности и смотрят зазор на свет. Можно прикладывать вал к стальной линейке.
На рис. 7.3 видно, что вал слегка изогнут в области проточки для стопорного кольца. Обычно это самое слабое место вала. Проворачивая вал вокруг оси, нужно убедиться, что он в любом положении прилегает к поверхности без зазора по всей длине. Если обнаружен хотя бы незначительный изгиб, то вал следует заменить новым.
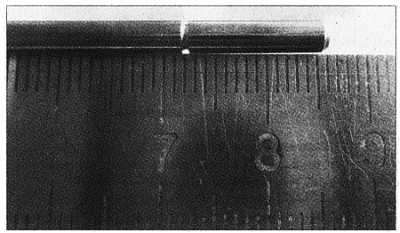
Рис. 7.3.Обнаружение изгиба вала
В безвыходных ситуациях можно попытаться выправить вал (рис. 7.4).
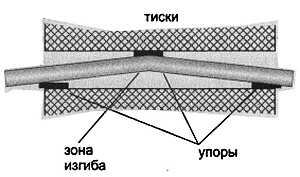
Рис. 7.4.Устранение изгиба вала
Для этого пометьте маркером выступающую сторону изгиба на валу. Зажимая вал в тисках через проставки из сложенной в несколько слоев фольги, исправьте изгиб вала.
Проставки нужны для того, чтобы скомпенсировать упругость вала, слегка выгибая его в противоположную сторону. Если просто зажать вал в тисках, он спружинит и не выпрямится до конца. Возможно, операцию придется повторить несколько раз, контролируя результат. Идеально выправить вал в домашних условиях вряд ли получится, поэтому при первой же возможности его следует заменить.
Очистите резьбу в гнездах под фиксирующие винты от остатков фиксатора резьбы при помощи метчика нужного размера. Желательно также очистить и сами винты, вворачивая их в плашку для нарезания резьбы или, хотя бы, в новую гайку. Зафиксировав кончик вала в тисках, осторожно наденьте на него статор, совершая вращательные движения, аналогично тому, как вынимали вал. Обратите внимание: если на валу есть шлиц, проверните вал так, чтобы шлиц оказался напротив одного из винтов. Слегка увлажнив резьбу винтов фиксатором синего или красного цвета, плотно вверните их на место.
Проверка и замена подшипников
При ударе воздушного винта о препятствие и изгибе вала часто страдают миниатюрные шарикоподшипники. Дело в том, что при боковом ударе по валу шарики “впечатываются” в рабочую поверхность обоймы, создавая в ней вмятины, так называемые питчи. Подшипник начинает гудеть, увеличивается сопротивление вращению. Эффективность двигателя с гудящим подшипником снижается на 15–20 %. Это, в свою очередь, приводит к закручиванию коптера по оси направления и несимметричной отработке кренов, а также к более быстрому разряду батареи.
Кроме того, подшипники начинают гудеть вследствие попадания в них воды, а также естественного износа. Иногда достаточно одного сезона интенсивных полетов, чтобы подшипники потребовали замену даже без аварий. Гудящий подшипник легко обнаруживается при сравнении вращения валов разных двигателей от руки.
При исправных подшипниках во время вращения вала ощущаются только толчки от взаимодействия магнитов ротора с железом статора. В случае неисправного подшипника ощущается высокочастотная вибрация в такт качению шариков. Чтобы эффект ощущался сильнее, рекомендуется при вращении вала пальцами слегка прижимать его вбок. Во время полета двигатель с неисправным подшипником издает специфический неприятный скрипяще-гудящий звук и нагревается сильнее остальных.
Разумеется, неисправный подшипник можно только заменить. При аварии обычно страдает один подшипник, расположенный ближе к воздушному винту. При обычной эксплуатации он также быстрее изнашивается. В двигателях может использоваться как пара одинаковых подшипников, так и подшипники с разным диаметром внешней обоймы. Этот нюанс надо иметь в виду при покупке запасных подшипников.
Специального инструмента для удаления подшипников из посадочных гнезд у любителей обычно не бывает. Иногда подшипники посажены в своем ложе не слишком прочно, и их удается вытащить при помощи зацепов из стальной проволоки.
Если же подшипник посажен очень прочно, можно выбить его при помощи стального стержня диаметром меньше, чем толщина вала. Вставьте стержень с противоположной стороны, слегка под углом, чтобы он уперся в обойму подшипника. Удерживая статор в руке и осторожно постукивая по стержню, выбейте подшипник. После этого он испортится окончательно, поэтому никогда не выбивайте исправные подшипники.
Чистка и смазка подшипников
Иногда, при полетах в дождливую погоду или после падения коптера в воду, внутрь подшипников может попасть вода. Обычно во время полета двигатель нагревается до 40–60 °C. Когда двигатель остывает, вода всасывается внутрь подшипника. Не рекомендуется включать моторы и продолжать полет после попадания воды. Влага опасна не только тем, что может вызвать коррозию подшипника. Есть еще два негативных эффекта от попадания внутрь подшипника любой жидкости, не только воды.
Во-первых, жидкость выдавливает из подшипника специальную консистентную смазку, после чего у рабочих поверхностей начинается масляное голодание и быстрый износ. Во-вторых, при быстром вращении вала со скоростью несколько тысяч оборотов в минуту, при прокатывании шариков внутри обоймы подшипника, наполненного водой, возникает кавитация и микроскопические гидроудары, которые приводят к нарушению целостности зеркала рабочей поверхности качения. Как только зеркало нарушено, износ подшипника резко ускоряется и последующая чистка и смазка помогает мало.
Сказанное выше объясняет, почему не рекомендуется использовать для промывки подшипников и чистки двигателя популярную жидкость WD-40. Состав этой жидкости подобран таким образом, чтобы обеспечить максимальное проникание в любые, даже микроскопические зазоры и трещины. Жидкость WD-40 не только полностью заполняет подшипник, растворяя смазку. Она проникает в микротрещины зеркала обоймы и при скоростном вращении возникают гидроудары, сшелушивающие поверхностный слой и вызывающие появление каверн.
Для очистки двигателя от грязи лучше применять механическую очистку и продувание сжатым воздухом. Подшипники после попадания в них влаги рекомендуется выварить в консистентной смазке. Лучше всего подойдет специальная вязкая полимерная смазка для скоростных подшипников, но можно использовать обычный “Циатим” или “Литол”. В небольшой жестяной емкости нагрейте смазку до температуры 110–120 °C и пять-десять минут выдержите в ней подшипники, чтобы влага выпарилась из подшипников. Затем дайте им остыть, находясь в смазке. В процессе остывания смазка, еще остающаяся жидкой, втянется в пустоты закрытой обоймы. Подшипники не смазывают жидким моторным маслом, т. к. при нагреве и больших оборотах оно быстро покидает обойму подшипника.
Квадрокоптер болтает при взлете. проблемы с компасом?
Только что собрал свой первый квадрокоптер, поставил контроллер Crius AIOP v2 с последней MultiWii. Вроде все настроил, подключил питание, проверил направление вращения винтов, правильные ли винты вращаются, но как только коптер оторвался от земли, его начало болтать из стороны в сторону и он, естественно, упал. Пробовал перезапускать, все то же самое. В утилите для настройки MultiWii заметил странности в работе компаса и барометра. Показания барометра немного скачут (это, наверное, нормально). Показания компаса ведут себя странно. Если квадрокоптер перемещается медленно, то все нормально, но как только он начинает перемещаться чуть быстрее, начинаются проблемы. Компас показывает не туда и начинает подозрительно вращаться. Гироскоп и акселерометр работают идеально. Может отключить внутренний компас и потом поставить внешний? Заранее спасибо за ответ.
Компас, встроенный в gps 6m
Уж и не помню точно, почему я отказался от использования этого компаса, возможно из-за медленного старта приёмника GPS. Но вероятнее всего — из-за невозможности скалибровать компас. Подробнее эти симптомы я опишу в следующем разделе, где речь пойдёт от Neo 7M.
Однако, удивляет тот факт что пару дней назад я достал из шкафа свой старый GPS 6M, подключил его к лежащему там же APM 2.6 и он позволил без проблем провести правильную калибровку! Оси вращались правильно, данные поступали быстро и равномерно! Либо я совсем без головы подключал те же компоненты первый раз, либо от долгого лежания в шкафу компас избавился от излишней намагниченности!
Сейчас я установил именно этот модуль на свой действующий квадрокоптер, откалибровал и проверил на подоконнике, но пока не смог испытать его в полёте из-за неподходящей погоды.
Компас, встроенный в ublox neo 7m
Этот компас подключается, определяется, но при попытке калибровки рисует линии совсем не у тех осей вокруг которых происходит вращение! Попытки подобрать значение углов поворота модуля тоже ни к чему не привели (были опробованы ВСЕ доступные варианты ориентации, кратные 90 градусам по всем трём осям вращения).
В результате мой коптер долгое время летал именно на этом модуле GPS но с отключенным проводом компаса. Я пробовал даже перешить этот модуль (залить в него новый конфигурационный файл), но потом я подумал, что этот вариант и не мог помочь, так как Компас и GPS хоть и живут в одном корпусе и питание получают совместно, но это всё-таки разные устройства.
Кстати, перешивать его нужно либо при помощи специального адаптера, преобразующего USB порт в COM, либо используя полётный контроллер в качестве программатора. Во втором случае прошивка контроллера слетает и нужно потом опять её восстановить при помощи Mission Planner.
Единственный не проверенный мною метод — это выполнить процедуру размагничивания всего модуля, но пока я не могу это сделать ввиду отсутствия нужного оборудования.
Планы на будущее:
- Опустить полётный контроллер на уровень рамы квадрокоптера
- Размагнитить модуль GPS Компас UBLOX Neo-7M
- Заказать модуль GPS Компас UBLOX NEO N8M
Подключайтесь к обсуждению, друзья! Буду рад любым советам!
Выводы:
| 6M | 7M | APM 2.8 | |
| Компас | работает | не калибруется | работает, но требует поднятия модуля над рамой |
| GPS | Медленно ловит спутники | Ловит быстро, но только при подключении к интернету через телеметрию | Встроеный модуль отсутствует |