

- Микроконтроллеры pic для начинающих: схемы, программирование
- Pic 12f629 / 12f675. мигающий светодиод
- Восстановление osscal для 12f629 & 12f675
- Мой самодельный ветрогенератор на шаговом двигателе | мои увлекательные и опасные эксперименты
- Схема шагового двигателя
- Управление шаговым двигателем с помощью микроконтроллера pic16f84 |
Микроконтроллеры pic для начинающих: схемы, программирование
На современном рынке есть ряд семейств и серий микроконтроллеров от разных производителей, среди них можно выделить AVR, STM32 и PIC. Каждое из семейств нашло свою сферу применения. В этой статье я расскажу начинающим о микроконтроллерах PIC, а именно, что это такое и что нужно знать для начала работы с ними.
Что такое PIC
PIC – это название серии микроконтроллеров, которые производятся компанией Microchip Technology Inc (США). Название PIC происходит от Peripheral Interface Controller.
Микроконтроллеры PIC имеют RISC-архитектуру. RISC – сокращённый набор команд, используется также в процессорах для мобильных устройств. Есть целый ряд примеров её использования: ARM, Atmel AVR и другие.
Компания Microchip в 2023 году купила Atmel – производителя контроллеров AVR. Поэтому на официальном сайте представлены микроконтроллеры семейства и PIC и AVR.
Семейства
Среди 8-битных микроконтроллеров PIC она состоит из 3-х семейств, которые отличаются архитектурой (разрядностью и набором команд).
Baseline (PIC10F2xx, PIC12F5xx, PIC16F5x, PIC16F5xx);
Mid-range (PIC10F3xx, PIC12F6xx, PIC12F7xx, PIC16F6xx, PIC16F7xx, PIC16F8xx, PIC16F9xx);
Enhanced Mid-range (PIC12F1xxx, PIC16F1xxx);
High-end или PIC18 (18Fxxxx, 18FxxJxx and 18FxxKxx).
Характеристики, которых приведены в таблице ниже.
Кроме 8 битных микроконтроллеров компания Microchip производит 16-битные:
PIC24F;
DsPIC30/33F для обработки сигналов.
Представители 16-битного семейства работают со скоростью от 16 до 100 MIPS (выполнено миллионов инструкций в секунду). Стоит отметить и особенности:
машинный цикл – 2 такта;
разрядность АЦП – 16 бит;
поддерживают ряд протоколов связи (UART, IrDA, SPI, I2S™, I2C, USB, CAN, LIN and SENT), ШИМ и прочее.
Также есть семейство 32 битных микроконтроллеров – PIC32MX, основные особенности:
работают на частоте до 120 мГц;
выполняют до 150 MIPS;
АЦП: 10-бит, 1 Msps (скорость квантования), до 48 каналов.
С какого PIC начать?
Новичкам стоит начать осваивать микроконтроллеры PIC с 8-битной линейки. Вообще, производитель заявляет о том, что особенностью всего семейства является лёгкая переносимость программ с одного семейства на другое и совпадения цоколевки ряда моделей.
Одним из популярнейших в среде радиолюбителей микроконтроллеров является PIC16f628A. Его технические характеристики такие:
Есть встроенный тактовый генератор. Вы можете настроить для работы с частотой 4 или 8 МГц;
18 пинов, из них 16 – ввод/вывод, а 2 – питание;
Для работы на частотах до 20 МГц можно подключить кварцевый резонатор, но в этом случае на ввод/вывод останется не 16, а 14 ног;
В маркировке есть буква F, это значит, что используется FLASH-память, объёмом в 2048 слов;
14-битные инструкции, 35 штук;
2 компаратора;
4 аналоговых входа;
На входах PORTB есть подтягивающие резисторы;
Два 8-битных таймера и один 16-битный;
Машинный цикл – 4 такта кварцевого резонатора или внутреннего генератора);
224 байта ОЗУ;
128 байт EEPROM;
USART – последовательный порт;
внутренний источник опорного напряжения;
питается от 3.3 до 5 В.
Причинами популярности является низкая цена и возможность тактирования от внутреннего генератора.
Какая цоколевка у 16f628 изображено ниже:
Блочная внутренняя схема этого микроконтроллера изображена ниже.
Научитесь разрабатывать устройства на базе микроконтроллеров и станьте инженером умных устройств с нуля: Инженер умных устройств
На что следует обратить внимание на схеме в первую очередь?
У этого микроконтроллера есть два порта PORTA и PORTB. Каждый пин, каждого из них может использоваться как вход и выход, а также для подключения периферии или задействования других модулей микроконтроллера.
Рассмотрим эту часть схемы крупно.
Например, порты RB0-RB3 – могут выступать в роли аналоговых. К RA6, RA7 в случае необходимости подключается источник тактирования (кварцевый резонатор). Сами же выводы микроконтроллера настраиваются в режим входа/выхода с помощью регистра TRIS.
Для этого есть команды типа:
TRISA = 0; // Все выводы порта А устанавливаются как выходы
TRISB = 0xff; // Все выводы порта B назначаются как входы
TRISA0 = 1; // Так назначается отдельный пин как вход (1) или выход (0)
TRISA5 = 1; // здесь 5 вывод порта А – назначен входом
Вообще режимы работы, включение WDT (сторожевого таймера) выбор источника тактирования микроконтроллера и прочее настраивается с помощью регистров специального назначения — SFR, а память и данные хранятся в GFR – простыми словами это статическое ОЗУ.
В официальном Datasheet, на страницах 18-21 вы найдете 4 банка памяти регистров специального назначения SFR и регистров общего назначения GFR. Знание регистров важно, поэтому распечатайте и выучите указанные страницы из Datasheet.
Для удобства ниже приведены эти таблицы в виде картинок (нумерация регистров, как и всё в цифровой электронике начинается с 0, поэтому номер четвертого – 3).
Как подключить и на каком языке программировать?
Чтобы запустить этот микроконтроллер достаточно подать плюс на Vdd и минус на Vss. Если нужен кварцевый резонатор, то он подключается к выводам 16 и 15 (OSC1 и OSC2) микроконтроллера PIC16f628, для других контроллеров с большим или меньшим числом выводов – смотрите в datasheet. Но этот момент нужно указывать при программировании и прошивке.
Кстати о переносимости и совпадении цоколевки – на 16f84A – она аналогична, и на многих других.
Фрагмент схемы с подключенным к pic16f628a внешним резонатором:
Есть два основных языка для программирования микроконтроллеров PIC – это assembler и C, есть и другие, например PICBasic и т.д. Еще можно выделить упрощенный язык программирования JAL (just another language).
Для примера ниже приведена программа для «мигания светодиодом» — своего рода «Hello World» для микроконтроллера PIC на языке C.
В 1 строке подключается библиотека микроконтроллеров PIC, далее подключается библиотека программы задержки.
В функции main(void) в начале устанавливаются начальные параметры, подобно тому как мы это делали в функции Void setup () – в статьях об ардуино. Далее в строках 11-16 объявляется бесконечный цикл while(1), в ходе которого и выполняется программа «мигания светодиодом».
В примере состояние порта постоянно инвертируется, т.е. если он был в «0», то перейдет в «1» и наоборот. На C для PIC есть следующие команды управления команды:
PORTA = 0; // переводит все пины порта А в низкий уровень (лог. 0)
PORTB = 0xff; // переводит все пины порта B в высокий уровень (лог. 1)
RB5 = 1; // На пятом выводе порта B высокий уровень
А так выглядит та же программа, но уже на языке JAL, я перевел на русский язык комментарии от разработчиков встроенных примеров в JALedit (среда разработки).
Возникает соблазн выбрать JAL, и вам он может показаться проще. Безусловно на нём можно реализовать любые проекты, но с точки зрения пользы для вас как для специалиста – это бесполезный язык. Значительно больших результатов вы добьетесь, изучая синтаксис и принципы программирования на языке C (большая часть популярных сейчас языков C-подобны) или на Assembler – это низкоуровневый язык, который заставит вас понимать принцип работы устройства и что происходит в программе в каждый конкретный момент времени.
В чем работать
Если сказать совсем обобщенно для работы с любыми микроконтроллерами нужно:
1. Текстовый редактор.
2. Компилятор.
3. Программа для загрузки прошивки в микроконтроллер.
И я даже читал старые учебники, где автор, работая из-под DOS писал код, компилировал и прошивал его разными средствами. Сейчас же под все популярные операционные системы есть среды для разработки, как узкоспециализированные (для конкретного семейства микроконтроллеров или семейств от одного производителя) так и универсальные (либо содержат все необходимые инструменты, либо они подключаются в виде плагинов).
Например, в цикле статей об Arduino мы рассматривали среду Arduino IDE в ней же мы и код писали и с её помощью «заливали» прошивку в «камень». Для микроконтроллеров PIC есть такие программы, как:
MPASM — используется для разработки на языке Assembler от фирмы Microchip;
MPLAB — также IDE от Microchip для PIC-контроллеров. Состоит из множества блоков для тестирования, проверки, работы с кодом и компиляции программ и загрузки в микроконтроллер. Также есть версия MPLAB X IDE – отличается большим функционалом и построена на базе платформы NetBeans;
MikroC — универсальная среда (не только для ПИКов) для разработки. Как видно из названия «заточена» под программирование на C, а также есть такие программы как MikroBasic и MikroPascal, для соответствующих языков;
JALedit — подходит для языка JAL, о котором мы упоминали выше;
И ряд других менее известных.
Как прошивать микроконтроллер?
Для PIC-микронотроллеров есть ряд программаторов. Официальным считается PICkit. Их 4 версии. Но можно прошивать и универсальными, например, TL866 (он поддерживает почти всё, что может понадобится начинающему радиолюбителю, при этом очень дешевый).
Также в сети есть ряд различных схем программаторов для ПИКов, как для работы через COM-порт:
Так и через USB (на самом деле тоже com, только через преобразователь на ИМС MAX232).
Заключение
Микроконтроллеры PIC16 подходят для простых проектов, типа простой автоматики, вольтметров, термометров и прочих мелочей. Но это не значит, что нельзя делать на этом семействе сложные и большие проекты, я привел пример того для чего чаще всего их используют. Для общего представления рекомендую посмотреть несколько видео:
В одной статье рассматривать темы о том, как программировать микроконтроллеры, неважно какого семейства, безсмысленно. Поскольку это очень большой объём информации. Для начинающих советую к прочтению:
Катцен С. — PIC-микроконтроллеры. Все что вам необходимо знать;
Кёниг А. — Полное руководство по PIC микроконтроллерам;
Шпак Ю.А. — Программирование на языке С для AVR и PIC микроконтроллеров;
Магда Ю.С. — Микроконтроллеры PIC: архитектура и программирование;
Яценков В.С. — Микроконтроллеры Microchip. Практическое руководство.
Алексей Бартош
Pic 12f629 / 12f675. мигающий светодиод
Цены на pic12f675 и pic12f629 на столько низкие, что радиолюбители очень часто применяют эти микроконтроллеры ради спортивного интереса и забавы. Они просты, не прихотливы, и если делать всё правильно, то сжечь его тяжело, но! Главное не стереть специальную поправку (константу), записанную в чип на заводе изготовителя, её восстановить можно, но для новичков и начинающих радиолюбителей сложно, поэтому нужно быть внимательнее, при прошивке.
В этой статье пойдёт речь о простой програмке для проверки, тестирования работы PIC12F675 микроконтроллера . Когда вы начинаете изучение языка программирования C , Visual Basic или любого другого языка — ваш первый шаг, написание программы, которая выводит на экран компьтера текст «Привет Мир». Когда вы начинаете изучать программирование микроконтроллеров PIC, эквивалентом «Привет Мир», будем размеренное мигание светодиода.
Восстановление osscal для 12f629 & 12f675
pic12F629 и pic12F675, для работы этих микроконтроллеров от внутреннего генератора завод изготовитель задает внутреннюю калибровочную константу (OSSCAL) это необходимо для большей точности внутреннего генератора. Если ее удалить то микроконтроллер либо не будет работать либо будет но некорректно. Можно использовать pic с упятеренными константами в схемах где используется внешний кварц или другой генератор. Но теперь можно и восстановить эту константу!

Многие часы поддерживают точное время благодаря частоте сети 50 или 60Гц. Для восстановления pic мы будем использовать этот простой генератор частоты – сеть, что упрощает конструкцию и не требует создания отдельного генератора.
Схема:
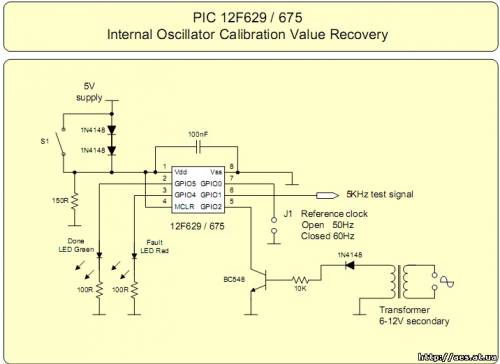
Очень важно не выпрямлять напряжение после трансформатора! Напряжение вторичное 6-12В. Плата должна быть собрана в точности как на схеме.
Конденсатор 100n должен быть размещен как можно ближе к микроконтроллеру!
S1 разомкнут – калибровка происходит на 3,4 вольта
S1 замкнут – калибровка происходит на 5 Вольт
Частота внутреннего генератора в ПИК зависит от изменения температуры и напряжения питания. Когда переключатель S1 разомкнут 5 вольт питания подается на ПИК, напряжение падает через два диода примерно 3,4 Вольта получается. S1 замкнут – ПИК работает на 5 вольт.
Перед началом работы необходимо зашить в 12F629 или 12F675 (будет работать и стем и тем).
Эта прошивка требуется только для вычисления нового значения калибровки.
Скачать прошивку
Скачать печатку в LEY от shpuntic
Выполнение калибровки:
1) Замкнуть J1, если частота вашей сети 60 Гц и оставьте ее разомкнутой, если она 50Hz.
2) Опорный сигнал переменного тока должен присутствовать перед включением pic при калибровке для обеспечения стабильного сигнала и работы.
3) Вставьте pic в панельку (предварительно он должен быть зашит прошивкой см.выше), разомкнуть ключ S1 .
4) Когда pic начинает работать светодиоды будут мигать одновременно.
5) Если ни один опорный сигнал (50 или 60Гц) не обнаружен на ноге GP2 (пин 5), светодиод будет мигать . (Если это произойдет, выключите питание pic и перепроверьте правильность монтажа и т.д.)
6) В процессе калибровки светодиоды не горят. Калибровки происходит менее чем за 5 секунд.
7) Если калибровка не удалось, красный светодиод загорится.
8) Если калибровка успешна зеленый загорится, и 5 кГц тестового сигнала будут созданы на GPIO1. Если у вас есть частотомер вы можете использовать это для проверки калибровки.
9) После калибровки, вы можете размыкать и замыкать переключатель S1 в ходе мониторинга сигнала 5 кГц тест, чтобы увидеть изменения частоты против напряжения питания.
10) Выключите, удалить ПИК из панельки, и считать с него данные с помощью вашего программатора.
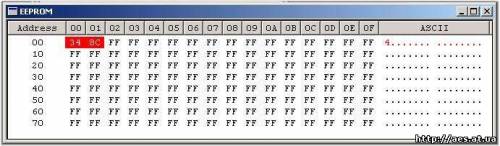
11) Когда вы считаете EEPROM оно будет содержать один из трех пар значений адреса 0x00 и 0x01 следующим образом:
 EEPROM адреса 0x00 и 0x01 содержать 0xFF
EEPROM адреса 0x00 и 0x01 содержать 0xFF
код не смог нормально работать.
EEPROM адреса 0x00 и 0x01 0x00 содержат
код не был запущен, не удалось установить калибровку . Убедитесь, что J1 установлена правильно и повторите попытку.
 Адрес 0x00 0x34 EEPROM содержит 0x01 и адрес, где содержатся 0xNN НН “новое значение калибровки.
Адрес 0x00 0x34 EEPROM содержит 0x01 и адрес, где содержатся 0xNN НН “новое значение калибровки.
код с успехом завершен и калибровка OSCCAL прошла правильно. Используйте 0xNN значение в адрес 0x01 для калибровки памяти.
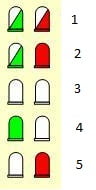
1 – оба светодиода будут мигать, питание есть
2 – зеленый мигает, красный горит, не найдено опорное напряжение (50-60Гц)
3 – светодиоды не горят, идет процесс калибровки, менее 5 сек
4- калибровка прошла правильно
5 – калибровка не прошла
В случае возникновения следующей проблемы необходимо пользоваться модифицированной прошивкой: при прохождении успешной калибровки, загорается зеленый светодиод но при считывании информации с микроконтроллера, с адреса 0x00 и 0x01 содержать 0xFF.
Модифицированный вариант прошивки, скачать
Если калибровка выполнена успешно, вытянуть из панельки pic и поместить его обратно в программатор. Считываются данные из EEPROM памяти (а не программной памяти), где только что вычисленное значение было сохранено. (См. пример ниже)
Прошиваем pic со значение константы, записываем ее как положено в последнюю ячейку:
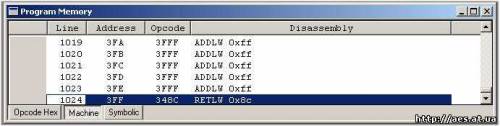
Фото от пользователя rastamanoff :

Обсуждения на форуме
Мой самодельный ветрогенератор на шаговом двигателе | мои увлекательные и опасные эксперименты
Проезжая на велосипеде мимо дачных участков, я увидел работающий ветрогенератор:
Большие лопасти медленно, но верно вращались, флюгер ориентировал устройство по направлению ветра.
Мне захотелось реализовать подобную конструкцию, пусть и не способную вырабатывать мощность, достаточную для обеспечения “серьезных” потребителей, но все-таки работающую и, например, заряжающую аккумуляторы или питающую светодиоды.
потребителей, но все-таки работающую и, например, заряжающую аккумуляторы или питающую светодиоды.
Шаговые двигатели
Одним из наиболее эффективных вариантов небольшого самодельного ветроэлектрогенератора является использование шагового двигателя (ШД) (англ. stepping (stepper, step) motor) – в таком моторе вращение вала состоит из небольших шагов. Обмотки шагового двигателя объединены в фазы. При подаче тока в одну из фаз происходит перемещение вала на один шаг.
Эти двигатели являются низкооборотными и генератор с таким двигателем может быть без редуктора подключен к ветряной турбине, двигателю Стирлинга или другому низкооборотному источнику мощности. При использовании в качестве генератора обычного (коллекторного) двигателя постоянного тока для достижения таких же результатов потребовалась бы в 10-15 раз более высокая частота вращения.
Особенностью шаговика является достаточно высокий момент трогания (даже без подключенной к генератору электрической нагрузки), достигающий 40 грамм силы на сантиметр.
Коэффициент полезного действия генератора с ШД достигает 40 %.
Для проверки работоспособности шагового двигателя можно подключить, например, красный светодиод. Вращая вал двигателя, можно наблюдать свечение светодиода. Полярность подключения светодиода не имеет значения, так как двигатель вырабатывает переменный ток.
Кладезем таких достаточно мощных двигателей являются пятидюймовые дисководы гибких дисков, а также старые принтеры и сканеры.
Двигатель 1
Например, я располагаю ШД из старого 5.25″ дисковода, работавшего еще в составе ZX Spectrum – совместимого компьютера “Байт”.
Такой дисковод содержит две обмотки, от концов и середины которых сделаны выводы – итого из двигателя выведено шесть проводов:
первая обмотка (англ. coil 1) – синий (англ. blue) и желтый (англ. yellow);
вторая обмотка (англ. coil 2) – красный (англ. red) и белый (англ. white);
коричневые (англ. brown) провода – выводы от средних точек каждой обмотки (англ. center taps).
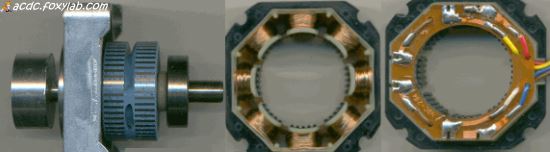
разобранный шаговый мотор
Слева виден ротор двигателя, на котором видны “полосатые” магнитные полюсы – северный и южный. Правее видна обмотка статора, состоящая из восьми катушек.
Сопротивление половины обмотки составляет ~ 70 Ом.
Я использовал этот двигатель в первоначальной конструкции моего ветрогенератора.
Двигатель 2
Находящийся в моем распоряжении менее мощный шаговый двигатель T1319635 фирмы Epoch Electronics Corp. из сканера HP Scanjet 2400 имеет пять выводов (униполярный мотор):
первая обмотка (англ. coil 1) – оранжевый (англ. orange) и черный (англ. black);
вторая обмотка (англ. coil 2) – коричневый (англ. brown) и желтый (англ. yellow);
красный (англ. red) провод – соединенные вместе выводы от средней точки каждой обмотки (англ. center taps).
Сопротивление половины обмотки составляет 58 Ом, которое указано на корпусе двигателя.
Двигатель 3
В улучшенном варианте ветрогенератора я использовал шаговый двигатель Robotron SPA 42/100-558, произведенный в ГДР и рассчитанный на напряжение 12 В:
Ветротурбина
Возможны два варианта расположения оси крыльчатки (турбины) ветрогенератора – горизонтальное и вертикальное.
Преимуществом горизонтального (наиболее популярного) расположения оси, располагающейся по направлению ветра, является более эффективное использование энергии ветра, недостаток – усложнение конструкции.
Я выбрал вертикальное расположение оси – VAWT (vertical axis wind turbine), что существенно упрощает конструкцию и не требует ориентации по ветру. Такой вариант более пригоден для монтирования на крышу, он намного эффективнее в условиях быстрого и частого изменения направления ветра.
ветротурбина Савониуса
Я использовал тип ветротурбины, называемый ветротурбина Савониуса (англ.Savonius wind turbine). Она была изобретена в 1922 году Сигурдом Йоханнесом Савониусом (Sigurd Johannes Savonius) из Финляндии.
Сигурд Йоханнес Савониус
Работа ветротурбины Савониуса основана на том, что сопротивление (англ. drag) набегающему потоку воздуха – ветру вогнутой поверхности цилиндра (лопасти) больше, чем выпуклой.
Коэффициенты аэродинамического сопротивления (англ. drag coefficients) $C_D$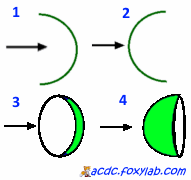
двумерные тела:
вогнутая половина цилиндра (1) – 2,30
выпуклая половина цилиндра (2) – 1,20
плоская квадратная пластина – 1,17
трехмерные тела:
вогнутая полая полусфера (3) – 1,42
выпуклая полая полусфера (4) – 0,38
сфера – 0,5
Указанные значения приведены для чисел Рейнольдса (англ. Reynolds numbers) в диапазоне $10^4 – 10^6$. Число Рейнольдса характеризует поведение тела в среде.
Сила сопротивления тела воздушному потоку ${F_D} = {{1 over 2} {C_D} S rho {v^2} } $, где $rho$ – плотность воздуха, $v$ – скорость воздушного потока, $S$ – площадь сечения тела.
Такая ветротурбина вращается в одну и ту же сторону, независимо от направления ветра: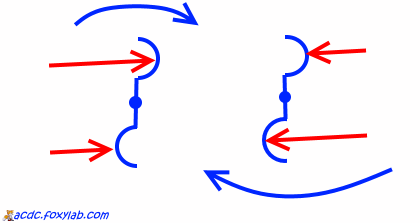
Подобный принцип работы используется в чашечном анемометре (англ. cup anemometer) – приборе для измерения скорости ветра: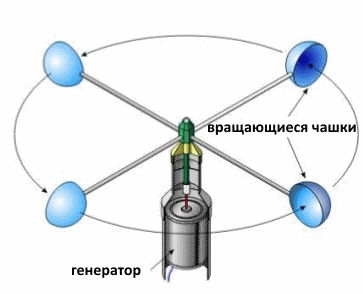
Такой анемометр был изобретен в 1846 году ирландским астрономом Джоном Томасом Ромни Робинсоном (John Thomas Romney Robinson):
Робинсон полагал, что чашки в его четырехчашечном анемометре перемещаются со скоростью, равной одной трети скорости ветра. В реальности это значение колеблется от двух до немногим более трех.
В настоящее время для измерения скорости ветра используются трехчашечные анемометры, разработанные канадским метеорологом Джоном Паттерсоном (John Patterson) в 1926 году:
Генераторы на коллекторных двигателях постоянного тока с вертикальной микротурбиной продаются на eBay по цене около $5: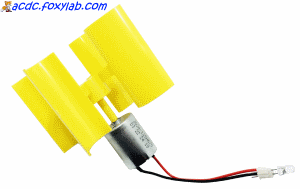
Такая турбина содержит четыре лопасти, расположенные вдоль двух перпендикулярных осей, с диаметром крыльчатки 100 мм, высотой лопасти 60 мм, длиной хорды 30 мм и высотой сегмента 11 мм. Крыльчатка насажена на вал коллекторного микродвигателя постоянного тока с маркировкой JQ24-125H670. Номинальное напряжение питания такого двигателя составляет 3 … 12 В.
Энергии, вырабатываемой таким генератором, хватает для свечения “белого” светодиода.
Скорость вращения ветротурбины Савониуса не может превышать скорость ветра, но при этом такая конструкция характеризуется высоким крутящим моментом (англ. torque).
Эффективность ветротурбины можно оценить, сравнив вырабатываемую ветрогенератором мощность с мощностью, заключенной в ветре, обдувающем турбину:
$P = {1over 2} rho S {v^3}$ , где $rho$ – плотность воздуха (около 1,225 кг/м3 на уровне моря), $S$ – ометаемая площадь турбины (англ. swept area), $v$ – скорость ветра.
Моя ветротурбина
Вариант 1
Первоначально в крыльчатке моего генератора использованы четыре лопасти в виде сегментов (половинок) цилиндров, вырезанных из пластиковых труб:
Размеры сегментов –
длина сегмента – 14 см;
высота сегмента – 2 см;
длина хорды сегмента – 4 см;
расстояние от начала сегмента до центра оси вращения – 3 см.
Я установил собранную конструкцию на достаточно высокой (6 м 70 см) деревянной мачте из бруса, прикрепленную саморезами к металлическому каркасу:
Вариант 2
Недостатком генератора была достаточно высокая скорость ветра, требуемая для раскрутки лопастей. Для увеличения площади поверхности я использовал лопасти, вырезанные из пластиковых бутылок: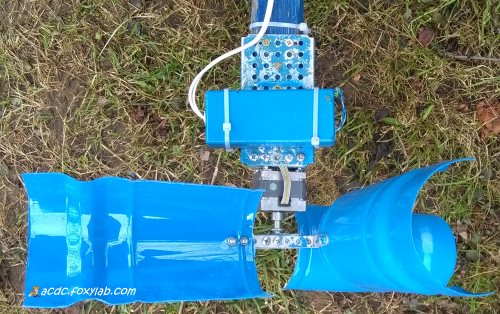
Размеры сегментов –
длина сегмента – 18 см;
высота сегмента – 5 см;
длина хорды сегмента – 7 см;
расстояние от начала сегмента до центра оси вращения – 3 см.
Вариант 3
Проблемой оказалась прочность держателей лопастей. Сначала я использовал перфорированные алюминиевые планки от советского детского конструктора толщиной 1 мм. Через несколько суток эксплуатации сильные порывы ветра привели к излому планок (1). После этой неудачи я решил вырезать держатели лопастей из фольгированного текстолита (2) толщиной 1,8 мм:
Прочность текстолита на изгиб перпендикулярно пластине составляет 204 МПа и сравним с прочностью на изгиб алюминия – 275 МПа. Но модуль упругости алюминия $E$ (70000 МПа) намного больше, чем у текстолита (10000 МПа), т.е. тексолит намного эластичнее алюминия. Это, по моему мнению, с учетом большей толщины текстолитовых держателей, обеспечит гораздо большую надежность крепления лопастей ветрогенератора.
Ветрогенератор смонтирован на мачте:
Опытная эксплуатация нового варианта ветрогенератора показала его надежность даже при сильных порывах ветра.
ветротурбина Дарье
Недостатком турбины Савониуса является невысокая эффективность – только около 15 % энергии ветра преобразуется в энергию вращения вала (это намного меньше, чем может быть достигнуто с ветротурбиной Дарье (англ. Darrieus wind turbine)), использующей подъемную силу (англ. lift). Этот вид ветротурбины был изобретен французским авиаконструктором Жоржем Дарье (Georges Jean Marie Darrieus) – патент США от 1931 года № 1,835,018.
Жорж Дарье
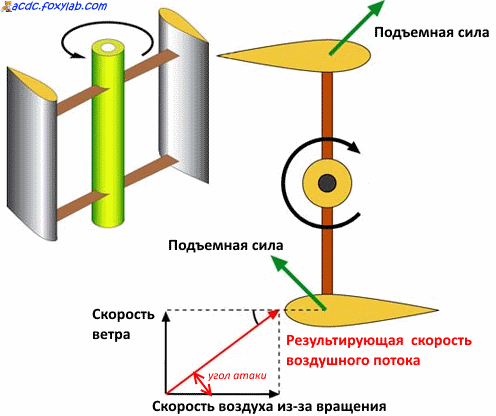
Недостатком турбины Дарье является то, что у нее очень плохой самозапуск (для выработки крутящего момента от ветра турбины уже должна быть раскручена).
Преобразование электроэнергии, вырабатываемой шаговым двигателем
Выводы шагового двигателя могут быть подключены к двум мостовым выпрямителям, собранным из диодов Шоттки для снижения падения напряжения на диодах.
Можно применить популярные диоды Шоттки 1N5817 с максимальным обратным напряжением 20 В, 1N5819 – 40 В и максимальным прямым средним выпрямленным током 1 А. Я соединил выходы выпрямителей последовательно с целью увеличения выходного напряжения.
Также можно использовать два выпрямителя со средней точкой. Такой выпрямитель требует в два раза меньше диодов, но при этом и выходное напряжение снижается в два раза.
Затем пульсирующее напряжение сглаживается с помощью емкостного фильтра – конденсатора 1000 мкФ на 25 В. Для защиты от повышенного генерируемого напряжения параллельно конденсатору включен стабилитрон на 25 В.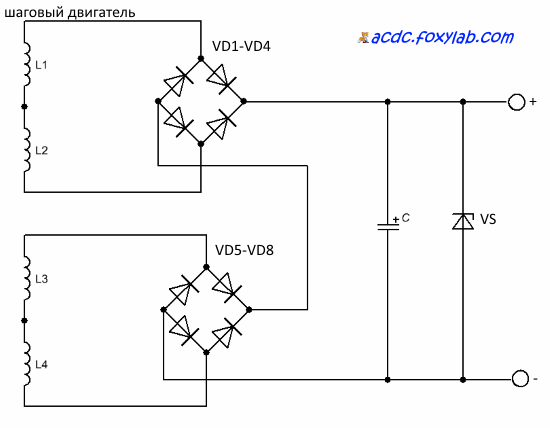
схема моего ветрогенератора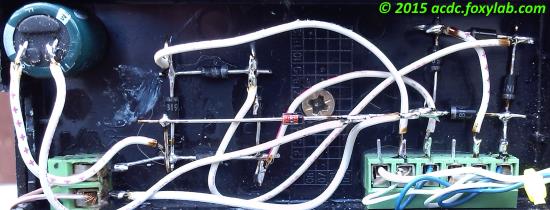
электронный блок моего ветрогенератора
Применение ветрогенератора
Вырабатываемое ветрогенератором напряжение зависит от величины и постоянства скорости ветра.
При ветре, колышущем тонкие ветви деревьев, напряжение достигает 2 … 3 В.
При ветре, колышущем толстые ветви деревьев, напряжение достигает 4 … 5 В (при сильных порывах – до 7 В).
ПОДКЛЮЧЕНИЕ К JOULE THIEF
Сглаженное напряжение с конденсатора ветрогенератора может подаваться на Joule Thief – низковольтный DC-DC преобразователь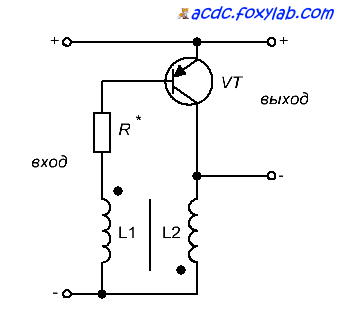
Значение сопротивления резистора R подбирается экспериментально (в зависимости от типа транзистора) – целесообразно использовать переменный резистор на 4,7 кОм и постепенно уменьшать его сопротивление, добиваясь стабильной работы преобразователя.
Я собрал такой преобразователь на базе германиевого pnp-транзистора ГТ308В (VT) и импульсного трансформатора МИТ-4В (катушка L1 – выводы 2-3, L2 – выводы 5-6) :
ЗАРЯД ИОНИСТОРОВ (СУПЕРКОНДЕНСАТОРОВ)
Ионистор (суперконденсатор, англ. supercapacitor) представляет собой гибрид конденсатора и химического источника тока.
Ионистор – неполярный элемент, но один из выводов может быть помечен “стрелкой” – для обозначения полярности остаточного напряжения после его зарядки на заводе-изготовителе.
Для первоначальных исследований я использовал ионистор 5R5D11F22H емкостью 0,22 Ф на напряжение 5,5 В (диаметр 11,5 мм, высота 3,5 мм):
Я подключил его через диод к выходу Joule Thief через германиевый диод Д310.
Для ограничения максимального напряжения зарядки ионистора можно использовать стабилитрон или цепочку светодиодов – я использую цепочку из двух красных светодиодов: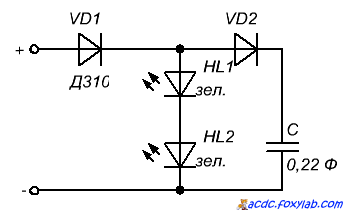
Для предотвращения разряда уже заряженного ионистора через ограничительные светодиоды HL1 и HL2 я добавил еще один диод – VD2.
Продолжение следует
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
Очень похоже на схему обычного асинхронного двигателя.
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.
Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Управление шаговым двигателем с помощью микроконтроллера pic16f84 |
Системы, осуществляющие управление шаговым двигателем, как правило, имеют регистры сдвига, создающие нужную очередность управляющих импульсов, идущих на обмотки шагового двигателя.
Ниже приведена схема управление шаговым двигателем на микроконтроллере, позволяющая менять скорость вращения вала и выбирать направление его вращения. С устройством и принципом работы шагового двигателя можно ознакомится здесь.
Частота работы микроконтроллера задается внешним генератором (кварц на 4 МГц). На радиоэлементах R1 – R3, С1 и транзисторе VT1 построен генератор прямоугольных импульсов, частоту которого возможно плавно менять потенциометром R2.

Напряжение с емкости С1 идет на ввод RB5 микроконтроллера PIC16F184. После того как потенциал станет выше порогового значения, на выходе RB7 возникает высокий потенциал. Вследствие этого транзистор VT1 открывается и разряжает емкость, в след за этим цикл повторяется.
При вращении движка потенциометра R2 из одного крайнего положения в другое, скорость вращения шагового двигателя меняется от 27 до 128 оборотов в минуту. Необходимо заметить, что при повышении скорости вращения, уменьшается крутящий момент на валу шагового двигателя. Данная схема не обладает ОС, в связи с этим скорость вращения зависит как от сопротивления потенциометра R2, так и от нагрузки на вал.
Обмотки двигателя коммутируются через транзисторные ключи VT2-VT5. Для защиты транзисторов от всплеска самоиндукции, в схему добавлены диоды VD1 — VD4. Изменение направления вращения и остановка осуществляется с помощью кнопок SA1 — SA3. Запитать данную схему можно от лабораторного источника питания.
Транзистор 2SC1815 — любым марки КТ3102. Стабилизатор напряжения 78L05 и 7805 возможно заменить на КР142ЕН5А (В). Транзисторы VT2-VT5 обязаны выдерживать ток, протекающий по обмоткам двигателя.
 Скачать прошивку(1,0 MiB, скачано: 4 304)
Скачать прошивку(1,0 MiB, скачано: 4 304)

