

- Что такое home point?
- Основные поломки и их причины
- Основные неполадки квадрокоптеров и способы их устранения
- Почему квадрокоптер тянет в сторону
- Почему более 1000 владельцев квадрокоптеров syma доверяют нам:
- Что произойдет, если ваш пропеллер оторвется в середине полета?
- Базовые принципы полета квадрокоптера
- Виды неполадок квадрокоптера и способы их ремонта
- Запчасти walkera
- Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
- Как провести триммирование для квадрокоптера
- Не вращается один или несколько двигателей
- Несложный ремонт квадрокоптера (с микроскопом)
- Ошибка: «недостаточно силы/esc» и «максимальная достигнутая нагрузка»
- Пульт дистанционного управления отключается при полете
- Советы по полетам на квадрокоптере
- Статьи в тему:
Что такое home point?
Домашняя точка по умолчанию является первым местом, где дрон получил сильные сигналы GNSS (данные о местоположении). В приложении DJI Fly App белый значок GNSS будет содержать не менее 4 белых полос. Индикатор состояния Mavic Mini быстро мигает зеленым после того, как Home Point была записана.
Домашняя точка может быть записана неправильно – с версиями прошивки, предшествующими v01.00.0400, можно было взлетать и летать со слабым сигналом GPS или при плохом освещении. Если у вас слабый сигнал GPS на взлете, то домашняя точка будет записана неправильно.
Домашняя точка будет записана, когда дрон обнаружит сильный сигнал GPS это будет означать то, что дрон вернется в другую домашнюю точку, чем в ту которую вы хотели.
В версии встроенного ПО v01.00.0400 была добавлена функция отключения взлета при слабом сигнале GPS (GPS <8) и недостаточном освещении окружающей среды. Эту функцию можно отключить вручную (требуется приложение DJI Fly v1.0.4 или новее).
Слабый или недоступный GPS. Несмотря на то что у вас может быть записана домашняя точка при взлете, ваш дрон не сможет вернуться в исходную точку, если сигнал GPS станет слабым или недоступным. Очень важно летать в местах, где сигнал GPS сильный.
Заряд батареи — Батарея разрядилась до уровня, при котором она не может позволить вернуться квадрокоптеру в исходную точку и вместо этого он будет вынужден совершить аварийную посадку.
Полет против ветра — может сильно замедлить работу любого дрона и довольно быстро разрядить аккумулятор.
Откалибруйте компас и IMU — если ваш дрон не возвращается в исходную точку, возможно он не знает своего точного местоположения из-за электромагнитных помех или у него возникают проблемы с правильным поиском глобальных спутников.
Откалибруйте компас. Несмотря на то, что IMU касается позиционирования калибровка IMU (инерциальный измерительный блок)также не является плохой идеей.
Читайте: Как правильно делать калибровку квадрокоптера?
Потерянное соединение с пультом дистанционного управления — Функция отказоустойчивого RTH автоматически активируется на многих моделях после потери сигнала пульта дистанционного управления в течение более 11 секунд. Тем не менее, это зависит от того, была ли домашняя точка была успешно записана в первую очередь.
Сильный ветер — Если дрон летит обратно в исходную точку с определенной скоростью. Если ветрено, дрон не сможет достичь конечной точки вовремя и совершит аварийную посадку.
Читайте: Как не потерять свой квадрокоптер и что делать если это случилось?
Высота над уровнем моря – если вы не летаете на открытой местности, может быть важно установить другую высоту, чем высота по умолчанию 20 метров (65,61). Полеты в местах, где есть деревья, канавы, высокие кусты и т. Д. Вы можете установить другую высоту RTH в приложении DJI Fly.
Основные поломки и их причины
Причины повреждений гидравлических компонентов разнообразны. В этой таблице собраны основные неисправности гидросистем, их причины и способы исправления.
| Отсутствует подача жидкости в систему, которую должно обеспечить насосное оборудование | Засорился всасывающий трубопровод | Прочистить |
| Недостаточное количество жидкости в баке | Добавить рабочую жидкость до требуемого уровня | |
| Подсос воздушной струи во всасывающий трубопровод | Проверить герметичность соединений и подтянуть их | |
| Неисправность насоса | Определить причину поломки и устранить ее | |
| Вязкость рабочей жидкости, не соответствующая требуемой величине | Заменить жидкость | |
| Низкое давление в системе | Высокие внутренние протечки в насосе из-за его повышенного износа | Проверить работу насосного оборудования на ХХ и под нагрузкой. Если КПД не соответствует паспортной величине, то насос реставрируют или заменяют |
| Большие протечки в системе | Поставить новые уплотнения, проконтролировать узлы на герметичность | |
| Снижение вязкости масла при повышении температуры обычно выше 50°C | Проконтролировать и улучшить условия маслоохлаждения | |
| Большие наружные утечки в насосе через его корпус | Обследовать уплотнительные элементы, осмотр корпуса насоса на предмет наличия трещин и других дефектов | |
| Повышенный уровень шума и вибраций | Засорение фильтрующего элемента | Промыть или при необходимости установить новый |
| Подсос наружного воздуха во всасывающем трубопроводе | Проверить и затянуть соединения | |
| Большое сопротивление во всасывающих трубах | Заменить их на изделия большего сечения | |
| Вибрации клапана | Проверить каналы демпфирования | |
| Слабая фиксация труб | Подтянуть крепления | |
| Резкое снижение скорости при росте нагрузки | Клапаны настроены на низкое давление | Исправить регулировку клапанов |
| Повышенные протечки | Проверить соединения и уплотнения | |
| Плавное уменьшение скорости рабочего органа | Загрязнение рабочей жидкости | Замена гидравлической жидкости |
| Засор фильтров и дросселей | Промыть или заменить фильтры | |
| Снижение вязкости рабочей среды | Залить новую гидравлическую жидкость | |
| Повышение температуры масла выше требуемого значения | Неэффективно работающая система отведения тепла | Улучшить отвод тепла от труб или бака |
| Насос не разгружается в нерабочем состоянии | Проверить и отремонтировать разгрузочное устройство | |
| Слишком большие запасы по характеристикам насосного оборудования – давлению и подаче | Подобрать насосное оборудование с параметрами, соответствующими характеристикам системы | |
| Предохранительный клапан не держит давление | Загрязнение клапанного седла или клапана | Прочистить, промыть компоненты |
| Износ седла | Заменить деталь | |
| Поломка пружины | Заменить деталь | |
| Гул и перегрев электромагнитов | Слишком жесткая пружина | Установить более слабую пружину |
| Несоответствие напряжения тока питания номинальному значению | Наладить напряжение тока | |
| Отсутствует реверс масла золотником | Заедание золотника | Разборка и промывка золотникового элемента, ослабление крепежей, повышение давления в цепи управления |
Основные неполадки квадрокоптеров и способы их устранения
Как и любому другому сложному техническому устройству с большим количеством механических деталей, подверженных постоянным нагрузкам, квадрокоптерам, иногда, свойственно ломаться.
Для того, чтобы вы, при первой же поломке квадрокоптера, которую вполне можно устранить своими силами, не теряли голову и не мчались в пункт ремонта, мы и подготовили данную подборку, в которой вы найдете основные неполадки квадрокоптеров, а также способы, которыми их можно устранить.
Основные неполадки квадрокоптеров и способы их устранения
1. Нет связи передатчика и квадрокоптера. Вероятнее всего ручка газа не стоит на положении минимум. Установите ее до упора на себя и не трогайте до тех пор, пока не будет завершена инициализация квадрокоптера.
2. Погас и/или не загорается индикатор на передатчике. Это означает, что батарейки полностью разрядились и необходимо их заменить на новые.
3. Система стабилизации квадрокоптера работает плохо или неправильно. Вероятнее всего были неправильно инициализированы начальные настройки. Посадите квадрокоптер на ровную поверхность и подождите некоторое время, после чего осуществите повторный взлет. Также на плохую работу стабилизации квадрокоптера оказывает влияние низкое напряжение от разряжающегося аккумулятора.
Основные неполадки квадрокоптеров и способы их устранения
4. При полетах квадрокоптера или запуске двигателей наблюдаются посторонние шумы и вибрация. Вероятнее всего имеются повреждения корпуса или пропеллеров.
5. Квадрокоптер не может оторваться от земли и взлететь. Такая ситуация наблюдается при неправильной установке винтов или двигатель. Внимательно проверьте маркировку каждого из них и сравните со схемой, которая приводится в руководстве пользователя вашей модели квадрокоптера.
6. Оказал двигатель. Проверьте провода, идущие к двигателю и контакты. Если с ними все в порядке, то двигатель сгорел и его необходимо заменить на новый. Также проблема может быть и более сложной и скрываться в регуляторе скорости и полетном контроле. Их также следует проверить и, при необходимости, заменить.
7. После того как квадрокоптер потерпел крушение, вал одного или нескольких двигателей вращаются со скрежетом и чрезмерным усилием. Аккуратно надавите на вал двигателя а, затем, потяните на себя. В том случае, если он продолжит работать неправильно, придется менять весь мотор.
8. После неудачной посадки или встречи с препятствием сдвинуты лучи. Скорее всего ваша модель квадрокоптера оснащена ударопоглощающей конструкцией и сдвинуть лучи в первоначальное положение следует руками, после чего необходимо нажать на соответствующие защелки.
Основные неполадки квадрокоптеров и способы их устранения
9. Не получается выполнить сложные фигуры в воздухе, в частности, кульбит. Скорее всего вам следует включить режим эксперта. Также проверьте уровень заряда аккумулятора – возможно квадрокоптеру просто не хватает мощности.
10. Квадрокоптер слишком чувствителен к командам, поступающим с пульта дистанционного управления, из-за чего полет получается резким, а управление не комфортным. Здесь, напротив, вам не хватает опыта управления, и режим эксперта следует сменить на другой, с более низкой чувствительностью управления.
11. Во время полета квадрокоптер постоянно сносит в одну из сторон. Эта проблема явно указывает на неправильную калибровку. Установите квадрокоптер на столе или любой другой ровной поверхности и подложите подкладку из нескольких листов бумаги или тонкий картон под тот луч, в сторону которого квадрокоптер отклоняется в полете. После того как калибровка будет произведена вновь, проблема должна исчезнуть.
12. Качество видео с квадрокоптера плохое. Во-первых, выбирайте модели квадрокоптеров с хорошей современной оптикой, а, во-вторых, используйте качественные карты памяти от известных производителей.
Источник
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
- Неправильные настройки. Перед отправкой в магазины дроны подготавливают для полета, но в процессе многочисленных транспортировок калибровка может сбиться.
- Слишком туго насажен один из винтов. Если при сборке допущена ошибка, и какой-то пропеллер вращается с большим усилием, нежели остальные, квадрокоптер будет тянуть в сторону.
- На ось двигателя в месте крепления винта намотались нитки, травинки или волосы. Такое часто случается со старыми дронами — сам пропеллер в порядке, но лишние элементы тормозят его вращение.
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом.

Почему более 1000 владельцев квадрокоптеров syma доверяют нам:
В 90% случаях, мы бесплатно выезжаем в любую точку города в течении часа, для доставки квадрокоптера Syma до рабочего места технического инженера. Опытный курьер бережно отнесется к вашему имуществу и в целости доставит его в лабораторию
У нас в 80% случаев, ремонт дронов Syma выполняется менее чем за 1 сутки, а диагностика за 15-20 минут. Присутствует также срочный ремонт, он занимает от 30 минут времени, благодаря этому вы в кратчайшие сроки получите ваш квадрокоптер Syma исправным и готовым к работе.
Только мы, ремонтируем по стандарту ISO:9001-2008, используем оригинальные запчасти от производителя и проводим правильную диагностику, которая позволяет точно определить причину неисправности. При этом мы постоянно обновляем профессиональное оборудование в наших лабораториях.
Телефон директора, лица и фамилии сотрудников доступны в офисе. Мы отвечаем за работу каждого специалиста и тщательно контролируем деятельность всех отделов нашего сервиса. Только у нас высококвалифицированные специалисты, которые знают свое дело и справляются с любыми, даже самыми сложными поломками квадрокоптеров Syma.
Мы ценим отношение клиентов к нам настолько сильно, что при окончании гарантийного срока можно рассчитывать на бесплатный ремонт квадрокоптера Syma. Система скидок для постоянных клиентов позволит вам быть уверенными, что в случае поломки вашего дрона Syma вы будете знать, куда обратиться для качественного ремонта по выгодным ценам.
Это возможно благодаря нашей CRM-системе, которая позволяет анализировать работу по 75 основным параметрам и с высокой точностью настраивать режим и ритм работы на нужды клиентов.
Источник
Что произойдет, если ваш пропеллер оторвется в середине полета?
В зависимости от типа вашего дрона, у вас может быть либо ужасная, дорогостоящая аварийная посадка на землю с высоты в сотни футов, либо ваш беспилотник может очень шатко вернуться к вам.
- Квадрокоптеры. Если у вас есть квадрокоптер и вы потеряете пропеллер в середине полета, то после этого вы определенно будете собирать осколки своего сломанного дрона. Квадрокоптеры не предназначены для полета всего с тремя пропеллерами, если они потеряют один, так как они немедленно потеряют равновесие и рухнут на землю.
- Гексакоптеры и октокоптеры. Поскольку у этих дронов больше пропеллеров, начнем с того, что если они потеряют пропеллер во время полета, это не повлияет на их способность оставаться в воздухе, так как есть больше пропеллеров, чтобы держать его в воздухе. Конечно, полет не будет самым плавным, а отснятый материал не будет самым лучшим, по крайней мере, беспилотник вернется к пилоту целым и невредимым.
Но всего этого можно избежать, если вы будете правильно обслуживать свой беспилотник, а также избегать вещей, которые могут привести к ослаблению пропеллеров вашего беспилотника.
Базовые принципы полета квадрокоптера
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Каждый квадрокоптер оснащен четырьмя винтами (квадро — четыре) постоянного шага. Под каждым винтом установлен небольшой двигатель коллекторного или бесколлекторного типа. Два винта совершают вращение против часовой стрелки, и два – по часовой.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
Виды неполадок квадрокоптера и способы их ремонта
Неисправности квадрокоптера бывают разных видов. Некоторые поломки очень серьезные и требуют мастерства опытного специалиста по ремонту. Более легкие неполадки можно распознать и исправить самостоятельно.

Если в целом квадрокоптер выглядит исправным, но не исполняет команду взлета, то стоит внимательно проверить настройки. Возможно, передатчик потерял связь с дроном из-за неправильного положения ручки газа. Также передатчик не воспринимать сигналы из-за батареек. В этом случае индикатор перестанет загораться при включении. Помехой для взлета может служить неправильная установка винтов. Обязательно сверьте местоположение и маркировку с инструкцией. Владельцы могут заметить неисправности и в процессе полета. Если траектория стала неровной, то поставьте квадрокоптер на плоскую горизонтальную поверхность и попробуйте запустить заново или проверьте аккумулятор.
Заметные визуальные неисправности возникают чаще всего после резкого приземления или столкновения дрона с препятствием. Единственным способом восстановить конструкцию является механическое воздействие. Если вернуть деталь в изначальное положение путем надавливания пальцами не получилось, то обратитесь в службу ремонта.
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Запчасти walkera
Покорение неба и тренировка навыков пилотирования всегда чреваты возможными поломками вертолета. Внешний вал для вертолета Walkera LAMA2-1 — HM-LM2-1-Z-07 и другие запчасти в ассортименте позволяют оперативно решать любые проблемы: от небольшого ремонта до сборки с нуля.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Внешний вал для вертолета Walkera LAMA2-1 — H.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Тип запчастей: другие запчасти и аксессуары, назначение: вертолеты
Самовывоз, Почта РФ, Курьером, Логистическая компания
Самовывоз, Почта РФ, Курьером, Логистическая компания
Крепление лопастей Walkera
Современные квадрокоптеры могут длительное время проводить в полете, поднимать солидный вес в виде дополнительной видеоаппаратуры и выполнять довольно сложные маневры. Плюс производители используют самые современные и надежные материалы для их сборки. Но, несмотря на вс.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Запчасть для Walkera Vitus 320 — Vitus 320-Z-.
Тип запчастей: модули и датчики
Самовывоз, Почта РФ, Курьером, Логистическая компания
OSD-модуль Walkera 250-Z-25
Моторама Walkera по выгодной цене
Самовывоз, Почта РФ, Курьером, Логистическая компания
Покорение неба и тренировка навыков пилотирования всегда чреваты возможными поломками вертолета. Внешний вал для вертолета Walkera LAMA400Q — HM-LM400-Z-06 и другие запчасти в ассортименте позволяют оперативно решать любые проблемы: от небольшого ремонта до сборки с нул.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Внешний вал для вертолета Walkera LAMA400Q -.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Назначение: вертолеты, тип аккумулятора: Li-Po, емкость аккумулятора: 3000 мА·ч, диаметр: 0.08 см
Самовывоз, Почта РФ, Курьером, Логистическая компания
Тип запчастей: контроллеры, платы, количество: 1 шт., количество: 1 шт
Самовывоз, Почта РФ, Курьером, Логистическая компания
Приемник Walkera DEVO RX710
Самовывоз, Почта РФ, Курьером, Логистическая компания
Вал внешний Walkera
Самовывоз, Почта РФ, Курьером, Логистическая компания
Крепление лопастей Walkera
Самовывоз, Почта РФ, Курьером, Логистическая компания
Самовывоз, Почта РФ, Курьером, Логистическая компания
Самовывоз, Почта РФ, Курьером, Логистическая компания
Межлопастной вал Walkera
Современные квадрокоптеры могут длительное время проводить в полете, поднимать солидный вес в виде дополнительной видеоаппаратуры и выполнять довольно сложные маневры. Плюс производители используют самые современные и надежные материалы для их сборки. Но, несмотря на вс.
Источник
Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
Прежде, чем заниматься ремонтом, по причине того, что не крутятся моторы, необходимо точно убедиться, что неисправен именно выход на мотор на полетном контроллере, именно это мы сейчас и сделаем.
Метод проверки прост и основывается на измерении уровня напряжения на всех четырех выходах на полетном контроллере и проверки, совпадают ли они.
Контроллер полета управляет регуляторами оборотов с помощью сигнала PWM (протоколы Oneshot и Multishot) или цифрового сигнала DShot.Обратите внимание, что мультиметры не умеют понимать такие сигналы. Но они могут работать как фильтр нижних частот и преобразовывать эти сигналы в показания напряжения, простыми словами, когда вы будете менять уровень газа (стик throttle, который слева на пульте), будет меняться и показания напряжения.
В идеале, напряжение на всех четырех выходах должно быть одинаковым.
Теперь перейдите во вкладку Motor в Betaflight Configurator и переместите ползунок на 2000 (100%). Измерьте снова напряжение, оно должно возрасти после того, как вы поднимете ползунок:
Для аналоговых сигналов, таких как PWM, Oneshot, Multishot — напряжение должно быть примерно 1,5V, когда газ находится на уровне 1000 (0%), а у DShot на этой же отметке будет 0.2V.
Когда газ будет на уровне 2000 (100%), напряжение для аналоговых сигналов будет выше 3V, в то время как у DShot будет около 0.4V.
Точная цифра не имеет значения, смысл в том, чтобы все одни были одинаковы на всех выходах. Если один из выходов выдает другое значение, которое отличается от других — этот выход неисправен.
Также бывает, что после прошивки один моторперестал крутиться, хотя до прошивки работал корректно. Это может произойти по нескольким причинам:
- У вас разные ESC (да, лично мне китайцы прислали один регулятор с другой маркировкой, 3 c PRO, а один не PRO);
- Вы не сделали калибровку моторов с регуляторами.
Для первого пункта, необходимо пару раз перепрошить регуляторы оборотов, бывает, что нормально работать начинают только со 2 или 3 раза. Подробнее о прошивке по ссылке выше, в синей рамке.
По второму пункту: видите скрин выше, вкладка Моторы? Отключите аккумулятора, но при этом не отключайтесь от Betaflight, затем поднимите ползунок Master вверх. Регуляторы начнут проигрывать звуки, после того как закончат, подсоедините аккумулятор и резко переведите ползунок в нижнее положение. Регуляторы оборотов снова начнут издавать звуки.
Если мотор не начал крутиться, повторите эти два пункта. У меня это срабатывает, думаю дело в разных регуляторах.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
- На пульте управления коптером находят кнопки или колесики, отвечающие за триммирование.
- Дрон запускают в работу и поднимают устройство в воздух отведением левого стика вниз.
- Набирают небольшую высоту и определяют, в какую именно сторону продолжает тянуть неисправный коптер.
- При наличии крена вправо триммируют дрон влево и наоборот.
- Проводят настройку до тех пор, пока устройство не начнет двигаться совершенно ровно.
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.

Не вращается один или несколько двигателей
Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.
Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить.
Несложный ремонт квадрокоптера (с микроскопом)
Недавно один мой хороший друг попросил меня «посмотреть» квадрокоптер
WLtoys v272
, который в результате неудачного пируэта приложился одним из лучей, после чего перестала полностью работать индикация этого луча и мотор стал работать с явными перебоями. При этом, если приложить небольшое усилие «на изгиб» — где-то что-то восстанавливалось и двигатель начинал работать в нормальном режиме.
Согласился «не глядя». И был очень впечатлен размерами «пациента»:

Надо разбираться, что не в порядке у этого крохотного ЛА.
Уронили мишку на пол,
Оторвали мишке лапу.
Все равно его не брошу –
Потому что он хороший.
Визуальный осмотр невооруженным глазом ничего не показал (ожидаемо). Но
dadget.ru
очень своевременно предоставил на тест “
портативный микроскоп
“.


И тут дело пошло гораздо веселее (и интереснее, поскольку никогда до этого не пользовался микроскопом для своих проектов в микроэлектронике).
Все последующие фото сняты микроскопом, никаким обработкам не подвергались (только масштабирование). Каждая фото — ссылка на полноразмерный оригинал изображения.
Одна из первых фотографий «материнской платы» квадрокоптера (для оценки возможностей микроскопа):

Сразу расскажу, что этот квадрокоптер построен по довольно оригинальной схеме: вся механическая часть («крестовина») совмещена с электронной частью («печатная плата»). Собственно, весь «скелет» квадрокоптера является печатной платой (ну или наоборот: печатная плата является «крестовиной»).
С одной стороны — это очень удобно: никаких лишних механических частей, но с другой — если вдруг проблемы с печатной платой (например, отломился один из «лучей») — квадрокоптер можно выбросить, поскольку нормально печатную плату восстановить скорее всего не удастся.
Но кто знает, вдруг, конкретно в этом случае повезло и удастся починить?
Начал пристально рассматривать «проблемный» луч и сразу обнаружил отсутствие одного из светодиодов (типоразмер 0603) — он просто отсутствовал, видимо, его просто целиком оторвало при ударе:

Так же вызывал сомнения (и не беспочвенно) светодиод в вершине «луча»:
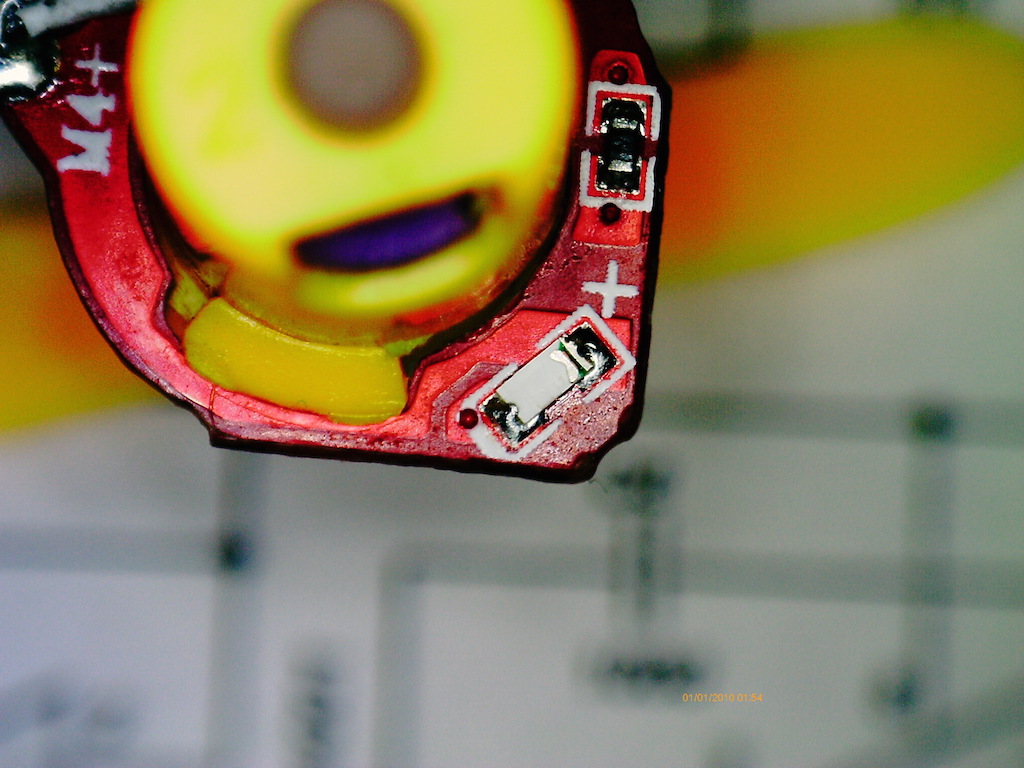
На фото видно, что от светодиода осталась только подложка. Сам кристалл и линза — отсутствуют.
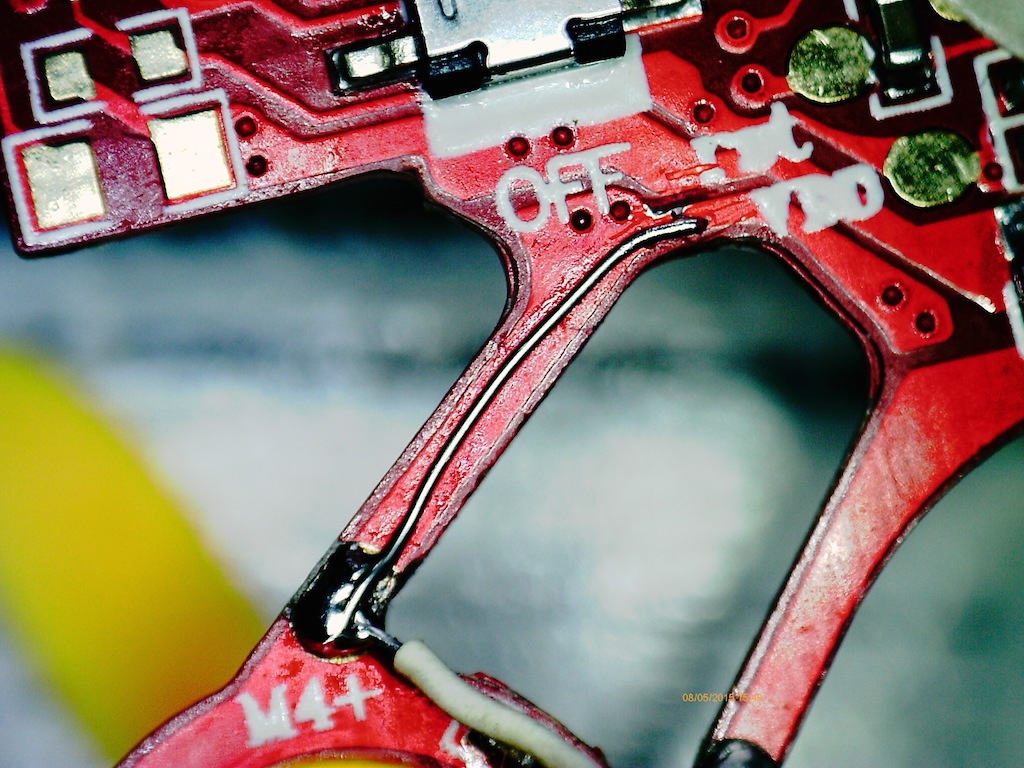
Со светодиодами разобрались, но ведь не это является главной проблемой. Нужно найти место микротрещины на луче в цепи питания соответствующего двигателя.
И опять микроскоп помог. Практически сразу вот это место вызывало сомнения:

После того как основная неисправность была локализована, ремонт стал уже «делом техники»: аккуратно убрал острым ножом часть паяльной маски, залудил «обнаженное» место и припаял тонкий проводок.
Светодиоды запаял на их законное место. Повезло, что пострадали именно красные «светики» и они были у меня в наличии (среди «сигнальных огней» еще есть синие — вот таких у меня не было и пришлось бы нарушить замысел производителя или отказаться от индикации на этом луче совсем).
Восстановленные светодиоды фотографировать не стал (никакой новой информации, просто проконтролировал качество их пайки).
После этих действий квадрокоптер «вернулся в строй» (функциональность полностью восстановилась). Видео с полетом «мухи» не будет — слишком резвая, телефоном за ней уследить практически не реально (и я пока не очень освоился с управлением для «медленных» перемещений, пригодных для съемки). Полет можно посмотреть, например, в этом видео.
Теперь замечания по поводу нового инструмента — портативного микроскопа:
- В целом, прибор понравился — просто, удобно, наглядно, доступно.
- Встроенный цветной экран позволяет оперативно рассмотреть мелкие детали, но экран все-таки мелковат и его удобно использовать в качестве грубого «видоискателя».
- При подключении к компьютеру (с соответствующим софтом, включен в комплект поставки) — есть возможность просматривать изображения непосредственно на экране компьютера (и тут уже размер отображаемого изображения ограничен только размерами монитора).
- Можно подключить практически к любому ТВ (через «тюльпаны») и использовать экран ТВ для просмотра.
- Встроенная в микроскоп система подсветки (8 белых матовых светодиодов и кольцеобразный рассеиватель) — хорошо справляются со своей задачей и существенно облегчают работу.
- «С рук» микроскопом пользоваться практически невозможно (очень малая глубина резкости, что ожидаемо), но увесистый металлический штатив в комплекте решает эту проблему.
- Можно получать как оригинальные изображения (цветные), так и черно-белые (два варианта: позитивное и негативное изображение — в некоторых случаях удобно пользоваться именно этими режимами, особенно когда надо прочитать маркировку микросхем, выполненную лазерной гравировкой).
- Есть возможность делать «таймлапс» (автоматическая серия фотографий через заданные промежутки времени) и снимать видео (фото и видео сохраняются на microSD карту (в комплект поставки не входит).
- Встроенный экран не блещет характеристиками (плохие углы обзора, «кислотные» цвета и на второй день использования появился «битый» пиксел).
- В описании заявлена поддержка русского языка, но в меню микроскопа его не нашлось (видимо, старая прошивка, но новую тоже найти не удалось). Мне не критично, но как есть.
- Богатый комплект поставки: микроскоп, зарядник, аккумуляторная батарея, чехол, A/V-кабель, USB-кабель, штатив, диск с ПО, салфетка из микрофибры.

Задачи, которые лично мне стало удобнее и проще делать с микроскопом:
Безопасных полетов вам. Берегите свои «игрушки».
Ошибка: «недостаточно силы/esc» и «максимальная достигнутая нагрузка»
Ошибка DJI Mavic: Power Load Reched и Not Enough Force/ESC error или Недостаточно Force/ESC предупреждение или ошибка о максимальной мощности нагрузки может быть довольно опасной.
Mavic Mini может даже сбросить высоту и даже разбиться. Во многих случаях дрон будет падать и восстанавливать свою позицию. Однако если вы летите очень близко от земли, Mavic может резко упасть. Это довольно страшно и вам повезет если ваш дрон не окажется поврежден.
Есть много причин которые могут вызвать эту проблему и на момент написания у DJI не было однозначного ответа или решения на это.
Однако многие владельцы сами решили эту проблему или поняли что может являться причиной.
Предупреждение заключается в том, что дрон не получает достаточного питания и на электронных контроллерах (ESC) генерируется сообщение об ошибке.
Это сообщение указывает на проблему с ESC (электронными регуляторами скорости) и двигателями.
Проблемы с питанием могут также указывать на неисправный аккумулятор. Тем не менее от DJI по этому поводу не получилось узнать ничего определенного.
Эта проблема может быть исправлена различными способами.
Рассмотрим на примере DJI Mavic Mini.
Максимальное сопротивление ветру — это проблема возникающая из-за того что квадрокоптер летает при ветре, превышающем 28,8 км/ч, что является максимальной скоростью ветра для дрона.
28,8 км/ч — это уровень 4 по шкале Бофорта, что означает умеренный ветер. Многие из этих предупреждений недостаточной силы/ESC происходят на приличной высоте. Несмотря на то, что на земле может быть спокойно, на высоте может быть ветер который может стать серьезной помехой для полета.
Читайте: Как летать на квадрокоптере при сильном ветре: Советы
Полет на полной скорости — если вы летите на полной скорости и если есть небольшой встречный ветер, это также может привести к ошибке. Двигатели при такой ситуации работают в максимальных режимах. Ослабьте газ и посмотрите, исчезнет ли предупреждение.
Очень быстрый подъем в P-режиме. Возникает ли проблема при быстром подъеме. Если это так, то это потому, что во время полета вверх дрон сталкивается с высоким сопротивлением и контроллер полета обнаруживает это выдавая всплывающее сообщение ESC о недостаточной мощности.
Максимальная высота полета — полет на максимальной высоте или близко к ней для. По мере набора высоты воздух становиться менее плотным (это связано с тем что гравитация притягивает к себе молекулы воздуха к земле). И на большой высоте двигатели беспилотников должны работать в более интенсивном режиме чтобы удерживать беспилотник в воздухе.
Читайте: На какую максимальную высоту может подняться квадрокоптер?
Защита винтов может вызывать проблему — Снимите защитные кожухи винтов, если они прикреплены. Некоторые пилоты решили эту проблему сняв защитные винты.
Читайте: Может ли квадрокоптер долететь до космоса и прилететь обратно?
Неисправные пропеллеры. Многие дроны Mavic Mini, получившие предупреждение «Недостаточно силы / ESC» и «Достигнута максимальная мощность нагрузки» были исправлены простой заменой пропеллеров. На рынке представлено много разных пропеллеров Mavic Mini.
Изучите пропеллеры. Даже если вы не видите какой-либо ошибки, идите вперед и измените их. Они могут быть небольшим дефектом одного или нескольких пропеллеров, что даже не заметно на глаз. Эта проблема была исправлена для многих владельцев путем перехода на новый комплект пропеллеров.
Некоторые пилоты замечали что лопасть пропеллера слегка трется о дрон. Поэтому, когда Mavic Mini выключен, раскрутите винты и посмотрите, происходит ли это.
Кроме того DJI рекомендует заменять полный набор а не только 1 пропел.
Неисправная батарея — Если у вас есть запасные батареи замените и посмотрите, появляется ли предупреждение Not Enough Force или Not Enough Power / ESC. Если ошибка пропадет то это может указывать на проблемы с аккумулятором.
Полет в режиме S или P — предупреждение появляется только в режиме S или P. Это один из вопросов, который всегда задает служба поддержки DJI и может указывать на то где по их мнению существует проблема. Если это происходит только в одном из режимов это может указывать на проблему с программным обеспечением, а не с оборудованием. Выполните обновление программы.
Обновите приложение DJI Fly — убедитесь, что у вас установлена последняя версия приложения DJI Fly. Как правило с новой прошивкой многие ошибки в программном обеспечении устраняются.
Понижение/обновление прошивки — предупреждение Not Enough Force/ESC неоднократно исправлялось, сначала понижая версию прошивки а затем обновляя ее снова.
Вы можете понизить версию прошивки с помощью приложения DJI Assistant 2 на своем компьютере. Если это устраняет проблему то проблема изначально была в поврежденной прошивке.
Пульт дистанционного управления отключается при полете
Если у вас нет управления вы не сможете управлять своим дроном, даже если сможете его увидеть. Ваш дрон должен запустить режим точки возврата Failsafe Return-To-Home, который он установил сразу после взлета.
Если дрон улетел на большое расстояние, вы можете помочь пульту дистанционного управления подключиться. Вот несколько советов.
Двигайтесь к своему квадрокоптеру, сокращая расстояние между пультом и дроном. Если вы находитесь рядом с работающим двигателем, генератором, линиями электропередачи и т. д., Это может ослабить сигнал, приводящий к отключению. Поэтому отойдите от любых помех в направлении дрона, и он может просто переподключиться.
Проверьте направление антенны пульта дистанционного управления. Направлена ли антенна в правильном направлении. Если дрон находится довольно высоко в воздухе, вам нужно изменить угол наклона пульта дистанционного управления, чтобы антенна была направлена прямо на него.
Выключите и снова включите пульт – стоит попробовать, так как это займет всего несколько секунд.
Возврат к домашнему безотказному режиму — если вы летите в широком открытом пространстве без каких-либо препятствий на пути. Режим RTH вернет квадрокоптер обратно в исходную точку. Это очень полезная функция особенность.
Советы по полетам на квадрокоптере
Откалибруйте компас — особенно если вы летите в новой области, которая находится на большом расстоянии от последнего места, где вы летали. Также выполните калибровку, если вы получили сообщение в приложении DJI Fly для калибровки. Обязательно откалибруйте компас после жесткой посадки и где нет физического повреждения дрону.
Не летайте — пока у вас слабый сигнал GPS.
Обновление прошивки — проверьте и обновите прошивку для дрона и пульта дистанционного управления. Кроме того, установите последнее приложение DJI Fly, когда оно станет доступным.
Электромагнитные помехи. Многие электромагнитные помехи могут вызвать проблемы с компасом квадрокоптера и возможностями полета, в том числе его точное местоположение в небе. Следите за электромагнитными помехами в той области, где вы будете летать.
Читайте: Как запускать квадрокоптер в городе с электромагнитными помехами?
ЭМП — это помехи, создаваемые одним электрическим устройством другому электромагнитными полями. Электромагнитные помехи (EMI), также называемые радиочастотными помехами (RFI) в радиочастотном спектре, представляют собой помехи, создаваемые внешним источником, который воздействует на другую электрическую цепь.
Примерами EMI являются линии электропередач, мачты сотовых телефонов, здания из армированной стали, электрические кабели, мосты, железнодорожные линии, автомобили и электрические устройства.
Статьи в тему:
Как запустить квадрокоптер. Только для начинающих пилотов: включение, калибровка, триммирование
Как научиться управлять квадрокоптером: советы и упражнения
Что нужно знать о пропеллерах для мультикоптера: терминология, материалы, балансировка
Для чего в квадрокоптере барометр или Как работает режим удержания высоты
Квадрокоптер с функцией «follow me»: дрон, который всегда рядом
«Headless mode»: что это такое, с чем его едят и нужен ли этот полетный режим в квадрокоптере


