

- Что такое ам32
- Advanced pilots’ mods
- Baseflight
- Betaflight
- Cleanflight
- Dronin
- Librepilot
- Manual mode (allows flips and barrel rolls)
- Max altitude
- Obstacleavoidance
- Openpilot
- Raceflight
- Remote- mode switch
- Sdk и комплекты
- Sport
- Taulabs
- Wind notices
- Возможные проблемы при запуске скрипта и решения
- Для чего используются
- Есть два уровня программирования
- Есть комплекты для обучения
- Железо дрона
- Закругляемся
- Как настроить приемник expresslrs в betaflight
- Как подключить приемник expresslrs к полетному контроллеру
- Как привязать приемник expresslrs
- Как прошить или обновить модуль и приемник expresslrs
- Как установить (прошить) am32 на blheli32 esc
- Какие уже были обновления?
- Когда необходима регулировка коптера
- Компиляция (сборка) прошивки приемника (rx) expresslrs
- Конфигуратор expresslrs
- Настройка expresslrs в opentx
- Настройка модуля expresslrs с помощью lua скрипта
- О системе
- Обновление прошивки пульта дистанционного управления mavic air 2 с помощью dji assistant 2
- Обновление прошивки mavic air 2 с помощью dji assistant 2
- Обновление прошивки: видео
- Опционально
- Особенности прошивки am32
- Подготовка (компиляция) прошивки expresslrs
- Пример 1: dji
- Пример 2: pixracer r14
- Примеры программирования дронов
- Профессиональная калибровка квадрокоптера
- Прошивка
- Прошивка / обновление expresslrs rx (приемник) через wi-fi
- Прошивка / обновление expresslrs tx через uart
- Прошивка / обновление expresslrs tx через wi-fi
- Прошивка / обновление приемника expresslrs через betaflight passthaught
- Прошивка mavic air 2 v01.00.0113 — дата 2020.04.28
- Прошивка mavic air 2 v01.00.0130 — дата 2020.05.09
- Типы бпла
- Установка обновлений прошивки квадрокоптера dji mavic через assistant 2
- Чем занимается полетный контроллер
- Языки и среды разработки
- Заключение
Что такое ам32
Все привыкли, что для регуляторов оборотов (ESC) используется программное обеспечение под названием BLHeli32 или BLHeli_S. Если последняя была бесплатной, то для использования BLHeli32, производителям нужно покупать лицензию, если они собираются продавать готовые комплекты дронов.
BLHeli_S использовался для ESC на 8-битных микроконтроллерах, а BLHeli32 уже на 32-битных. Но всему есть конец и BLHeli32 тоже исчерпала свои аппаратные возможности, точнее, не умеет работать на усовершенствованных ESC.
Поэтому, на смену BLHeli32 приходит прошивка с открытым исходным кодом (бесплатная для всех) под названием АМ32 от разработчика Питера Смита (он же AlkaMotors или Peter Smith).
Advanced pilots’ mods
Внимание! Данные параметры можно менять только в том случае, если вы понимаете, что делаете. Если бездумно тут что-то изменить — можно сломать свой дрон.
Baseflight
Baseflight — это одна из первых широко используемых прошивок для 32-битных ПК, основанная на 8-битной прошивке для ПК Multiwii. В наше время, Baseflight не обновляется и считается мертвой прошивкой. Несмотря на все споры и слухи относительно автора прошивки, TimeCop, развитие BaseFlight привело нас к появлению других отличных прошивок, которые мы используем по сей день, так что она заслуживает упоминания.
Betaflight
Betaflight — форк Cleanflight для того чтобы внедрять все самые новые функции и идея, поэтому и название Beta-flight. Сегодня это, пожалуй, самая популярная прошивка для полетных контроллеров, причин этому довольно много. Она поддерживает большое число ПК, настройки по умолчанию позволяют хорошо летать, функционал удовлетворит как профессионального гонщика, так и фристайлера и даже новичка.
Благодаря обилию настроек, это одна из самых гибких и функциональных прошивок, но при этом она довольно сложна в настройке, изучении и использовании.
Cleanflight
Это форк (отдельная ветка развития) Baseflight, цель — сделать код Baseflight более чистым, для упрощения поддержки и дальнейшего развития. Благодаря надежности, быстро завоевала популярность, часто используется и в наши дни. Практически с самого начала было разделение на Betaflight и iNav.
Dronin
Последняя, но не самая плохая в этом списке — dRonin, это по сути внучка OpenPilot. Регулярные обновления, открытый исходных код, команда разработчиков, старающаяся улучшить характеристики для гонок или для акро полетов, есть в этой прошивке потенциал.
Они разработали режим автонастройки, который помогает настроить PID коэффициенты для вашего миникоптера, кроме того, имеется очень простой и легкий в использовании мастер настройки. Единственный недостаток — не все ПК поддерживаются, но те что поддерживаются — имеют отличные отзывы.
Librepilot
LibrePilot — это форк OpenPilot, основное внимание уделено исследованиям и разработке для применения в различных областях, даже в робототехнике. Хотя она и не так популярна у пилотов миникоптеров, и не поддерживает многие ПК (в отличие от других прошивок в этом списке), но как показывают последние обновления, у нее есть отличная команда разработчиков и проект все еще остается с открытым исходным кодом.
Manual mode (allows flips and barrel rolls)
Change your “Sport” mode -switch to unassisted “Manual” mode. Fly only on open-area you are confident to train on. Idle is 50% and the drone will climb if you don’t respond with throttle down. This is essentially a RC-helicopter mode which traditionally have no FC/IMU and is solely defendant on pilot skill.
When switching back to “Normal” mode, make sure that the drone is right way up and is not tipped over it’s horizontal or vertical axis. Failing to abide this will calibrate your IMU with the drone wrong way up and it will not automatically flip over.
| Parameter-Key | Description | Value | Notes |
|---|---|---|---|
| g_config_control_control_mode[1] | “Switched” | 0 | 0 = Manual Mode (GPS position and Altitude Stabilization are disabled) |
| g_config_control_control_mode[2] | “Normal” | 7 | 7 = PGPS Mode (Normal) |
1)Warning: Do not change brake_sensitive_gain = 130 to 70 like it says on some websites unless you are a very confident pilot, it takes up to 3 metres(9 feet) to stop
Max altitude
Увеличение высоты полета
| Parameter-Key | Description | Value |
|---|---|---|
| g_config_flying_limit_height_limit_enabled | Enabled? Y=1/N=2 Not visible in Assistant on recent FWs | 2 |
| g_config_flying_limit_limit_height_abs_without_gps | Maximum local limit with no GPS signal. | 3000 |
| g_config_flying_limit_limit_height_abs | Maximum local limit. | 3000 |
| g_config_flying_limit_limit_height_rel | Maximum limit relative to takeoff? | 3000 |
Obstacleavoidance
Увеличение дистанции на которой дрон будет облетать препятствия
| Parameter-Key | Value |
|---|---|
| g_config_control_avoid_atti_range | 23 |
| g_config_avoid_obstacle_limit_cfg_safe_dis | 3 |
Openpilot
Одна из первых прошивок с открытым исходным кодом для коптеров, благодаря ей были внесены существенные изменения и в другие прошивки. OpenPilot не развивается с 2023 года и ее роль теперь выполняет LibrePilot.
Raceflight
Изначально это был форк Betaflight/Cleanflight, развитие было направлено на гонки, акробатику и на поддержку ПК на F4. Затем разработчики закрыли доступ к исходному коду, и после некоторых споров, которые не важны в контексте этой статьи, выпустили Raceflight One для собственного ПК Revolt.
У Raceflight очень дружественный пользовательский интерфейс, по моему мнению, это наиболее легкий в освоении софт.
Remote- mode switch
| Parameter-Key | Description | Factory Value | Notes |
|---|---|---|---|
| g_config_control_control_mode[1] | “Switched” | 8 | 0 = Manual Mode (GPS position and Altitude Stabilization are disabled) 1 = GPS — no noticed difference 2 = GPS — no noticed difference 3 = ATTI Mode (Altitude Stabilization) 4 = GPS mode indicated, sport mode speed for some reason 5 = GPS — no noticed difference 6 = Beginner 7 = PGPS Mode (Normal) 8 = Sport Mode 9 = FARM Mode (Altitude stabilization with RTH capability) 10 = GPS — no noticed difference 11 = GPS — no noticed difference 12 = Tripod mode |
| g_config_control_control_mode[2] | “Normal” | 7 | Same notes as above |
| g_config_control_control_mode[0] | “Tripod” | 12 | Same notes as above. Third position on some RCs like Mavic |
Sdk и комплекты
Понятно, DJI — не единственный пример. SDK есть у Parrot, 3DR, Skydio, Yuneec (правда 3DR, Yuneec и Parrot работают с open-source-платформами, о них мы поговорим далее).
По сути сейчас мы наблюдаем процесс формирования целого рынка программного обеспечения для таких программируемых дронов.
Некоторое ПО, в т.ч. на DJI (несмотря на то, что он не open-source) можно найти на GitHub.
Кстати, образовательные решения тут тоже есть. Например, тот же DJI выпускает специальный комплект из нескольких дронов, рассчитанный на обучение целой группы студентов программированию на Scratch, Python и Swift.
Помимо проприетарных, есть множество DIY-решений, основанных на популярных универсальных полетных контроллерах. Откровенно говоря, DIY-сообщество в свое время и стало родоначальником всего рынка управляемых дронов. Компании с рынка радиоуправляемых моделей взялись за разработку БПЛА лишь тогда, когда идея стала популярна в народе и можно было построить какие-то бизнес-прогнозы.
DIY-решения обычно опираются на какую-то из доступных систем управления (автопилотов), например Ardupilot или Pixhawk. А контроллер подбирается из списка поддерживаемых для выбранного автопилота. Впоследствии его можно даже доукомплектовать оборудованием (если прошивка позволяет это сделать). Под такие решения есть свои универсальные платформы разработки, например MAVSDK (его поддерживают 3DR, Yuneec и Parrot).
По аналогии с 3D-принтерами некоторые производители выпускают кит-комплекты для DIY дронов. К примеру, в упомянутом выше хакатоне ребята работали с дронами «Иволга» отечественного производства. Есть и другие примеры, например, Ardupilot, как производитель, предлагает на рынке собственные наборы, цена на которые варьируется в зависимости от комплектации.

Пример комплекта с Aliexpress
На базе open source контроллеров встречаются и промышленные решения.
Начиная с самосборных решений под управлением готового автопилота, некоторые энтузиасты переходят к разработкам собственного автопилота. Так мир open source в этой части постоянно расширяется. Однако это задача не для новичка. Поскольку суть заключается не столько в самом программировании, сколько в решении инженерных задач.
Sport
Увеличение производительности Sport режима
| Parameter-Key | Description | Value |
|---|---|---|
| g_config_mode_sport_cfg_tilt_atti_range | Maximum tilt(tilt=speed) | 45 |
| g_config_mode_sport_cfg_vert_vel_up | Max speed you gain altitude | 8 |
| g_config_mode_sport_cfg_vert_vel_down | Max speed you lose altitude | -10 |
| g_config_mode_sport_cfg_vert_acc_up | Max speed you accelerate in gaining altitude | 8 |
| g_config_mode_sport_cfg_vert_acc_down | Max speed you accelerate in losing altitude | -10 |
Taulabs
TauLabs — еще один форк OpenPilot, развивается в сторону исследований и разработки БПЛА. Нацелена на профессионалов, исследователей и студентов, эта прошивка подходит не только для серьезных исследователей, но также предлагает платформу начального уровня с быстрой настройкой для любой группы, использующей БПЛА в своих исследованиях.
И опять, список поддерживаемых ПК довольно сильно ограничен, далеко не все ПК подойдут для миникоптеров. По-моему, это отличная прошивка для обучения, для студенческих проектов или для того чтобы поэкспериментировать с сельским хозяйством, изучением качества воздуха или со всем тем, до чего вы сами додумаетесь.
Wind notices
Убирает предупреждение о сильном ветре в приложении GO App
| Parameter-Key | Value |
|---|---|
| g_config_air_est_big_wind_level1 | 25 |
| g_config_air_est_big_wind_level2 | 25 |
Возможные проблемы при запуске скрипта и решения
Если сценарий LUA показывает на экране только сообщение «Connecting…», это значит, что LUA не взаимодействует с передатчиком.
Возможные причины и способы решения этой проблемы:
- Модуль неправильно подключен к отсеку для внешнего модуля JR . Попробуйте переустановить модуль в отсек / корпус JR. На работающем модуле должен гореть красный светодиод.
- Вы используете версию OpenTX старше 2.3.12. Нужно обновиться как минимум до 2.3.12 версия для того, чтобы ExpressLRS мог работать.
- Вы не установили для External RF значение CRSF в настройке модели. Перейдите к настройке модели и проверьте настройки. Внутренний приемник (Internal RF) должен быть выключен.
- Передатчик находится в режиме обновления WiFi . Чтобы запустить модуль ExpressLRS в нормальном режиме, необходимо выключить и снова включить аппаратуру управления.
Если скрипт LUA показывает предупреждение об ошибке: «!!! VERSION MISMATCH !!!«(несоответствие версий), это означает, что вам необходимо обновить прошивку модуля TX.
Для чего используются
Конструкция определяет возможное применение. Сфер, где успели «засветиться» беспилотные летательные аппараты уже довольно много. Даже если говорить только о «гражданских» машинах (не ориентированных на военных или спасателей), это:
Применение беспилотника во многом определяется тем, какую полезную нагрузку он способен нести: может ли поднять посылку с грузом или вынужден ограничиться экшн-камерой.
Есть два уровня программирования
Если рассуждать о глубине погружения в тему программирования беспилотных летательных аппаратов, можно выделить два «уровня»:
- Планирование и закладка в аппарат полетного плана для готового решения, а также последующий контроль его исполнения. Этот уровень позволяет решать множество очень интересных задач, хотя и ограничен возможностями используемой платформы;
- Создание собственной системы управления — своего рода «системное программирование» в мире БПЛА.
На Хабре любят DIY и тут довольно много рассказов о деталях второго уровня (например
), в то время как первый до сих пор охвачен слабо. В основном обсуждают детали программирования в определенном SDK или сравнивают аппараты, что понятно лишь тем, кто в теме. Так что далее будем говорить именно про первый уровень.
Программирование под готовые платформы выводит летательные аппараты далеко за рамки класса «игрушек». Это полноценная разработка, которая просто использует библиотеки и функции автопилота для серийно выпускаемого дрона (или для open source полетного контроллера), так что создатель программы может сосредоточиться на решении своей задачи, будь то аэрофотосъемка или воздушные световые шоу.
Самое важное: программирование позволяет снять с оператора часть задач по управлению в режиме реального времени, что на самом деле упрощает применение БПЛА. Не у каждого любителя фотосъемки найдется время и желание учиться пилотировать дрон в сложных условиях.
Есть комплекты для обучения
Доступность обучающих комплектов уже потянула за собой массовое появление как кружков по работе с дронами, так и всевозможных мероприятий — семинаров, мастер-классов, олимпиад.

Обучающий набор DJI EDU
Например, в конце января в Точке кипения Омского технического университета (ОГТУ) проходил хакатон, посвященный программированию дронов.

Один из организаторов хакатона — Александр Голунов — помогал нам в подготовке этого поста
Любопытно, что до мероприятия ребята, принимавшие в нем участие, не были знакомых с беспилотниками. Некоторые из них увидели дрон вживую первый раз в жизни. Но после знакомства — блочной сборки, настройки, калибровки БПЛА, а также построения виртуального полетного плана — они смогли предложить новые способы применения дронов в быту. Как бы это о том, что ничего сложного тут, в целом, нет.
Железо дрона
С точки зрения железа дрон состоит из:
- рамы, на которой крепятся агрегаты и защитный кожух. Последний, кстати, присутствует не всегда, но какая-то защита движущихся частей аппарата, а заодно и окружающих от удара этими движущимися частями, есть почти везде;
- необходимого количества роторов;
- аккумулятора;
- набора датчиков. Самый простой дрон может летать с трехосевым акселерометром, но управлять им будет сложно. Заметно упрощают этот процесс: трехосевой акселерометр, трехосевой датчик угловой скорости (ДУС), барометр и магнитометр. Также в списке датчиков могут присутствовать: компас, гироскоп, GPS или приемник любой другой системы глобального позиционирования;
- модуля связи. Это может быть радиосвязь с пультом управления (наземной станцией) или 4G-модем для получения команд и отправки телеметрии через интернет;
- полезной нагрузки, например камеры на подвесе, сонара, дальномера и т.п.;
- сердца дрона — полетного контроллера, который всем этим управляет.
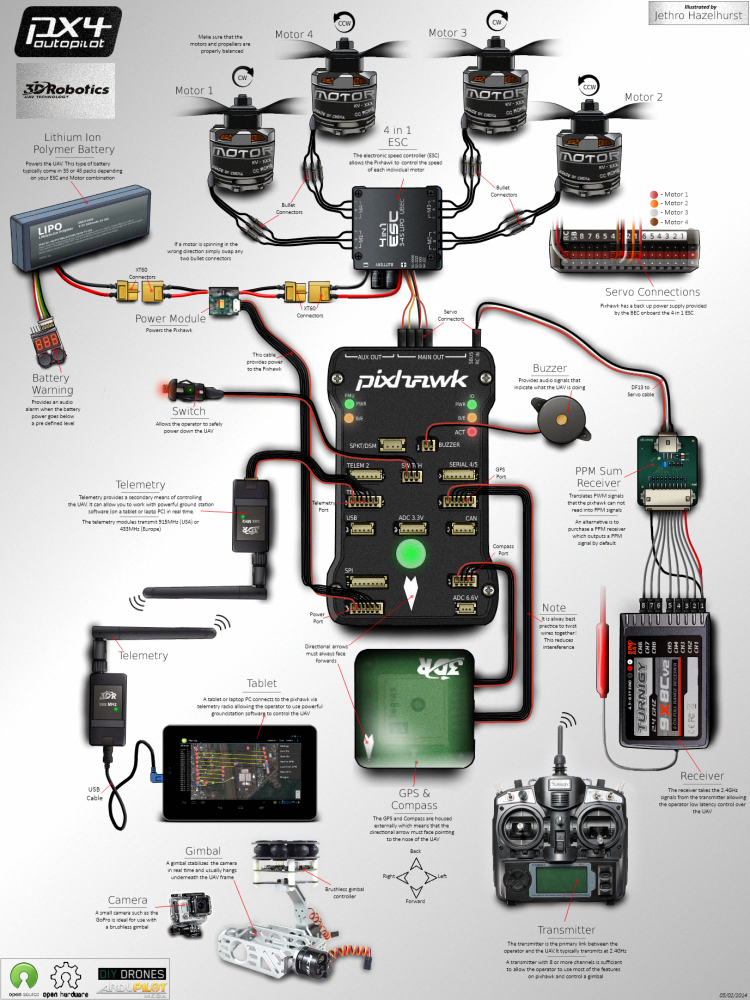
Пример состава оборудования программируемого дрона с полетным контроллером pixhawk
Закругляемся
Как и большинство вещей связанных с нашим хобби, все относительно и сильно связано с кривой обучения. Прошивки определяют то, что вы сможете сделать со своим коптером, какие функции он будет иметь, и какой полетный контроллер вам нужно будет купить, чтобы максимально раскрыть потенциал.
Сделайте домашнее задание (у вас уже всё не плохо, раз прочитали эту статью :)) и выясните какие именно функции нужны, что именно вы собираетесь делать с коптером.
Как настроить приемник expresslrs в betaflight
Тут тоже все просто, открываем Betaflight и выбираем последовательный приемник и ниже кросфайр:
Как подключить приемник expresslrs к полетному контроллеру
Эти приемники используют протокол CRSF для обмена данными с полетным контроллером.
Поэтому приемники должны подключаться так же, как приемники TBS Crossfire.
Любая схема подключения приемника Crossfire подходит и для приемника ExpressLRS. Более того, приемники эти имеют ту же распиновку, что и приемники TBS Crossfire Nano, поэтому их можно напрямую установить (припаять) на плату ПК или платы адаптера, как и у TBS Crossfire Nano RX.
Общая схема для подключения приемника:
Как привязать приемник expresslrs
Приемники можно связать двумя способами — автоматически при использовании одной и той же фразы связывания или обычным способом, переведя TX (передатчик) и RX (приемник) в режим связывания.
Приемник автоматически связывается с модулем передатчика, если оба модуля TX и RX прошиты с одной и той же фразой привязки. Можно задать свою фразу в конфигураторе, об этом в начале руководства.
Вам необходимо скомпилировать и обновить прошивку для TX и RX с одной и той же связывающей фразой. Не нужно использовать опцию привязки в сценарии Lua ELRS, TX и RX должны связываться автоматически.
В качестве альтернативы вы можете привязать любой приемник ExpressLRS к любому передатчику ExpressLRS, переведя оба устройства в режим привязки.
Для этого нужно включить и выключить приемник 3 раза и он перейдет в режим привязки.
Модуль передатчика можно перевести в режим привязки, выбрав опцию [Bind] в скрипте ERLS Lua.
На некоторых передатчиках есть кнопка Bind, что упрощает перевод в нужный режим.
Как прошить или обновить модуль и приемник expresslrs
Существует несколько способов прошивки ExpressLRS в модулях TX (передатчик) и RX (приемники). Это зависит от оборудования, которое вы используете и его возможностей — есть ли у него USB-разъем, есть ли чип WiFi ESP32 и так далее.
- Для модуля TX (передатчик) доступны методы по WiFi и через UART.
- Для модулей RX (приемники) доступны методы через BF, по WiFi и через UART.
Если TX или RX имеет на борту чип ESP, то доступно обновление по WiFi. Если модуль TX имеет разъем USB, тогда доступен метод обновления UART. Любой приемник может быть обновлен с помощью последовательной передачи BF или метода обновления UART.
Как установить (прошить) am32 на blheli32 esc
Прошивка AM32 совместима с большинством 32-битных регуляторов BHLeli32, но проблема в том, что регуляторы BLHeli32 обычно заблокированы и их нельзя просто так обновить на AM32. Чтобы записать AM32 в ESC BLHeli32, нужно разблокировать MCU — стереть все содержимое MCU, процесс необратим. После этого нельзя будет вернуть BLHeli32.
После того, как вы удалили прошивку BLHeli32, необходимо прошить загрузчик с помощью программы STLink.
Какие уже были обновления?
Всегда интересно читать список исправлений в обновлении, а также список нововведений. Для ознакомления ниже представлен список прошивок, которые вышли некоторое время назад:
Когда необходима регулировка коптера
Обновление через мобильное приложение выполняется аналогично софту для ПК. Вам нужно подключить устройства к смартфону (коптер и его пульт) и дождаться, пока утилита проверит наличие новых версий ПО. После этого нужно будет выбрать пункт «Обновить сейчас», дождаться загрузки и нажать на «Запустить обновление», когда кнопка станет активной. Эта процедура полностью аналогична для дрона и его пульта.
Если вы заметили, что в ходе прошивки квадрокоптера DJI Mavic Pro что-то пошло не так, лучше сделать откат – даунгрейд. Речь идет о нестабильной работе мотора, неправильном переключении режимов и проблемах с регулятором скорости – в такие ситуации владельцы коптеров попадают достаточно часто.
Для начала стоит трезво оценить свои возможности. Причем мы говорим даже не об умении управляться с техникой, а о временном ресурсе, которого многим сегодня не хватает. Если вы собираетесь перепрошивать коптер впервые, то учтите, что меньше пары часов работа у вас совершенно точно не займет, т.к. кроме прошивки квадрокоптера нужно обновить также приложение и ПО на пульте.
Вот основные моменты, которые стоит принять во внимание:
- Скачивайте прошивку только с официальных источников.
- Перед началом перепрошивки убедитесь, что батарея заряжена хотя бы наполовину.
- Не забудьте обновить прошивку пульта управления. Она выполняется только после того, как была произведена перепрошивка квадрокоптера.
- Стабильный интернет — ваш лучший друг во время обновления ПО.
- Убедитесь, что ваша карта формата FAT32 и не содержит ничего, кроме свежей версии прошивки.
Существует ошибочное мнение, что правильно настроенный аппарат не нуждается больше в регулировке. А также, что каждый новый квадрокоптер – настроен правильно. Оба этих утверждения в корне не верны. Конечно, проводить настройку регуляторов летательного аппарата перед каждым полетом вовсе не обязательно. Но сделать ее необходимо в следующих случаях:
- При покупке нового квадрокоптера – перед его использованием;
- При изменении конфигурации аппарата, замене или установке новых элементов;
- При перемещении GPS-модуля;
- Если у квадрокоптера нарушена стабилизация;
- После падения или ремонта.
Обычно прошивка аппарата выполняется в тех случаях, когда сделать его качественную калибровку обычным образом не удается. Также мы рекомендуем ее проводить при появлении новых версий прошивок от производителя, так как в них обычно исправлены недочеты и ошибки, допущенные ранее. Ваш квадрокоптер при этом станет функциональнее и проще в управлении.
Компиляция (сборка) прошивки приемника (rx) expresslrs
Шаг 1. Здесь все аналогично. Выбираем свой приемник и тип прошивки:
Шаг 2. После выбора устройства, нужно включить такие настройки:
Расшифровка значений:
USE_500HZ — включает скорость обновления 500 Гц (эта опция удалена в более поздних версиях)
HYBRID_SWITCHES_8 — включает использование 3 и 6-позиционных переключателей (по умолчанию система передает только двухсторонние (On-Off) переключатели в данных канала).
ENABLE_TELEMETRY — включает дополнительную телеметрию, такую как напряжение аккумулятора, ток, данные GPS, режим полета (базовая телеметрия, такая как RSSI, качество связи, передается всегда)
AUTO_WIFI_ON_INTERVAL — включает автоматический запуск обновления WiFi при запуске. Значение тайм-аута можно настроить (по умолчанию 40 секунд).
Конфигуратор expresslrs
У протокола для конфигурации систем на которой он работает, есть свой конфигуратор.
Настройка expresslrs в opentx
Система использует последовательный протокол CRSF для связи между радиопередатчиком и модулем. Чтобы установить протокол CRSF, перейдите к настройкам выбранной модели, на вкладке Model Setup включите External TX и выберите CRSF в качестве протокола:
Настройка модуля expresslrs с помощью lua скрипта
Все изменения в конфигурации модуля можно делать с помощью LUA скрипта.
О системе
ExpressLRS разработал Alessandro Carcione (AlessandroAU), у него получилось добиться максимальной дальности передачи и приема сигнала и при этом все работает с очень маленькой задержкой благодаря оптимизированным пакетам данных, которые передаются для обмена между оборудованием.
Небольшой недостаток: есть только базовая телеметрия, которая включает в себя VBAT, нисходящий/восходящий LQ и нисходящий/восходящий RSSI, но уже ведутся работы для поддержки полной телеметрии.
Посмотрите на картинку ниже, здесь вы можете сравнить систему с CrossFire и убедиться в значительном отличии задержек:
Обновление прошивки пульта дистанционного управления mavic air 2 с помощью dji assistant 2
Обновление пульта управления квадрокоптера состоит из следующих шагов:
- Включите пульт дистанционного управления Mavic Air 2;
- Подключите пульт к компьютеру с помощью USB-кабеля;
- Откройте программу DJI Assistant 2 на своем компьютере и войдите в систему;
- Выберите «Пульт управления Mavic Air 2» (RC for Mavic Air 2);
- Нажмите «Обновление прошивки» (Firmware Update) в левом верхнем углу Assistant 2;
- Нажмите «Обновить» (Upgrade) для последней версии прошивки Mavic Air 2;
- Нажмите «НАЧАТЬ ОБНОВЛЕНИЕ» (START UPDATE);
- На следующем экране вы увидите обновление прошивки пульта управления вместе с индикатором выполнения;
- Когда будет 100 процентов, вы увидите зеленую галочку и сообщение «Обновление успешно» (Update Successful);
- Перезапустите пульт управления.
Обновление прошивки mavic air 2 с помощью dji assistant 2
Обновление состоит из следующих шагов:
- Включите квадрокоптер Mavic Air 2;
- Подключите Mavic Air 2 к компьютеру с помощью USB-кабеля;
- Откройте программное обеспечение DJI Assistant 2 на компьютере и войдите в систему;
- Выберите ваш Mavic Air 2;
- Нажмите на кнопку «Обновление прошивки» (Firmware Update) в левом верхнем углу приложения Assistant 2;
- Нажмите «Обновить» (Upgrade) для последней версии прошивки;
- Нажмите «НАЧАТЬ ОБНОВЛЕНИЕ» (START UPDATE);
- На следующем экране вы увидите обновление прошивки Air 2 вместе с индикатором выполнения;
- Когда будет 100 процентов, вы увидите зеленую галочку и сообщение «Обновление успешно» (Update Successful);
- После завершения Air 2 автоматически перезагрузится.
Обновление прошивки: видео
Чтобы вам было еще проще обновить квадрокоптер, ниже разместим видео на русском языке по обновлению:
Опционально
Предлагаю вам DJI Assistant 2 1.1.2 — старая версия, в которой возможно включить дебаг режим для управления многими скрытыми настройками прошивки дрона, такими как скорость полета.
Особенности прошивки am32
- Обновление прошивки через Betaflight Passthrough — поддерживаются только G4, F4 и F7 полетные контроллеры. Нужно, чтобы прошивка Betaflight была последней версии перед использованием passthrough.
- Servo PWM, DShot300, DShot600, DShot1200 и ProShot
- Двунаправленный DShot
- Стандартная телеметрия ESC KISS
- Регулируемая частота PWM
- Синусоидальный режим запуска, предназначенный для разгона больших двигателей.
- Перезапуск при встрече с «призрачными ветками» (когда вы не видели ветки и врезались в них) и защита ротора
- Прошивка с открытым исходным кодом
Основная проблема с прошивкой AM32 заключается в отсутствии стандартных ESC с предустановленной прошивкой AM32. Это может измениться с выпуском Skystars KM55A — первого на рынке регулятора 4 в 1 с предустановленным AM32.
Подготовка (компиляция) прошивки expresslrs
Шаг 1. Загрузите и установите конфигуратор.
Пример 1: dji
Для программирования проприетарного дрона DJI необходимо
девелоперский аккаунт.
Пример 2: pixracer r14

Pixracer — одно из поколений полетного контроллера Pixhawk, который широко используется в DIY-проектах.
Примеры программирования дронов
Учитывая разнообразие решений на рынке, мы не имеем возможности рассказать о всех вариациях в программировании дронов, но покажем, как это происходит на паре примеров.
Профессиональная калибровка квадрокоптера
Наша компания предлагает услугу по настройке многовинтовых летательных аппаратов любого назначения. В зависимости от сферы использования, наши специалисты выполнят настройку квадрокоптера таким образом, чтобы он был максимально отзывчивым и удобным для решения поставленных задач. Обычно услуга включает:
- Настройку электроники и аппаратуры управления;
- Настройку компаса, акселерометра и других датчиков;
- Настройку регуляторов скорости двигателей;
- Регулировку отзывчивости джойстиков (пульта управления);
- Прошивку или перепрошивку аппарата (в случае необходимости).
Правильно выполненная настройка квадрокоптера делает его максимально управляемым в любом режиме полета.
Прошивка
Для того, чтобы все нормально заработало надо откатить прошивку дрона DJI Spark до стоковой версии V01.00.0900. Это можно сделать через тот же DJI Super-Patcher.
Запускаем скрипт и следуем инструкции на экране. Если вкратце то нам потребуется убедиться, что дрон подключился, выбрать откат на стоковую прошивку и в программе думлдор прошить дрон 2 (!) раза.
После этого потребуется в той же проге включить режим ADB на дроне.
Далее выбираем параметры, которые хотим включить в нашу кастомную прошивку и ждем когда закончится магия.
Перезапускаем дрон и радуемся полетам без ограничений!
Чтобы убедиться, что вы прошились успешно — перейдите в раздел about дрона в программе DJI GO 4 и проверьте версию установленной прошивки. Должно быть N/A на версии андроид.
Прошивка / обновление expresslrs rx (приемник) через wi-fi
Обновление приемника через Wi-Fi все также самый удобный способ.
Шаг 1. Сначала нужно перевести приемник в режим обновления WiFi. Для этого необходимо включить приемник без включения аппаратуры. Приемник перейдет в автоматический режим обновления через 40 секунд (настраивается в строке AUTO_WIFI_ON_INTERVAL).
Шаг 2. Затем подключитесь к сети Wi-Fi под названием «ExpressLRS RX Module«. Пароль сети Wi-Fi — «expresslrs».
Прошивка / обновление expresslrs tx через uart
Если вы выбрали прошивку через «_via_UART», то можете сразу нажать кнопку [ BUILD & FLASH ], чтобы собрать и прошить модуль. Перед этим шагом модуль передатчика должен быть подключен к ПК через USB-кабель.
Конфигуратор соберет прошивку, а затем автоматически обнаружит последовательный порт, модуль передатчика должен быть подключен. Как только все будет собрано и порт обнаружен, начнется автоматическая прошивка.
Если сборка и прошивка прошли успешно, вы увидите это:
Если конфигуратор не «увидит» модуль, то будет такая ошибка:
Для исправления проверьте подключение, а затем в ручную выберите нужный порт. Чтобы узнать какой назначен порт, откройте Диспетчер устройств и найдите подключенное устройство:
Выбрать порт нужно в самом низу программы:
Прошивка / обновление expresslrs tx через wi-fi
Обновление через WiFi самый удобный способ прошивки и обновления.
Шаг 1. Сначала вам нужно перевести передатчик в режим обновления WiFi. Перейдите к скрипту ELRS Lua на передатчике, долго зажав SYS (кнопка системных настроек).
Шаг 2. Затем подключитесь к сети Wi-Fi под названием «ExpressLRS TX Module«. Пароль сети Wi-Fi — «expresslrs«. Не путайте с сетью Wi-Fi «ESP WiFiManager» — это чип ESP, создающий свою сеть точек доступа и в настоящее время (начиная с версии прошивки 1.0) не используется. Подробнее об этой сети ниже в примечаниях.
Прошивка / обновление приемника expresslrs через betaflight passthaught
Если вы выбрали прошивку » _via_BetaflightPassthaught», то вы можете сразу нажать кнопку [ BUILD & FLASH ], чтобы собрать прошивку и прошить приемник. Перед этим приемник должен быть подключен к полетному контроллеру, а полетный контроллер должен быть подключен к ПК через USB-кабель.
После этого начнется процедура сборки прошивки, поиска порта полетного контроллера и перевода его в режим Betaflight Passthrough.
Если все пройдет удачно, будет знакомое окно:
Прошивка mavic air 2 v01.00.0113 — дата 2020.04.28
- Добавлен FocusTrack. чтобы включить FocusTrack, перетащите рамку вокруг объекта в поле зрения камеры;
- Добавлен режим HDR Video;
- Добавлен режим SmartPhoto;
- Добавлены путевые точки для Hyperlapse;
- Добавлено разрешение 8K для Free и Waypoints в Hyperlapse;
- Увеличена максимальная дальность передачи до 10 км.
Прошивка mavic air 2 v01.00.0130 — дата 2020.05.09
- Исправлена ошибка, когда видео записывалось на квадрокоптер неправильно;
- Оптимизирован Smart RTH (возврат домой).
Типы бпла
Исторически сложилось так, что беспилотники классифицируют по исполнению — самолетному и мультироторному. Мультироторные можно разделить по количеству винтов: монокоптеры, квадрокоптеры, гексакоптеры и т.д. Такие БПЛА получили широкое распространение, поскольку им не нужны дополнительные устройства для взлета и посадки.
Установка обновлений прошивки квадрокоптера dji mavic через assistant 2
Обновление должно выполняться только после того, как на вашем компьютере будет установлена новейшая версия фирменного ПО. При этом стоит учесть, что приложение позволяет обновлять как сам коптер, так и его пульт управления, а использовать его можно для обеих задач сразу.
Для того чтобы установить новое ПО в DJI Mavic Pro, вам потребуется соединить его с компьютером по USB-проводу и запустить. В приложении параллельно следует авторизоваться и выбрать вкладку «Обновление прошивки». Здесь вам нужно нажать на кнопку «Обновить», дождаться завершения скачивания файлов и проследить за установкой нового софта, которая начнется в автоматическом режиме.
Аналогично подключается и пульт управления DJI Mavic. Для старта загрузки ПО вам также потребуется нажать кнопку «Обновить» в соответствующем разделе приложения. Если вы проводите операции сразу и для пульта, и для дрона, то их нужно подключить друг к другу. В противном случае (при раздельном обновлении) в этом нет смысла.
Если вы не хотите, чтобы прошивка квадрокоптера DJI Mavic Pro завершилась некорректно, следуйте следующим правилам:
- Начинать апгрейд можно только на заряженных устройствах, поскольку сбои могут начаться при уровне заряда менее 25% для пульта и менее 30% для дрона.
- Вам необходимо стабильное интернет-соединение, поскольку скачивание обновлений при отключении от сети будет отменяться и вам нужно будет переподключать коптер к ПК.
- Если вы столкнулись с невозможностью обновления софта, лучше сразу обратиться к профессионалам для прошивки квадрокоптера – так вы точно ничего не повредите.
Чем занимается полетный контроллер
Насколько легко или сложно управлять конкретным дроном, в том числе и программировать его, определяет полетный контроллер и его программное обеспечение. Именно на него ложится задача управления физикой полета. Благодаря контроллеру оператору достаточно знать только базовые понятия и определения, и нет необходимости защищать докторскую по аэродинамике, чтобы совершить первый полет.
Контроллер решает классические задачи по:
- ориентации беспилотника вокруг его центра масс;
- ориентации центра масс беспилотника в пространстве;
- движению БПЛА по маршруту;
- избежанию коллизий с другими беспилотниками, если это групповой полет, или с иными объектами. Например, есть много разработок безопасных дронов, которые не сталкиваются с людьми, — все зависит от конкретной задачи;
- управлению полезной нагрузкой — камерой, захватами для груза и т.п.;
- передаче информации, в частности, приему команд с пульта, если управление осуществляется вручную;
- корректировке полета, в т.ч. в больших формациях.
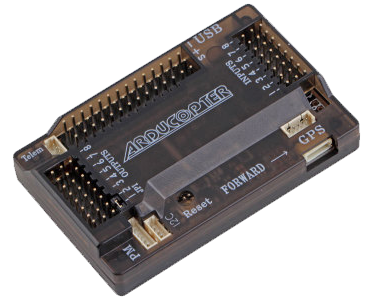
Полетный контроллер Arducopter
Полетный контроллер DJI A3
Полетные контроллеры присутствуют на рынке как самостоятельно, так и в составе готовых дронов.
Среди готовых решений широко известны китайские DJI. Вслед за полетным контроллером, шесть лет назад, китайцы предложили SDK, с которым можно создавать вполне профессиональные решения. Вот лишь небольшой список уже решенных задач:
Языки и среды разработки
В двух словах программирование дрона сводится к контролю координат промежуточных точек и высоты над землей с одновременным управлением полезной нагрузкой в зависимости от поставленной задачи.
Используемый для программирования язык, как и среда разработки, определяется системой управления, а в случае с проприетарными решениями — производителем контроллера.
Но пока на рынке царит настоящий зоопарк подходов и языков.
Часть производителей вообще предлагает собственные среды — как упомянутый выше DJI.
Сообщества, разрабатывающие опенсорсные полетные контроллеры, от них не отстают. Исторически сложилось, что большинство DIY решений основано на среде Arduino. Тот же Ardupilot в свое время разрабатывался для управления дроном с контроллером ATMega 2560, а в качестве среды разработки использовал оболочку Arduino.
Но сегодня этого уже недостаточно. Задачи, возложенные на беспилотники, усложняются, а вслед за этим растут требования к железу и ПО. Так что аппаратная составляющая меняется. Даже опенсорсные решения уже базируются не на контроллерах, а на полноценных процессорах с ARM-архитектурой (по аналогии со смартфонами).
Среды разработки, соответственно, также дорабатываются и усложняются. Они становятся кроссплатформенными, но пока все еще ориентированы на конкретный автопилот. И хотя на данный момент существуют общепринятые частные стандарты (например, передачи данных или взаимодействия беспилотников с наземными станциями), до выявления лидера среди языков разработки и SDK пока далеко.
С точки зрения гарантированного выбора направления развития этот этап становления рынка абсолютно непредсказуем. Однако именно сейчас время самых интересных проектов, ведь столько задач еще не решено!
Заключение
Ответим на частые вопросы


