

- Миф о полной дешевизне
- Детали самодельного квадрокоптера
- Электромоторы
- Полетный контроллер
- Лопасти
- Батарея
- Зарядное устройство
- Что потребуется в самом начале
- Процесс сборки
- 1: Строим раму
- Выбор формы квадрокоптера
- Как подключить электронику всего квадрокоптера
- Что стоит учесть при подборе всех запчастей
- Настройка квадрокоптера
Миф о полной дешевизне
Если вы новичок в авиамоделировании, то следует смириться, что это не дешёвая затея.
Сейчас «полетят тапки», что гуляет видео в сети, где небольшой дрон собрали из подручных материалов и средств всего за 50 рублей, потратив всего 2 часа времени.
Приглядитесь — это прикол. Очень жаль, если вы поверили, что саморезы, пластиковая посуда и алюминиевые уголки смогут в сборе стать полноценным коптером.
Разочаровала информация? Тогда лучше уж купить готовый квадрик RTF (готов к полету, ready to fly) и не морочить голову.
Детали самодельного квадрокоптера
Двигатели для квадрокоптера, 4 шт –
Регуляторы оборотов, 4 шт –
Воздушные винты – и , последние – правого вращения, на коптер ставятся парное количество винтов прямого и обратного вращения.
Разъем подключения – это силовой разветвитель для регуляторов Multistar (ХТ60 на 4 X 3.5мм)
Плата управления квадрокоптером – , подсоединяется к компьютеру по usb, позволяет заливать настройки и конфигурации.
Аккумулятор – , лучше брать сразу пару, так как выезжать ради полетов на одном аккумуляторе быстро надоедает. Я обычно с собой на выезд беру не менее 4-х аккумуляторов.
Зарядное устройство – , зарядник необходим для перезарядки аккумулятора.
Кроме этого потребуется аппаратура радиоуправления квадрокоптером. Я предпочтение отдаю , это наилучшее соотношение цена/качество. Дальность радиоуправления около 800-900 метров. Приемник идет в комплекте с передатчиком.
Соединители платы управления с приемником , они позволяют легко соединить приемник и мозги квадрокоптера.

«Силиконовые» провода для удлинения питания моторов – , – взять пару штук того и другого.
- Рама
- Электромоторы 4 шт.
- ESC или электронный регулятор скорости 4 шт.
- Плата управления
- Радио передатчик и приемник сигнала
- Лопасти 4 шт. (2 — для вращения по часовой стрелке и 2 — против часовой)
- Батарея и зарядное устройство для нее
Кроме того вам понадобятся всякие мелкие запчасти, материалы такие как хомуты, двусторонний скотч, проволока, держалка для батареи, перемычки, болтики и т.п., но обо всем по порядку. Нужны будут еще и кое какие инструменты. У вас должен быть паяльник с не сильно толстым жалом и вы должны уметь им пользоваться, отвертка, шестигранные ключи, плоскогубцы, клей или лучше клеевой пистолет. А теперь мы пробежимся подробно по каждой детали в отдельности и дадим уже более конкретные советы.
В принципе любой летательный аппарат должен иметь в своей основе раму, а если говорить о квадрокоптерах, тот тут это очень критично. При выборе рамы нужно рассматривать три ее характеристики: вес, размер и материал, из которого она изготовлена. Мы рекомендуем использовать DJI FlameWheel F450 или что-то аналогичное.
Рама эта сборная и цена ей порядка 20$ (аналоги в районе 15$). Она прочная, легкая и в ней уже есть PBN (распределительная плата), на которой все можно аккуратно и легко собрать. Так же к ней подходит целая куча разнообразных дополнительный прибамбасов. Если для вас дороговато покупать раму от DJI, то можно найти ее аналог (клон), он будет дешевле, а по качеству мало чем отличаться.
Электромоторы
Для чего нам нужны моторы? А для того чтобы крутить пропеллеры, которые и поднимут нашу птичку в воздух. В интернете можно найти тысячи разнообразных моторов для квадрокоптера от абсолютно дешевых до заметно дорогих. Комплект из 4-х достойных моторов стоит примерно 30$, но можно конечно найти и гораздо дешевле.
Моторы отличаются по мощности, которая указывается в кВт и чем она больше, тем быстрее он будет вращать свой пропеллер при постоянном напряжении. При покупке электромотора посмотрите обязательно на то, сколько силы тока в амперах нужно будет иметь на ESC и какой размер лопастей оптимален для данного экземпляра двигателя.
ESC отвечает за то, с какой скоростью крутится электромотор в конкретный момент времени. Вам таких штук надо 4, по одному на каждый мотор. А сам регулятор ESC уже подключается напрямую к батарее проводами или через плату управления. Большинство этих регуляторов идут со встроенным BEC (Блок Исключения Батареи или регулятор со встроенным стабилизатором напряжения, а проще говоря «стабилизатор»), который позволяет запитывать такие вещи как плата управления полетом и радиоприемник без прямого их подключения к источнику питания, т.е. батарее.

Наличии в конструкции регулятора скорости (ESC) крайне важно, т.к. он задает точную скорость вращения для каждого мотора, а все они должны вращаться с одинаковой скорости, чтобы обеспечить стабильность квадрокоптера в воздухе. Сейчас принято, при построении мультироторных аппаратов, использовать регуляторы с прошивкой SimonK.
Полетный контроллер
Плата полетного контроллера — это мозг квадрокоптера. На ней располагаются важные датчики такие как гироскопы и акселерометры, которые отвечают за скорость вращения каждого электромотора. Платы эти могут быть простыми и очень сложными и соответственно дорогими. Мы рекомендуем для первого вашего квадрокоптера полетную плату типа HobbyKing KK2.1.5.
или аналогичную Она вполне доступна по цене, что то около 20$, проста в установке и обладает хорошей функциональностью. Она еще хороша тем, что может работать на любом мультироторном летательном аппарате, так что если вам, вдруг, в дальнейшем захочется построить гексакоптер, новый полетный контроллер покупать не нужно будет.
Передатчик и приемник отвечают за управление квадрокоптером. Что конкретно выбирать не так принципиально, главное чтобы у него был 4-х канальные передатчик с KK2.0 управляющей платой. Но лучше все таки покупать 8-ми канальный, он более гибкий для возможных будущих ваших проектов, которые и потребуют больше каналов для связи.
Хорошим выбором будет Turnigy 9xR Pro. Цена его возможно немного кусается, 100$, но он очень функционален, 24-канальный и его можно будет использовать и в дальнейшем для любых радиоуправляемых аппаратов. Универсальная штука. Он очень популярен среди радиолюбителей и пользователей этого пульта очень много, так что всегда можно будет найти ответ на вопрос по настройке или решению какой либо проблемы, т.к. скорее всего то, с чем вы столкнулись уже проходилось кем то другим и готовое решением уже есть.
Лопасти
Квадрокоптеру нужно 4 лопасти, 2 обычных с вращением по часовой стрелке и две «толкающие» с вращением против часовой стрелки. В маркировке толкающие лопасти помечаются буквой «R» после размера. Мы чаще всего используем лопасти с размером 22*12 см. (9*4,7 дюймов). Материал изготовления пластик.
Батарея
На такие летательные аппараты как квадрокоптер устанавливаются чаще всего аккумуляторные батареи типа LiPo. Они могут быть разного размера и емкости. Мы используем батареи типа 3S1P, что означает 3 ячейки соединенных параллельно. Каждая ячейка дает напряжение 3,7В, итоговое напряжение на выходе 11,1В.

Так же у каждой аккумуляторной батареи есть показатель C, который говорит о том, сколько тока она может отдать (её токоотдача), измеряемая в Амперах. И емкость батареи, измеряемая в амперЧасах. И тут есть прямая зависимость между мощностью (емкостью) батареи и её весом, так что тут нужно найти золотую середину между продолжительностью полетом и общим весом летательного аппарата.
Зарядное устройство
Зарядка LiPo батарей очень сложный процесс, т.к. каждая из них состоит из нескольких ячеек, которые нужно заряжать и разряжать одним и тем же током. У вас должно быть сбалансированное зарядное устройство. На рынке сейчас можно найти кучу подходящих зарядников, но старайтесь избегать слишком дешевых или безымянных, т.к.
Что потребуется в самом начале
Если всё-таки есть желание сделать самостоятельно, то для начала следует иметь руки из правильного места, а именно, из плеч. Также хотя бы поверхностные познания в электронике и немного — в программировании, решительность и отсутствие лени и, конечно же, детали по списку.
Ах да, ещё следует определиться с основной функцией дрона. В самом начале лучше делать квадрокоптер без камеры. Нужно набить руку в управлении, чтобы одно из дорогостоящих оборудований не разбилось или утонуло.
Немаловажная деталь для начинающих — место, где вы будете выпускать для полётов свой первый дрон. Городская местность отпадает сразу, так как дома, деревья и провода будут мешать пробным полётам. Парк также не подходит. Одно неправильное движение — пострадать может отдыхающий и ваше новоиспечённое детище. Лучше выйти в чистое поле и рулить квадриком в своё удовольствие.
Процесс сборки
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;

рама для квадрокоптера с камерой своими руками
Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей. Чтобы их прикрутить (двигатели), можно использовать крепления, те что используют для крепления труб к стенам при проводке проводов.
С помощью таких труб получается довольно-таки хорошая конструкция, на которой надежно можно закрепить все детали квадрокоптера и и камеру. Итак, у нас почти готов квадрокоптер с камерой своими руками, осталось все это правильно собрать и отправиться на испытательные полеты.
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.







- квадрокоптер с камерой своими руками

- рама для квадрокоптера с камерой своими руками
Как подключить электронику к устройству? Соберите ее по инструкции, которая показана ниже.

Чтобы соединить мотор и регулятор, необходимо нарастить провода, для этого используйте силиконовую оболочку, так как она лучше будет функционировать при холодных температурах воздуха.

схема квадрокоптера
Для начала надо определиться – будете использовать стандартную раму или решите изготовить свою.
Покупная рама удобна, но в случае поломки придется ждать, пока приедет запасная деталь. Самодельная рама квадрокоптера собранная своими руками позволяет починить поломку за 20-30 минут, но требует дополнительной работы при изготовлении квадрокоптера.
Наиболее простым вариантом является использование пластиковых труб для проводки проводов. Они легкие и достаточно прочные. К тому же можно купить и поворотные части и крепления к стене, которые подходят для крепления электродвигателей к раме.
В результате получается очень прочная конструкция которая позволяет возить не только электронику самого квадрокоптера, но и камеру для видеосъемки с квадрокоптера.
Вот видео по сборке квадрокоптера из таких труб.
Можно сделать и раму из алюминиевых квадратных трубок.

Существует масса вариантов компоновки и конструкции мультикоптеров, но наиболее распространены именно модели с четырьмя винтами. Поэтому сборка такого квадрокоптера послужит примером для поэтапного обзора процесса сборки. В процессе можно опираться на примерные чертежи квадрокоптеров из сети или составленные самим.
1: Строим раму
Независимо от габаритов или назначения каждый дрон должен иметь раму, каркас, несущую основу. Сборка готовых рам не должна вызывать сложностей ввиду того, что они снабжаются подробными инструкциями и всем необходимым крепежом.
А чтобы собрать раму самому, придется проявить конструкторские способности. Самостоятельно изготовленная рама квадрокоптера из металла, пластика, металлопластика или дерева должна быть достаточно прочной. К примеру, толщина деревянных частей каркаса, изготовленного своими руками, должна быть не менее 30 мм. Сборка своего квадрокоптера на недостаточно прочной раме – пустые усилия, потому что он будет часто ломаться.
В любом случае на выходе должно получиться заданное количество лучей одинаковой длины, которые несут на себе моторы и крепятся к центральной несущей пластине. На ней же установлены посадочные опоры или «ноги». В некоторых вариантах компоновки ноги «растут» из-под двигателей. Все зависит от особенностей, продиктованных чертежом квадрокоптера и его рамы.
Двигатели, их контроллеры и пропеллеры играют ключевую роль в скорости, маневренности и других характеристиках полета. Поэтому следует выбирать продукцию брендов, тесно работающих в сфере квадрокоптеростроения, а не кого-нибудь, кто оказался в этом сегменте рынка случайно.
Да, движение происходит за счет разницы в скорости их вращения, но она должна быть строго контролируемой. Разношерстная компания двигателей нарушала бы баланс. Крепятся винтами на наружные концы «лучей».
После двигателей на плоскости их опор размещаются контроллеры оборотов и фиксируются стяжками. Соединение контроллеров с двигателями, также как с распределительной платой, осуществляется путем прямой пайки и коннекторов. При желании и бюджетных возможностях можно использовать контроллер 4-в-1, но тогда немного изменится схема компоновки квадрокоптера. В итоге получится почти готовый коптер, которому не хватает только полетного контроллера.
Полетный контроллер, как правило, монтируется в верхней части каркаса аппарата, над распределительной платой и отсеком для батареи. Компоновку допустимо изменять, но стоит помнить, что чем ниже центр тяжести, тем устойчивей аппарат.
Для минимизации влияния вибраций на работу полетного контроллера, его монтажная площадка часто крепится на резиновые проставки или используются более хитрые системы гашения вибраций. На этапе проектирования это хорошая возможность блеснуть инженерной смекалкой, не нанеся непоправимого вреда всей конструкции.
И только размещать на корпусе, подключение допустимо только после первичной калибровки полетного контроллера.
Различные производители выпускают разные контроллеры, пульты управление и другие компоненты. Поэтому их калибровка – сложный и вариативный процесс, достойный отдельного рассмотрения.
Собранное устройство должно быть полностью откалибровано, а на пульте следует установить управление. Только после этого можно будет подыматься в воздух, не опасаясь потерять плод своих трудов. Однако точное описание процесса калибровки зависит от типа используемого контроллера и аппаратуры, поэтому следует уточнять необходимые шаги, исходя из этих данных.
Только потратив 200-300 долларов на компоненты, несколько дней на сборку, настройку и калибровку, можно наконец отправляться в полет на собственноручно построенном квадрокоптере. Нельзя не отметить, что за те же деньги доступны вполне функциональные серийные модели. Но дело ведь не в этом.
Приведенная выше инструкция достаточно поверхностна, но она дает очертания того, с чем придется столкнуться, чтобы квадрокоптер собрать. Постепенные уточнения помогут накопить хорошую теоретическую базу для последующего развития.

Подводя итоги, нужно отметить, что самостоятельно построенные дроны уступают в характеристиках моделям заводского производства, особенно если первые – дело рук начинающего конструктора.
Вот только дело в том, что самодельный квадрокоптер и не стремится конкурировать с титанами рынка. Это выбор для тех, кто любит погружаться в интересующую тему, конструировать или совершенствовать конструкции.
Выбор формы квадрокоптера
В первую очередь следует определиться с количеством лучей и винтов на коптере. Есть большое разнообразие в модификациях и внешних видах летающих дронов, исходя из количества лучей, выходящих из центра рамы, бывают три-, квадро-, гекса- и октокоптеры.Количество пропеллеров может быть больше, чем лучей. Но название не меняется. Например, у квадрокоптера на каждом луче по два двигателя с пропеллерами — это не делает его октокоптером.
Из названия статьи понятно, что речь пойдёт о дронах, у которых четыре оси (и стандартно четыре мотора).Форма расположения лучей на квадролёте тоже бывает разная ( , Х или Н — образные).
Как подключить электронику всего квадрокоптера
Вся электроника собирается как на картинке ниже.

Для соединения моторов с регуляторами потребуется наращивание проводов. Это можно сделать с помощью любого подходящего провода, желательно с силиконовой оболочкой – она не трескается на морозе, вы ведь будете делать на квадрокоптере зимой, не так ли?
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.
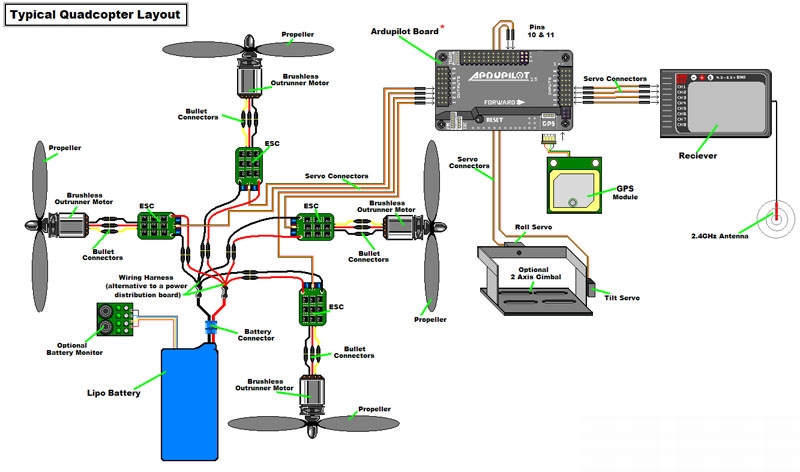
инструкиция подключения квадрокоптера eng
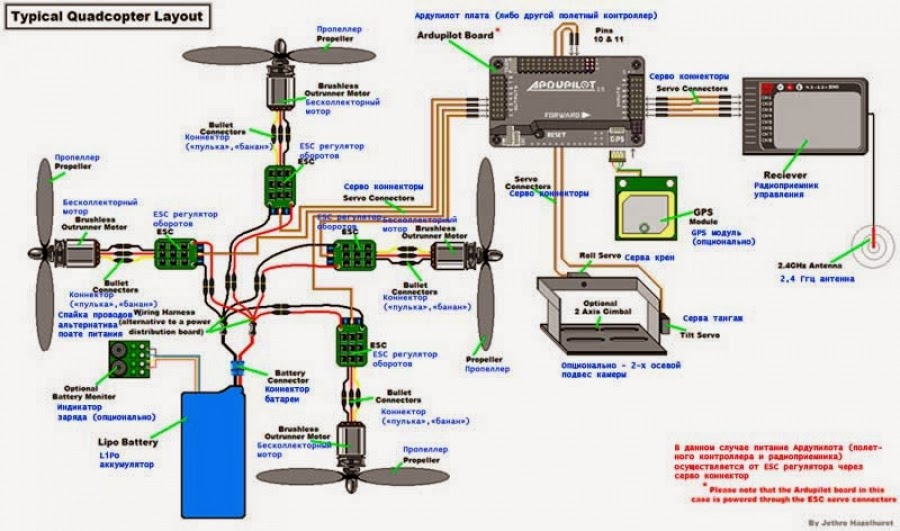
инструкция подключения квадрокоптера rus
При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.

Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
схема квадрокоптера
Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV-квадрокоптера с камерой, следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.

Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а также для тестирования коптера в домашних условиях на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.
Если в перспективе использование экшн-камеры, следует оставить место для приёмника и передатчика сигнала камеры на планшет и место для ее крепежа.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).

Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter — это его «мозги», а именно, контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму — гироскоп и акселерометр.
Настройка квадрокоптера
Настройка квадрокоптера требует изучения инструкции, просто подключить и полететь не получится. Необходимо загрузить ПО для «мозга» квадрокоптера с сайта, выбрать конфигурацию квадрокоптера, настроить параметры и залить все это по USB в плату управления.
Тут лучше всего обраться к профессионалам, прочитать форум по квадрокоптерам или попросить настроить того, кто уже разбирался с подобной настройкой.
Дело в том, что прошивки выпускаются достаточно часто, а каждая прошивка весьма сильно отличается от предыдущей. Так что рассказывать как настраивать на текущей особого смысла не имеет.





 купить по привлекательной цене 46990 руб. в Москве")